python线性回归实现
import random
import torch# ①根据带有噪声的线性模型构造一个人造数据集。 使用线性模型参数w=[2,−3.4] b=4.2和噪声项ϵ生成数据集及其标签
def synthetic_data(w, b, num_examples):"""生成 y = Xw + b + 噪声。"""# 生成均值为0,标准差为1,行为num_examples = 1000,列为len(w)=2的矩阵,也就是从一个标准正态分布N~(0,1),提取一个1000*2的矩阵。X = torch.normal(0, 1, (num_examples, len(w)))# 此时X为1000*2的矩阵,也就是二维张量,w为向量,也就是一维张量,符合normal运算的第四种情况,此时将w转置为列向量,也就是2*1的矩阵,做矩阵乘法结果为1000*1的列向量。y = torch.matmul(X, w)+b# 生成均值为0,标准差为0.01的噪声加上y,返回新的yy += torch.normal(0, 0.01, y.shape)# 返回X 将y转置成1列后返回return X, y.reshape((-1, 1))
# 定义w
true_w = torch.tensor([2, -3.4])
# 定义b
true_b = 4.2
# 生成数据集和标签
features, labels = synthetic_data(true_w, true_b, 1000)
# 打印第一个特征和标签,观察数据集和特征格式
print('features:', features[0], '\nlabel:', labels[0])# ②定义一个data_iter 函数, 该函数接收批量大小、特征矩阵和标签向量作为输入,生成大小为batch_size的小批量
def data_iter(batch_size, features, labels):# features的len应该是1000num_examples = len(features)# rang(1000)的一个数据再list一下组成一个列表indices = list(range(num_examples))# 把序列进行一下乱序random.shuffle(indices)# 返回一个数据集和标签for i in range(0, num_examples, batch_size):batch_indices = torch.tensor(indices[i:min(i + batch_size, num_examples)])yield features[batch_indices], labels[batch_indices]
# 定义尺寸
batch_size = 10
# 打印
for X, y in data_iter(batch_size, features, labels):print(X, '\n', y)break# ③定义 初始化模型参数
w = torch.normal(0, 0.01, size=(2, 1), requires_grad=True)
b = torch.zeros(1, requires_grad=True)# ④定义模型
def linreg(X, w, b):"""线性回归模型。"""return torch.matmul(X, w) + b# ⑤定义损失函数
def squared_loss(y_hat, y):"""均方损失。"""return (y_hat - y.reshape(y_hat.shape))**2 / 2# ⑥定义优化算法
def sgd(params, lr, batch_size):"""小批量随机梯度下降。"""with torch.no_grad():for param in params:param -= lr * param.grad / batch_sizeparam.grad.zero_()# ⑦训练过程
# 定义学习率(理解为梯度下降中的步长不知道对不对)
lr = 0.03
# 定义学习几轮
num_epochs = 5
# 定义网络
net = linreg
# 定义损失函数
loss = squared_lossfor epoch in range(num_epochs):for X, y in data_iter(batch_size, features, labels):l = loss(net(X, w, b), y)l.sum().backward()sgd([w, b], lr, batch_size)with torch.no_grad():train_l = loss(net(features, w, b), labels)print(f'epoch {epoch + 1}, loss {float(train_l.mean()):f}')print(f'w的估计误差: {true_w - w.reshape(true_w.shape)}')print(f'b的估计误差: {true_b - b}')
学习第三轮时候基本已经稳定
epoch 1, loss 0.035958
w的估计误差: tensor([ 0.0963, -0.1706])
b的估计误差: tensor([0.1828])
epoch 2, loss 0.000128
w的估计误差: tensor([ 0.0048, -0.0085])
b的估计误差: tensor([0.0081])
epoch 3, loss 0.000050
w的估计误差: tensor([ 0.0003, -0.0001])
b的估计误差: tensor([0.0006])
epoch 4, loss 0.000050
w的估计误差: tensor([4.5466e-04, 1.8120e-05])
b的估计误差: tensor([0.0004])
epoch 5, loss 0.000050
w的估计误差: tensor([3.6359e-05, 3.4094e-05])
b的估计误差: tensor([0.0004])Process finished with exit code 0
相关文章:

python线性回归实现
import random import torch# ①根据带有噪声的线性模型构造一个人造数据集。 使用线性模型参数w[2,−3.4] b4.2和噪声项ϵ生成数据集及其标签 def synthetic_data(w, b, num_examples):"""生成 y Xw b 噪声。"""# 生成均值为0,标…...
【JavaEESpring】认识Spring
认识Spring 1. 什么是框架2. SpringBoot 介绍2.1 Spring 的介绍2.2 SpringBoot 1. 什么是框架 框架(Framework) ,意思是框架、机制、准则。通俗的来讲: 框架是实现某种功能的半成品, 他提供了⼀些常⽤的⼯具类, 我们在框架的基础上, 可以更加⾼效的进⾏开发 后端框…...
)
Rust逆向学习 (5)
文章目录 Reverse for Vecvec! 与 添加元素元素访问元素遍历枚举数组弹出最后一个元素——pop 总结 本文将对Rust中的通用集合类型——动态数组 Vec进行学习,对应参考书中的第8章。 Reverse for Vec Vec是Rust中的动态数据结构,与C中的vector功能类似。…...
)
89.STL-函数对象的使用(仿函数)
目录 1.什么是函数对象 2.仿函数示例 3.代码示例 1.什么是函数对象 函数对象是C中的一种编程概念,也称为函数符或仿函数。其实就是重载“()”操作符,使得类对象可以像函数那样调用。 分类:假定某个类有一个重载的operator(),而且重载的oper…...
文件管理技巧:按文件容量大小分类,自动移动至目标文件夹的方法
按文件容量大小分类可以帮助快速识别和筛选出不同大小的文件。这样做有很多好处。首先,可以轻松地查找和访问特定大小的文件,提高工作效率。其次,通过将不同大小的文件分类,可以更好地了解和掌控文件的使用情况,避免存…...
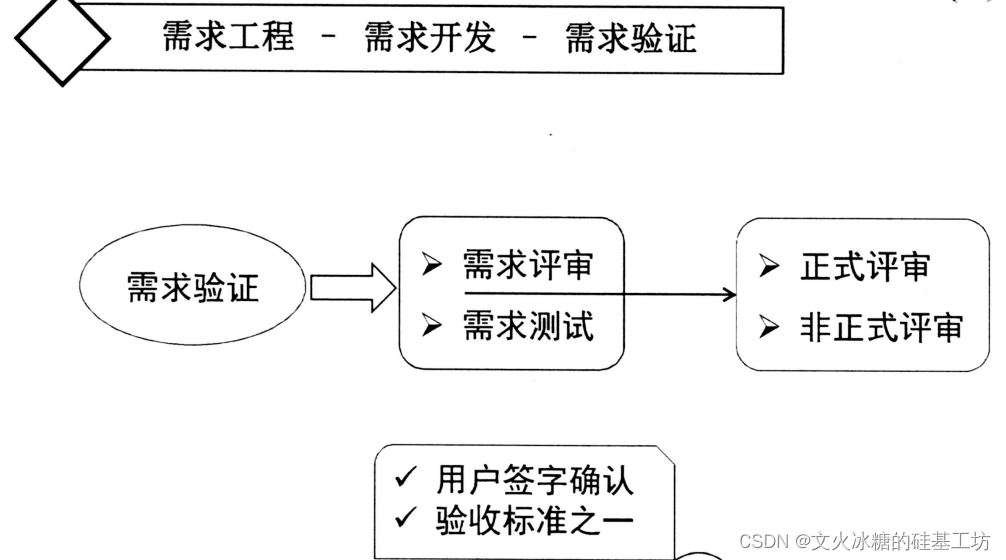
[架构之路-246]:目标系统 - 设计方法 - 软件工程 - 需求工程- 需求开发:获取、分析、定义、验证
目录 前言: 架构师为什么需要了解需求分析 一、需求工程概述 1.1 概述 1.2 需求工程的两大部分 (1)需求开发:系统工程师的职责、目标系统开发角度 (2)需求管理:项目管理者的职责、项目管…...
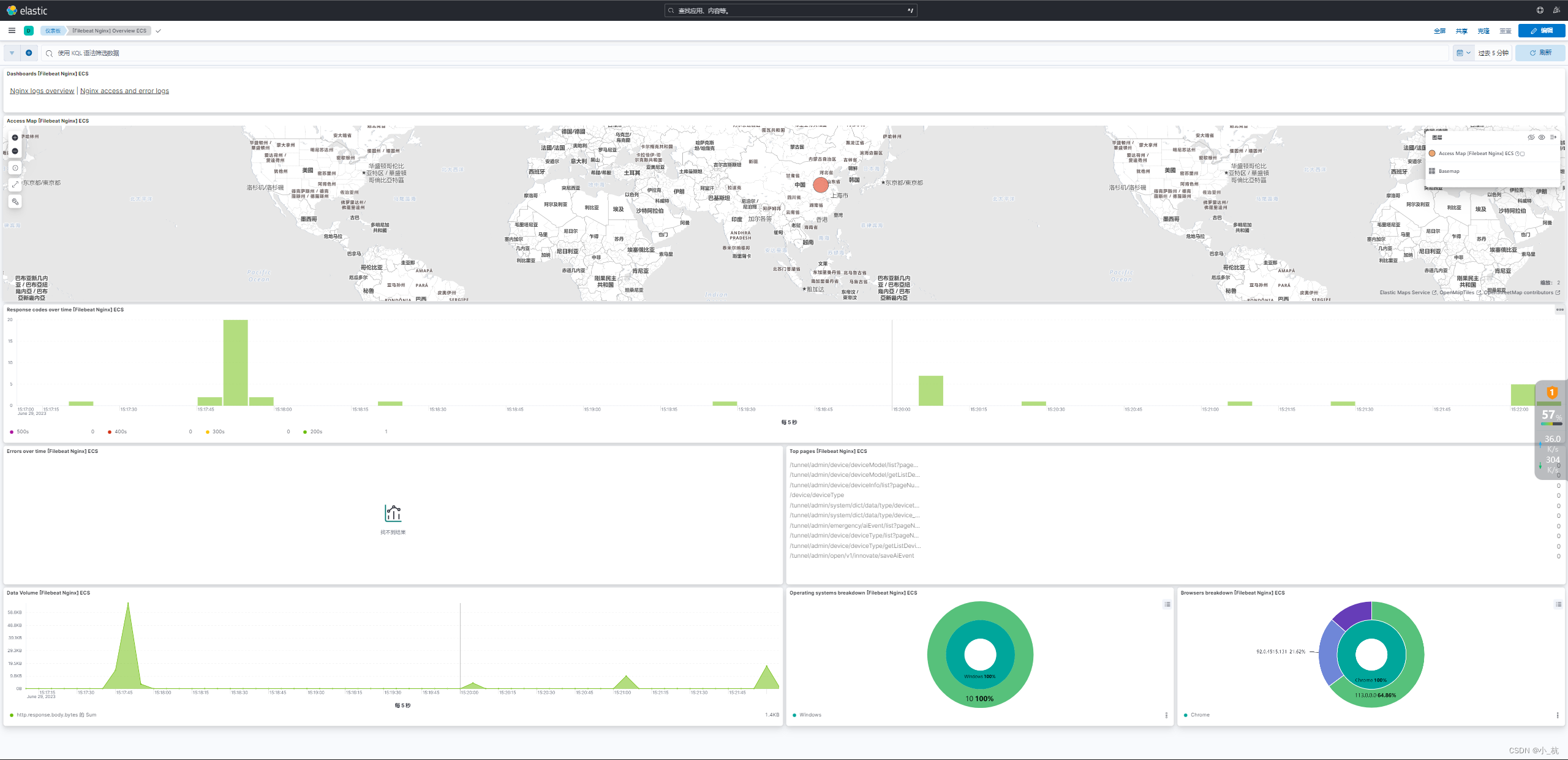
轻量日志管理方案-[EFK]
使用FileBeat进行日志文件的数据收集,并发送到ES进行存储,最后Kibana进行查看展示; 这个应该是最简单,轻量的日志收集方案了。 最总方案为:FileBeatESKibana ; 【Kibana过于强大,感觉可以无限扩展】 文章目…...
Halcon WPF 开发学习笔记:HSmartWindowControlWPF正常加载
文章目录 加载问题相关文章彻底解决 加载问题 我们在WPF中使用Halcon的时候,会出现图片被拉伸的问题,需要拖动才可以解决,我网上找了好久,终于找到了如何成功解决这个问题。 相关文章 3.7 Halcon 窗体显示对象消失问题 【halcon】…...
mybatis的简单教程
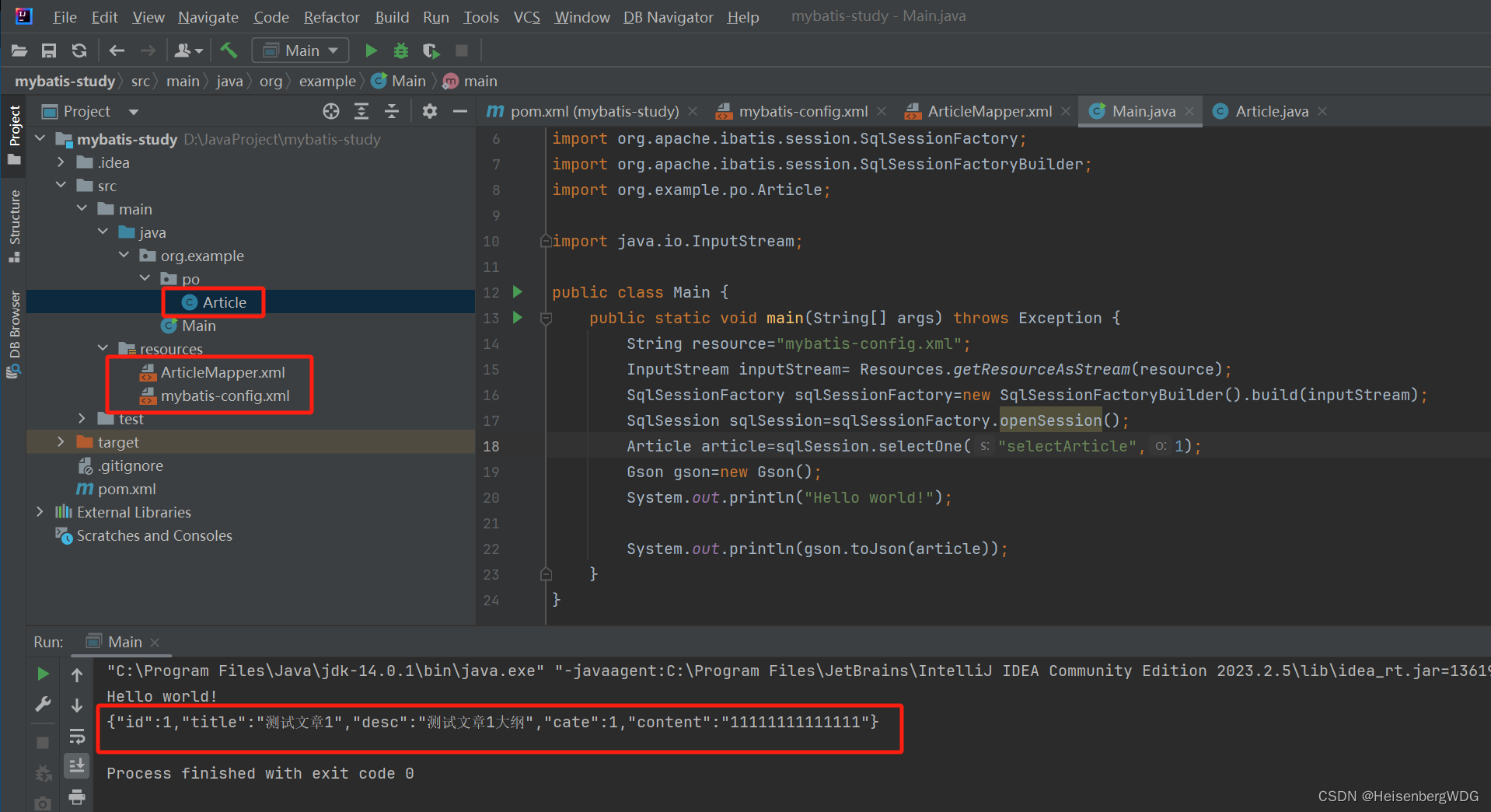
整体就是mysql里存了一张表,然后在java程序里用mybatis把数据读出来的一个简单示例。 库 blog里有一张表 article 整个项目就是增加了这3个文件 首先是mybatis-config.xml文件 <?xml version"1.0" encoding"UTF-8" ?> <!DOCTYPE c…...

数据结构 队列(C语言实现)
目录 1.队列的概念及结构2.队列的代码实现 正文开始前给大家推荐个网站,前些天发现了一个巨牛的 人工智能学习网站, 通俗易懂,风趣幽默,忍不住分享一下给大家。 点击跳转到网站。 1.队列的概念及结构 队列:只允许在…...
Android---屏幕适配的处理技巧
在几年前,屏幕适配一直是困扰 Android 开发工程师的一大问题。但是随着近几年各种屏幕适配方案的诞生,以及谷歌各种适配控件的推出,屏幕适配也显得越来越容易。下面,我们就来总结一下关于屏幕适配的那些技巧。 ConstraintLayout …...
vmware workstation 与 device/credential guard 不兼容
VM虚拟机报错 vmware虚拟机启动时报错:vmware workstation 与 device/credential guard 不兼容: 系统是win10专业版,导致报错原因最终发现是安装了docker,docker自带下载虚拟机Hyper-V,而导致vmware workstation 与 …...

第7章-使用统计方法进行变量有效性测试-7.2.1-单因素方差分析
目录 7.2 方差分析 7.2.1 单因素方差分析 组内变异 组间变异 总变异 随机误差...

黑客技术-小白学习手册
一、黑客是什么 原是指热心于计算机技术,水平高超的电脑专家,尤其是程序设计人员。但后来,黑客一词已被用于泛指那些专门利用电脑网络搞破坏或者恶作剧的家伙。 二、学习黑客技术的原因 其实,网络信息空间安全已经成为海陆空之…...
用示波器测量高压电
示波器本身是不可以测试几千v的高压电电路的,一般自带的探头衰减倍数不够,需要使用高压差分探头或者高压探棒,将测试信号衰减到合适的范围再接入示波器。 普通探头能测差分电压吗?差分探头和普通探头有什么区别?全网最…...

AQS中Node状态
在AQS(AbstractQueuedSynchronizer)中,Node 是一个用于构建等待队列的节点类,用于表示等待获取锁的线程。Node 的状态在不同的同步器中有不同的含义,但一般来说,Node 的状态可以分为以下几种: C…...
STM32 寄存器配置笔记——GPIO配置输出
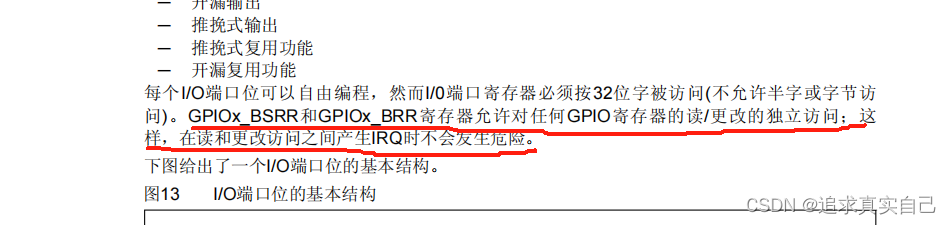
一、概述 本文主要介绍GPIO 作为输出时的寄存器配置。包括时钟配置,输出模式配置。以STM32F10xxx系列为例,配置PA8、PD2端口作为输出,输出高/低电平。 二、配置流程 1)GPIO外设时钟 通过查找STM32F10xxx中文参考手册得知…...
Spring boot 整合grpc 运用
文章目录 GRPC基础概念:Protocol Buffers:proto 基础语法:调用类型: Spring boot 整合 grpc项目结构:整合代码:父 pomproto 模块服务端:客户端:实际调用: 原生集成 GRPC基…...

C++ 模板保姆级详解——template<class T>(什么是模板?模板分哪几类?模板如何应用?)
目录 一、前言 二、 什么是C模板 💦泛型编程的思想 💦C模板的分类 三、函数模板 💦函数模板概念 💦函数模板格式 💦函数模板的原理 💦函数模板的实例化 🍎隐式实例化 🍉显式实…...
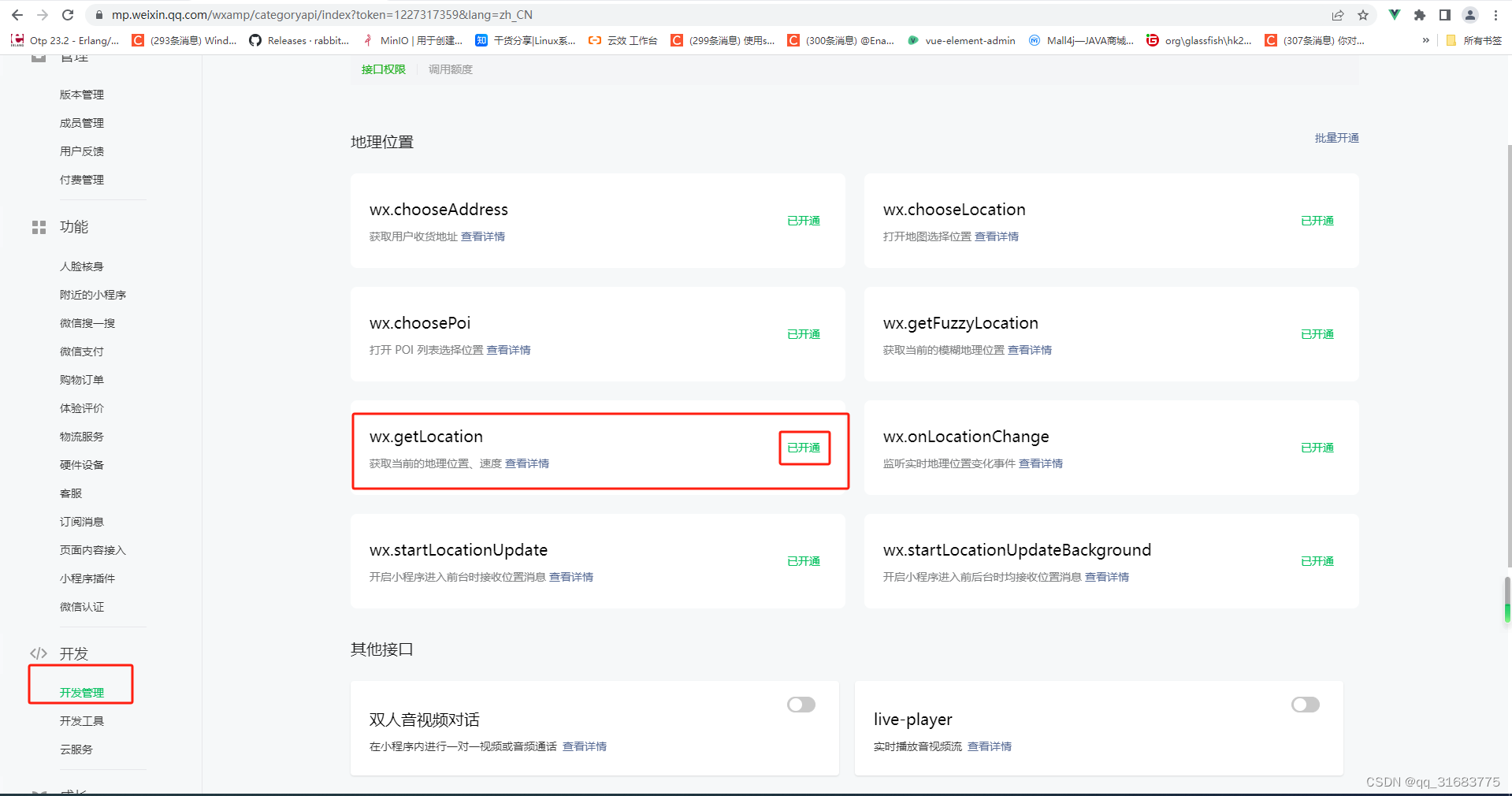
uni.getLocation() 微信小程序 线上获取失败
开发版,体验版,用此方法都可以正确获取定位,但是在小程序的线上,总是获取失败 参考:uni-app微信小程序uni.getLocation获取位置;authorize scope.userLocation需要在app.json中声明permission;小程序用户拒绝授权后重新授权-CSDN博客 uniapp 中的 uni.…...

详细解析Spring如何解决循环依赖问题居
AI训练存储选型的演进路线 第一阶段:单机直连时代 早期的深度学习数据集较小,模型训练通常在单台服务器或单张GPU卡上完成。此时直接将数据存储在训练机器的本地NVMe SSD/HDD上。 其优势在于IO延迟最低,吞吐量极高,也就是“数据离…...

用C语言和EasyX库写一个五子棋,我踩过的这些坑你别再踩了
用C语言和EasyX库写五子棋:那些教科书不会告诉你的实战陷阱 第一次用EasyX库写五子棋时,我以为三天就能搞定,结果花了三周时间调试各种奇葩问题。坐标计算差1个像素导致棋子永远对不齐、鼠标点击识别区域偏差、二维数组越界导致程序崩溃...这…...

【typst-rs】greet.rs文件
以下是对greet.rs的详细解析。 use std::io::{self, Read};/// This is shown to users who just type typst the first time. #[rustfmt::skip] const GREETING: &str color_print::cstr!("\ <s>Welcome to Typst, we are glad to have you here!</> ❤…...

HsMod终极指南:如何让炉石传说体验提升300%
HsMod终极指南:如何让炉石传说体验提升300% 【免费下载链接】HsMod Hearthstone Modification Based on BepInEx 项目地址: https://gitcode.com/GitHub_Trending/hs/HsMod 如果你是一位炉石传说玩家,是否曾经为漫长的动画等待、繁琐的开包操作或…...

LinuxServer.io LibreOffice 容器化部署:从基础搭建到生产级运维实战
1. 为什么选择容器化部署LibreOffice? 在团队协作场景中,文档处理工具就像空气一样不可或缺。但传统办公软件安装包动辄几百MB,跨平台兼容性差,版本升级更是让人头疼。三年前我负责为50人团队部署办公环境时,光是处理不…...

DOL-CHS-MODS整合包:2024一站式解决方案,3大优势助你轻松体验Degrees of Lewdity
DOL-CHS-MODS整合包:2024一站式解决方案,3大优势助你轻松体验Degrees of Lewdity 【免费下载链接】DOL-CHS-MODS Degrees of Lewdity 整合 项目地址: https://gitcode.com/gh_mirrors/do/DOL-CHS-MODS DOL-CHS-MODS整合包作为Degrees of Lewdity游…...
构建你的第一个灾害预测模型?)
Kaggle竞赛风向标:如何用地震数据集(如尼泊尔建筑数据)构建你的第一个灾害预测模型?
Kaggle竞赛实战:从地震数据到建筑损毁预测的完整机器学习流程 去年在尼泊尔参与灾后重建调研时,当地工程师递给我一份发皱的纸质表格——那是2015年大地震后他们手工录入的建筑评估记录。表格上"屋顶坍塌"、"地基移位"等潦草笔记背后…...

SDD基于规范编程-OpenSpec及SuperPowers沙
智能体时代的代码范式转移与 C# 的战略转型 传统的 C# 开发模式,即所谓的“工程导向型”开发,要求开发者创建一个复杂的项目结构,包括项目文件(.csproj)、解决方案文件(.sln)、属性设置以及依赖…...

6月PMP紧急预警:错过这次,下次难度让你哭!附60天极简通关计划
大家好,我是去年差点错过“末班车”的大头。 今天是4月6日。看到这个日期,我知道很多人心里在想什么:“还有两个月呢,急什么?” 我必须泼一盆冷水:留给你的时间真的不多了。 如果说之前还有机会摸鱼&…...

Qwen3.5-9B实战教程:WebSocket流式响应+前端实时渲染优化方案
Qwen3.5-9B实战教程:WebSocket流式响应前端实时渲染优化方案 1. 项目概述与核心能力 Qwen3.5-9B是一款拥有90亿参数的开源大语言模型,在多个领域展现出强大的能力: 强逻辑推理:能够处理复杂的逻辑问题,适合需要深度…...