在任何机器人上实施 ROS 导航堆栈的指南
文章目录
- 路径规划
- 参考
路径规划
路径规划是导航的最终目标。这允许用户向机器人给出目标姿势,并让它在给定的环境中自主地从当前位置导航到目标位置。这是我们迄今为止所做的一切(地图绘制和本地化)的汇集点。ROS 导航堆栈已经为我们完成了繁重的工作,就像我们在地图绘制和本地化中看到的那样。导航的路径规划部分是在名为 move_base 的包中实现的。在我们开始使用这个包之前,了解全局并了解关键细节非常重要。
使用的 ROS 节点:move_base
中间的大方框代表move_base节点,它是ROS导航堆栈的核心。它订阅了多个主题,包括映射部分中介绍的map_server 节点和本地化部分中介绍的amcl 节点。在 move_base 节点中,有很多事情需要在继续之前理解。
在 move_base 节点中,该图显示了四个主要项目。让我们一一了解它们。
- global_planner
- local_planner
- global_costmap
- local_costmap
Planner是一种算法,用于计算机器人从当前位置到用户提供的目标位置的路径。在 ROS 中,规划器依靠称为成本图的地图 来生成计划。稍后将解释成本图。让我们花一些时间来了解 move_base 节点中发挥作用的各种规划器。
move_base节点包括两种规划器——全局规划器和局部规划器。global_planner输出机器人从当前位置到目标位置的路径。ROS 中实现的几种不同的算法/规划器可以实现全局规划。常见的是 – carrot_planner 、 navfn 和 global_planner 。用户可以选择使用哪个 global_planner。此外,在使用任何这些全局规划器之前,用户需要配置一些参数。参数列表在此处给出。现在,对 global_planner 在宏观导航方案中的作用有了基本的了解,同样重要的是要提到 global_planner 依赖 global_costmap 来创建计划。在介绍成本图之前,我们还需要了解一下 local_planner。
local_planner还生成机器人在给定环境中移动的计划或路径。globa_planner 创建的计划将传递给 local_planner 执行。local_planner 依赖于 local_costmap 并生成一个本地计划,其中考虑了激光和里程计数据。有几个本地规划器可供使用。常见的是 – base_local_planner、dwa_local_planner、eband_local_planner、teb_local_planner。到目前为止,我们已经了解到 global_planner 和 local_planner 都依赖于代价图。让我们研究一下它们到底是什么。
ROS 中的成本图是2D 或 3D 占用网格矩阵/地图,其中每个网格或单元格都分配有 0 到 255 之间的值/成本。每个单元格中的值或成本用于由 globa_planner 和 local_planner 规划路径。这些值指示给定网格是空闲的、已占用的还是未知的。如果单元格是空闲的,则为其分配成本 0,如果单元格包含障碍物,则为其分配更高的值,例如 254。包含障碍物的单元格的成本基于以下因素膨胀(分散到)周围的单元格:用户指定的膨胀半径。请参阅本页有关“通货膨胀”的部分。要了解有关成本图的更多信息,请参阅 ROS wiki上的此页面以及此页面。这里还提供了一个简短的定义。此时,您可能想知道成本图是如何创建的?
首先,必须初始化代价图。这可以通过从本教程的映射部分中介绍的 map_server 节点提供静态地图或提供区域的固定宽度和高度来完成。ROS 导航堆栈使用两个成本图 - 一个称为global_costmap,由 global_planner 用于在整个环境上创建长期计划,第二个称为local_costmap,由 local_planner 用于创建短期计划,同时考虑到环境中的障碍物信息。我们主要使用静态映射来初始化global_costmap。请注意,为了使用用户提供的静态地图(通过map_server节点)初始化costmap,它必须与amcl节点结合使用,以便可以在地图框中注册障碍物信息。最后,我们通过给 local_costmap 一个固定的宽度和高度来初始化它。初始化后,当机器人在环境中移动时,local_costmap 会根据传感器数据进行更新。因此,如果在创建静态地图后将新对象/障碍物添加到环境中,它们将显示在 local_costmap 中,但不会显示在 global_costmap 中。
总结上面提出的概念, move_base 节点包含两个规划器 - 全局规划器依赖于基于 global_costmap 生成全局规划,而 local_planner 依赖于 local_costmap 来生成局部规划。简而言之,近距离路径规划的优化由local_planner完成,全路径由global_planner优化。这两个规划器和他们的成本图一起工作,为机器人创建一条路径,通过避开障碍物将其从一个点带到另一个点。
这就是 move_base 节点的概念部分。接下来,我们将开始使用它来使机器人在环境中自主移动。然而,我们需要首先满足先决条件,就像我们在地图绘制和本地化中所做的那样。
参考
https://prabhjotkaurgosal.com/a-guide-to-implementing-ros-navigation-stack-on-your-robot/4/
相关文章:
在任何机器人上实施 ROS 导航堆栈的指南
文章目录 路径规划参考 路径规划 路径规划是导航的最终目标。这允许用户向机器人给出目标姿势,并让它在给定的环境中自主地从当前位置导航到目标位置。这是我们迄今为止所做的一切(地图绘制和本地化)的汇集点。ROS 导航堆栈已经为我们完成了…...

Android 中注解的使用
Android Support Library 从 19.1 版本开始引入了一个新的注解库,其中包含了很多的元注解,使用它们修饰我们的代码, 可以让我们提高程序的开发效率,让我们更早的发现问题。以及对代码施以规范,让代码更加有可读性。这篇…...
我国陆地遥感卫星发展现状与展望
一、引言 从20世纪90年代末至今,我国陆地遥感卫星事业历经二十多年,实现了从无到有、从小到大、从弱到强的跨越发展。随着高分辨率对地观测系统重大专项(高分专项)、《陆海观测卫星业务发展规划(2011—2020年ÿ…...
arcgis基础篇--实验
一、绘制带空洞的面要素 方法一:先绘制出一个面区域,然后在面上再绘制一个面区域代表面洞,两者位于同一个图层内,选中代表面洞的区域,选择【编辑器】-【裁剪】工具,将面裁剪出一个洞,随后删除代…...
【chatglm3】(3):在AutoDL上,使用4090显卡,部署ChatGLM3API服务,并微调AdvertiseGen数据集,完成微调并测试成功!附视频演示。
在AutoDL上,使用4090显卡,部署ChatGLM3API服务,并微调AdvertiseGen数据集,完成微调并测试成功! 其他chatgpt 和chatglm3 资料: https://blog.csdn.net/freewebsys/category_12270092.html 视频地址&#…...
python爬虫top250电影数据
之前看到的,我改了一下,多了很多东西 import requests from bs4 import BeautifulSoup from openpyxl import Workbook from openpyxl.styles import Font import redef extract_movie_info(info):# 使用正则表达式提取信息pattern re.compile(r导演:…...

STL简介+浅浅了解string——“C++”
各位CSDN的uu们好呀,终于到小雅兰的STL的学习了,下面,让我们进入CSTL的世界吧!!! 1. 什么是STL 2. STL的版本 3. STL的六大组件 4. STL的重要性 5. 如何学习STL 6.STL的缺陷 7.为什么要学习string类 …...

wpf 和winform 的区别
WPF (Windows Presentation Foundation) 和 WinForms (Windows Forms) 是 Microsoft .NET 桌面应用程序开发中两种不同的技术框架,它们有一些重要的区别: 1. **UI 抽象层次结构:** - **WinForms:** 使用基于控件(Controls)的 …...

【Apifox】国产测试工具雄起
在开发过程中,我们总是避免不了进行接口的测试, 而相比手动敲测试代码,使用测试工具进行测试更为便捷,高效 今天发现了一个非常好用的接口测试工具Apifox 相比于Postman,他还拥有一个非常nb的功能, 在接…...
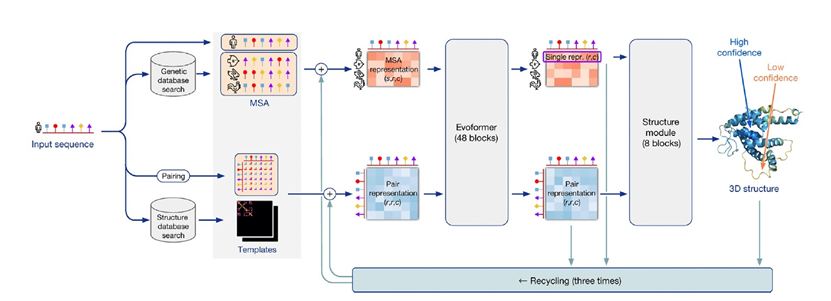
PNAS | 蛋白质结构预测屈服于机器学习
今天为大家介绍的是来自James E. Rothman的一篇短文。今年的阿尔伯特拉斯克基础医学研究奖表彰了AlphaFold的发明,这是蛋白质研究历史上的一项革命性进展,首次提供了凭借序列信息就能够准确预测绝大多数蛋白质的三维氨基酸排列的实际能力。这一非凡的成就…...

PlayCanvas通过IFrame嵌入页面如何与canvasplay脚本通讯
PlayCanvas可以通过IFrame嵌入HTML页面,实现混合编程,扩充PlayCanvas的页面功能。 问:在IFrame嵌入页面中如何与PlayCanvas通讯,调用PlayCanvas功能? 答:可以调用PlayCanvas的全局对象pc来访问其他脚本&…...

springboot整合Redis后间歇性io.lettuce.core.RedisCommandTimeoutException
在springboot中引入spring-boot-starter-data-redis依赖时,默认使用的时Lettuce 产生这种问题的原因有如下两点: 1、Lettuce 自适应拓扑刷新(Adaptive updates)与定时拓扑刷新(Periodic updates) 是默认关闭…...

基于springboot+vue的学生毕业离校信息网站
项目介绍 该学生毕业离校系统包括管理员、学生和教师。其主要功能包括管理员:首页、个人中心、学生管理、教师管理、离校信息管理、费用结算管理、论文审核管理、管理员管理、留言板管理、系统管理等,前台首页;首页、离校信息、网站公告、留…...
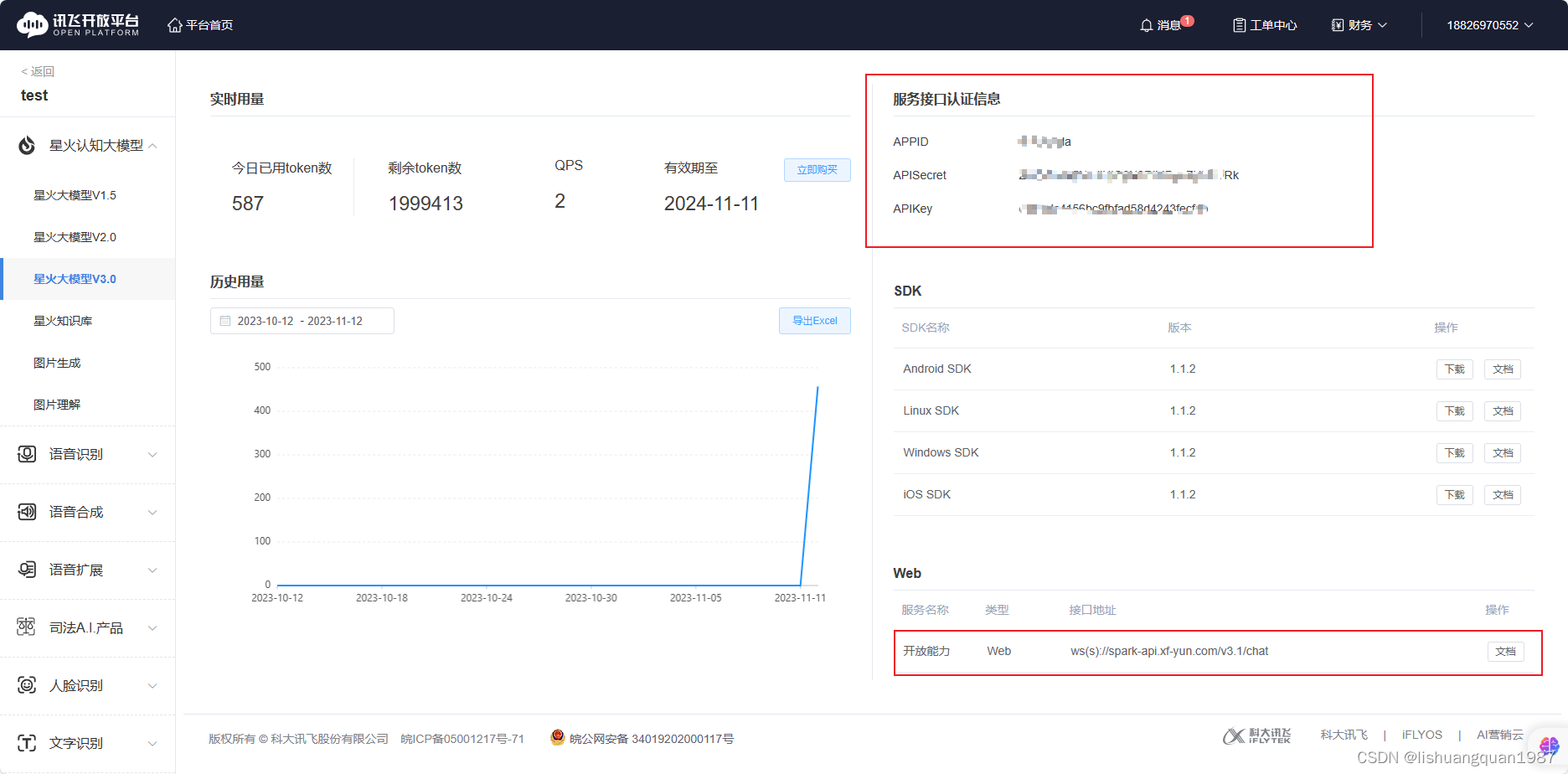
基于C#+WPF编写的调用讯飞星火大模型工具
工具源码:https://github.com/lishuangquan1987/XFYun.SparkChat 工具效果截图: 支持流式输出: 其中ApiKey/ApiSecret/AppId需要自己到讯飞星火大模型官网去注册账号申请,免费的。 申请地址:https://xinghuo.xfyun.cn/ 注册之…...
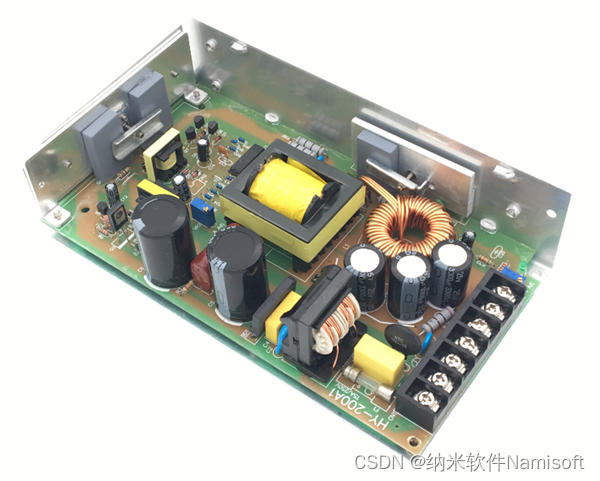
科普测量开关电源输出波形的三种方法及电源波形自动化测试步骤
开关电源波形测试就是对开关电源的输出波形进行检测和分析,观察开关电源参数变化,以此来判断开关电源的性能是否符合要求。好的开关电源对于设备以及整个电路的正常运行是非常重要的,因此开关电源输出波形测试是开关电源测试的重要环节&#…...

【优化版】DOSBox及常用汇编工具的详细安装教程
🌈个人主页:聆风吟 🔥系列专栏:网络奇遇记、图解数据结构 🔖少年有梦不应止于心动,更要付诸行动。 文章目录 📋前言一. dosbox的介绍、下载和安装1.1 dosbos简介1.2 dosbox的下载1.2.1 方式一&a…...
【Devchat 插件】创建一个GUI应用程序,使用Python进行加密和解密
VSCode 插件 DevChat——国内开源的 AI 编程! 写在最前面DevChat是什么?什么是以提示为中心的软件开发 (PCSD)?为什么选择DevChat?功能概述情境构建添加到上下文生成提交消息提示扩展 KOL粉丝专属福利介绍D…...
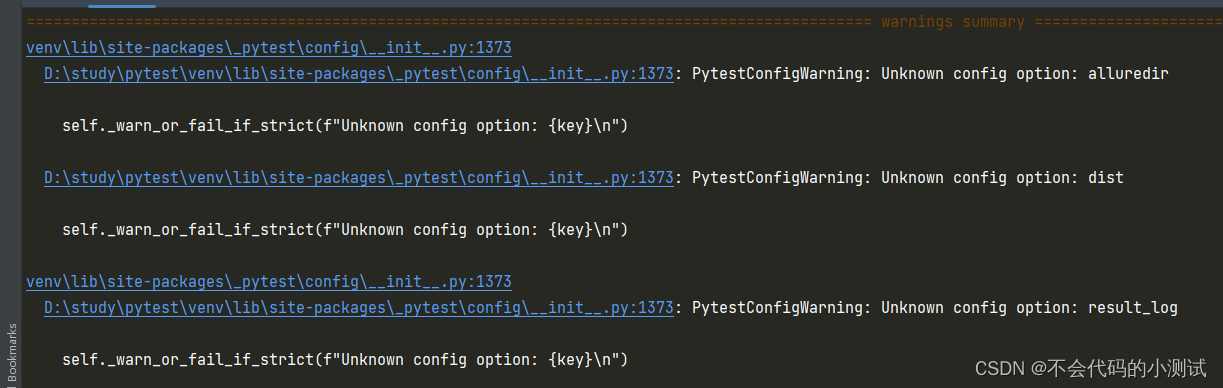
运行pytest时,给出警告 PytestConfigWarning: Unknown config option: result_log
问题:在ini中配置了一些选项后运行pytest,会出现下面的警告信息 解决:在ini中增加配置:addopts -p no:warnings...
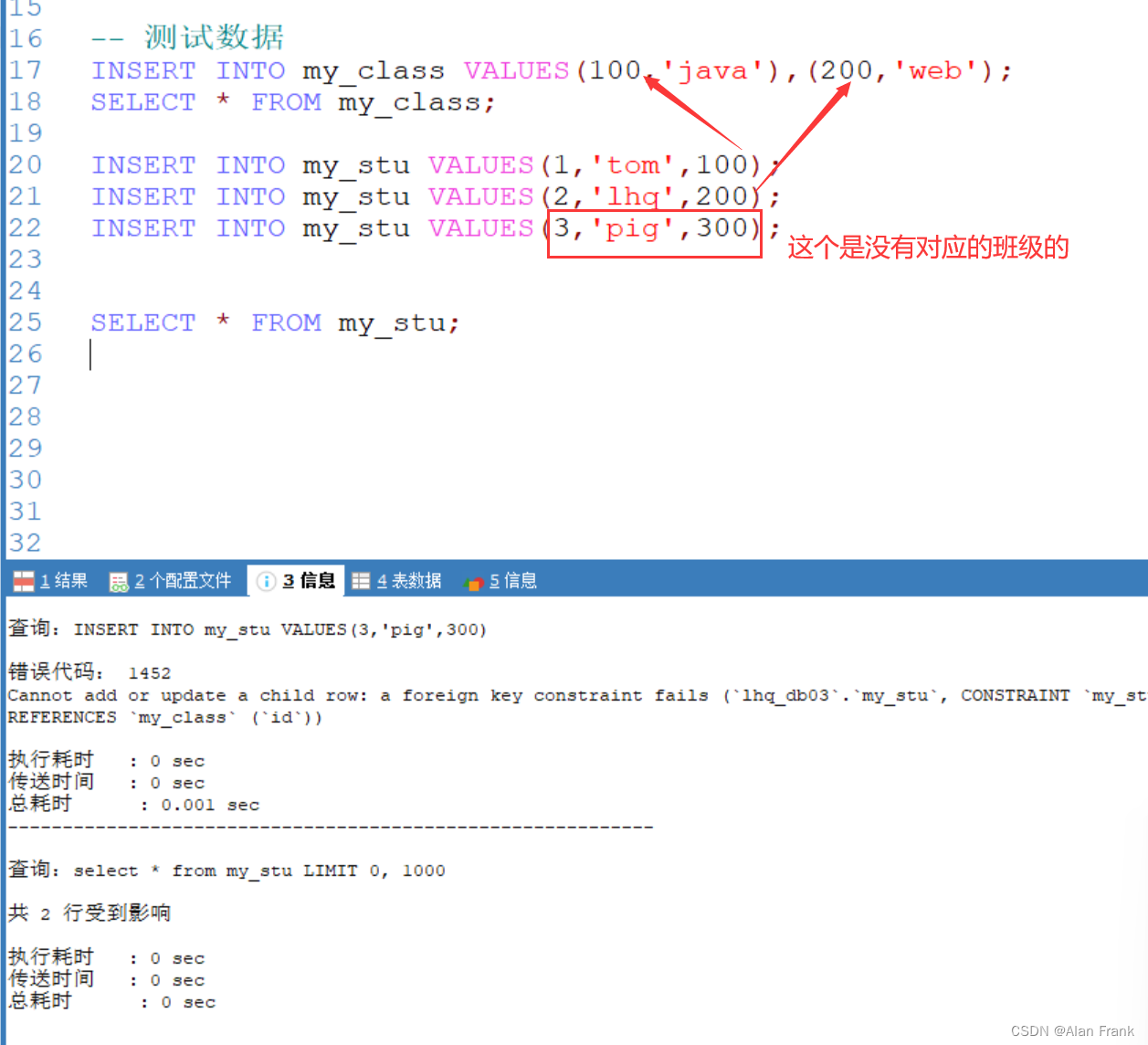
初始MySQL(五)(自我复制数据,合并查询,外连接,MySQL约束:主键,not null,unique,foreign key)
目录 表复制 自我复制数据(蠕虫复制) 合并查询 union all(不会去重) union(会自动去重) MySQL表的外连接 左连接 右连接 MySQL的约束 主键 not null unique(唯一) foreign key(外键) 表复制 自我复制数据(蠕虫复制) #为了对某个sql语句进行效率测试,我们需要海量…...

ssh秘钥登录
1.设置 SSH 通过密钥登录 密钥形式登录的原理是:利用密钥生成器制作一对密钥——一只公钥和一只私钥。 将公钥添加到服务器的某个账户上,然后在客户端利用私钥即可完成认证并登录。这样一来,没有私钥,任何人都无法通过 SSH 暴力…...

多智能体工程实践升级版:基于 Spring AI Alibaba 构建可扩展、高并发、生产级方案策划系统
多智能体工程实践升级版:基于 Spring AI Alibaba 构建可扩展、高并发、生产级方案策划系统 1. 引言 当业务问题从“问答”升级到“方案生成、任务拆解、跨角色协同、执行闭环”时,单一智能体往往很快碰到能力边界。 原因并不复杂: 单 Agent 擅长基于统一上下文做推理,但…...

号令天下:守财数字能量号组413与313能守财吗
在数字能量学的体系中,延年磁场是主导守财的核心能量,天医磁场主打招财纳福,生气磁场侧重拓展人脉,二者并不具备直接的守财属性。像 413、313 这类组合,核心作用集中在招财聚财方面,守财能力相对薄弱&#…...

OpenClaw技能组合拳:Qwen3.5-9B同时调度多个自动化模块
OpenClaw技能组合拳:Qwen3.5-9B同时调度多个自动化模块 1. 当办公自动化遇上混合专家模型 上周五下午,我正在手忙脚乱地处理堆积如山的邮件和会议安排时,突然意识到:这些重复性工作不正是AI最擅长的领域吗?于是决定用…...

2025届学术党必备的六大降重复率神器横评
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 当前,人工智能技术快速发展,这为毕业论文写作提供了新的辅助路径&…...

脉冲注入法与电感法无刷电机BLDC控制器方案
脉冲注入法,持续注入,启动低速运行过程中注入,电感法,ipd,力矩保持,无霍尔无感方案,媲美有霍尔效果。 bldc控制器方案,无刷电机。 提供源码,原理图。一、文档引言 本文基…...

从Kaggle到落地:Albumentations在医学影像分割和目标检测中的实战配置指南
从Kaggle到落地:Albumentations在医学影像分割和目标检测中的实战配置指南 医学影像分析和自动驾驶领域的数据增强,远不止是简单地对图像进行旋转或翻转。当处理MRI扫描中的肿瘤分割或CT影像中的器官定位时,每个像素的位移都可能影响诊断结果…...

从电桥到差分放大:三线制PT100测温电路的设计实践与精度考量
1. 三线制PT100测温电路的设计背景 温度测量在工业自动化、医疗设备、环境监测等领域都是基础且关键的技术需求。PT100作为一种广泛使用的铂电阻温度传感器,凭借其优异的线性度和稳定性,成为高精度测温的首选之一。但在实际应用中,如何准确测…...

5步解锁AMD显卡AI潜能:ollama-for-amd本地化部署全指南
5步解锁AMD显卡AI潜能:ollama-for-amd本地化部署全指南 【免费下载链接】ollama-for-amd Get up and running with Llama 3, Mistral, Gemma, and other large language models.by adding more amd gpu support. 项目地址: https://gitcode.com/gh_mirrors/ol/oll…...

m4s-converter:B站缓存视频本地化全解决方案
m4s-converter:B站缓存视频本地化全解决方案 【免费下载链接】m4s-converter 一个跨平台小工具,将bilibili缓存的m4s格式音视频文件合并成mp4 项目地址: https://gitcode.com/gh_mirrors/m4/m4s-converter 1. 价值定位:解决B站缓存文件…...
打破语言壁垒:Translumo屏幕实时翻译终极指南
打破语言壁垒:Translumo屏幕实时翻译终极指南 【免费下载链接】Translumo Advanced real-time screen translator for games, hardcoded subtitles in videos, static text and etc. 项目地址: https://gitcode.com/gh_mirrors/tr/Translumo 还在为看不懂游戏…...