记录pytorch实现自定义算子并转onnx文件输出
概览:记录了如何自定义一个算子,实现pytorch注册,通过C++编译为库文件供python端调用,并转为onnx文件输出
整体大概流程:
- 定义算子实现为torch的C++版本文件
- 注册算子
- 编译算子生成库文件
- 调用自定义算子
一、编译环境准备
1,在pytorch官网下载如下C++的libTorch package,下载完成后解压文件,是一个libtorch文件夹。

2,提前准备好python,以及pytorch
3,本示例使用了opencv库,所以需要提前安装好opencv。
二、自定义算子的实现
1,实现自定义算子函数
在解压后的libtorch文件夹统计目录,实现自定义算子,用opencv库实现的图像投射函数:warp_perspective。warp_perspective函数后面几行就是实现自定义算子的注册
warpPerspective.cpp文件:
#include "torch/script.h"
#include "opencv2/opencv.hpp"torch::Tensor warp_perspective(torch::Tensor image, torch::Tensor warp) {// BEGIN image_matcv::Mat image_mat(/*rows=*/image.size(0),/*cols=*/image.size(1),/*type=*/CV_32FC1,/*data=*/image.data_ptr<float>());// END image_mat// BEGIN warp_matcv::Mat warp_mat(/*rows=*/warp.size(0),/*cols=*/warp.size(1),/*type=*/CV_32FC1,/*data=*/warp.data_ptr<float>());// END warp_mat// BEGIN output_matcv::Mat output_mat;cv::warpPerspective(image_mat, output_mat, warp_mat, /*dsize=*/{ image.size(0),image.size(1) });// END output_mat// BEGIN output_tensortorch::Tensor output = torch::from_blob(output_mat.ptr<float>(), /*sizes=*/{ image.size(0),image.size(1) });return output.clone();// END output_tensor
}
//static auto registry = torch::RegisterOperators("my_ops::warp_perspective", &warp_perspective); // torch.__version__: 1.5.0torch.__version__ >= 1.6.0 torch/include/torch/library.h
TORCH_LIBRARY(my_ops, m) {m.def("warp_perspective", warp_perspective);
}2,同级目录创建CMakeList.txt文件
里面需要修改你自己的python下torch的路径,以及你对应安装python版pytorch是cpu还是gpu的。
cmake_minimum_required(VERSION 3.10 FATAL_ERROR)
project(warp_perspective)set(CMAKE_VERBOSE_MAKEFILE ON)
# >>> build type
set(CMAKE_BUILD_TYPE "Release") # 指定生成的版本
set(CMAKE_CXX_FLAGS_DEBUG "$ENV{CXXFLAGS} -O0 -Wall -g2 -ggdb")
set(CMAKE_CXX_FLAGS_RELEASE "$ENV{CXXFLAGS} -O3 -Wall")set(TORCH_ROOT "/home/xxx/anaconda3/lib/python3.10/site-packages/torch")
include_directories(${TORCH_ROOT}/include)
link_directories(${TORCH_ROOT}/lib/)# Opencv
find_package(OpenCV REQUIRED)# Define our library target
add_library(warp_perspective SHARED warpPerspective.cpp)# Enable C++14
target_compile_features(warp_perspective PRIVATE cxx_std_17)# libtorch库文件
target_link_libraries(warp_perspective # CPUc10 torch_cpu# GPU# c10_cuda # torch_cuda)# opencv库文件
target_link_libraries(warp_perspective${OpenCV_LIBS}
)add_definitions(-D _GLIBCXX_USE_CXX11_ABI=0)
3,编译生成库文件
同级目录创建build文件夹,进入build文件夹利用CMakeList.txt进行编译,生成libwarp_perspective.so库文件
mkdir build
cd build
cmake ..
make![]()
4,python版pytorch进行自定义算子的测试
注意我的以上代码都是放在了/data/xxx/mylib路径下,所以torch.ops.load_library("/data/xxx/mylib/build/libwarp_perspective.so")就找到库文件的位置。
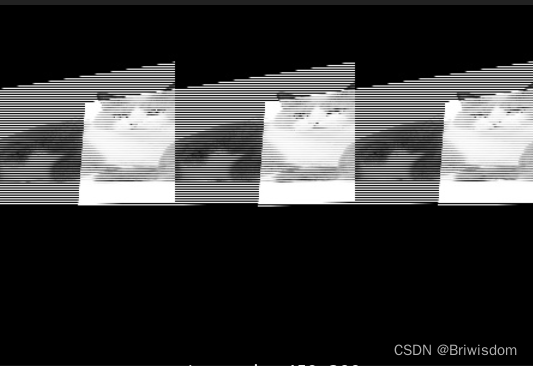
这里我随便找了一张图片,和直接用python版的opencv做投射变换的结果作为golden对比。如下分别是原图,golden, 自定义pytorch算子的输出。自定义算子的输出不太对,但是图像轮廓和投射效果是对的,后面有时间我再检查一下是什么原因。


测试代码:
import torch
import cv2
import numpy as nptorch.ops.load_library("/data/xxx/mylib/build/libwarp_perspective.so")im=cv2.imread("/data/xxx/mylib/cat.jpg",0)pst1 = np.float32([[56,65], [368,52], [28,387], [389,390]])
pst2 = np.float32([[100,145], [300,100], [80,290], [310,300]])
#2.2获取透视变换矩阵
T = cv2.getPerspectiveTransform(pst1, pst2)in_data =torch.from_numpy(np.float32(im))
in2_data = torch.Tensor(T)out1=torch.ops.my_ops.warp_perspective(in_data,in2_data)
dst0=np.uint8(out1.numpy())
cv2.imwrite("/data/xxx/mylib/cat_warp.jpg",dst0)dst = cv2.warpPerspective(im, np.float32(T), (im.shape[1], im.shape[0]))
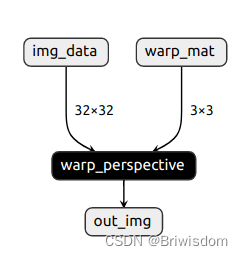
cv2.imwrite("/data/xxx/mylib/cat_warp_gold.jpg",dst)三、自定义算子导出为onnx文件
将注册的pytorch的自定义算子导出为onnx文件查看,效果图如下:
导出代码文件如下
import torch
import numpy as nptorch.ops.load_library("/data/xxx/mylib/build/libwarp_perspective.so")
class MyNet(torch.nn.Module):def __init__(self, name):super(MyNet, self).__init__()self.model_name = namedef forward(self, in_data, warp_data):return torch.ops.my_ops.warp_perspective(in_data, warp_data)def my_custom(g, in_data, warp_data):return g.op("cus_ops::warp_perspective", in_data, warp_data)
torch.onnx.register_custom_op_symbolic("my_ops::warp_perspective", my_custom, 9)if __name__ == "__main__":net = MyNet("my_ops")in_data = torch.randn((32, 32))warp_data = torch.rand((3, 3))out = net(in_data, warp_data)print("out: ", out)# export onnxtorch.onnx.export(net,(in_data, warp_data),"./my_ops_export_model2.onnx",input_names=["img_data", "warp_mat"],output_names=["out_img"],custom_opsets={"cus_ops": 11},)相关文章:
记录pytorch实现自定义算子并转onnx文件输出
概览:记录了如何自定义一个算子,实现pytorch注册,通过C编译为库文件供python端调用,并转为onnx文件输出 整体大概流程: 定义算子实现为torch的C版本文件注册算子编译算子生成库文件调用自定义算子 一、编译环境准备…...
ARPG----C++学习记录04 Section8 角色类,移动
角色类输入 新建一个角色C,继承建立蓝图,和Pawn一样,绑定输入移动和相机. 在构造函数中添加这段代码也能实现。打开UsePawnControlRotation就可以让人物不跟随鼠标旋转 得到旋转后的向前向量 使用旋转矩阵 想要前进方向和旋转的方向对应。获取当前控制…...
拆解软件定义汽车:OS突围
软件作为智能汽车的核心组成部分,由于自身较为独立和复杂的IT学科体系,其技术链路、产业分工、价值分配、商业模式相对硬件产品(如域控、激光雷达、摄像头等硬件)而言,在汽车产业内探讨和传播相对较少。 11月3日&…...
)
并发线程使用介绍(二)
2.2.6 线程的强占 Thread的非静态方法join方法 需要在某一个线程下去调用这个方法 如果在main线程中调用了t1.join(),那么main线程会进入到等待状态,需要等待t1线程全部执行完毕,在恢复到就绪状态等待 CPU调度。 如果在main线程中调用了t1.j…...
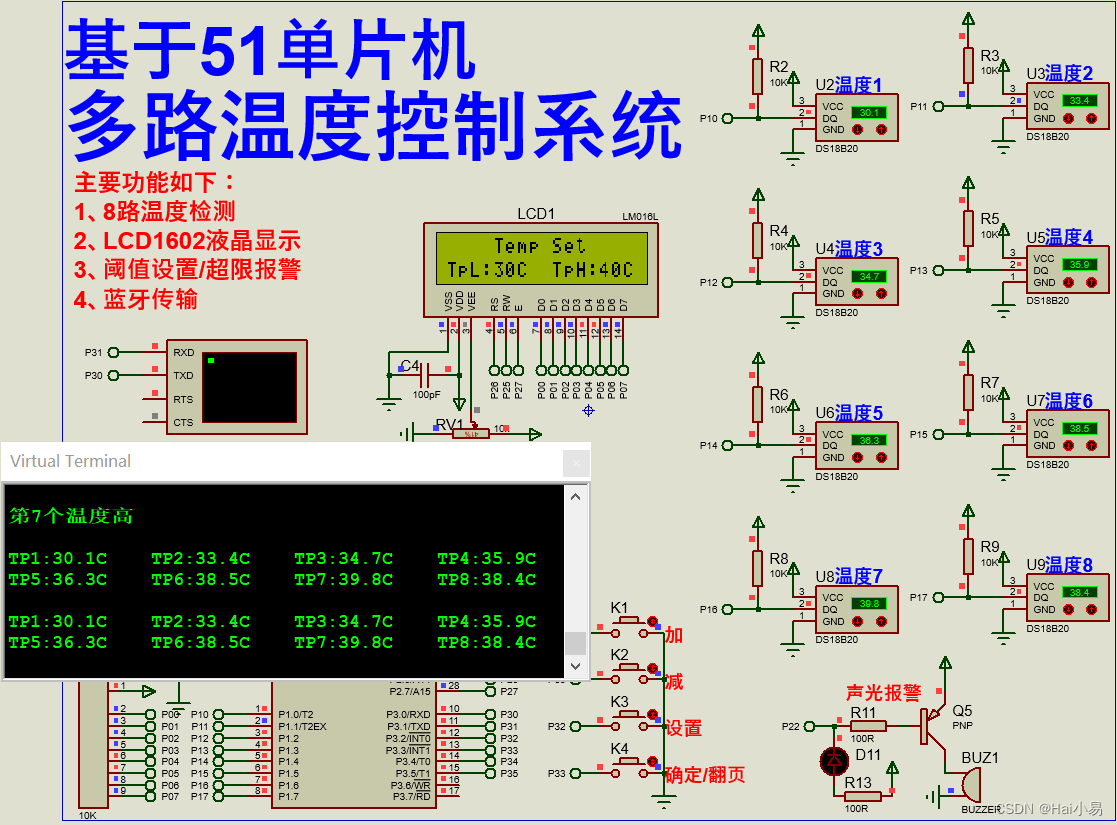
【Proteus仿真】【51单片机】多路温度控制系统
文章目录 一、功能简介二、软件设计三、实验现象联系作者 一、功能简介 本项目使用Proteus8仿真51单片机控制器,使用按键、LED、蜂鸣器、LCD1602、DS18B20温度传感器、HC05蓝牙模块等。 主要功能: 系统运行后,默认LCD1602显示前4路采集的温…...
一些可以参考的文档集合15
之前的文章集合: 一些可以参考文章集合1_xuejianxinokok的博客-CSDN博客 一些可以参考文章集合2_xuejianxinokok的博客-CSDN博客 一些可以参考的文档集合3_xuejianxinokok的博客-CSDN博客 一些可以参考的文档集合4_xuejianxinokok的博客-CSDN博客 一些可以参考的文档集合5…...

k8s的service自动发现服务:实战版
Service服务发现的必要性: 对于kubernetes整个集群来说,Pod的地址也可变的,也就是说如果一个Pod因为某些原因退出了,而由于其设置了副本数replicas大于1,那么该Pod就会在集群的任意节点重新启动,这个重新启动的Pod的I…...

项目笔记记录
一、node下载版本报错:npm install --legacy-peer-deps 二、Scheduled: 任务自动化调度 Scheduled 标记要调度的方法的注解,必须指定 cron,fixedDelay或fixedRate属性之一 fixedDelay:固定延迟 延迟执行任务,任务在…...

【leetcode】1137. 第 N 个泰波那契数
题目 泰波那契序列 Tn 定义如下: T0 0, T1 1, T2 1, 且在 n > 0 的条件下 Tn3 Tn Tn1 Tn2 给你整数 n,请返回第 n 个泰波那契数 Tn 的值。 示例 1: 输入:n 4 输出:4 解释: T_3 0 1 1 2 …...

【解决】conda-script.py: error: argument COMMAND: invalid choice: ‘activate‘
运行conda activate base报错: 试了网上找到的解决方法都不行: 最后切换了一下terminal: 从powershell改回cmd(不知道为什么一开始手贱换成powershell) 就可以了...
Linux 性能调优之硬件资源监控
写在前面 考试整理相关笔记博文内容涉及 Linux 硬件资源监控常见的命名介绍,涉及硬件基本信息查看查看硬件错误信息查看虚拟环境和云环境资源理解不足小伙伴帮忙指正 对每个人而言,真正的职责只有一个:找到自我。然后在心中坚守其一生&#x…...
Windows系统隐藏窗口启动控制台程序
背景 上线项目有时候需要一些控制台应用作为辅助服务来协助UI应用满足实际需求,这时候如果一运行UI就冒出一系列的黑框,这将会导致客户被下的不起,生怕中了什么不知名病毒 方案 可以使用vbs来启动,这个是window系统自带的&#…...

FreeSWITCH fail2ban.lua
--[[ 部署:在vars.xml里面增加配置项目:<X-PRE-PROCESS cmd"set" data"api_on_startupluarun fail2ban.lua"/>或者在 lua.conf.xml 里面增加下面这个配置项目:<param name"startup-script" value"fail2ban.…...

Qt HTTP下载数据
添加头文件: #include <QNetworkAccessManager> #include <QNetworkReply> #include <QUrl> #include <QDesktopServices> 创建对象: QNetworkAccessManager networkManager;//网络管理QNetworkReply *reply; …...

8. 深度学习——NLP
机器学习面试题汇总与解析——NLP 本章讲解知识点 什么是 NLP循环神经网络(RNN)RNN 变体Attention 机制RNN 反向传播推导LSTM 与 GRUTransformerBertGPT分词算法分类CBOW 模型与 Skip-Gram 模型本专栏适合于Python已经入门的学生或人士,有一定的编程基础。本专栏适合于算法…...
部署 KVM 虚拟化平台
虚拟化技术的演变过程分为软件模拟、虚拟化层翻译、容器虚拟化三个阶段 1 软件模拟的技术方式 软件模拟是通过软件完全模拟CPU、网卡、芯片组、磁盘等计算机硬件,因为是软件模拟,所以理论上可以模拟任何硬件,甚至不存在的硬件。但是由于是软…...
Juniper PPPOE双线路冗余RPM配置
------------------ 浮动静态路由 set routing-options static route 0.0.0.0/0 next-hop pp0.0 qualified-next-hop pp0.1 preference 10 ----------------- RPM测试的内容,包括从哪个接口发起测试,测试ping等等 #指定探针类型用ICMP请求 #探测的目标地址 #探测间隔 #探测阈…...

原生JS实现视频截图
视频截图效果预览 利用Canvas进行截图 要用原生js实现视频截图,可以利用canvas的绘图功能 ctx.drawImage,只需要获取到视频标签,就可以通过drawImage把视频当前帧图像绘制在canvas画布上。 const video document.querySelector(video) con…...

前端Rust二进制/wasm全平台构建流程简述
前言 开门见山,现代前端 Rust 构建基本分三大类,即 构建 .wasm 、构建 .node 二进制 、构建 swc 插件。 入门详见 《 前端Rust开发WebAssembly与Swc插件快速入门 》 。 对于单独开发某一类的流程,在上述参考文章中已有介绍,但对于…...
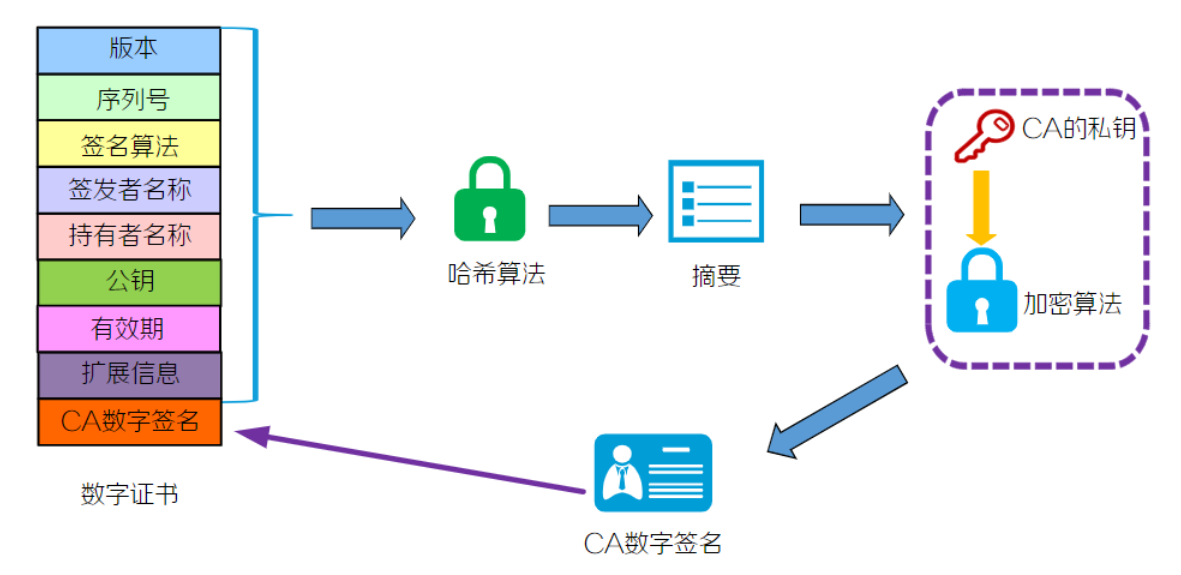
加解密算法相关技术详解
文章目录 简介工作机制加解密对称密钥算法非对称密钥算法 数字信封数字签名数字证书技术对比 推荐阅读 简介 随着网络技术的飞速发展,网络安全问题日益重要,加解密技术是网络安全技术中的核心技术,是最常用的安全保密手段。 加密࿱…...
)
用Python+OpenCV手把手实现Prewitt边缘检测(附完整代码与效果对比图)
用PythonOpenCV手把手实现Prewitt边缘检测(附完整代码与效果对比图) 边缘检测是计算机视觉中最基础也最关键的预处理步骤之一。想象一下,当你需要让计算机"看清"一张照片中的物体轮廓时,边缘检测算法就是它的"视觉…...

如何用SMUDebugTool彻底掌控你的AMD Ryzen处理器性能调优
如何用SMUDebugTool彻底掌控你的AMD Ryzen处理器性能调优 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: https://gitcode.co…...

WPF虚拟桌宠组件:可嵌入、高性能、工程化UI生命体
1. 这不是“桌面宠物”,而是一个可嵌入的WPF UI组件化生命体你可能在Windows XP时代见过那只晃着尾巴、偶尔打哈欠的3D小猫,也可能在Win10系统托盘里点开过一个会眨眼的像素狐狸——但那些是独立进程、是系统级小工具、是“看一眼就关掉”的轻量娱乐。而…...
损坏诊断全解)
半导体元件(二极管/三极管/MOS管/IC)损坏诊断全解
半导体元件(二极管、三极管、MOS 管、集成电路)是 PCB 的核心功能单元,对过压、过流、ESD、高温极度敏感,损坏后直接导致电路功能失效、短路烧板。很多工程师维修时盲目更换芯片,不仅成本高,还易误判。一…...

从RD、CS到WK:一文讲透SAR主流成像算法的演进与选型实战
从RD、CS到WK:SAR成像算法选型实战指南 当无人机掠过灾区上空,或卫星扫描地球表面时,合成孔径雷达(SAR)正通过电磁波穿透云层和黑暗,将地面信息转化为高分辨率图像。而决定图像质量的关键,在于工…...

如何快速解锁艾尔登法环帧率限制:终极性能优化指南
如何快速解锁艾尔登法环帧率限制:终极性能优化指南 【免费下载链接】EldenRingFpsUnlockAndMore A small utility to remove frame rate limit, change FOV, add widescreen support and more for Elden Ring 项目地址: https://gitcode.com/gh_mirrors/el/EldenR…...

ComfyUI-Manager完整指南:如何轻松管理你的AI工作流扩展库
ComfyUI-Manager完整指南:如何轻松管理你的AI工作流扩展库 【免费下载链接】ComfyUI-Manager ComfyUI-Manager is an extension designed to enhance the usability of ComfyUI. It offers management functions to install, remove, disable, and enable various c…...
)
【2025】AWVS安装保姆级教程(最新25.1.2可用)
【2025】AWVS安装保姆级教程(最新25.1.2可用) 文章目录 工具下载Host 重定向AWVS安装AWVS查看安装失败原因 工具下载 点击下载即可 下载完的工具后缀格式为.apk,需要将其改为.zip,然后将其解压得到以下工具后续安装使用 Host 重…...
)
DeepSeek代码风格检查避坑指南(内部审计报告首次披露:37个被忽略的合规红线)
更多请点击: https://intelliparadigm.com 第一章:DeepSeek代码风格检查的合规性本质与审计背景 DeepSeek代码风格检查并非单纯的技术偏好约束,而是嵌入研发治理链条中的合规性控制节点。其本质是将编程实践与组织级安全策略、行业监管要求&…...
)
CentOS 8.5最小化安装后,这5个必做的安全与效率优化设置(附一键脚本)
CentOS 8.5最小化安装后的5个必做安全与效率优化刚完成CentOS 8.5最小化安装的系统就像一张白纸——干净但缺乏生产力。作为运维老手,我见过太多人跳过基础优化直接部署应用,结果在后续使用中频繁遇到权限混乱、软件安装慢、SSH爆破等问题。本文将分享我…...