竞赛选题 深度学习的视频多目标跟踪实现
文章目录
- 1 前言
- 2 先上成果
- 3 多目标跟踪的两种方法
- 3.1 方法1
- 3.2 方法2
- 4 Tracking By Detecting的跟踪过程
- 4.1 存在的问题
- 4.2 基于轨迹预测的跟踪方式
- 5 训练代码
- 6 最后
1 前言
🔥 优质竞赛项目系列,今天要分享的是
基于深度学习的视频多目标跟踪实现
该项目较为新颖,适合作为竞赛课题方向,学长非常推荐!
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
2 先上成果

3 多目标跟踪的两种方法
3.1 方法1
基于初始化帧的跟踪,在视频第一帧中选择你的目标,之后交给跟踪算法去实现目标的跟踪。这种方式基本上只能跟踪你第一帧选中的目标,如果后续帧中出现了新的物体目标,算法是跟踪不到的。这种方式的优点是速度相对较快。缺点很明显,不能跟踪新出现的目标。
3.2 方法2
基于目标检测的跟踪,在视频每帧中先检测出来所有感兴趣的目标物体,然后将其与前一帧中检测出来的目标进行关联来实现跟踪的效果。这种方式的优点是可以在整个视频中跟踪随时出现的新目标,当然这种方式要求你前提得有一个好的“目标检测”算法。
学长主要分享Option2的实现原理,也就是Tracking By Detecting的跟踪方式。
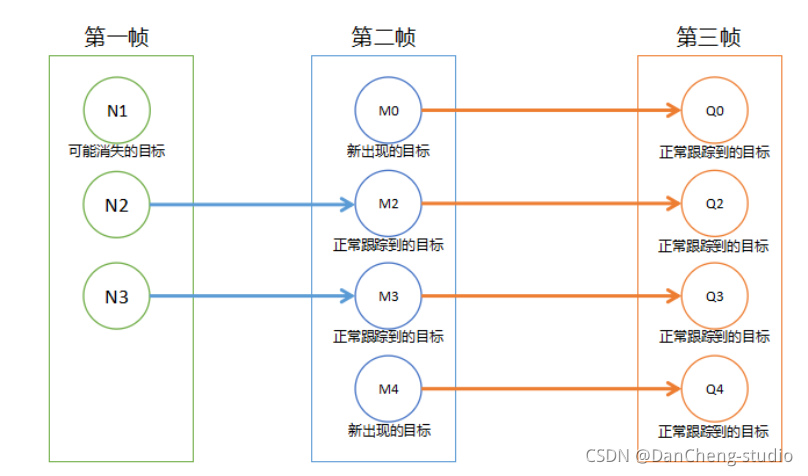
4 Tracking By Detecting的跟踪过程
**Step1:**使用目标检测算法将每帧中感兴趣的目标检测出来,得到对应的(位置坐标, 分类, 可信度),假设检测到的目标数量为M;
**Step2:**通过某种方式将Step1中的检测结果与上一帧中的检测目标(假设上一帧检测目标数量为N)一一关联起来。换句话说,就是在M*N个Pair中找出最像似的Pair。
对于Step2中的“某种方式”,其实有多种方式可以实现目标的关联,比如常见的计算两帧中两个目标之间的欧几里得距离(平面两点之间的直线距离),距离最短就认为是同一个目标,然后通过匈牙利算法找出最匹配的Pair。当让,你还可以加上其他的判断条件,比如我用到的IOU,计算两个目标Box(位置大小方框)的交并比,该值越接近1就代表是同一个目标。还有其他的比如判断两个目标的外观是否相似,这就需要用到一种外观模型去做比较了,可能耗时更长。
在关联的过程中,会出现三种情况:
1)在上一帧中的N个目标中找到了本次检测到的目标,说明正常跟踪到了;
2)在上一帧中的N个目标中没有找到本次检测到的目标,说明这个目标是这一帧中新出现的,所以我们需要把它记录下来,用于下下一次的跟踪关联;
3)在上一帧中存在某个目标,这一帧中并没有与之关联的目标,那么说明该目标可能从视野中消失了,我们需要将其移除。(注意这里的可能,因为有可能由于检测误差,在这一帧中该目标并没有被检测到)
4.1 存在的问题
上面提到的跟踪方法在正常情况下都能够很好的工作,但是如果视频中目标运动得很快,前后两帧中同一个目标运动的距离很远,那么这种跟踪方式就会出现问题。
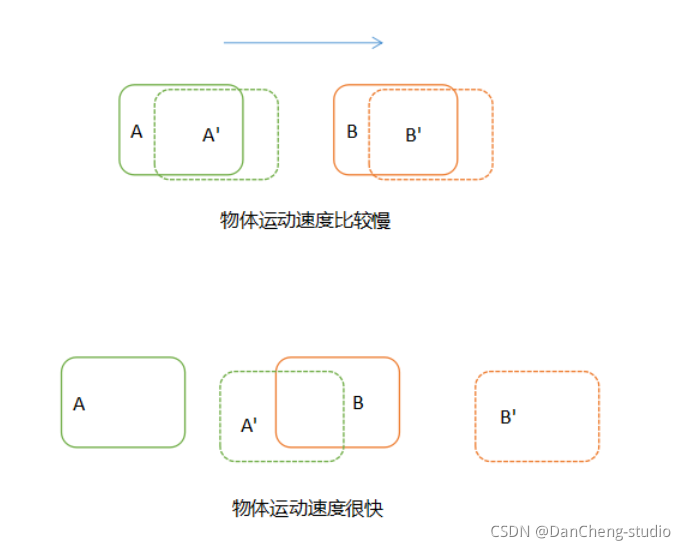
如上图,实线框表示目标在第一帧的位置,虚线框表示目标在第二帧的位置。当目标运行速度比较慢的时候,通过之前的跟踪方式可以很准确的关联(A, A’)和(B,
B’)。但是当目标运行速度很快(或者隔帧检测)时,在第二帧中,A就会运动到第一帧中B的位置,而B则运动到其他位置。这个时候使用上面的关联方法就会得到错误的结果。
那么怎样才能更加准确地进行跟踪呢?
4.2 基于轨迹预测的跟踪方式
既然通过第二帧的位置与第一帧的位置进行对比关联会出现误差,那么我们可以想办法在对比之前,先预测目标的下一帧会出现的位置,然后与该预测的位置来进行对比关联。这样的话,只要预测足够精确,那么几乎不会出现前面提到的由于速度太快而存在的误差

如上图,我们在对比关联之前,先预测出A和B在下一帧中的位置,然后再使用实际的检测位置与预测的位置进行对比关联,可以完美地解决上面提到的问题。理论上,不管目标速度多么快,都能关联上。那么问题来了,怎么预测目标在下一帧的位置?
方法有很多,可以使用卡尔曼滤波来根据目标前面几帧的轨迹来预测它下一帧的位置,还可以使用自己拟合出来的函数来预测下一帧的位置。实际过程中,我是使用拟合函数来预测目标在下一帧中的位置。
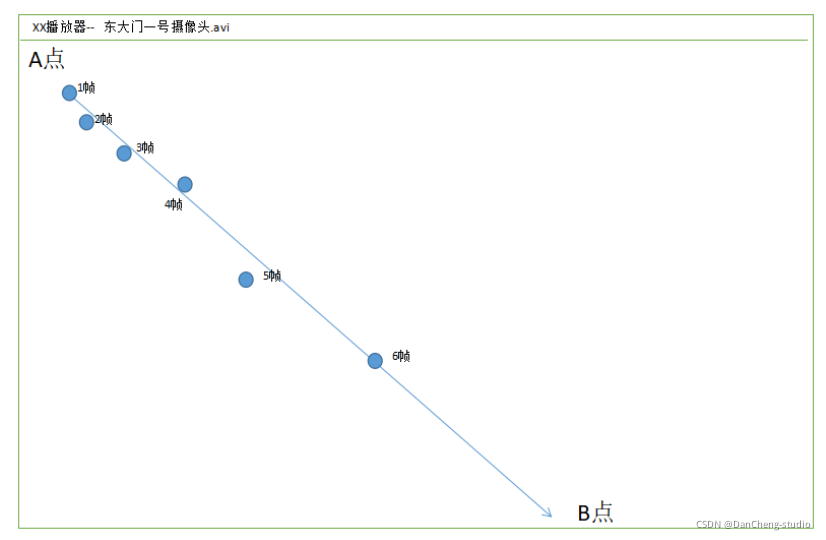
如上图,通过前面6帧的位置,我可以拟合出来一条(T->XY)的曲线(注意不是图中的直线),然后预测目标在T+1帧的位置。具体实现很简单,Python中的numpy库中有类似功能的方法。
5 训练代码
这里记录一下训练代码,来日更新
if FLAGS.mode == 'eager_tf':# Eager mode is great for debugging# Non eager graph mode is recommended for real trainingavg_loss = tf.keras.metrics.Mean('loss', dtype=tf.float32)avg_val_loss = tf.keras.metrics.Mean('val_loss', dtype=tf.float32)for epoch in range(1, FLAGS.epochs + 1):for batch, (images, labels) in enumerate(train_dataset):with tf.GradientTape() as tape:outputs = model(images, training=True)regularization_loss = tf.reduce_sum(model.losses)pred_loss = []for output, label, loss_fn in zip(outputs, labels, loss):pred_loss.append(loss_fn(label, output))total_loss = tf.reduce_sum(pred_loss) + regularization_lossgrads = tape.gradient(total_loss, model.trainable_variables)optimizer.apply_gradients(zip(grads, model.trainable_variables))logging.info("{}_train_{}, {}, {}".format(epoch, batch, total_loss.numpy(),list(map(lambda x: np.sum(x.numpy()), pred_loss))))avg_loss.update_state(total_loss)for batch, (images, labels) in enumerate(val_dataset):outputs = model(images)regularization_loss = tf.reduce_sum(model.losses)pred_loss = []for output, label, loss_fn in zip(outputs, labels, loss):pred_loss.append(loss_fn(label, output))total_loss = tf.reduce_sum(pred_loss) + regularization_losslogging.info("{}_val_{}, {}, {}".format(epoch, batch, total_loss.numpy(),list(map(lambda x: np.sum(x.numpy()), pred_loss))))avg_val_loss.update_state(total_loss)logging.info("{}, train: {}, val: {}".format(epoch,avg_loss.result().numpy(),avg_val_loss.result().numpy()))avg_loss.reset_states()avg_val_loss.reset_states()model.save_weights('checkpoints/yolov3_train_{}.tf'.format(epoch))
6 最后
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
相关文章:
竞赛选题 深度学习的视频多目标跟踪实现
文章目录 1 前言2 先上成果3 多目标跟踪的两种方法3.1 方法13.2 方法2 4 Tracking By Detecting的跟踪过程4.1 存在的问题4.2 基于轨迹预测的跟踪方式 5 训练代码6 最后 1 前言 🔥 优质竞赛项目系列,今天要分享的是 基于深度学习的视频多目标跟踪实现 …...
金蝶云星空表单插件获取控件值
文章目录 金蝶云星空表单插件获取控件值获取主键获取文本获取日期获取数值获取基础资料 金蝶云星空表单插件获取控件值 获取主键 正确: this.View.Model.GetPKValue();错误: 获取文本 this.View.Model.GetValue("FBILLNO")获取日期 thi…...

docker自启与容器自启
天行健,君子以自强不息;地势坤,君子以厚德载物。 每个人都有惰性,但不断学习是好好生活的根本,共勉! 文章均为学习整理笔记,分享记录为主,如有错误请指正,共同学习进步。…...
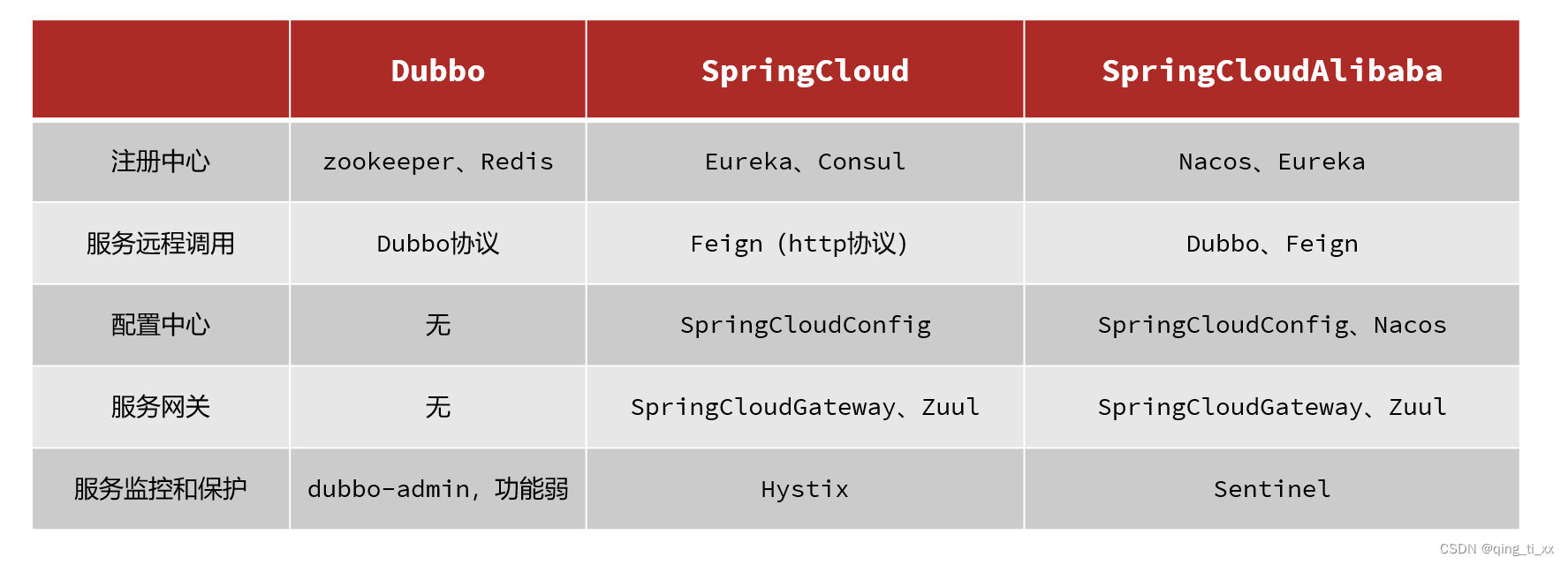
一、认识微服务
目录 一、单体架构 二、分布式架构 三、微服务 1、微服务架构特征: 1.单一职责: 2.面向服务: 3.自治: 4.隔离性强: 2、微服务结构: 3、微服务技术对比: 一、单体架构 二、分布式架构 三…...

Windows server 2012 R2系统服务器远程桌面服务激活服务器RD授权分享
Windows server 2012 R2系统服务器远程桌面服务激活服务器RD授权 二、激活服务器,获取许可证服务器ID和许可证密钥包ID三、激活终端服务器四、配置远程桌面会话主机授权服务器 上期我分享了Windows server 2012 R2系统服务器远程桌面服务的安装教程,若是…...

Vue的计算属性:让你的代码更简洁高效
Vue.js是一种流行的JavaScript框架,它提供了许多功能来帮助开发人员构建交互式Web应用程序。其中一个非常有用的功能是计算属性。在本文中,我们将讨论什么是Vue的计算属性以及如何使用它们来编写更简洁高效的代码。 什么是Vue的计算属性? Vu…...

mysql主从复制-使用心得
文章目录 前言环境配置主库从库 STATEMENTbinloggtidlog-errorDistSQL总结 前言 mysql 主从复制使用感受,遇到一些问题的整理,也总结了一些排查问题技巧。 环境 mysql5.7 配置 附:千万级数据快速插入配置可以参考:mysql千万数…...

今年副业比主业赚得多...
我是从20年开始接触副业的,主要是在程序员外包平台上接单。从一开始的月入0到几百,到现在每个月稳定有小一万的收入。这个月接了一个比较大的项目,结款之后发现今年的副业已经比主业赚得多了,简直美滋滋~ 今年主业收入8wÿ…...

debian12安装fail2ban
趁着阿里云活动,买了一台一年99的VPS,装了debian12 rootdebian:~# neofetch _,met$$$$$gg. …...
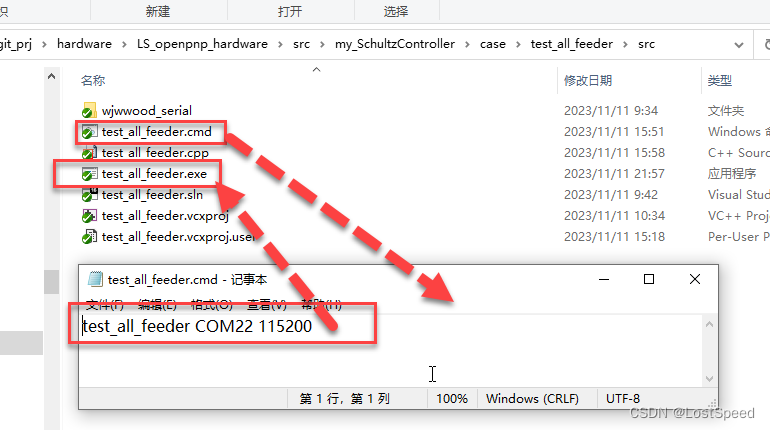
openpnp - 74路西门子飞达控制板(主控板STM32_NUCLEO-144) - 验证
文章目录 openpnp - 74路西门子飞达控制板(主控板STM32_NUCLEO-144) - 验证概述笔记重复数字IO的问题想法手工实现程序实现确定要摘掉的数字重合线自动化测试的问题测试程序的场景测试程序的运行效果测试程序实现备注END openpnp - 74路西门子飞达控制板(主控板STM32_NUCLEO-14…...

从房地产先后跨界通信、文旅演艺领域,万通发展未来路在何方?
近年来,房地产市场可谓负重前行,各大房企纷纷谋求新出路。 作为中国最早的房企之一,万通发展再次处在转型变革的十字路口。自去年以来,万通发展在转型升级之路上动作频频,可谓忙得不亦乐乎。 大幕落下之时,…...

LLM 中的参数单位
M (Mega) 相比于 Million: 1M (Mega) 在计算机科学中等于 ( 2^{20} )(即 1,048,576)字节。1 Million 等于 ( 10^6 )(即 1,000,000)。因此,1M (Mega) 在数字上略小于 1 Million。 G (Giga) 相比于 Billion&…...

【探索Linux】—— 强大的命令行工具 P.15(进程间通信 —— system V共享内存)
阅读导航 引言一、system V的概念二、共享内存(1) 概念(2) 共享内存示意图(3) 共享内存数据结构 三、共享内存的使用1. 共享内存的使用步骤(1)包含头文件(2)获取键值(ftok函数)(3)创…...
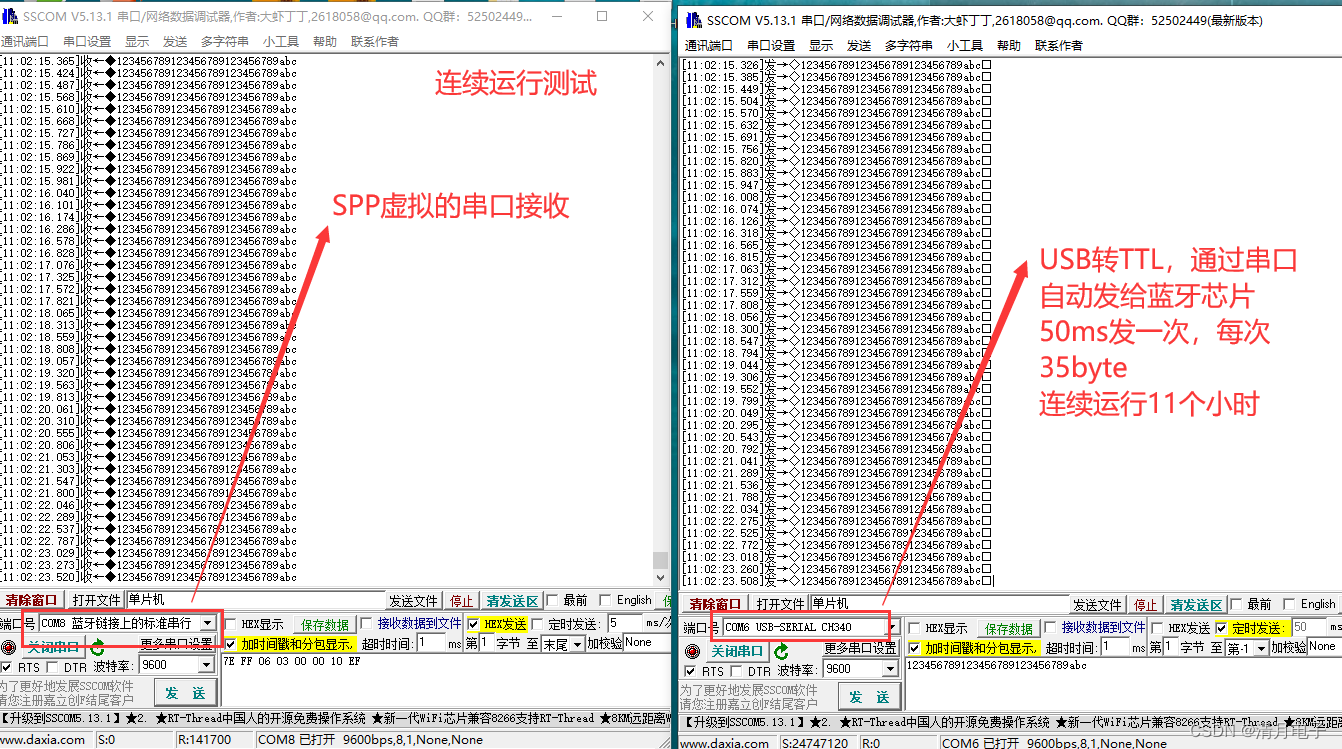
MCU通过KT6368A用SPP透传发送1K左右的数据,手机APP显示是3个包或者4个包,但是我看手册说最大一个包是512,理论应该是两个包吧,请问这正常吗?
一、问题简介 MCU通过KT6368A用SPP透传发送1K左右的数据,手机APP显示是3个包或者4个包,但是我看手册说最大一个包是512,理论应该是两个包吧,请问这正常吗? 详细说明 实际测试的截图如下:使用的是安卓app…...

童装CPC认证检测哪些内容?童装上架亚马逊美国站CPC认证办理
童装是指适合儿童穿着的服装。按年龄分,包括婴儿服装、儿童服装、童装、中年童装、大童服装。CPC认证即儿童产品证书(CPC),主要针对12岁以下的儿童,如玩具、摇篮、童装等。跨境卖家作为“进口商”,想要将中…...
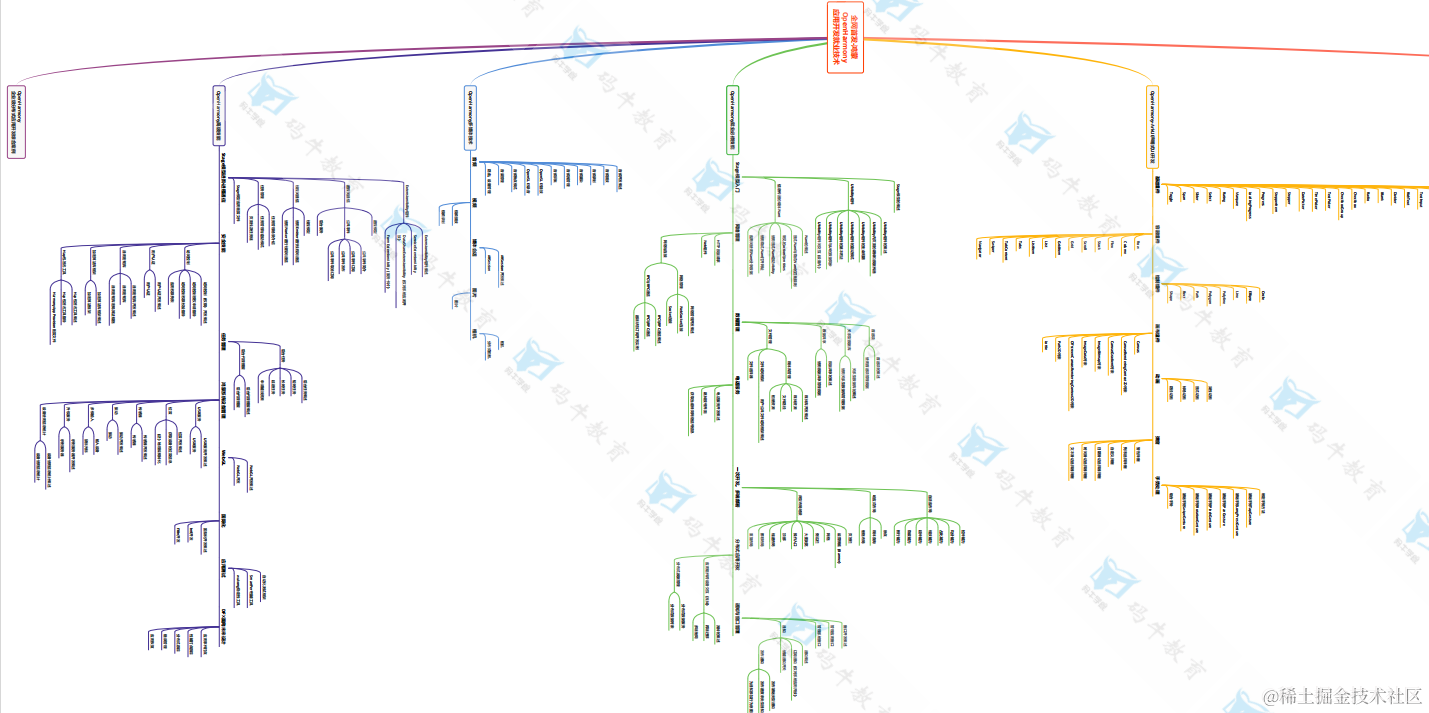
2023鸿蒙预定未来,环境搭建学习
鸿蒙开发基础知识 鸿蒙的基本概念和特点 鸿蒙(HarmonyOS)是华为公司开发的一款全场景分布式操作系统。它的设计目标是为各种设备提供统一的、无缝的用户体验。鸿蒙的核心特点包括以下几个方面: 分布式架构:鸿蒙采用分布式架构&…...
技术架构 - 应用数据分离,应用服务集群架构
前言 上一篇文章介绍了单机架构,由于性能瓶颈,满足不了高访问量,所以演化出了数据分离架构。 这种架构也很简单只是将应用服务和数据库服务分离开来,避免单一架构的资源争夺的情况。 一、 应用数据分离架构 1. 简介 应用服务和…...
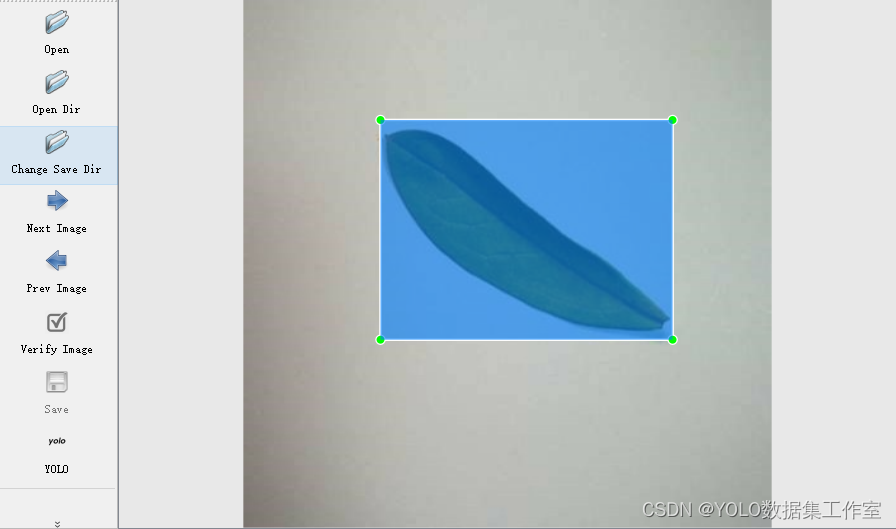
YOLO目标检测——树叶检测数据集下载分享【含对应voc、coco和yolo三种格式标签】
实际项目应用:生物多样性研究、林业管理、环境监测和教育科研等方面数据集说明:树叶分类检测数据,真实场景的高质量图片数据,数据场景丰富,总共十个类别。标签说明:使用lableimg标注软件标注,标…...
ubuntu 20通过docker安装onlyoffice,并配置https访问
目录 一、安装docker (一)更新包列表和安装依赖项 (二)添加Docker的官方GPG密钥 (三)添加Docker存储库 (四)安装Docker (五)启动Docker服务并设置它随系…...
Vue 模板语法 v-bind
红色框里面的都是vue的模板。有了模板就得有模板的特殊语法。上面只是简单的双括号加上表达式,这种叫做插值语法,除了这种语法还有其他语法吗? 插值语法实现的功能很单一,就是将指定的值放到指定的位置。还有一种叫做指令语法&am…...

Ventoy终极指南:一个U盘启动所有系统,告别重复格式化烦恼 [特殊字符]
Ventoy终极指南:一个U盘启动所有系统,告别重复格式化烦恼 😎 【免费下载链接】Ventoy A new bootable USB solution. 项目地址: https://gitcode.com/GitHub_Trending/ve/Ventoy 还在为每次安装系统都要重新制作启动盘而烦恼吗&#x…...

浏览器 Profile 环境排查:Cookie、LocalStorage、网络出口与自动化任务配置清单
一、为什么浏览器环境经常“今天能用,明天失效”很多团队遇到登录状态丢失、页面配置异常、自动化任务失败时,会先怀疑网络、脚本或系统本身。但在实际项目里,问题经常不是单点故障,而是浏览器环境缺少稳定管理:对象常…...

内存占用3KB!极致瘦身释放MCU无限可能
极致小体积,给工业领域带来了无限的可能:更低硬件成本,更小芯片体积,更低功耗,更高可靠性,让每一颗小MCU都拥有大系统的完整能力。 https://www.bilibili.com/video/BV1eZLi6PEjc/?spm_id_from333.1387.ho…...

基于MAX78000的离线鸟类声音识别:边缘AI从数据到部署全流程解析
1. 项目概述:当边缘AI“听懂”鸟鸣在野外生态监测或自家后院观鸟时,你是否有过这样的经历:听到一阵清脆或婉转的鸟鸣,却完全不知道是哪位“歌唱家”在表演?传统的鸟类识别依赖专家经验和图鉴比对,不仅门槛高…...

告别手动复制!用这个自定义编辑器脚本一键备份/克隆Unity Terrain Data
告别手动复制!用这个自定义编辑器脚本一键备份/克隆Unity Terrain Data在Unity关卡设计和技术美术的工作流中,地形数据的灵活复用往往意味着反复的手动操作——导出高度图、备份材质参数、复制植被分布,每个环节都可能成为效率瓶颈。想象这样…...

模拟电路实现自主循线机器人:无MCU的硬件逻辑设计
1. 项目概述:用最纯粹的模拟电路,造一台会“思考”的机器人每次看到那些在赛道上灵巧穿梭的循线小车,你是不是也手痒,想自己动手做一个?但一听到“单片机”、“编程”、“Arduino”这些词,又觉得门槛太高&a…...

Java网络编程基础分享
在学习 Java 的过程中,网络编程是非常重要的一环。无论是后端开发、分布式系统、即时通讯、文件传输,还是游戏服务、物联网设备,都离不开网络通信一、计算机网络基础1.1 什么是计算机网络把不同地理位置、具有独立功能的计算机,通…...

京东自动购物终极指南:告别缺货烦恼,智能抢购神器
京东自动购物终极指南:告别缺货烦恼,智能抢购神器 【免费下载链接】Jd-Auto-Shopping 京东商品补货监控及自动下单 项目地址: https://gitcode.com/gh_mirrors/jd/Jd-Auto-Shopping 还在为心仪商品瞬间售罄而苦恼吗?还在熬夜等待补货却…...

LeagueAkari:基于LCU接口的英雄联盟客户端自动化工具深度解析
LeagueAkari:基于LCU接口的英雄联盟客户端自动化工具深度解析 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit 功能模块架构与核心技…...

2026上海GEO生成式引擎优化服务商综合实力测评:谁在真正帮品牌进入AI答案
当企业在讨论“上海生成式引擎优化公司哪家好”时,这个问题本身就反映了市场一个关键的转折。两三年前,企业营销的主战场还是搜索引擎排名和官网访问量。现在,决策者开始频繁向DeepSeek、豆包、通义千问等AI工具提问,而这些生成式…...