openpnp - 74路西门子飞达控制板(主控板STM32_NUCLEO-144) - 验证
文章目录
- openpnp - 74路西门子飞达控制板(主控板STM32_NUCLEO-144) - 验证
- 概述
- 笔记
- 重复数字IO的问题
- 想法
- 手工实现
- 程序实现
- 确定要摘掉的数字重合线
- 自动化测试的问题
- 测试程序的场景
- 测试程序的运行效果
- 测试程序实现
- 备注
- END
openpnp - 74路西门子飞达控制板(主控板STM32_NUCLEO-144) - 验证
概述
飞达程序编写的笔记(openpnp - 74路西门子飞达控制板(主控板STM32_NUCLEO-144)实现)没写完, 博客编辑时, 卡的厉害, 在这个笔记中继续写.
主要是设备挂满飞达场景下的测试, 确实测试出一些问题, 并加以解决.
笔记
重复数字IO的问题
将飞达全部挂上, 测试时, 发现有的飞达通讯卡顿. 好多次才会偶尔通讯成功一次.
看串口调试日志, 发现中间步骤的回包不对.
因为我单独测试(设备上只挂一个飞达, 插入每个航插端子, 进行各种命令的测试)是好的, 通讯质量刚刚的.
开始以为是西门子二手飞达有问题, 但是单独测试又是好的.
后来发现是主控板STM32_NUCLEO-144板子上, 有一些数字IO是连在一起的. 导致飞达都挂上时, 通过一个数字IO通讯, 实际上是由多个飞达同时回包的, 导致回包数据被冲乱.
现在已经发现有2个数字IO是这样的.
官方图纸如果一个IO一个IO的看, 中间有跳线, 不容易看. 主要不是自己画的, 看起来太费劲.
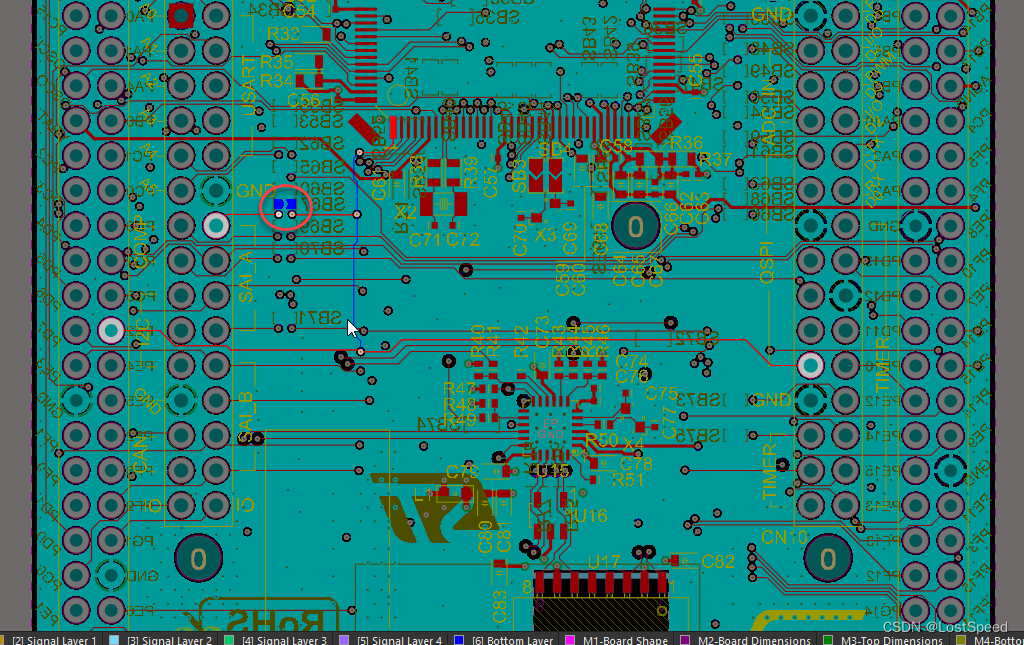
想个办法, 将一个数字IO号码联通多个数字IO端子的情况排查出来. 重复的数字IO端子就留一个接上飞达.
想法
写个测试程序吧
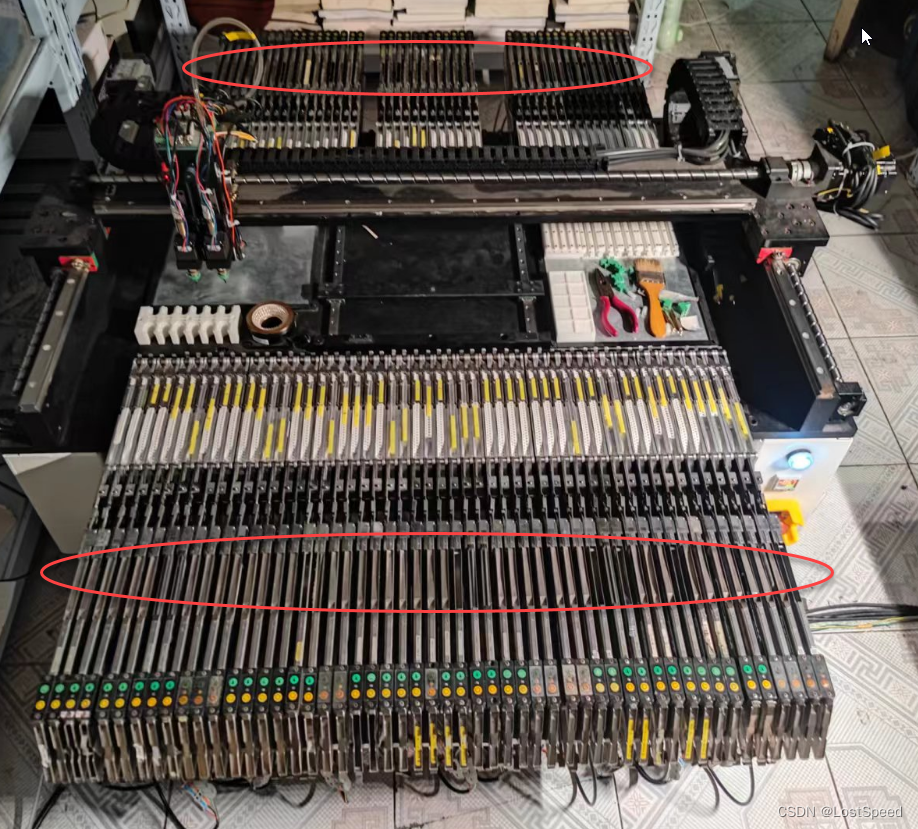
硬件方面, 将飞达都取下来.
逻辑如下:
- 先将所有数字IO设置为内部上拉, 这样读取时, 默认就是H
- 再将一个数字IO设置为L, 去读剩下所有的数字IO, 如果哪个为L, 就说明这2个数字IO是在硬件电路上连在一起的.
- 将所有数字IO都过一遍, 就知道所有重复数字IO.
- 然后在重复的数字IO上, 只挂一个飞达, 就可以解决这个问题.
手工实现
如果想确认一个飞达确实只有一个数字IO来控制, 是非常麻烦的, 非人力所能为.
用手工找出2对.
测试前, 先将飞达都挂上, 给第一个飞达发命令, 必须有快速流畅的回答.连续实验10次. 如果发现回包时有时无, 而且看到串口调试日志上有回包msglen长度不对的提示, 那就有可能是多个飞达被主板连在一起, 一个数字IO可以控制多个飞达.
然后将该飞达摘掉.
再给该飞达的数字IO发同样的命令, 如果有回答, 那就说明这个数字IO上有多余一把的飞达.
摘掉剩下的一把飞达, 再发包给同样的数字IO, 看有没有回包, 如果没有回包了, 那么最后摘掉的那个飞达所在的数字IO, 就在主板上和当前测试的这个数字IO连在一起了.
如果找到了疑似的重合的数字IO, 再将最后拔掉的飞达插上, 如果有回包了, 那就找到了.
这好麻烦, 如果是2个以上的数字IO重合了, 那可咋整?
必须写测试程序来干这事啊.
程序实现
花了1个小时, 写好了测试程序. 跑了一下, 花了3秒钟.
居然找到5对数字IO重合.
我开始手工找到的那2对数字IO重合的线, 就在程序找出的这5对线之中.
还好写程序找到了, 否则存在数字IO重合问题, 就会影响通讯质量. 一旦通讯失败, openpnp任务就停了.
// @file FindSameDigtalIO
// @note run result below
/*
>> FindSameDigtalIO
------------------------------------------------------------
digtial IO io_sn below:0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 192 193 194 195 196 197 198 199 200
------------------------------------------------------------
find_same_digtial_io
D22 = D11 = 0
D56 = D31 = 0
D59 = D38 = 0
D71 = D6 = 0
D72 = D27 = 0
err - find connect pins = 5
END, dead loop*/#define ENABLE_UART_DEBUG_PRINT
#define UART_LOG_LEVEL_INFO 0
#define LINE_60 "------------------------------------------------------------"int UartDebugPrintf(uint8_t log_level, const char *format, ...);void setup() {//start serial connectionSerial.begin(115200);//configure pin 2 as an input and enable the internal pull-up resistor// pinMode(2, INPUT_PULLUP);// pinMode(13, OUTPUT);UartDebugPrintf(UART_LOG_LEVEL_INFO, ">> FindSameDigtalIO\r\n");
}int get_digtial_io_cnt();
int get_digtial_io_sn(int iPosition);
void show_all_digtial_io_value();
void find_same_digtial_io();
int find_same_digtial_io(int ipos);void loop() {// 数字IO范围 D0 ~ D72, A0 ~A8// 数字IO的值范围 0 ~ 72, 0xC0 ~ 0xC8// //// //read the pushbutton value into a variable// int sensorVal = digitalRead(2);// //print out the value of the pushbutton// Serial.println(sensorVal);// // Keep in mind the pull-up means the pushbutton's logic is inverted. It goes// // HIGH when it's open, and LOW when it's pressed. Turn on pin 13 when the// // button's pressed, and off when it's not:// if (sensorVal == HIGH) {// digitalWrite(13, LOW);// } else {// digitalWrite(13, HIGH);// }show_all_digtial_io_value();find_same_digtial_io();UartDebugPrintf(UART_LOG_LEVEL_INFO, "END, dead loop\r\n");do {delay(1);} while (true);
}int UartDebugPrintf(uint8_t log_level, const char *format, ...) {
#ifndef ENABLE_UART_DEBUG_PRINTreturn -1;
#elseint iRc = 0;char szBuf[0x100];va_list args;switch (log_level) {// @info 如果要屏蔽哪一级的日志, 就将日志级别放在case中// 屏蔽case到的日志级别// case UART_LOG_LEVEL_INFO:// {// return -1;// }// break;default:break;}if (NULL == format) {return -1;}memset(szBuf, 0, sizeof(szBuf));va_start(args, format);iRc = vsnprintf(szBuf, sizeof(szBuf) - 1, format, args);va_end(args);if (iRc <= 0) {return iRc;}return Serial.printf(szBuf);
#endif // #ifdef FLAG_UART_DEBUG_PRINT
}const int g_digtial_io_cnt = ((72 - 0 + 1) + (0xA8 - 0xA0 + 1));
int get_digtial_io_cnt() {// 数字IO范围 D0 ~ D72, A0 ~A8// 数字IO的值范围 0 ~ 72, 0xC0 ~ 0xC8return g_digtial_io_cnt;
}int get_digtial_io_sn(int iPosition) {if ((iPosition < 0) || (iPosition >= g_digtial_io_cnt)) {return -1; // error}if ((iPosition >= 0) && (iPosition <= 72)) {return iPosition;} else {return (0xC0 + (iPosition - 72 - 1));}
}void show_all_digtial_io_value() {int i = 0;int io_sn = 0;int i_col = 0;UartDebugPrintf(UART_LOG_LEVEL_INFO, "%s\r\n", LINE_60);UartDebugPrintf(UART_LOG_LEVEL_INFO, "digtial IO io_sn below:\r\n");for (i = 0; i < get_digtial_io_cnt(); i++) {io_sn = get_digtial_io_sn(i);UartDebugPrintf(UART_LOG_LEVEL_INFO, "%6d ", io_sn);// if (i <= 72) {// UartDebugPrintf(UART_LOG_LEVEL_INFO, "%6d ", value);// } else {// UartDebugPrintf(UART_LOG_LEVEL_INFO, "%6.2X ", /*"0x",*/ value);// }if (8 == ++i_col) {i_col = 0;UartDebugPrintf(UART_LOG_LEVEL_INFO, "\r\n");}}UartDebugPrintf(UART_LOG_LEVEL_INFO, "\r\n%s\r\n", LINE_60);
}void find_same_digtial_io() {int i = 0;int i_pins_connect_cnt = 0;UartDebugPrintf(UART_LOG_LEVEL_INFO, "find_same_digtial_io\r\n");for (i = 0; i < get_digtial_io_cnt(); i++) {i_pins_connect_cnt += find_same_digtial_io(i);}if (0 == i_pins_connect_cnt) {UartDebugPrintf(UART_LOG_LEVEL_INFO, "ok - not find connect pins\r\n");} else {UartDebugPrintf(UART_LOG_LEVEL_INFO, "err - find connect pins = %d\r\n", i_pins_connect_cnt);}
}int find_same_digtial_io(int ipos) {int i = 0;int io_sn = 0;int io_sn_pos = 0;int value_readback = 0;int value_ipos = 0;int i_pins_connect_cnt = 0;// 将 ipos位置的引脚设置为输出// 将其他引脚设置为输入for (i = 0; i < get_digtial_io_cnt(); i++) {io_sn = get_digtial_io_sn(i);if (i == ipos) {// 设置为输出pinMode(io_sn, OUTPUT);} else {// 设置为输入, 内部上拉pinMode(io_sn, INPUT_PULLUP);}}// 将ipos对应引脚设置为Lio_sn = get_digtial_io_sn(ipos);io_sn_pos = io_sn;digitalWrite(io_sn, LOW);delay(10);for (i = 0; i < get_digtial_io_cnt(); i++) {if (i == ipos) {continue;}io_sn = get_digtial_io_sn(i);value_readback = digitalRead(io_sn);if (LOW == value_readback) {UartDebugPrintf(UART_LOG_LEVEL_INFO, "D%d = D%d = %d\r\n", io_sn_pos, io_sn, value_readback);i_pins_connect_cnt++;}}return i_pins_connect_cnt;
}确定要摘掉的数字重合线
find_same_digtial_io
D22 = D11 = 0
D56 = D31 = 0
D59 = D38 = 0
D71 = D6 = 0
D72 = D27 = 0
err - find connect pins = 5
我的飞达控制工程中, 有数字IO对应的航插端口号, 找到之后, 将物理飞达摘掉.
// D22 = D11 = 0
// FD_TX69/D22_CN7_13/数字IO号码 = 22 // 保留FD_TX69
SoftwareSerial softUartToFd_22(22, 22, true);// D22 = D11 = 0
// FD_TX70/D11_CN7_14/数字IO号码 = 11 // 摘掉FD_TX70飞达
SoftwareSerial softUartToFd_11(11, 11, true);// D56 = D31 = 0
// FD_TX20/D56_CN9_14/数字IO号码 = 56 // 保留飞达 FD_TX20
SoftwareSerial softUartToFd_56(56, 56, true);// D56 = D31 = 0
// FD_TX42/D31_CN10_25/数字IO号码 = 31 // 摘掉飞达 FD_TX42
SoftwareSerial softUartToFd_31(31, 31, true);// D59 = D38 = 0
// FD_TX25/D59_CN9_20/数字IO号码 = 59 // 保留飞达FD_TX25
SoftwareSerial softUartToFd_59(59, 59, true);// D59 = D38 = 0
// FD_TX41/D38_CN10_28/数字IO号码 = 38 // 摘掉飞达 FD_TX41
SoftwareSerial softUartToFd_38(38, 38, true);
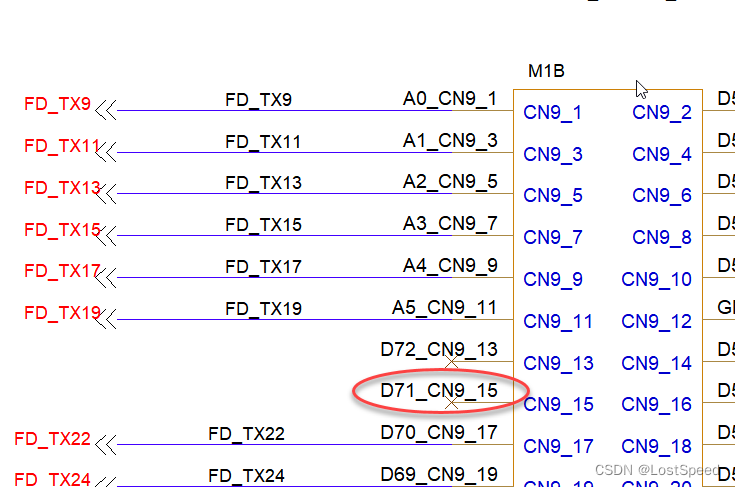
// D71 = D6 = 0
// FD_TX24/D69_CN9_19/数字IO号码 = 69 // 保留FD_TX24
SoftwareSerial softUartToFd_69(69, 69, true);
D71在原理图上没用, 所以和D6不冲突.
// D72 = D27 = 0
// FD_TX50/D27_CN10_15/数字IO号码 = 27 // 保留FD_TX50
SoftwareSerial softUartToFd_27(27, 27, true);D72在原理图中没用, 所以和D27不冲突.
综合以上, 需要摘到的飞达为3把:
// FD_TX70/D11_CN7_14/数字IO号码 = 11 // 摘掉FD_TX70飞达
// FD_TX42/D31_CN10_25/数字IO号码 = 31 // 摘掉飞达 FD_TX42
// FD_TX41/D38_CN10_28/数字IO号码 = 38 // 摘掉飞达 FD_TX41
在代码中已经记录了飞达的物理位置(和航插到飞达控制板插座的连接有关)
// FD_TX70/D11_CN7_14/数字IO号码 = 11 // 面对设备背面, 从左往右数, 第17个航插 // 摘掉FD_TX70飞达FEEDER_UART_INFO(11, &softUartToFd_11), // 正对设备背面, 从右往左第10个飞达 M615 N84\r\n M615 N85\r\n // 不好使// FD_TX42/D31_CN10_25/数字IO号码 = 31 // 摘掉飞达 FD_TX42FEEDER_UART_INFO(31, &softUartToFd_31), // M615 N68\r\n M615N69 \r\n // 面对设备背面, 从左往右数, 第9个航插// FD_TX41/D38_CN10_28/数字IO号码 = 38 // 摘掉飞达 FD_TX41FEEDER_UART_INFO(38, &softUartToFd_38), // M615 N70\r\n M615N71 \r\n // 面对设备背面, 从左往右数, 第10个航插如果不是工程实现中记录的仔细, 要摘掉哪个飞达还真有点懵.

明天再测试一遍, 看看在物理飞达正常的情况下, 飞达通讯上是否非常流畅?
今天测试了一下, 除了个别飞达本身有问题, 换上好的飞达后, 通讯没问题, 再也没出现某个飞达因为回包乱码导致的通讯失败.
自动化测试的问题
在openpnp中, 最好某个固定位置的飞达有固定的飞达ID, 如果有问题, 或者飞达通讯失败, 可以马上发现.
这就需要将固定位置的飞达都设置为预想的ID.
但是, 西门子二手飞达难免发生问题, 如果再换一把飞达, 或者将飞达交换了位置, 此时, 还需要固定位置的飞达有固定的ID. 如果手工设置, 就太勉强了.
而且还想在openpnp运行前, 知道哪个飞达有通讯问题. 这也不是手工能便利做到的.
还是老套路, 写个测试程序.
测试程序的功能如下:
- 遍历设备上的每个飞达航插位, 进行如下操作.
- 如果飞达的ID不是预想的ID, 就设置为预想的ID
- 如果飞达的状态是错误的, 就要报出来, 并统计总共有多少个错误.
正好以前在CSDN上传过串口测试程序, 将工程下载到本地, 将逻辑换为飞达控制板的协议就ok.
写了4个小时, 搞定. 运行一分钟不到, 就可以将设备上挂满飞达的场景全部测试, 设置完成.
自己会写2句程序, 管用啊.
测试程序的场景
设备挂满飞达. 除了数字IO重合的3把飞达, 总共挂了49把2x8mm的西门子飞达, 总共98个8mm料位.
挂满飞达就是为了测试满载状态下有没有可能会出问题? e.g. 电流不够, 通讯不畅.
结果很好, 没啥问题.
现在飞达都换成了测试通过的正常飞达, 开机上电后, 飞达都正常上了电, 没有飞达会出现错误指示灯:)
测试程序的运行效果
运行后, 如果有错误就报出, 如果没看到错误,就是飞达运行正常.
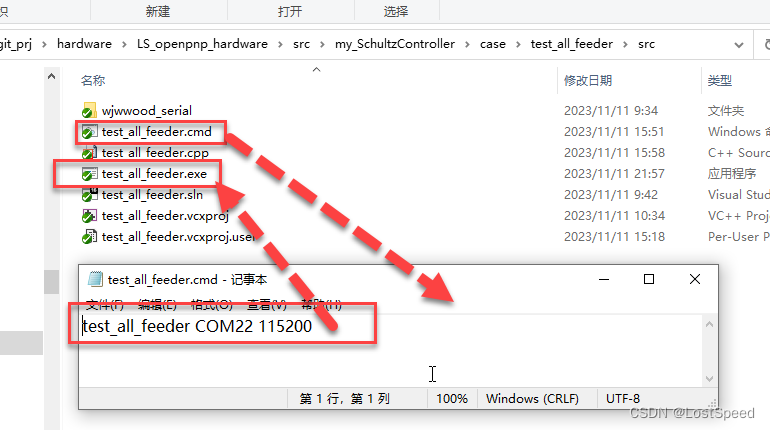
程序参数(串口号码, 波特率)可以由程序命令行参数给出, 也可以运行程序后, 根据程序的参数提示给出.
D:\my_dev\my_local_git_prj\hardware\LS_openpnp_hardware\src\my_SchultzController\case\test_all_feeder\src>test_all_feeder COM22 115200
>> test all feederargv[1] = COM22
argv[2] = 115200
-------------------------------------------------------------------------------------------------------------------------------------
|port_sn |port_name |port_desc |port_hd_id |
-------------------------------------------------------------------------------------------------------------------------------------
|0 |COM22 |STMicroelectronics STLink Virtual COM Port (COM22) |USB\VID_0483&PID_374E&REV_0100&MI_02 |
-------------------------------------------------------------------------------------------------------------------------------------
|1 |COM8 |USB-SERIAL CH340 (COM8) |USB\VID_1A86&PID_7523&REV_0264 |
-------------------------------------------------------------------------------------------------------------------------------------
THE com port name is "COM22"you select com timout(ms) is 100you select data bits is 8you select com parity type(sn) 0
you select com parity type is parity_noneyou select com stopbits(sn) 1
you select com stop bits is 1bitsyou select com flowcontrol(sn) 0
you select com flowcontrol is none-------------------------------------------------------------------------------------------------------------------------------------
COM port info:
-------------------------------------------------------------------------------------------------------------------------------------
com port = COM22
baudrate = 115200
timout = 100(ms)
data bits = 8
parity type = parity_none
stop bits = 1bits
flowcontrol = none
-------------------------------------------------------------------------------------------------------------------------------------
COM port open ok!
process all feeder
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[1L] : N0
FeederNoBase1[1R] : N1
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[2L] : N2
FeederNoBase1[2R] : N3
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[3L] : N4
FeederNoBase1[3R] : N5
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[4L] : N6
FeederNoBase1[4R] : N7
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[5L] : N8
FeederNoBase1[5R] : N9
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[6L] : N10
FeederNoBase1[6R] : N11
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[7L] : N12
FeederNoBase1[7R] : N13
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[8L] : N14
FeederNoBase1[8R] : N15
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[9L] : N16
FeederNoBase1[9R] : N17
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[10L] : N18
FeederNoBase1[10R] : N19
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[11L] : N20
FeederNoBase1[11R] : N21
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[12L] : N22
FeederNoBase1[12R] : N23
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[13L] : N24
FeederNoBase1[13R] : N25
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[14L] : N26
FeederNoBase1[14R] : N27
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[15L] : N28
FeederNoBase1[15R] : N29
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[16L] : N30
FeederNoBase1[16R] : N31
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[17L] : N32
FeederNoBase1[17R] : N33
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[18L] : N34
FeederNoBase1[18R] : N35
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[19L] : N36
FeederNoBase1[19R] : N37
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[20L] : N38
FeederNoBase1[20R] : N39
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[21L] : N40
FeederNoBase1[21R] : N41
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[22L] : N42
FeederNoBase1[22R] : N43
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[23L] : N44
FeederNoBase1[23R] : N45
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[24L] : N46
FeederNoBase1[24R] : N47
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[25L] : N48
FeederNoBase1[25R] : N49
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[26L] : N50
FeederNoBase1[26R] : N51
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[27L] : N52
FeederNoBase1[27R] : N53
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[28L] : N54
FeederNoBase1[28R] : N55
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[29L] : N56
FeederNoBase1[29R] : N57
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[30L] : N58
FeederNoBase1[30R] : N59
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[31L] : N60
FeederNoBase1[31R] : N61
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[32L] : N62
FeederNoBase1[32R] : N63
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[33L] : N64
FeederNoBase1[33R] : N65
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[34L] : N66
FeederNoBase1[34R] : N67
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1 35 not exist, skip
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1 36 not exist, skip
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[37L] : N72
FeederNoBase1[37R] : N73
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[38L] : N74
FeederNoBase1[38R] : N75
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[39L] : N76
FeederNoBase1[39R] : N77
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[40L] : N78
FeederNoBase1[40R] : N79
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[41L] : N80
FeederNoBase1[41R] : N81
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[42L] : N82
FeederNoBase1[42R] : N83
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1 43 not exist, skip
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[44L] : N86
FeederNoBase1[44R] : N87
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[45L] : N88
FeederNoBase1[45R] : N89
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[46L] : N90
FeederNoBase1[46R] : N91
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[47L] : N92
FeederNoBase1[47R] : N93
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[48L] : N94
FeederNoBase1[48R] : N95
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[49L] : N96
FeederNoBase1[49R] : N97
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[50L] : N98
FeederNoBase1[50R] : N99
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[51L] : N100
FeederNoBase1[51R] : N101
-------------------------------------------------------------------------------------------------------------------------------------
FeederNoBase1[52L] : N102
FeederNoBase1[52R] : N103
-------------------------------------------------------------------------------------------------------------------------------------
ok : feeder process all ok
请按任意键继续. . .
测试程序实现
vs2019 + vc++ + console
都写在一个cpp中了, 不到800行, 写了4个小时, 边写边连着设备调试.
// @file test_all_feeder.cpp
// @brief 测试设备上的所有飞达
// @note
// prj base https://lostspeed.blog.csdn.net/article/details/109882721 <<串口自动应答测试程序>>
// base prj download from : https://download.csdn.net/download/LostSpeed/13132083 <<ls_serial_port_test_tool_v1.zip>>#include <windows.h>#include <string>
#include <iostream>
#include <cstdio>using namespace std;#include "serial/serial.h"
#pragma comment(lib, "Setupapi.lib")//#if (_MSC_VER >= 1915)
//#define no_init_all deprecated
//#endif#define LINE_10 "----------"
#define LINE_3 "---"
#define LINE120 LINE_10 LINE_10 LINE_10 LINE_10 LINE_10 LINE_10 LINE_10 LINE_10 LINE_10 LINE_10 LINE_10 LINE_10 LINE_10 LINE_3
#define LINE_IND LINE120
#define LINE_TIP_FMT "|%-10s|%-10s|%-60s|%-48s|\n"
#define LINE_CONTENT_FMT "|%-10d|%-10s|%-60s|%-48s|\n"#define LINE_DATA_BITS_TIP_FMT "|%-10s %-10s %-60s %-48s|\n"
#define LINE_DATA_BITS_CONTENT_FMT "|%-10d %-10s %-60s %-48s|\n"#define LINE_PARITY_TIP_FMT "|%-10s|%-10s %-60s %-48s|\n"
#define LINE_PARITY_CONTENT_FMT "|%-10d|%-10s %-60s %-48s|\n"#define LINE_STOPBITS_TIP_FMT "|%-10s|%-10s %-60s %-48s|\n"
#define LINE_STOPBITS_CONTENT_FMT "|%-10d|%-10s %-60s %-48s|\n"#define LINE_FLOWCONTROL_TIP_FMT "|%-10s|%-10s %-60s %-48s|\n"
#define LINE_FLOWCONTROL_CONTENT_FMT "|%-10d|%-10s %-60s %-48s|\n"const char* get_parity_type(serial::parity_t type)
{const char* psz_type = "unknown parity type";switch (type) {case serial::parity_t::parity_none:psz_type = "parity_none";break;case serial::parity_t::parity_odd:psz_type = "parity_odd";break;case serial::parity_t::parity_even:psz_type = "parity_even";break;case serial::parity_t::parity_mark:psz_type = "parity_mark";break;case serial::parity_t::parity_space:psz_type = "parity_space";break;default:break;}return psz_type;
}const char* get_stopbits_type(serial::stopbits_t type)
{const char* psz_type = "unknown stopbits type";switch (type) {case serial::stopbits_t::stopbits_one:psz_type = "1bits";break;case serial::stopbits_t::stopbits_one_point_five:psz_type = "1.5bits";break;case serial::stopbits_t::stopbits_two:psz_type = "2bits";break;default:break;}return psz_type;
}const char* get_flowcontroltype(serial::flowcontrol_t type)
{const char* psz_type = "unknown flowcontrol type";switch (type) {case serial::flowcontrol_t::flowcontrol_hardware:psz_type = "hardware";break;case serial::flowcontrol_t::flowcontrol_none:psz_type = "none";break;case serial::flowcontrol_t::flowcontrol_software:psz_type = "software";break;default:break;}return psz_type;
}void proc_uart(serial::Serial& my_serial);int main(int argc, char** argv)
{int i = 0;int i_tmp = 0;bool b_cmd_line_param = false;char szBufCmdLine_UartName[0x100];int BufCmdLIne_UartBps = 0;uint8_t buf_rx[4096] = {'\0'};size_t buf_rx_len = 0;size_t buf_rx_total_len = 0;uint8_t buf_tx[4096] = { '\0' };size_t buf_tx_len = 0;int dev_port = -1;uint32_t dev_baurd = 0;uint32_t dev_timeout = 0;serial::bytesize_t dev_data_bits = serial::bytesize_t::eightbits;serial::parity_t dev_parity_type = serial::parity_t::parity_none;serial::stopbits_t dev_stopbits = serial::stopbits_t::stopbits_one;serial::flowcontrol_t dev_flowcontrol_type = serial::flowcontrol_t::flowcontrol_none;ShowWindow(GetConsoleWindow(), SW_MAXIMIZE); do {printf(">> test all feeder\n\n");if (3 == argc){// 用户给了串口号和bpsprintf("argv[%d] = %s\n", 1, argv[1]);strcpy(szBufCmdLine_UartName, argv[1]);printf("argv[%d] = %s\n", 2, argv[2]);BufCmdLIne_UartBps = atoi(argv[2]);b_cmd_line_param = true;}vector<serial::PortInfo> devices_found = serial::list_ports();vector<serial::PortInfo>::iterator iter;// 选择串口// 顶住左边开始, 每30个字符为一个显示字段printf("%s\n", LINE_IND);printf(LINE_TIP_FMT, "port_sn", "port_name", "port_desc", "port_hd_id");printf("%s\n", LINE_IND);dev_port = 0;iter = devices_found.begin();while (iter != devices_found.end()){serial::PortInfo device = *iter++;printf(LINE_CONTENT_FMT, dev_port++, device.port.c_str(), device.description.c_str(), device.hardware_id.c_str());printf("%s\n", LINE_IND);}if (!b_cmd_line_param){printf("please select com port(port_sn):");scanf_s("%2d", &dev_port);printf("you select com port(port_sn) is %d\n", dev_port);}else {// szBufCmdLine_UartName// BufCmdLIne_UartBpsdev_port = -1;iter = devices_found.begin();while (iter != devices_found.end()){serial::PortInfo device = *iter++;dev_port++;if (0 == strcmp(szBufCmdLine_UartName, device.port.c_str())){break; // find it}}}if ((dev_port < 0) || (dev_port >= devices_found.size())) {printf("com port select error!\n");break;}printf("THE com port name is \"%s\"\n\n", devices_found[dev_port].port.c_str());// 选择波特率if (!b_cmd_line_param){printf("please select com baudrate:");scanf_s("%u", &dev_baurd);printf("you select com baudrate is %u\n\n", dev_baurd);}else {dev_baurd = BufCmdLIne_UartBps;}// 选择超时// printf("please select com timout(ms):");// scanf_s("%u", &dev_timeout);dev_timeout = 100;printf("you select com timout(ms) is %u\n\n", dev_timeout);// 选择数据位//printf("%s\n", LINE_IND);//printf(LINE_DATA_BITS_TIP_FMT, "bits", "", "", "");//printf("%s\n", LINE_IND);//for (i = (int)serial::bytesize_t::fivebits; i <= (int)serial::bytesize_t::eightbits; i++) {// printf(LINE_DATA_BITS_CONTENT_FMT, i, "", "", "");// printf("%s\n", LINE_IND);//}//printf("please select com data bits:");// scanf_s("%u", &i_tmp);i_tmp = 8;printf("you select data bits is %d\n\n", i_tmp);if ((i_tmp < (int)serial::bytesize_t::fivebits)|| (i_tmp > (int)serial::bytesize_t::eightbits)) {printf("error\n");break;}dev_data_bits = (serial::bytesize_t)i_tmp;// 选择校验位//printf("%s\n", LINE_IND);//printf(LINE_PARITY_TIP_FMT, "sn", "type", "", "");//printf("%s\n", LINE_IND);//printf(LINE_PARITY_CONTENT_FMT, (int)serial::parity_t::parity_none, "none", "", "");//printf("%s\n", LINE_IND);//printf(LINE_PARITY_CONTENT_FMT, (int)serial::parity_t::parity_odd, "odd", "", "");//printf("%s\n", LINE_IND);//printf(LINE_PARITY_CONTENT_FMT, (int)serial::parity_t::parity_even, "even", "", "");//printf("%s\n", LINE_IND);//printf(LINE_PARITY_CONTENT_FMT, (int)serial::parity_t::parity_mark, "mark", "", "");//printf("%s\n", LINE_IND);//printf(LINE_PARITY_CONTENT_FMT, (int)serial::parity_t::parity_space, "space", "", "");//printf("%s\n", LINE_IND);//printf("please select com parity type(sn):");// scanf_s("%u", &i_tmp);i_tmp = 0;printf("you select com parity type(sn) %d\n", i_tmp);if ((i_tmp < (int)serial::parity_t::parity_none)|| (i_tmp > (int)serial::parity_t::parity_space)) {printf("error\n");break;}dev_parity_type = (serial::parity_t)i_tmp;printf("you select com parity type is %s\n\n",get_parity_type(dev_parity_type));// 选择停止位//printf("%s\n", LINE_IND);//printf(LINE_STOPBITS_TIP_FMT, "sn", "bits", "", "");//printf("%s\n", LINE_IND);//printf(LINE_STOPBITS_CONTENT_FMT, (int)serial::stopbits_t::stopbits_one, "1 bits", "", "");//printf("%s\n", LINE_IND);//printf(LINE_STOPBITS_CONTENT_FMT, (int)serial::stopbits_t::stopbits_one_point_five, "1.5 bits", "", "");//printf("%s\n", LINE_IND);//printf(LINE_STOPBITS_CONTENT_FMT, (int)serial::stopbits_t::stopbits_two, "2 bits", "", "");//printf("%s\n", LINE_IND);// printf("please select com stopbits(sn):");// scanf_s("%u", &i_tmp);i_tmp = 1;printf("you select com stopbits(sn) %d\n", i_tmp);if ((i_tmp < (int)serial::stopbits_t::stopbits_one)|| (i_tmp > (int)serial::stopbits_t::stopbits_one_point_five)) {printf("error\n");break;}dev_stopbits = (serial::stopbits_t)i_tmp;printf("you select com stop bits is %s\n\n",get_stopbits_type(dev_stopbits));// 选择流控//printf("%s\n", LINE_IND);//printf(LINE_FLOWCONTROL_TIP_FMT, "sn", "type", "", "");//printf("%s\n", LINE_IND);//printf(LINE_FLOWCONTROL_CONTENT_FMT, (int)serial::flowcontrol_t::flowcontrol_none, "none", "", "");//printf("%s\n", LINE_IND);//printf(LINE_FLOWCONTROL_CONTENT_FMT, (int)serial::flowcontrol_t::flowcontrol_hardware, "hardware", "", "");//printf("%s\n", LINE_IND); ////printf(LINE_FLOWCONTROL_CONTENT_FMT, (int)serial::flowcontrol_t::flowcontrol_software, "software", "", "");//printf("%s\n", LINE_IND);//printf("please select com flowcontrol(sn):");// scanf_s("%u", &i_tmp);i_tmp = 0;printf("you select com flowcontrol(sn) %d\n", i_tmp);if ((i_tmp < (int)serial::flowcontrol_t::flowcontrol_none)|| (i_tmp > (int)serial::flowcontrol_t::flowcontrol_hardware)) {printf("error\n");break;}dev_flowcontrol_type = (serial::flowcontrol_t)i_tmp;printf("you select com flowcontrol is %s\n\n",get_flowcontroltype(dev_flowcontrol_type));// 再整体打印一次用户的串口信息选择printf("%s\n", LINE_IND);printf("COM port info:\n");printf("%s\n", LINE_IND);printf("com port = %s\n", devices_found[dev_port].port.c_str());printf("baudrate = %u\n", dev_baurd);printf("timout = %u(ms)\n", dev_timeout);printf("data bits = %d\n", dev_data_bits);printf("parity type = %s\n", get_parity_type(dev_parity_type));printf("stop bits = %s\n", get_stopbits_type(dev_stopbits));printf("flowcontrol = %s\n", get_flowcontroltype(dev_flowcontrol_type));printf("%s\n", LINE_IND);serial::Serial my_serial(devices_found[dev_port].port.c_str(),dev_baurd,serial::Timeout::simpleTimeout(dev_timeout),dev_data_bits,dev_parity_type,dev_stopbits,dev_flowcontrol_type);if (my_serial.isOpen()) {printf("COM port open ok!\n");}else {printf("COM port open failed...\n");break;}/*void setTimeout (uint32_t inter_byte_timeout,uint32_t read_timeout_constant,uint32_t read_timeout_multiplier,uint32_t write_timeout_constant,uint32_t write_timeout_multiplier)*/my_serial.setTimeout(serial::Timeout::max(),dev_timeout /*1000*/ /*serial::Timeout::max()*/, // 这里是读超时,如果是发送完等接收,这里就设置正常ms超时值; 如果是被动等别人问,就设置成serial::Timeout::max()0,0,0);proc_uart(my_serial);} while (false);system("pause");return EXIT_SUCCESS;
}void M999(serial::Serial& my_serial)
{size_t LenRx = 0;char szBufSend[1024];char szBufRecv[1024];do {memset(szBufSend, 0, sizeof(szBufSend));memset(szBufRecv, 0, sizeof(szBufRecv));// send M999sprintf(szBufSend, "M999\r\n");my_serial.write((uint8_t*)szBufSend, strlen(szBufSend));memset(szBufRecv, 0, sizeof(szBufRecv));LenRx = my_serial.read((uint8_t*)szBufRecv, sizeof(szBufRecv));if (LenRx <= 0){break;}/*M115 MCODE_DRIVER_INFOM600 MCODE_PRE_PICKM601 MCODE_ADVANCE e.g. M601N0X1 is ok, M601N0X0 is errM602 MCODE_FEEDER_STATUSM603 MCODE_GET_FEED_COUNTM623 MCODE_CLEAR_FEED_COUNTM604 MCODE_GET_ERR42_COUNTM605 MCODE_GET_ERR43_COUNTM606 MCODE_GET_ERR44_COUNTM607 MCODE_GET_RESET_COUNTM608 MCODE_GET_PITCHM628 MCODE_TOGGLE_PITCHM610 MCODE_GET_FEEDER_IDM640 MCODE_SET_FEEDER_IDM630 MCODE_READ_EEPROMM615 MCODE_GET_FIRMWARE_INFOM650 MCODE_START_SELF_TESTM651 MCODE_STOP_SELF_TESTM998 MCODE_CLEAR_RX_BUFM999 MCODE_CMD_HELP*/printf("%s\n", szBufRecv);} while (false);
}bool proc_uart_Nxx(serial::Serial& my_serial, int FeederNoBase1, int Nxx);void proc_uart(serial::Serial& my_serial)
{int i = 0;int j = 0;int FeederNoBase1 = 0;int Nxx = 0;int i_err_cnt = 0;size_t LenRx = 0;char szBufNxx[0x100];// basic usage// buf_rx_len = my_serial.read(buf_rx + buf_rx_total_len, sizeof(char));// buf_tx_len = my_serial.write(buf_tx, 7); // send respond// M999(my_serial);/*// FD_TX70/D11_CN7_14/数字IO号码 = 11 // 面对设备背面, 从左往右数, 第17个航插 // 摘掉FD_TX70飞达FEEDER_UART_INFO(11, &softUartToFd_11), // 正对设备背面, 从右往左第10个飞达 M615 N84\r\n M615 N85\r\n // 不好使No.43 FeederN84N85// FD_TX42/D31_CN10_25/数字IO号码 = 31 // 摘掉飞达 FD_TX42FEEDER_UART_INFO(31, &softUartToFd_31), // M615 N68\r\n M615N69 \r\n // 面对设备背面, 从左往右数, 第9个航插No.35 FeederN68N69// FD_TX41/D38_CN10_28/数字IO号码 = 38 // 摘掉飞达 FD_TX41FEEDER_UART_INFO(38, &softUartToFd_38), // M615 N70\r\n M615N71 \r\n // 面对设备背面, 从左往右数, 第10个航插No.36 FeederN70N71*/// 设备满配物理飞达数量52(正面26, 背面26), 因为数字IO重合, 导致一个数字IO会给多个飞达发包, 所以去掉了3把.printf("process all feeder\n");for (i = 0; i < 52; i++){printf("%s\n", LINE_IND);FeederNoBase1 = i + 1;if ((43 == FeederNoBase1) || (35 == FeederNoBase1) || (36 == FeederNoBase1)){// 跳过因为数字IO重合而摘掉的物理飞达printf("FeederNoBase1 %d not exist, skip\n", FeederNoBase1);continue;}for (j = 0; j < 2; j++){Nxx = (i * 2 + j);sprintf(szBufNxx, "FeederNoBase1[%d%s] : N%d", FeederNoBase1, ((0 == (Nxx % 2)) ? "L" : "R"), Nxx);printf("%s\n", szBufNxx);if (!proc_uart_Nxx(my_serial, FeederNoBase1, Nxx)){i_err_cnt++;}}}printf("%s\n", LINE_IND);if (0 == i_err_cnt){printf("ok : feeder process all ok\n");}else {printf("error : 1 feeder process error counter = %d\n", i_err_cnt);}}bool is_err_recv(const char* psz_msg)
{// ok ID: 1001L// ok ID setbool b_err = true;const char* psz = NULL;do {if (NULL == psz_msg){break;}psz = strstr(psz_msg, "err");if (psz == psz_msg){break;}b_err = false;} while (false);return b_err;
}bool is_dig_char(char c)
{if ((c >= '0') && (c <= '9')){return true;}return false;
}bool get_id_from_recv(const char* psz_msg, int& id, bool& isLeft)
{// ok ID: 1001Lbool b_ok = false;const char* psz = NULL;do {if (NULL == psz_msg){break;}psz = strstr(psz_msg, "ok ID: ");if (NULL == psz){break;}psz_msg = psz;psz_msg += strlen("ok ID: ");id = atoi(psz_msg);do {if (is_dig_char(psz_msg[0])){psz_msg++;continue;}break;} while (true);if (('L' != psz_msg[0]) && ('R' != psz_msg[0])){break;}isLeft = ('L' == psz_msg[0]);b_ok = true;} while (false);return b_ok;
}bool proc_uart_read_status(serial::Serial& my_serial, int Nxx, char* psz_recv, int len_recv)
{// M602 MCODE_FEEDER_STATUSchar szBufSend[1024];bool b_ok = false;int buf_rx_len = 0;do {sprintf(szBufSend, "M602 N%d\r\n", Nxx);my_serial.write((uint8_t*)szBufSend, strlen(szBufSend));memset(psz_recv, 0, len_recv);buf_rx_len = (int)my_serial.read((uint8_t*)psz_recv, len_recv);if (buf_rx_len < 0){printf("error : 2 can't recv any form Nxx[%d]\n", Nxx);break;}if (is_err_recv(psz_recv)){printf("error : 3 [%s]\n", psz_recv);break;}b_ok = true;} while (false);return b_ok;
}bool proc_uart_read_ID(serial::Serial& my_serial, int Nxx, int& id, bool& isLeft)
{// M610 MCODE_GET_FEEDER_IDchar szBufSend[1024];char szBufRecv[1024];int buf_rx_len = 0;bool b_ok = false;do {sprintf(szBufSend, "M610 N%d\r\n", Nxx);my_serial.write((uint8_t*)szBufSend, strlen(szBufSend));memset(szBufRecv, 0, sizeof(szBufRecv));buf_rx_len = (int)my_serial.read((uint8_t*)szBufRecv, sizeof(szBufRecv));if (buf_rx_len < 0){printf("error : 5 can't recv any form Nxx[%d]\n", Nxx);break;}if (is_err_recv(szBufRecv)){printf("error : 6 recv content have error, szBufRecv[] = [%s]\n", szBufRecv);break;}// printf("%s\n", szBufRecv);// ok ID: 1001Lif (!get_id_from_recv(szBufRecv, id, isLeft)){printf("error : 7 recv parse error, szBufRecv[] = [%s]\n", szBufRecv);break;}b_ok = true;} while (false);return b_ok;
}bool proc_uart_set_ID(serial::Serial& my_serial, int FeederNoBase1, int Nxx)
{// M640 MCODE_SET_FEEDER_IDchar szBufSend[1024];char szBufRecv[1024];int buf_rx_len = 0;int id = 0;bool isLeft = 0;bool b_ok = false;do {sprintf(szBufSend, "M640 N%dX%d\r\n", Nxx, FeederNoBase1);my_serial.write((uint8_t*)szBufSend, strlen(szBufSend));memset(szBufRecv, 0, sizeof(szBufRecv));buf_rx_len = (int)my_serial.read((uint8_t*)szBufRecv, sizeof(szBufRecv));if (buf_rx_len < 0){printf("error : 8 can't recv any form FeederNoBase1[%d]/Nxx[%d]\n", FeederNoBase1, Nxx);break;}// ok ID setif (is_err_recv(szBufRecv)){printf("error : 9 recv content have error\n");break;}b_ok = true;} while (false);return b_ok;
}bool proc_uart_Nxx_get_feeder_status(serial::Serial& my_serial, int FeederNoBase1, int Nxx)
{bool b_ok = false;char szRecv[1024];do {memset(szRecv, 0, sizeof(szRecv));if (!proc_uart_read_status(my_serial, Nxx, szRecv, sizeof(szRecv))){break;}b_ok = true;} while (false);return b_ok;
}bool proc_uart_Nxx_try_to_change_ID(serial::Serial& my_serial, int FeederNoBase1, int Nxx)
{// M610 MCODE_GET_FEEDER_ID// M640 MCODE_SET_FEEDER_IDint buf_rx_len = 0;int id = 0;bool isLeft = 0;bool b_ok = false;do {if (!proc_uart_read_ID(my_serial, Nxx, id, isLeft)){break;}if (id != FeederNoBase1){if (!proc_uart_set_ID(my_serial, FeederNoBase1, Nxx)){break;}}b_ok = true;} while (false);return b_ok;
}bool proc_uart_Nxx(serial::Serial& my_serial, int FeederNoBase1, int Nxx)
{bool b_ok = false;do {// 检测飞达ID, 如果不是FeederNoBase1, 改为FeederNoBase1if (!proc_uart_Nxx_try_to_change_ID(my_serial, FeederNoBase1, Nxx)){printf("error : 10 can't try to change ID to Feeder%d-%d\n", FeederNoBase1, Nxx);break;}if (!proc_uart_Nxx_get_feeder_status(my_serial, FeederNoBase1, Nxx)){printf("error : 11 can't get feeder status Feeder%d-N%d\n", FeederNoBase1, Nxx);break;}b_ok = true;} while (false);return b_ok;
}备注
飞达控制这块就搞完了.
现在我设备这块, 还有点要优化.
顶部相机现在是100W像素的, 在openpnp中看不清PCB上的0201和01005焊盘.
已经买了1600W像素的USB摄像头模组(安装孔尺寸为28mm x 28mm, 和现在的顶部相机支架兼容), 回来试试.
现在手头这台设备, 所有细节(机械部分, 电气部分, 软件部分)都可以自己维护, 想搞就搞, 很舒服.
END
相关文章:
openpnp - 74路西门子飞达控制板(主控板STM32_NUCLEO-144) - 验证
文章目录 openpnp - 74路西门子飞达控制板(主控板STM32_NUCLEO-144) - 验证概述笔记重复数字IO的问题想法手工实现程序实现确定要摘掉的数字重合线自动化测试的问题测试程序的场景测试程序的运行效果测试程序实现备注END openpnp - 74路西门子飞达控制板(主控板STM32_NUCLEO-14…...

从房地产先后跨界通信、文旅演艺领域,万通发展未来路在何方?
近年来,房地产市场可谓负重前行,各大房企纷纷谋求新出路。 作为中国最早的房企之一,万通发展再次处在转型变革的十字路口。自去年以来,万通发展在转型升级之路上动作频频,可谓忙得不亦乐乎。 大幕落下之时,…...

LLM 中的参数单位
M (Mega) 相比于 Million: 1M (Mega) 在计算机科学中等于 ( 2^{20} )(即 1,048,576)字节。1 Million 等于 ( 10^6 )(即 1,000,000)。因此,1M (Mega) 在数字上略小于 1 Million。 G (Giga) 相比于 Billion&…...

【探索Linux】—— 强大的命令行工具 P.15(进程间通信 —— system V共享内存)
阅读导航 引言一、system V的概念二、共享内存(1) 概念(2) 共享内存示意图(3) 共享内存数据结构 三、共享内存的使用1. 共享内存的使用步骤(1)包含头文件(2)获取键值(ftok函数)(3)创…...
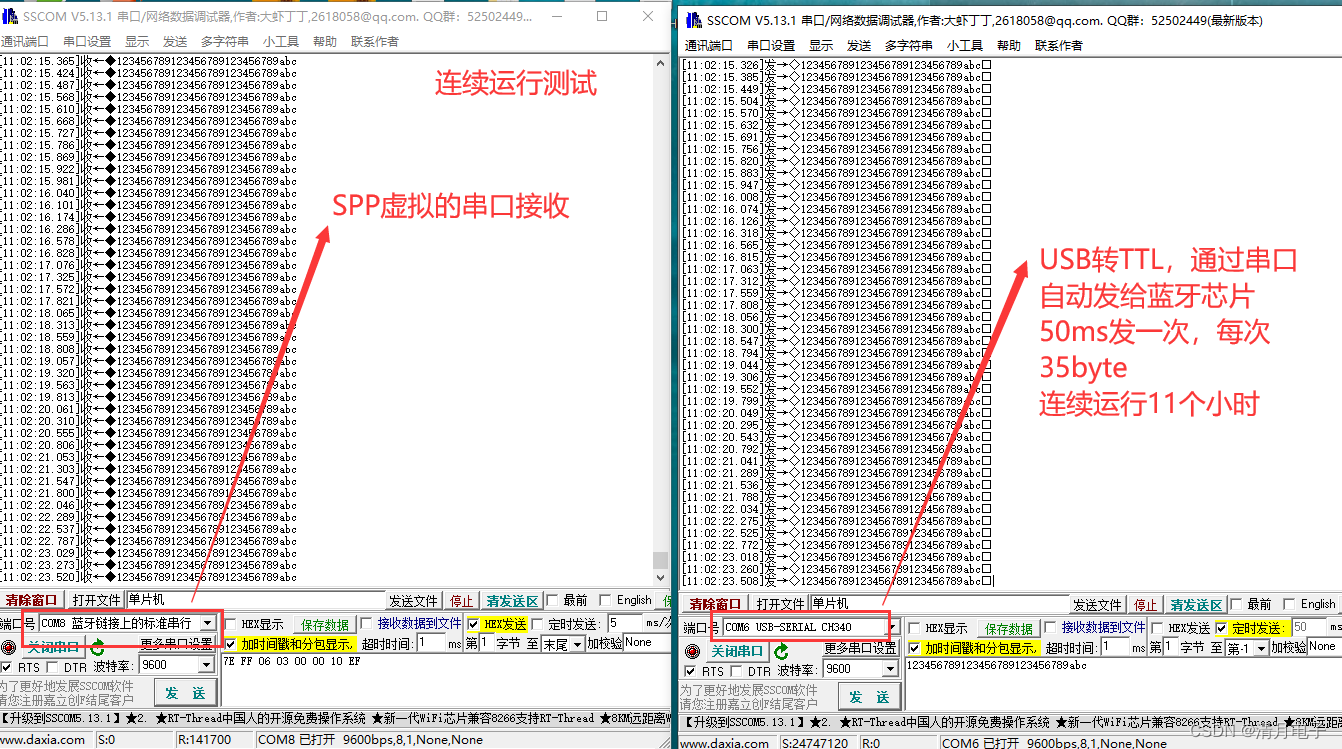
MCU通过KT6368A用SPP透传发送1K左右的数据,手机APP显示是3个包或者4个包,但是我看手册说最大一个包是512,理论应该是两个包吧,请问这正常吗?
一、问题简介 MCU通过KT6368A用SPP透传发送1K左右的数据,手机APP显示是3个包或者4个包,但是我看手册说最大一个包是512,理论应该是两个包吧,请问这正常吗? 详细说明 实际测试的截图如下:使用的是安卓app…...

童装CPC认证检测哪些内容?童装上架亚马逊美国站CPC认证办理
童装是指适合儿童穿着的服装。按年龄分,包括婴儿服装、儿童服装、童装、中年童装、大童服装。CPC认证即儿童产品证书(CPC),主要针对12岁以下的儿童,如玩具、摇篮、童装等。跨境卖家作为“进口商”,想要将中…...
2023鸿蒙预定未来,环境搭建学习
鸿蒙开发基础知识 鸿蒙的基本概念和特点 鸿蒙(HarmonyOS)是华为公司开发的一款全场景分布式操作系统。它的设计目标是为各种设备提供统一的、无缝的用户体验。鸿蒙的核心特点包括以下几个方面: 分布式架构:鸿蒙采用分布式架构&…...
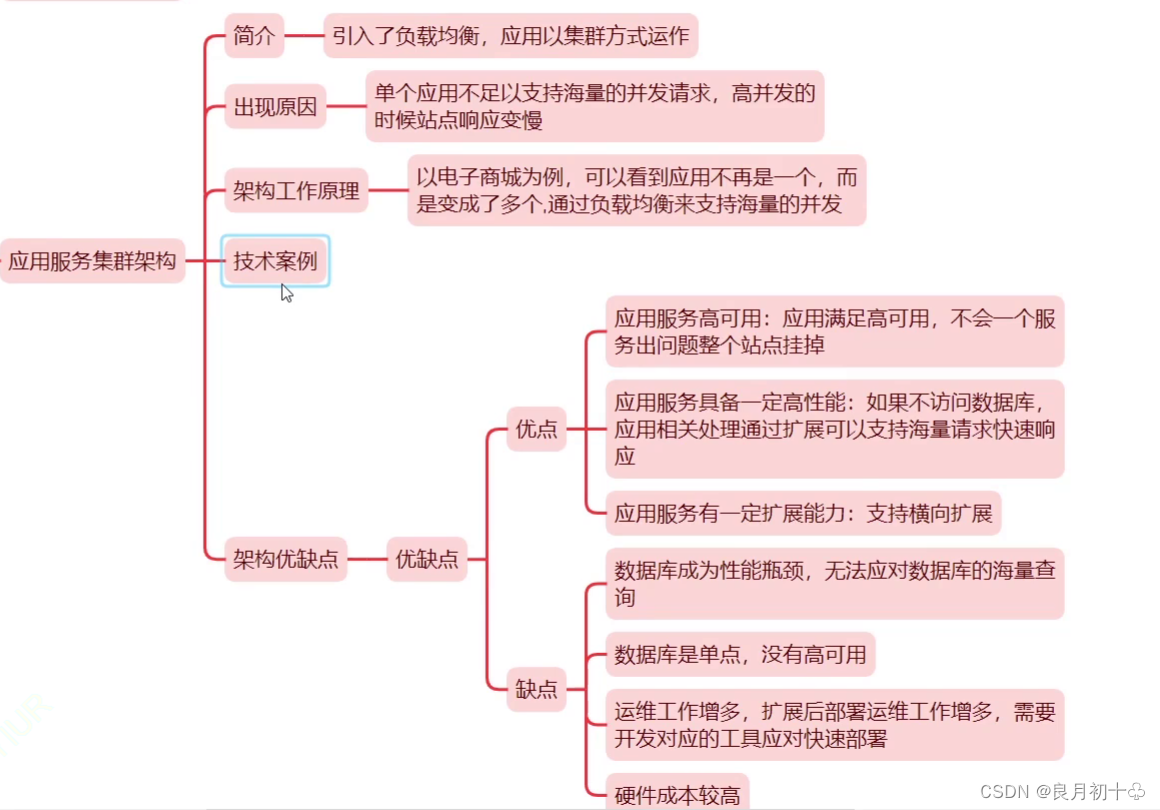
技术架构 - 应用数据分离,应用服务集群架构
前言 上一篇文章介绍了单机架构,由于性能瓶颈,满足不了高访问量,所以演化出了数据分离架构。 这种架构也很简单只是将应用服务和数据库服务分离开来,避免单一架构的资源争夺的情况。 一、 应用数据分离架构 1. 简介 应用服务和…...
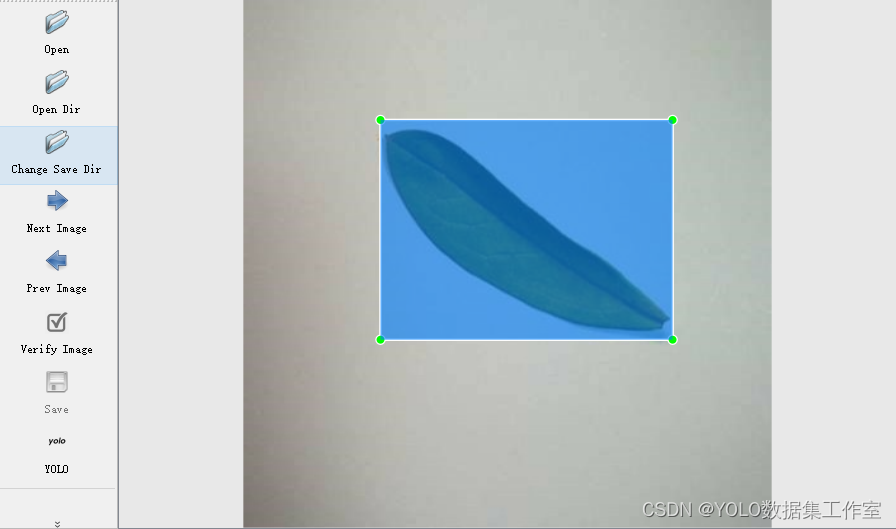
YOLO目标检测——树叶检测数据集下载分享【含对应voc、coco和yolo三种格式标签】
实际项目应用:生物多样性研究、林业管理、环境监测和教育科研等方面数据集说明:树叶分类检测数据,真实场景的高质量图片数据,数据场景丰富,总共十个类别。标签说明:使用lableimg标注软件标注,标…...
ubuntu 20通过docker安装onlyoffice,并配置https访问
目录 一、安装docker (一)更新包列表和安装依赖项 (二)添加Docker的官方GPG密钥 (三)添加Docker存储库 (四)安装Docker (五)启动Docker服务并设置它随系…...
Vue 模板语法 v-bind
红色框里面的都是vue的模板。有了模板就得有模板的特殊语法。上面只是简单的双括号加上表达式,这种叫做插值语法,除了这种语法还有其他语法吗? 插值语法实现的功能很单一,就是将指定的值放到指定的位置。还有一种叫做指令语法&am…...

定义宏,字符串、枚举、接口类绑定
在项目中,有一些接口处理类,比如 "value1"对应的类处理使用class Cvalue1 "value2"对应的类处理使用class Cvalue2 使用 X-Macros 技术能够很大程度上帮助我们,减少代码量并且使得代码简洁。 如果我们需要对每一个字…...
盘点30个Python树莓派源码Python爱好者不容错过
盘点30个Python树莓派源码Python爱好者不容错过 学习知识费力气,收集整理更不易。 知识付费甚欢喜,为咱码农谋福利。 链接:https://pan.baidu.com/s/1LA4cLunntKW3qO5aok3xAQ?pwd8888 提取码:8888 项目名称 PiCar-raspber…...

「Verilog学习笔记」用优先编码器①实现键盘编码电路
专栏前言 本专栏的内容主要是记录本人学习Verilog过程中的一些知识点,刷题网站用的是牛客网 分析 用此编码器实现键盘的编码电路。 注意:编码器的输出是低电平有效,而键盘编码电路输出的是正常的8421BCD码,是高电平有效。因此将编…...

APT攻击的特点及含义
APT(高级持续性威胁Advanced Persistent Threat)攻击是一种高级、持续性的攻击模式,通过先进的攻击手段对特定目标进行长期持续性的网络攻击,一般针对拥有敏感数据的大型企业及重要机构。 APT攻击的特点 一、目标性强 APT攻击并…...
使用html2canvas插件进行页面截屏
使用纯html实现过程 <!DOCTYPE html> <html><head><title>使用html2canvas生成网页截图</title><script src"https://html2canvas.hertzen.com/dist/html2canvas.min.js"></script> </head><body><h1>…...
Java --- JVM的执行引擎
目录 一、执行引擎概述 1.1、执行引擎的工作过程 二、Java代码编译和执行的过程 三、解释器 3.1、解释器工作机制 3.2、解释器分类 3.3、解释器现状 四、JIT编译器 五、热点代码及探测方式 六、方法调用计数器 6.1、热点衰减 七、回边计数器 八、HotSpot VM设置程序…...

前端学习笔记--node.js
Node Node 可以理解成 ECMAScript 内置的模块组成的,引用第三方模块, npm系统 node package manager。 node是基于js的,前端来写服务端通过node是最方便的,node的性能问题 内部采用的多线程。 node中主线程还是单线程的 &#…...

DB2 常用命令及SQL语句
前言 DB2数据库是由IBM开发的关系型数据库管理系统(RDBMS)。它是一种功能强大、可扩展和可靠的数据库解决方案,用于存储和管理企业级应用程序的数据。 以下是一些关于DB2数据库的重要信息和特点: 数据模型:DB2数据库…...

spring-boot-starter-data-redis2.X连接redis7
由于redis7引入了acl机制,可以配置用户权限, 比如配置了一个普通用户 test,权限为 test_ 前缀的key可操作 springboot想要连接,并没有设置用户名的地方, 跟了源码,jedis客户端是支持的,但是s…...

AI赋能5G核心网故障诊断:从PCAP解析到智能根因分析的工程实践
1. 项目概述:当AI遇见5G核心网故障诊断在5G核心网的运维与测试一线干了这么多年,最头疼的莫过于面对海量的PCAP抓包文件。一个复杂的信令流程下来,动辄几千甚至上万个数据包,工程师需要像侦探一样,逐帧审视协议交互&am…...

别再只用Service了!ROS1 Action通信保姆级教程:从导航进度条到任务取消,手把手教你实现带反馈的机器人任务
别再只用Service了!ROS1 Action通信保姆级教程:从导航进度条到任务取消,手把手教你实现带反馈的机器人任务当你的机器人正在执行一个长达10分钟的导航任务时,突然发现目标点设置错误,这时候如果只能干等着任务完成或者…...

利用DiSEqC协议与AVR单片机驱动卫星天线电机改造户外设备
1. 项目概述:用卫星天线电机驱动一切如果你手头有一些需要承受风吹日晒、还得精确转动的设备,比如一个户外的大型定向天线,或者一个需要定期调整角度的太阳能板支架,甚至是一个坚固的监控云台,你可能会为驱动机构发愁。…...

6款高效降AI率工具 改写实力出众
写论文时反复检测出的AI痕迹总让你提心吊胆?别担心,这里整理了6款真正好用的论文降AI率工具,堪称应对AI生成特征的“得力助手”。它们能有效识别并消除AI生成的痕迹,改写能力出众,帮你快速降低查重率,顺利通…...
)
别再只测accuracy!DeepSeek集成测试必须监控的5个隐性指标(P99首token延迟、context bleed率、tool-call schema漂移)
更多请点击: https://intelliparadigm.com 第一章:DeepSeek集成测试的核心范式演进 DeepSeek大模型的工程化落地对集成测试提出了全新挑战:传统基于接口响应码与字段校验的测试范式已难以覆盖语义一致性、推理链鲁棒性、上下文敏感度等高阶质…...

基于可解释机器学习的城市人口流动空间降尺度分析实践
1. 项目概述:从宏观到微观,解码城市脉搏在城市的肌理中,人口的流动如同血液的循环,承载着经济活力、社会互动与空间结构的全部信息。无论是城市规划师优化公交线路,还是商业分析师评估店铺选址,亦或是公共卫…...
)
Mysql:事务管理(中)
在前面的章节中,我们提到了 MVCC(多版本并发控制),它巧妙地通过“版本快照”解决了“读-写”冲突,实现了非阻塞读。但如果两个事务同时执行 UPDATE 操作修改同一行数据,即 写-写(Write-Write&am…...

基于MAX78000的医疗紧急呼叫系统:边缘AI与低功耗设计实战
1. 项目概述与核心价值大家好,我是Victor Hugo,一名电子工程师。今天我想和大家分享一个我最近完成并参与设计竞赛的项目:一个基于MAX78000 FTHR开发板的医疗紧急呼叫辅助系统。这个项目的核心,不是从零开始造一个新轮子ÿ…...
)
别再死磕USB HID了!用ESP32的Arduino框架手把手教你实现蓝牙鼠标键盘(附完整代码)
ESP32蓝牙HID实战:零基础打造自定义键盘鼠标 手里那块吃灰的ESP32开发板终于能派上用场了!上周我用它做了个无线演示控制器,在会议室里走着就能翻PPT,同事们都问是怎么实现的。其实秘诀就在于ESP32的蓝牙HID功能——不需要任何USB…...

Codex使用API Key授权无法使用插件?
小伙伴们,大家好,我是小溪,见字如面。对于没有ChatGPT账号的小伙伴来说,虽然可以通过API Key授权的方式使用Codex桌面端,但是会有一些限制。比如无法使用插件功能,无法使用Codex移动端进行远程控制等。为了…...