【仿真】ruckig在线轨迹生成器示例
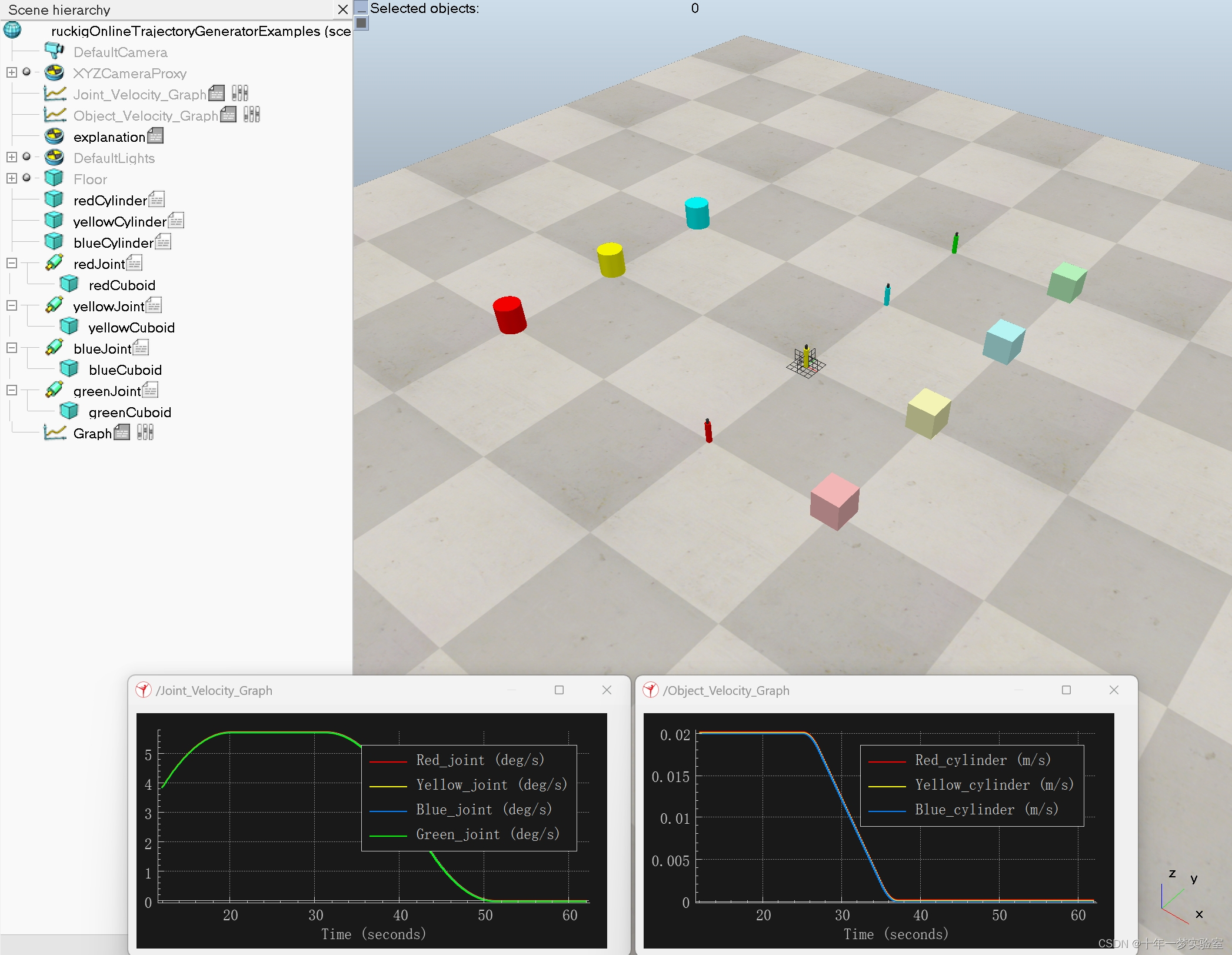
该场景说明了使用 CoppeliaSim 中提供的 Ruckig 在线轨迹生成功能的各种方法:
1. 在线程脚本内使用单个阻塞函数(红色)
2. 在线程脚本中使用多个非阻塞函数(黄色)
3. 在非线程脚本中使用多个非阻塞函数(蓝色)
4.使用关节回调函数(绿色)
-- 红色圆柱体 -- 线程化子脚本,使用sim.moveToPose:
-- 引入sim库
sim = require 'sim'-- Threaded child script, using sim.moveToPose:
-- 线程化子脚本,使用sim.moveToPose:function sysCall_init()-- 获取当前对象句柄h = sim.getObject('.')-- 获取速度图形对象句柄graph = sim.getObject('/Object_Velocity_Graph')-- 创建图形流stream = sim.addGraphStream(graph, 'Red cylinder', 'm/s', 0, {1, 0, 0})-- 设置图形流的变换 对图形流进行原始类型的变换,不进行缩放,但在垂直方向上偏移了0.0002个单位。-- graph: 图形对象的句柄,表示图形流所属的图形对象。-- stream: 图形流的句柄,表示要设置变换的图形流。-- sim.stream_transf_raw: 表示变换的类型,这里使用原始类型。-- 1: 表示缩放比例的因子,这里为1,表示不进行缩放。-- 0.0002: 表示平移的偏移量,这里设置为0.0002,表示在图形流上方偏移0.0002个单位。sim.setGraphStreamTransformation(graph, stream, sim.stream_transf_raw, 1, 0.0002)
endfunction sysCall_sensing()-- 获取对象速度的第三个分量(在z轴上的速度)sim.setGraphStreamValue(graph, stream, sim.getObjectVelocity(h)[3])--获取对象在Z方向速度
endfunction cb(tr, vel, accel, handle)-- 设置对象的姿态sim.setObjectPose(handle, tr)
endfunction sysCall_thread()-- 定义最大速度local maxVel = {0.02, 0.02, 0.02, 0.2} -- vx, vy, vz in m/s, Vtheta is rad/s-- 定义最大加速度local maxAccel = {0.002, 0.002, 0.002, 0.02} -- ax, ay, az in m/s^2, Atheta is rad/s^2-- 定义最大加加速度(在RML类型2下被忽略,即无穷大)local maxJerk = {0.001, 0.001, 0.001, 0.01} -- is ignored (i.e. infinite) with RML type 2-- 获取起始姿态local startTr = sim.getObjectPose(h)-- 复制起始姿态作为目标姿态local goalTr = sim.copyTable(startTr)-- 将目标姿态的z分量增加0.5goalTr[3] = goalTr[3] + 0.5-- 使用sim.moveToPose移动到目标姿态 使机器人从当前姿态 (startTr) 移动到目标姿态 (goalTr),在移动过程中受到了速度、加速度和加加速度的限制,并在运动完成后调用回调函数 cb 来设置对象的姿态。-- -1: 表示移动的方式。在这里,-1 表示使用默认的移动方式,即线性插值。-- startTr: 表示起始姿态,即机器人当前的姿态。-- maxVel: 表示最大速度的限制,是一个包含四个元素的表,分别对应 x、y、z 方向的线速度和绕姿态的角速度。-- maxAccel: 表示最大加速度的限制,同样是一个包含四个元素的表,分别对应 x、y、z 方向的线加速度和绕姿态的角加速度。-- maxJerk: 表示最大加加速度的限制,同样是一个包含四个元素的表,但在这里被忽略,因为 RML (Robotics Motion Library) 类型 2 下其值被视为无穷大。-- goalTr: 表示目标姿态,即机器人要达到的目标位置和姿态。-- cb: 表示在运动完成后的回调函数,即运动结束后会调用此函数,这里是 cb(tr, vel, accel, handle)。-- h: 表示机器人对象的句柄,即要执行移动操作的对象。sim.moveToPose(-1, startTr, maxVel, maxAccel, maxJerk, goalTr, cb, h)
end
-- 红色关节 -- 线程化子脚本,使用sim.moveToConfig:
-- 引入sim库
sim = require 'sim'-- Threaded child script, using sim.moveToConfig:
-- 线程化子脚本,使用sim.moveToConfig:function sysCall_init()-- 获取当前对象句柄h = sim.getObject('.')-- 获取关节速度图形对象句柄graph = sim.getObject('/Joint_Velocity_Graph')-- 创建图形流stream = sim.addGraphStream(graph, 'Red joint', 'deg/s', 0, {1, 0, 0})-- 设置图形流的变换sim.setGraphStreamTransformation(graph, stream, sim.stream_transf_raw, 1, 0.02)
endfunction sysCall_sensing()-- 获取关节速度并将其转换为度/秒sim.setGraphStreamValue(graph, stream, sim.getJointVelocity(h) * 180 / math.pi)
endfunction cb(config, vel, accel, handle)-- 设置关节的位置sim.setJointPosition(handle, config[1])
endfunction sysCall_thread()-- 定义最大关节速度maxVel = 0.1 -- 弧度/秒-- 定义最大关节加速度maxAccel = 0.01 -- 弧度/秒^2-- 定义最大关节加加速度maxJerk = 0.001 -- 弧度/秒^3-- 移动到目标关节配置 使机器人的第一个关节从当前位置移动到目标位置0弧度,并受到了关节速度、关节加速度和关节加加速度的限制,在运动完成后调用回调函数 cb 来设置关节的位置。-- -1: 表示移动的方式。在这里,-1 表示使用默认的移动方式,即线性插值。-- {0}: 表示目标关节的配置,这里是一个包含一个元素的表,表示第一个关节的目标位置为0弧度。-- nil, nil: 表示不设置目标速度和目标加速度。-- {maxVel}: 表示最大关节速度的限制,是一个包含一个元素的表,表示第一个关节的最大速度。-- {maxAccel}: 表示最大关节加速度的限制,是一个包含一个元素的表,表示第一个关节的最大加速度。-- {maxJerk}: 表示最大关节加加速度的限制,是一个包含一个元素的表,表示第一个关节的最大加加速度。-- {179 * math.pi / 180}: 表示目标关节的位置范围,这里设置为179度转换为弧度。-- {0}: 表示不设置目标关节的速度。-- cb: 表示在运动完成后的回调函数,即运动结束后会调用此函数,这里是 cb(config, vel, accel, handle)。-- h: 表示机器人对象的句柄,即要执行移动操作的对象。sim.moveToConfig(-1, {0}, nil, nil, {maxVel}, {maxAccel}, {maxJerk}, {179 * math.pi / 180}, {0}, cb, h)
end
-- 黄色圆柱 -- 线程化子脚本,使用sim.ruckigPos和sim.ruckigStep:
-- 引入sim库
sim = require 'sim'-- Threaded child script, using sim.ruckigPos and sim.ruckigStep:
-- 线程化子脚本,使用sim.ruckigPos和sim.ruckigStep:function sysCall_init()-- 获取当前对象句柄h = sim.getObject('.')-- 获取速度图形对象句柄graph = sim.getObject('/Object_Velocity_Graph')-- 创建图形流stream = sim.addGraphStream(graph, 'Yellow cylinder', 'm/s', 0, {1, 1, 0})-- 设置图形流的变换sim.setGraphStreamTransformation(graph, stream, sim.stream_transf_raw, 1, 0.0001)
endfunction sysCall_sensing()-- 获取对象速度的第三个分量(在z轴上的速度)sim.setGraphStreamValue(graph, stream, sim.getObjectVelocity(h)[3])
endfunction sysCall_thread()-- 获取对象当前位置local p = sim.getObjectPosition(h)-- 构建当前位置、速度、加速度信息的表local currentPosVelAccel = {p[1], p[2], p[3], 0, 0, 0, 0, 0, 0}-- 定义最大速度、加速度、加加速度信息的表local maxVelAccelJerk = {0.02, 0.02, 0.02, 0.002, 0.002, 0.002, 0.001, 0.001, 0.001} -- vx, vy, vz in m/s, ax, ay, az in m/s^2, jx, jy, jz is ignored (i.e. infinite) with RML type 2-- 定义目标位置和速度信息的表local targetPosVel = {p[1], p[2], p[3] + 0.5, 0, 0, 0} -- x, y, z in m, vx, vy, vz in m/s-- 创建Ruckig对象并初始化 创建一个用于进行三维运动规划的Ruckig对象,并初始化其参数。-- 3: 表示运动的维度,这里为3,表示是三维运动。-- 0.0001: 表示最小步长,即运动规划的最小时间间隔。-- -1: 表示运动类型。在这里,-1 表示使用默认的运动类型,即 RML (Robotics Motion Library) 类型 2。-- currentPosVelAccel: 表示当前位置、速度、加速度信息的表,包含9个元素,依次是x、y、z位置,线速度,角速度,线加速度,角加速度。-- maxVelAccelJerk: 表示最大速度、加速度、加加速度信息的表,包含9个元素,依次是x、y、z方向的最大速度、加速度和加加速度。-- {1, 1, 1}: 表示是否考虑每个维度的运动限制,这里都设置为1表示考虑所有维度的运动限制。-- targetPosVel: 表示目标位置和速度信息的表,包含6个元素,依次是x、y、z位置,线速度,角速度,线加速度。local rmlObject = sim.ruckigPos(3, 0.0001, -1, currentPosVelAccel, maxVelAccelJerk, {1, 1, 1}, targetPosVel)-- 启用步进模式local lb = sim.setStepping(true)result = 0while result == 0 do-- 在每个模拟步长内执行Ruckig运动规划的一步result, newPosVelAccel = sim.ruckigStep(rmlObject, sim.getSimulationTimeStep())if result ~= -1 then-- 更新对象的位置sim.setObjectPosition(h, newPosVelAccel)end-- 推进仿真sim.step()end-- 恢复仿真步进模式状态sim.setStepping(lb)-- 移除Ruckig对象sim.ruckigRemove(rmlObject)
end--黄色关节 -- 线程化子脚本,使用sim.ruckigPos和sim.ruckigStep:
-- 引入sim库
sim = require 'sim'-- Threaded child script, using sim.ruckigPos and sim.ruckigStep:
-- 线程化子脚本,使用sim.ruckigPos和sim.ruckigStep:function sysCall_init()-- 获取当前对象句柄h = sim.getObject('.')-- 获取关节速度图形对象句柄graph = sim.getObject('/Joint_Velocity_Graph')-- 创建图形流stream = sim.addGraphStream(graph, 'Yellow joint', 'deg/s', 0, {1, 1, 0})-- 设置图形流的变换sim.setGraphStreamTransformation(graph, stream, sim.stream_transf_raw, 1, 0.01)
endfunction sysCall_sensing()-- 获取关节速度并将其转换为度/秒sim.setGraphStreamValue(graph, stream, sim.getJointVelocity(h) * 180 / math.pi)
endfunction sysCall_thread()-- 定义最大关节速度maxVel = 0.1 -- 弧度/秒-- 定义最大关节加速度maxAccel = 0.01 -- 弧度/秒^2-- 定义最大关节加加速度maxJerk = 0.001 -- 弧度/秒^3-- 创建Ruckig对象并初始化 创建一个用于进行单轴关节运动规划的Ruckig对象,并初始化其参数。-- 1: 表示运动的维度,这里为1,表示是单轴运动(关节运动)。-- 0.0001: 表示最小步长,即运动规划的最小时间间隔。-- -1: 表示运动类型。在这里,-1 表示使用默认的运动类型,即 RML (Robotics Motion Library) 类型 2。-- {0, 0, 0}: 表示当前位置、速度、加速度信息的表,包含3个元素,依次是关节的当前位置、速度和加速度。-- {maxVel, maxAccel, maxJerk}: 表示最大速度、加速度、加加速度信息的表,包含3个元素,依次是关节的最大速度、加速度和加加速度。-- {1}: 表示是否考虑每个维度的运动限制,这里设置为1表示考虑所有维度的运动限制。-- {179 * math.pi / 180, 0, 0}: 表示目标位置、速度、加速度信息的表,包含3个元素,依次是关节的目标位置、速度和加速度。这里将179度转换为弧度。rmlObject = sim.ruckigPos(1, 0.0001, -1, {0, 0, 0}, {maxVel, maxAccel, maxJerk}, {1}, {179 * math.pi / 180, 0, 0})-- 启用步进模式local lb = sim.setStepping(true)result = 0while result == 0 do-- 在每个模拟步长内执行Ruckig运动规划的一步result, newPosVelAccel = sim.ruckigStep(rmlObject, sim.getSimulationTimeStep())if result ~= -1 then-- 更新关节的位置sim.setJointPosition(h, newPosVelAccel[1]) -- 或者根据关节模式使用 sim.setJointTargetPositionend-- 推进仿真sim.step()end-- 恢复仿真步进模式状态sim.setStepping(lb)-- 移除Ruckig对象sim.ruckigRemove(rmlObject)
end--蓝色圆柱体 -- 非线程化子脚本,使用sim.ruckigPos和sim.ruckigStep:
function sysCall_init()-- 获取当前对象句柄h = sim.getObject('.')-- 获取速度图形对象句柄graph = sim.getObject('/Object_Velocity_Graph')-- 创建图形流stream = sim.addGraphStream(graph, 'Blue cylinder', 'm/s', 0, {0, 0.5, 1})-- 获取对象当前位置local p = sim.getObjectPosition(h)-- 构建当前位置、速度、加速度信息的表local currentPosVelAccel = {p[1], p[2], p[3], 0, 0, 0, 0, 0, 0}-- 定义最大速度、加速度、加加速度信息的表local maxVelAccelJerk = {0.02, 0.02, 0.02, 0.002, 0.002, 0.002, 0.001, 0.001, 0.001} -- vx, vy, vz in m/s, ax, ay, az in m/s^2, jx, jy, jz is ignored (i.e. infinite) with RML type 2-- 定义目标位置和速度信息的表local targetPosVel = {p[1], p[2], p[3] + 0.5, 0, 0, 0} -- x, y, z in m, vx, vy, vz in m/s-- 创建Ruckig对象并初始化rmlObject = sim.ruckigPos(3, 0.0001, -1, currentPosVelAccel, maxVelAccelJerk, {1, 1, 1}, targetPosVel)
endfunction sysCall_sensing()-- 获取对象速度的第三个分量(在z轴上的速度)sim.setGraphStreamValue(graph, stream, sim.getObjectVelocity(h)[3])
endfunction sysCall_actuation()-- 如果Ruckig对象存在,则执行一步运动规划if rmlObject thenlocal result, newPosVelAccel = sim.ruckigStep(rmlObject, sim.getSimulationTimeStep())-- 如果运动规划成功,则更新对象的位置if result ~= -1 thensim.setObjectPosition(h, newPosVelAccel)end-- 如果运动规划完成或出错,则移除Ruckig对象if result == 1 or result == -1 thensim.ruckigRemove(rmlObject)rmlObject = nilendend
endfunction sysCall_cleanup()-- 在清理阶段,确保移除Ruckig对象if rmlObject thensim.ruckigRemove(rmlObject)end
end--蓝色关节 -- 非线程化子脚本,使用sim.ruckigPos和sim.ruckigStep:
function sysCall_init()-- 获取当前关节对象句柄h = sim.getObject('.')-- 获取关节速度图形对象句柄graph = sim.getObject('/Joint_Velocity_Graph')-- 创建图形流stream = sim.addGraphStream(graph, 'Blue joint', 'deg/s', 0, {0, 0.5, 1})-- 定义最大关节速度maxVel = 0.1 -- 弧度/秒-- 定义最大关节加速度maxAccel = 0.01 -- 弧度/秒^2-- 定义最大关节加加速度maxJerk = 0.001 -- 弧度/秒^3-- 创建Ruckig对象并初始化rmlObject = sim.ruckigPos(1, 0.0001, -1, {0, 0, 0}, {maxVel, maxAccel, maxJerk}, {1}, {179 * math.pi / 180, 0, 0})
endfunction sysCall_sensing()-- 获取关节速度并将其转换为度/秒sim.setGraphStreamValue(graph, stream, sim.getJointVelocity(h) * 180 / math.pi)
endfunction sysCall_actuation()-- 如果Ruckig对象存在,则执行一步运动规划if rmlObject thenlocal result, newPosVelAccel = sim.ruckigStep(rmlObject, sim.getSimulationTimeStep())-- 如果运动规划成功,则更新关节的位置if result ~= -1 thensim.setJointPosition(h, newPosVelAccel[1]) -- 或者根据关节模式使用 sim.setJointTargetPositionend-- 如果运动规划完成或出错,则移除Ruckig对象if result == 1 or result == -1 thensim.ruckigRemove(rmlObject)rmlObject = nilendend
endfunction sysCall_cleanup()-- 在清理阶段,确保移除Ruckig对象if rmlObject thensim.ruckigRemove(rmlObject)end
end--绿色关节 -- 线程化子脚本,使用sim.moveToConfig:
function sysCall_init()-- 获取当前关节对象句柄h = sim.getObject('.')-- 获取关节速度图形对象句柄graph = sim.getObject('/Joint_Velocity_Graph')-- 创建图形流stream = sim.addGraphStream(graph, 'Green joint', 'deg/s', 0, {0, 1, 0})-- 设置图形流的变换sim.setGraphStreamTransformation(graph, stream, sim.stream_transf_raw, 1, -0.01)
endfunction sysCall_sensing()-- 获取关节速度并将其转换为度/秒sim.setGraphStreamValue(graph, stream, sim.getJointVelocity(h) * 180 / math.pi)
endfunction sysCall_thread()-- 定义最大关节速度maxVel = 0.1 -- 弧度/秒-- 定义最大关节加速度maxAccel = 0.01 -- 弧度/秒^2-- 定义最大关节加加速度maxJerk = 0.001 -- 弧度/秒^3-- 通过设置关节的目标位置,触发关节的回调函数sim.setJointTargetPosition(h, 179 * math.pi / 180, {maxVel, maxAccel, maxJerk})
endfunction sysCall_joint(inData)-- 用户可以在这里自由实现回调函数-- 由于该函数没有返回任何值,调用将被重定向到场景层次结构的上层-- 并最终由主脚本中的默认关节回调函数处理
end相关文章:
【仿真】ruckig在线轨迹生成器示例
该场景说明了使用 CoppeliaSim 中提供的 Ruckig 在线轨迹生成功能的各种方法: 1. 在线程脚本内使用单个阻塞函数(红色) 2. 在线程脚本中使用多个非阻塞函数(黄色) 3. 在非线程脚本中使用多个非阻塞函数(…...

LeetCode 面试题 16.22. 兰顿蚂蚁
文章目录 一、题目二、C# 题解 一、题目 一只蚂蚁坐在由白色和黑色方格构成的无限网格上。开始时,网格全白,蚂蚁面向右侧。每行走一步,蚂蚁执行以下操作。 (1) 如果在白色方格上,则翻转方格的颜色,向右(顺时针)转 90 度…...
Docker安装详细步骤及相关环境安装配置(mysql、jdk、redis、自己的私有仓库Gitlab 、C和C++环境以及Nginx服务代理)
目录 一、从空白系统中克隆Centos7系统 二、使用xshell连接docker_tigerhhzz虚拟机编辑 三、在CentOS7基础上安装Docker容器 四、在Docker中进行安装Portainer 4.1、在Docker中安装MySQL 4.2、在Docker中安装JDK8,安装Java环境 4.3、Docker安装redis&#…...
科研学习|研究方法——Python计量Logit模型
一、离散选择模型 莎士比亚曾经说过:To be, or not to be, that is the question,这就是典型的离散选择模型。如果被解释变量时离散的,而非连续的,称为“离散选择模型”。例如,消费者在购买汽车的时候通常会比较几个不…...
灵活运用Vue指令:探究v-if和v-for的使用技巧和注意事项
🎬 江城开朗的豌豆:个人主页 🔥 个人专栏 :《 VUE 》 《 javaScript 》 📝 个人网站 :《 江城开朗的豌豆🫛 》 ⛺️ 生活的理想,就是为了理想的生活 ! 目录 ⭐ 专栏简介 📘 文章引言 一、作…...

nvidia-docker部署pytorch服务【GPU工作站】
文章目录 一、安装 Docker二、安装 NVIDIA Container Toolkit三、宿主机安装 cuda 和 nvidia-driver四、测试一、安装 Docker 可以参考这篇文章 https://blog.csdn.net/weixin_43721000/article/details/124237932 二、安装 NVIDIA Container Toolkit 参考nvidia官方 https:/…...
单链表的实现
CSDN主页:醋溜马桶圈_C语言进阶,初始C语言,数据结构-CSDN博客 Gitee主页:mnxcc (mnxcc) - Gitee.com 专栏:数据结构_醋溜马桶圈的博客-CSDN博客 目录 1.认识单链表 2.创建单链表 3.单链表的操作 3.1打印单链表 3.2开辟新空间 3.3尾插 3.4头插…...
)
【python】面向对象(类型定义魔法方法)
目录 一、引言 二、类型定义 1、什么是类型的定义? 2、案例 三、魔法方法 1、什么是魔法方法 2、基础部分 3、比较操作 4、容器类型 5、属性管理 6、封装 7、方法拓展 8、继承 9、多态 一、引言 Python是一种面向对象的语言,它支持类&#…...
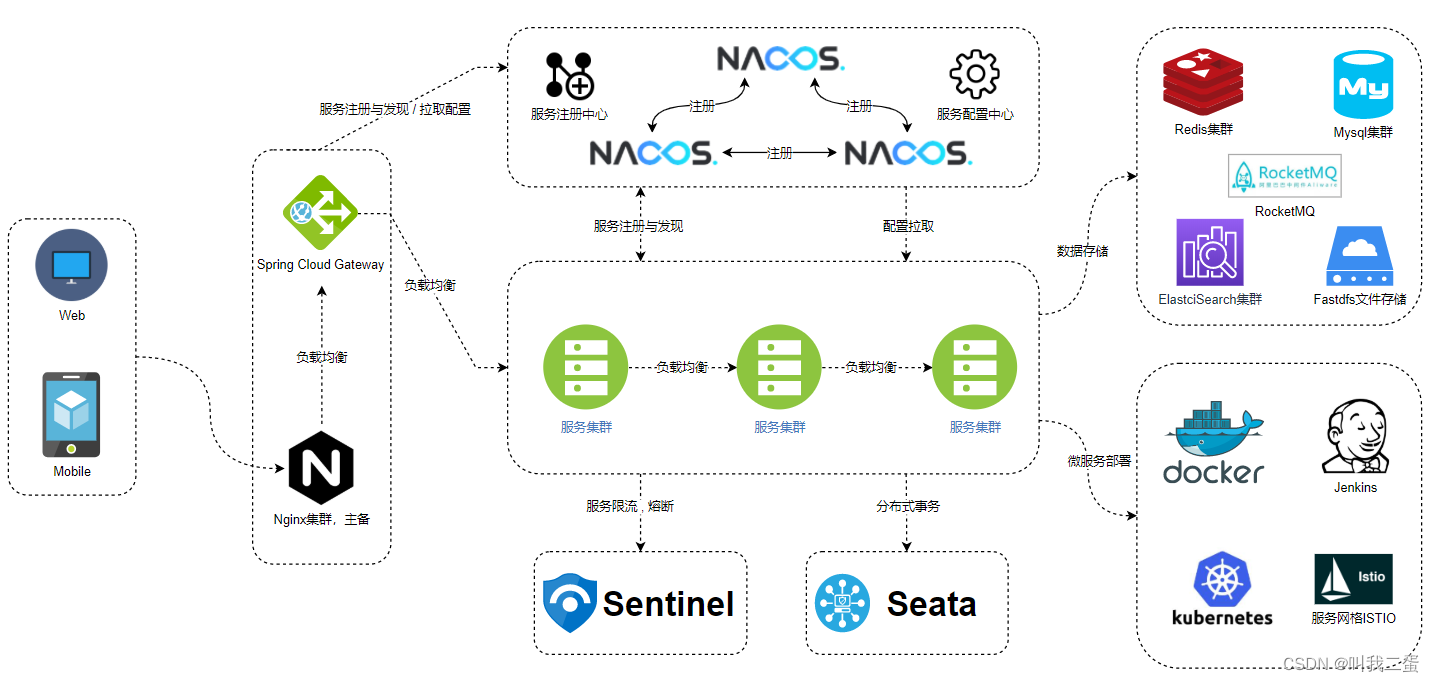
1.微服务与SpringCloud
微服务和SpringCloud 文章目录 微服务和SpringCloud1.什么是微服务2.SpringCloud3. 微服务 VS SpringCloud4. SpringCloud 组件5.参考文档6.版本要求 1.什么是微服务 微服务是将一个大型的、单一的应用程序拆分成多个小型服务,每个服务实现特定的业务功能ÿ…...
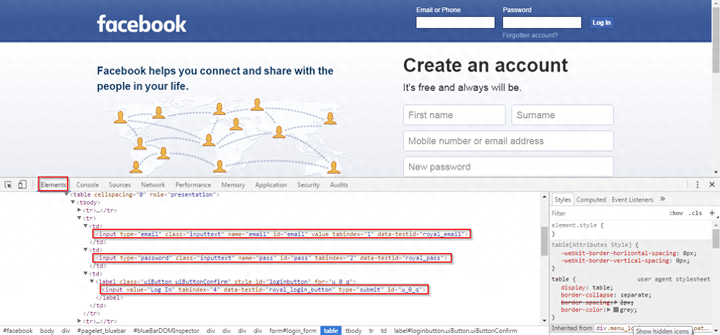
【2023全网最全最火】Selenium WebDriver教程(建议收藏)
在本教程中,我将向您介绍 Selenium Webdriver,它是当今市场上使用最广泛的自动化测试框架。它是开源的,可与所有著名的编程语言(如Java、Python、C#、Ruby、Perl等)一起使用,以实现浏览器活动的…...
)
dimp 导入dmp文件报错:无效的模式名(DM8:达梦数据库)
dimp 导入dmp文件报错:无效的模式名-DM8:达梦数据库 环境介绍1 搭建A1 数据库52361.1 A1数据库5236创建模式名,表,测试数据1.2 从A1数据库5236导出dmp文件 2 搭建A2数据库52372.1 创建 数据用户ABC2311152.2 在A2 数据库5237 导入DMP(报错无效的模式名)2.3 使用REMAP_SCHEMAABC…...
)
宿主机无法连接docker里的redis问题解决(生产环境慎用)
宿主机无法连接docker里的redis问题解决(生产环境慎用) 问题描述解决方案 问题描述 1.连接超时 2.连接能连上但马上断开并报错 3.提示保护模式什么的 (error) DENIED Redis is running in protected mode because protected mode is enabled链接redis …...
给女朋友开发个小程序低价点外卖吃还能赚钱
前言 今天又是无聊的一天,逛了下GitHub,发现一个库里面介绍美团饿了吗外卖红包外卖优惠券,先领红包再下单。外卖红包优惠券,cps分成,别人领红包下单,你拿佣金。哇靠,那我岂不是可以省钱还可以赚钱,yyds。。。。想想都美好哈哈哈!!! 回到正题,这个是美团饿了么分销…...
外贸客户管理系统是什么?推荐的管理软件?
外贸客户管理系统哪个好用?海洋建站如何选管理系统? 外贸客户管理系统,是一款专为外贸企业设计的客户关系管理系统,旨在帮助外贸企业建立与维护客户关系,提高客户满意度和忠诚度,提升企业业绩。海洋建站将…...
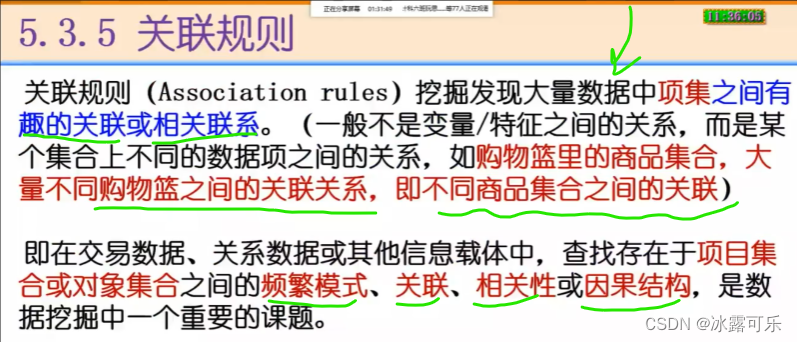
数据挖掘:分类,聚类,关联关系,回归
数据挖掘: 2022找工作是学历、能力和运气的超强结合体,遇到寒冬,大厂不招人,可能很多算法学生都得去找开发,测开 测开的话,你就得学数据库,sql,oracle,尤其sql要学&…...

力扣labuladong一刷day10一网打尽股票买卖问题共6题
力扣labuladong一刷day10股票买卖问题共6题 一、121. 买卖股票的最佳时机 题目链接:https://leetcode.cn/problems/best-time-to-buy-and-sell-stock/ 思路:只能买入1次,定义dp[i][0]数组表示第i天持有股票时手中的最大金额 数,…...

微信小程序手写table表格
wxml <view class"table"><view class"tr bg-w"><view class"th">张三</view><view class"th" style"color: #409eff;">李四</view><view class"th ">王五</view&…...
UE5 - UI Material Lab 学习笔记
1、学习资料收集 UI Material Lab : https://www.unrealengine.com/marketplace/zh-CN/product/ui-material-lab 视频1:https://www.bilibili.com/video/BV1Hm4y1t7Kn/?spm_id_from333.337.search-card.all.click&vd_source707ec8983cc32e6e065d5496a7f79ee6 视…...

oracle删除重复的数据
去除重复数据: group by 对要比对的字段进行查询是否重复 CREATE TABLE 临时表 AS (select 字段1,字段2,count(*) from 表名 group by 字段1,字段2 having count(*) > 1) 上面这句话就是建立了临时表,并将查询到的数据插入其中。 下面就可以进行…...

Python中的并发编程是什么,如何使用Python进行并发编程?
Python中的并发编程是指使用多线程或多进程来同时执行多个任务。这样可以提高程序的执行效率,特别是在处理I/O密集型任务时。Python提供了多种方式来实现并发编程,如threading模块和multiprocessing模块。 使用Python进行并发编程的方法如下:…...

小说下载器终极指南:一站式解决100+网站小说保存难题
小说下载器终极指南:一站式解决100网站小说保存难题 【免费下载链接】novel-downloader 一个可扩展的通用型小说下载器。 项目地址: https://gitcode.com/gh_mirrors/no/novel-downloader 在数字阅读时代,你是否曾因小说突然下架、网站404或网络中…...

HarmonyOS ArkTS DateUtil 日期增减与日历计算完整指南
文章目录 背景一、引言二、日期增减方法详解使用示例 三、日历计算方法详解四、Demo 演示:日期增减结果展示五、Demo 演示:月历视图完整实现六、日历视图关键点解析为什么要填充前置空格?getLastDayOfMonth 的实现技巧 七、小结 背景 近期发现…...

HiveWE终极指南:快速掌握魔兽争霸III现代化地图编辑器
HiveWE终极指南:快速掌握魔兽争霸III现代化地图编辑器 【免费下载链接】HiveWE A Warcraft III world editor. 项目地址: https://gitcode.com/gh_mirrors/hi/HiveWE 还在为传统魔兽争霸III地图编辑器缓慢的加载速度和复杂的操作界面而烦恼吗?Hiv…...

网飞成立 AI 动画工作室,开启流媒体“原生 AI 制片时代”,中外布局逻辑有何不同?
1. Netflix“偷跑”在影视巨头关于 AIGC 的军备竞赛中,Netflix 再次加速。据外媒 TheVerge 报道,网飞于今年 3 月成立了名为 "INKubator" 的工作室,这是全球流媒体巨头中首个以生成式人工智能为核心的动画制作部门。此动作引发全球…...

告别多头对接!DMXAPI 为企业打造国产大模型 “统一入口”
一、企业 AI 落地的普遍痛点:被接口和平台消耗的成本在企业数字化转型的浪潮中,AI 大模型已经成为标配,但很多企业在落地时,都会陷入一个共同的困境:为了满足不同业务场景的需求,需要同时对接 DeepSeek、阿…...
提升你的图表专业度?)
从科研图表到商业报表:如何用Matplotlib的legend()提升你的图表专业度?
从科研图表到商业报表:如何用Matplotlib的legend()提升你的图表专业度? 在数据驱动的决策时代,图表不仅是科研论文中的证据载体,更是商业汇报中的说服工具。我曾见证一位生物统计学家将同一组临床试验数据呈现给三种不同受众&…...

Nacos CVE-2021-29441漏洞深度解析:User-Agent绕过与鉴权失效
1. 这个漏洞不是“改个Header就能登录”,而是Nacos鉴权体系的一道裂缝CVE-2021-29441这个编号在Nacos社区里曾被轻描淡写地归为“低危”,直到我接手一个金融客户线上告警——他们的Nacos集群在凌晨三点被批量创建了37个高权限用户,所有操作日…...

ZYNQ中断避坑指南:PL端信号线如何正确‘连线’到PS端处理函数?
ZYNQ中断系统深度解析:从硬件信号到软件响应的全链路实践 在嵌入式系统开发中,中断处理是实时响应的核心机制。对于ZYNQ这种集成了ARM处理器(PS)和可编程逻辑(PL)的异构计算平台,其中断系统既有传统处理器的特性,又具备FPGA灵活定…...

基于CNN的食双星光变曲线自动化参数初估模型EBOP MAVEN
1. 项目概述与核心价值在恒星天体物理领域,食双星系统一直扮演着“宇宙实验室”的关键角色。通过分析两颗恒星相互绕转时周期性相互遮挡产生的光变曲线,我们可以像解谜一样,精确反演出恒星的质量、半径、轨道倾角等基本物理参数。这些参数是构…...

通过Taotoken用量看板清晰追踪各模型的Token消耗情况
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过Taotoken用量看板清晰追踪各模型的Token消耗情况 对于依赖大模型API进行开发的个人或团队而言,成本控制与预算规划…...