释放机器人潜力,INDEMIND深耕底层技术
市场转暖,但攘外需要同时安内。
市场降温之后,正迎来拐点
疫情之后,经济逐渐下行,服务机器人的“好日子”也随之结束,整个行业都在动荡中经历渡劫。根据TE智库报告显示,从2022年开始,我国服务机器人产量开始明显放缓,一直到2022年12月都处于同比下滑的状态。一时间,企业裁员、资本退场,成为了行业的负面热词,服务机器人真的只是昙花一现?
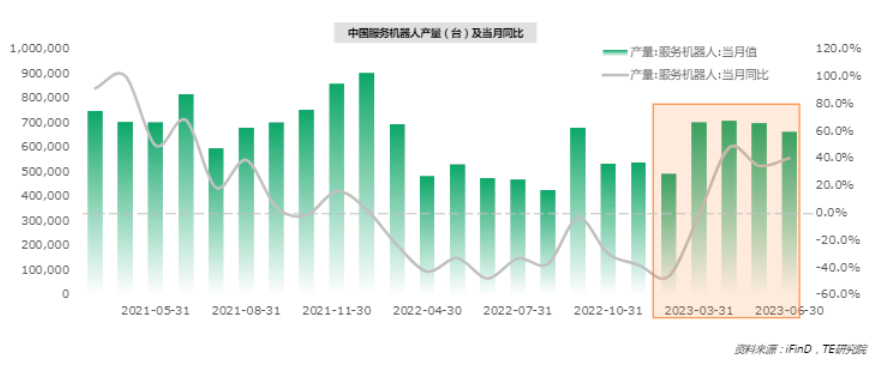
答案显然不是,无论是短期,还是长期,机器人的潜力都十分巨大。短期来看,根据TE智库报告显示,经历了连续12个月的下滑后,在今年4月我国服务机器人产量止跌并实现同比增长47.6%,到今年6月我国服务机器人产量为662658台, 同比增长40%,机器人需求向好的拐点已经出现。
长期来看,现阶段的动荡虽然导致市场降温,但也挤出了近几年揠苗助长的泡沫,为未来稳定增长奠定了基础。随着老龄化问题加剧,加之中青年逐渐远离低端服务业,这意味着我国有着庞大的市场需求。目前,服务机器人的渗透仍然极低,我国服务机器人市场还处在起步阶段,服务机器人只搭载在一些标准化程度较高的场景,随着服务机器人的能力不断展现,未来将会有更多用户搭载服务机器人。
释放机器人潜力,还需解决现有“硬伤”
随着部署量的增加,机器人面临的场景复杂度和类型正在与日俱增,这意味着机器人需要更强大的产品力。而从市场调查来看,现有的机器人产品还存在着各种问题,部署周期长、场景适应能力差、避障能力差等。想要真正释放机器人潜力,这些问题亟待解决。
众所周知,作为高技术门槛行业,机器人的开发迭代需要耗费大量时间和资金,以及漫长的市场验证。痛点催生需求,随着产业链逐渐完善,上游的技术供应商们提供了新选择。

自2017年成立以来,INDEMIND坚持深耕视觉导航技术,在机器人的导航、避障、决策、AI交互等关键技术和产品开发方面均有着深层次的积累和经验,针对现有的行业需求,INDEMIND将核心接轨融合研发了一套标准化的商用机器人底层解决方案「商用机器人AI Kit」。该方案以自研的INDEMIND OS Fusion AGI系统为基础,采用以双目立体相机为核心的多传感器融合架构,支持市面上不同品类的主流传感器,满足商用机器人导航定位、智能避障、路径规划、决策交互等核心功能的开发,能够广泛应用于商用清洁、酒店配送、送餐、巡检等商用服务机器人平台。
无需预部署,开机即用
商用机器人在投入使用前均需要现场部署,由厂商的工程师进行SLAM建图、目标点标注、测试等专业操作,往往需要花费大量时间。同时受限于传统marker定位与激光定位的技术局限性,在空间大、吊顶高、光环境复杂的商场、超市等场景中,存在贴码成本高、高空间难贴码、改造空间布局等情况,且容易发生因环境变化定位失准的问题,还会延长部署时间,而后续场景的空间布局一旦发生改变,依然需要工程师重新部署,无论对于厂商还是终端用户,最终落地成本都较高。
而INDEMIND「商用机器人AI Kit」则无需考虑这些问题,基于独有的立体视觉技术,机器人能够实时自主构建地图,做到新机器、新场景无需预部署,开机即用,且变更场景后,机器人也能自主更新地图,无需技术人员参与,大大降低使用成本,这与现有的机器人产品有着天然的区别。
场景自适应,不再担心场景变化
与部署问题类似,以激光雷达为核心的融合导航方案场景适应能力较差,一旦场景发生变化,机器人的作业质量便不可控,甚至需要技术人员重新部署才能使用。
而INDEMIND「商用机器人AI Kit」是采用以视觉为核心的融合导航方案,机器人支持全场景二维地图、三维地图及语义地图自主创建,且能够地图动态实时更新,显著提升机器人的场景适应能力。同时,INDEMIND拥有超过100个使用场景的海量数据,对于清洁、配送、导览、安防等多种工作场景有着深度理解,配合视觉多融合感知技术,能进一步提升机器人的环境自适应能力。
更灵敏、更精准、更智能,机器人避障也能“随心所欲”
目前机器人的避障方案主要是借助激光、ToF、结构光、双目等传感器采集场景内障碍物的点云信息,构建场景栅格地图,然后对障碍物进行避障,此类方案虽然能够满足机器人的避障需求,但也仅仅“刚刚能用”,对于动静态、低矮、悬空障碍物并不能一直有效检测。

INDEMIND商用机器人AI Kit
INDEMIND「商用机器人AI Kit」基于视觉优势,设计了一套系统化的安全决策系统,不仅实现了智能避障,还拥有主动安全功能。机器人能够稳定检测各类障碍物,支持低矮障碍物避障(地插、桌椅底座等);高反障碍物避障(玻璃、镜面等);全高障碍物避障(桌面、警戒线等),保障机器人在复杂环境下安全运行。
INDEMIND商用机器人AI Kit
同时,机器人能够实时检测抛物、行人、快速移动物体等突破情况外,并能够实时进行潜在风险判断(行人等),根据风险分类,提前做出规避策略,实现主动安全。
值得一提的是,「商用机器人AI Kit」相比激光雷达方案,成本下降60-80%,机器人开发成本最低可以下探到2千元以内,包含导航和电池的完整底盘成本则可以下探到5千元以内,显著降低机器人的开发成本和周期。
目前,INDEMIND已和国内外多家巨头客户达成合作,已签署订单超2万台,三年预期订单将超10万台。其中与传统清洁设备厂商ICE合作的中型清洁机器人Cobi18,已在全球十几个国家批量部署,且在欧美市场实现运行零故障。
相关文章:
释放机器人潜力,INDEMIND深耕底层技术
市场转暖,但攘外需要同时安内。 市场降温之后,正迎来拐点 疫情之后,经济逐渐下行,服务机器人的“好日子”也随之结束,整个行业都在动荡中经历渡劫。根据TE智库报告显示,从2022年开始,我国服务…...

【ES6标准入门】JavaScript中的模块Module语法的使用细节:export命令和imprt命令详细使用,超级详细!!!
😁 作者简介:一名大四的学生,致力学习前端开发技术 ⭐️个人主页:夜宵饽饽的主页 ❔ 系列专栏:JavaScript进阶指南 👐学习格言:成功不是终点,失败也并非末日,最重要的是继…...

流量2----2
2...
人工智能发展前景
随着人工智能的快速发展,这个行业对人才的需求也在不断增长。越来越多的有志之士开始关注人工智能,希望通过自学获得相关技能,进而在人工智能领域找到心仪的职业。本文将探讨人工智能职业发展的前景,并为大家提供自学人工智能的途…...
编写程序,要求输入x的值,输出y的值。分别用(1)不嵌套的if语句(2)嵌套的if语句(3)if-else语句(4)switch语句。
编写程序,要求输入x的值,输出y的值。分别用(1)不嵌套的if语句(2)嵌套的if语句(3)if-else语句(4)switch语句。 选择结构是编程语言中常用的一种控制结构&…...

AcWing 4520:质数 ← BFS
【题目来源】https://www.acwing.com/problem/content/4523/【题目描述】 给定一个正整数 X,请你在 X 后面添加若干位数字(至少添加一位数字;添加的数不能有前导0),使得结果为质数,在这个前提下所得的结果应…...

00、计算机视觉入门与调优简介
写在前面 每天更新1篇文章,共更新100篇以上 相关代码会放在gitee上 中间会按进度和反馈安排视频讲解 预计2023-11-11开始推送文章,持续3个月左右 专栏简介 本专栏带你从头开始入门计算机视觉。 内容会比之前写的文章更专业更全面,并且你…...

.L0CK3D来袭:如何保护您的数据免受致命攻击
尊敬的读者: 网络犯罪的威胁日益增长,其中.L0CK3D勒索病毒是一种极具挑战性的数字威胁。为了助您应对这一风险,本文将深入探讨.L0CK3D病毒的狡猾手法、毁灭性影响,提供详实的数据恢复方法,同时为您提供极具实战性的预…...

多媒体ffmpeg学习教程
多媒体ffmpeg 目前比较流行的音视频文件为:MP4 flv m3u8 ffmpeg ffmpeg ffplay ffprobe ffserverffmpeg -i INPUT -vf "split [main][tmp]; [tmp] cropiw:ih/2:0:0, vflip [flip];[main][flip] overlay0:H/2" OUTPUTffmpeg -i 2022.mp4 -vcodec mpeg4 -b:…...
)
SELinux零知识学习十五、SELinux策略语言之客体类别和许可(9)
接前一篇文章:SELinux零知识学习十四、SELinux策略语言之客体类别和许可(8) 一、SELinux策略语言之客体类别和许可 4. 客体类别许可实例 (3)进程客体类别许可 与文件许可不同,许多进程许可没有直接对应到…...
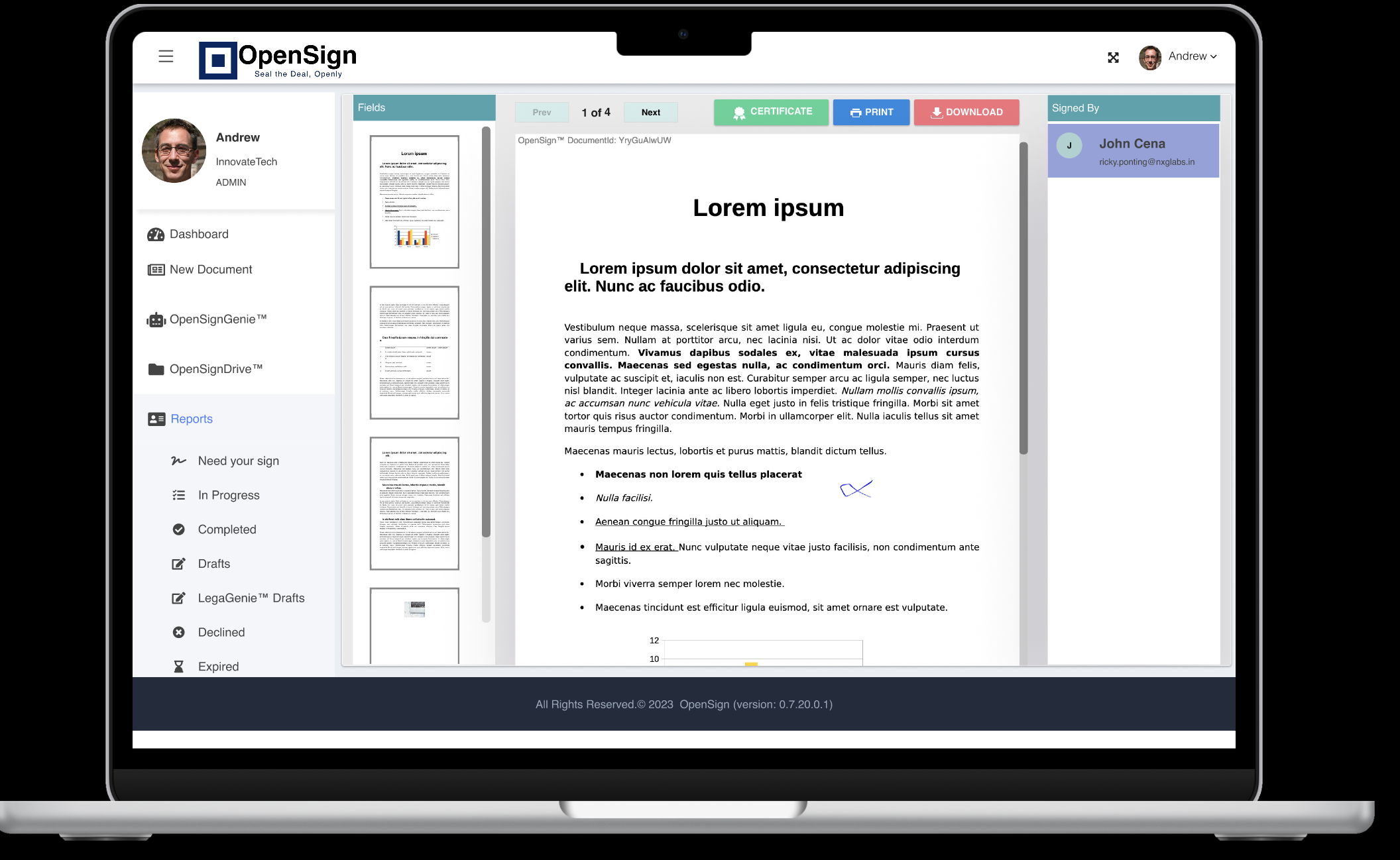
OpenSign:安全可靠的电子签名解决方案 | 开源日报 No.76
microsoft/Web-Dev-For-Beginners Stars: 71.5k License: MIT 这个开源项目是一个为期 12 周的全面课程,由微软云倡导者团队提供。它旨在帮助初学者掌握 JavaScript、CSS 和 HTML 的基础知识。每一节都包括预习和复习测验、详细的书面指南、解决方案、作业等内容。…...

Linux | 进程间通信
目录 前言 一、进程间通信的基本概念 二、管道 1、管道的基本概念 2、匿名管道 (1)原理 (2)测试代码 (3)读写控制相关问题 a、读端关闭 b、写端关闭 c、读快写慢 d、读慢些快 (4&a…...

Vue.js正式环境中配置多个请求的URL
在Vue.js中,你可以在正式环境中配置多个请求的URL,通常使用一些配置文件或者环境变量的方式。下面是一种常见的配置方式: 1. 创建配置文件:在项目的根目录下,创建一个配置文件,比如可以是config.js&#x…...
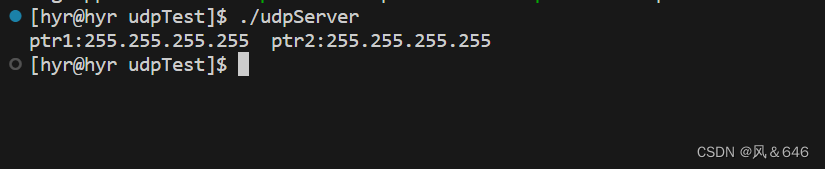
简单的 UDP 网络程序
文章目录: 简单的UDP网络程序服务端创建套接字服务端绑定启动服务器udp客户端本地测试INADDR_ANY 地址转换函数关于 inet_ntoa 简单的UDP网络程序 服务端创建套接字 我们将服务端封装为一个类,当定义一个服务器对象之后,需要立即进行初始化…...

人工智能-深度学习之文本预处理
文本预处理 对于序列数据处理问题, 这样的数据存在许多种形式,文本是最常见例子之一。 例如,一篇文章可以被简单地看作一串单词序列,甚至是一串字符序列。 本节中,我们将解析文本的常见预处理步骤。 这些步骤通常包括…...

【Java 进阶篇】插上翅膀:JQuery 插件机制详解
在前端开发中,JQuery 作为一个广泛应用的 JavaScript 库,为开发者提供了丰富的工具和方法,简化了 DOM 操作、事件处理等繁琐的任务。而在这个庞大的生态系统中,插件机制是 JQuery 的一项重要特性,使得开发者能够轻松地…...

手动编译GDB
手动编译GDB 起因在于使用Clang-14编译C文件并生成调试信息,使用gdb调试时报DWARF相关错误。经检查原因在于虚拟机为Ubuntu 20.04,使用apt下载时官方提供gdb版本为9.2,不支持DWARF5,而Clang-14生成的调试信息是DWARF5版本的。为解决该问题,手…...
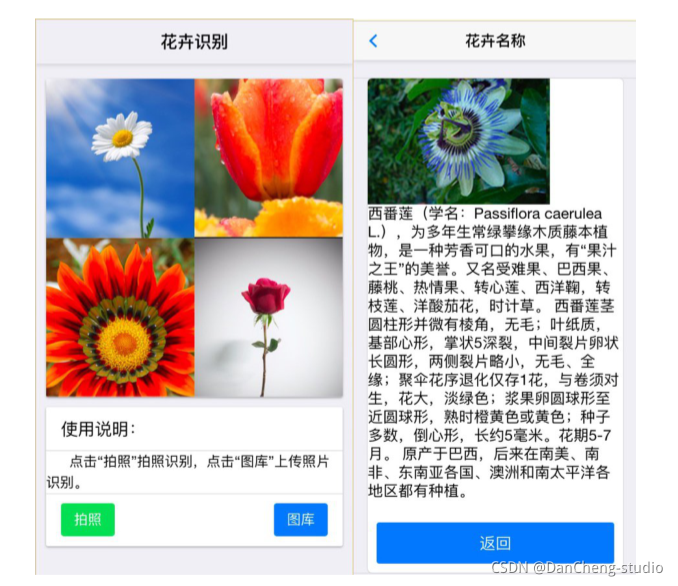
竞赛选题 深度学习花卉识别 - python 机器视觉 opencv
文章目录 0 前言1 项目背景2 花卉识别的基本原理3 算法实现3.1 预处理3.2 特征提取和选择3.3 分类器设计和决策3.4 卷积神经网络基本原理 4 算法实现4.1 花卉图像数据4.2 模块组成 5 项目执行结果6 最后 0 前言 🔥 优质竞赛项目系列,今天要分享的是 &a…...

替换SlowFast中Detectron2为Yolov8
一 需求 FaceBookReserch中SlowFast源码中检测框是用Detectron2进行目标检测,本文想实现用yolov8替换detectron2二 实施方案 首先,yolov8 支持有自定义库ultralytics(仅支持yolov8),安装对应库 pip install ultraly…...

轻量化网络--MobileNet V1
文章目录 depth-wise separable convolutions普通卷积depthwise conconvolutionspointwise convolutions网络结构进一步分析网络训练方式两个重要的超参数Width Multiplier: Thinner ModelsResolution Multiplier: Reduced Representation实验结果消融实验细粒度,高分辨率识别…...
)
科研党福音:Zotero+Green Frog插件一键获取期刊分区与影响因子(附easyScholar密钥配置全流程)
科研文献管理革命:Zotero与Green Frog插件的深度整合实践 作为一名长期浸泡在学术海洋中的研究者,我深知高效文献管理工具的重要性。每天面对数百篇新发表的论文,如何快速识别高质量文献成为决定科研效率的关键因素。传统的手动查询期刊影响因…...

cobalt数据库设计解析:如何平衡性能与数据完整性
cobalt数据库设计解析:如何平衡性能与数据完整性 【免费下载链接】cobalt best way to save what you love 项目地址: https://gitcode.com/GitHub_Trending/cob/cobalt 引言:数据库设计的永恒矛盾 在软件开发领域,数据库设计始终面临…...

终极PDF批量处理指南:如何用PDF Arranger自动化文档操作
终极PDF批量处理指南:如何用PDF Arranger自动化文档操作 【免费下载链接】pdfarranger Small python-gtk application, which helps the user to merge or split PDF documents and rotate, crop and rearrange their pages using an interactive and intuitive gra…...

系统架构设计师常见高频考点总结之数据库
1. 局部数据库缓存1.1. 如何避免单点故障?(高可用设计)只要题目提到“避免单点故障”或“高可靠性”,标准答案只有一套组合拳:冗余(Redundancy):一台不够就两台。热备(Ho…...

终极免费抖音无水印视频下载完整教程:3步快速获取高清素材
终极免费抖音无水印视频下载完整教程:3步快速获取高清素材 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback s…...

FairyGUI在CocosCreator中的高级应用:异步加载、事件处理与性能优化技巧
FairyGUI在CocosCreator中的高阶实战:异步架构设计与性能调优全指南 当你的CocosCreator项目UI复杂度达到临界点时,传统的资源加载和事件处理方式往往会成为性能瓶颈。FairyGUI作为专业UI解决方案,其深度集成能力可以彻底改变这种局面——但真…...

编程技巧:模式切换程序框架
目录 1.模式切换程序框架 2.实现思路 3.模式切换程序框架 4.模式切换每个模式模块化流程 5.代码 Mode1.c Mode2.c Mode3.c Global.c main.c 1.模式切换程序框架 Init:进入模式前,执行一遍,用于初始化工作 Loop:执行完In…...

Zotero Citation插件开发指南:从环境适配到定制优化的全流程实践
Zotero Citation插件开发指南:从环境适配到定制优化的全流程实践 【免费下载链接】zotero-citation Make Zoteros citation in Word easier and clearer. 项目地址: https://gitcode.com/gh_mirrors/zo/zotero-citation 问题发现:学术写作中的引用…...

Neeshck-Z-lmage_LYX_v2多场景落地:LoRA动态加载赋能数字人直播背景实时生成系统
Neeshck-Z-lmage_LYX_v2多场景落地:LoRA动态加载赋能数字人直播背景实时生成系统 1. 项目简介:一个专为本地绘画优化的轻量级工具 如果你对AI绘画感兴趣,特别是想体验国产的Z-Image文生图模型,但又被复杂的部署流程、繁琐的参数…...

Qwen3-VL-8B效果惊艳展示:识别电路图并解释工作原理与元器件作用
Qwen3-VL-8B效果惊艳展示:识别电路图并解释工作原理与元器件作用 1. 视觉语言模型的电路理解突破 Qwen3-VL-8B作为新一代多模态大模型,在电路图识别和理解方面展现出了令人惊艳的能力。传统的文本模型只能处理文字描述,而Qwen3-VL-8B能够直…...