深度学习交通车辆流量分析 - 目标检测与跟踪 - python opencv 计算机竞赛
文章目录
- 0 前言
- 1 课题背景
- 2 实现效果
- 3 DeepSORT车辆跟踪
- 3.1 Deep SORT多目标跟踪算法
- 3.2 算法流程
- 4 YOLOV5算法
- 4.1 网络架构图
- 4.2 输入端
- 4.3 基准网络
- 4.4 Neck网络
- 4.5 Head输出层
- 5 最后
0 前言
🔥 优质竞赛项目系列,今天要分享的是
🚩 **基于深度学习得交通车辆流量分析 **
该项目较为新颖,适合作为竞赛课题方向,学长非常推荐!
🥇学长这里给一个题目综合评分(每项满分5分)
- 难度系数:3分
- 工作量:3分
- 创新点:5分
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate

1 课题背景
在智能交通系统中,利用监控视频进行车流量统计是一个研究热点。交管部门通过实时、准确地采集车流量信息,可以合理分配交通资源、提高道路通行效率,有效预防和应对城市交通拥堵问题。同时随着车辆数量的增加,交通违章现象频出,例如渣土车违规上道、工程车辆违规进入城市主干道、车辆停放在消防通道等,这一系列的交通违规行为给城市安全埋下了巨大隐患。对于交通管理者而言,加强对特定车辆的识别和分类管理尤为重要。然而,在实际监控识别车辆时,相当一部分车辆图像存在图像不全或者遮挡问题,极大降低了监控识别准确率。如何准确识别车辆,是当前车辆检测的重点。
根据实际情况,本文将车辆分为家用小轿车、货车两类进行车辆追踪和速度识别。
2 实现效果
可识别图片视频中的轿车和货车数量,检测行驶速度并实时显示。
关键代码
# 目标检测def yolo_detect(self, im):img = self.preprocess(im)pred = self.m(img, augment=False)[0]pred = pred.float()pred = non_max_suppression(pred, self.conf_thres, self.iou_thres )pred_boxes = []for det in pred:if det is not None and len(det):det[:, :4] = scale_coords(img.shape[2:], det[:, :4], im.shape).round()for *x, conf, cls_id in det:lbl = self.names[int(cls_id)]x1, y1 = int(x[0]), int(x[1])x2, y2 = int(x[2]), int(x[3])pred_boxes.append((x1, y1, x2, y2, lbl, conf))return pred_boxes
3 DeepSORT车辆跟踪
多目标在线跟踪算法 SORT(simple online andrealtime
tracking)利用卡尔曼滤波和匈牙利匹配,将跟踪结果和检测结果之间的IoU作为代价矩阵,实现了一种简单高效并且实用的跟踪范式。但是 SORT
算法的缺陷在于所使用的关联度量(association
metric)只有在状态估计不确定性较低的情况下有效,因此算法执行时会出现大量身份切换现象,当目标被遮挡时跟踪失败。为了改善这个问题,Deep SORT
将目标的运动信息和外观信息相结合作为关联度量,改善目标消失后重新出现导致的跟踪失败问题。
3.1 Deep SORT多目标跟踪算法
跟踪处理和状态估计
Deep SORT
利用检测器的结果初始化跟踪器,每个跟踪器都会设置一个计数器,在卡尔曼滤波之后计数器累加,当预测结果和检测结果成功匹配时,该计数器置为0。在一段时间内跟踪器没有匹配到合适的检测结果,则删除该跟踪器。Deep
SORT 为每一帧中新出现的检测结果分配跟踪器,当该跟踪器连续3帧的预测结果都能匹配检测结果,则确认是出现了新的轨迹,否则删除该跟踪器。
Deep SORT使用 8维状态空间 描述目标的状态和在图像坐标系中的运动信息。
描述目标的状态和在图像坐标系中的运动信息。 表示目标检测框的中心坐标
表示目标检测框的中心坐标 分别表示检测框的宽高比例和高度,
分别表示检测框的宽高比例和高度, 表示前面四个参数在图像坐标中的相对速度。算法使用具有恒定速度模型和线性观测模型的标准卡尔曼滤波器,将检测框参数
表示前面四个参数在图像坐标中的相对速度。算法使用具有恒定速度模型和线性观测模型的标准卡尔曼滤波器,将检测框参数 作为对象状态的直接观测值。
作为对象状态的直接观测值。
分配问题
Deep SORT
结合运动信息和外观信息,使用匈牙利算法匹配预测框和跟踪框。对于运动信息,算法使用马氏距离描述卡尔曼滤波预测结果和检测器结果的关联程度,如公式中:

 分别表示第 j 个检测结果和第 i
分别表示第 j 个检测结果和第 i
个预测结果的状态向量,Si 表示检测结果和平均跟踪结
当目标运动信息不确定性较低的时候,马氏距离是一种合适的关联因子,但是当目标遮挡或者镜头视角抖动时,仅使用马氏距离关联会导致目标身份切换。因此考虑加入外观信息,对每一个检测框
dj 计算出对应的外观特征描述符 rj ,并且设置 。对于每一个跟踪轨迹 k
。对于每一个跟踪轨迹 k
设置特征仓库 ,用来保存最近100条目标成功关联的特征描述符,
,用来保存最近100条目标成功关联的特征描述符, 。计算第 i 个跟踪框和第 j
。计算第 i 个跟踪框和第 j
个检测框最小余弦距离,如公式:

当 小于指定的阈值,认为关联成功。
小于指定的阈值,认为关联成功。
马氏距离在短时预测情况下可以提供可靠的目标位置信息,使用外观特征的余弦相似度可以在目标遮挡又重新出现时恢复目标
ID,为了使两种度量的优势互补,使用线性加权的方式进行结合:

3.2 算法流程
Deepsort算法的工作流程如下图所示:

源码流程
主函数部分整体逻辑是比较简单的,首先是将命令行参数进行解析,解析的内容包括,MOTChanlleng序列文件所在路径、需要检测文件所在的目录等一系列参数。解析之后传递给run方法,开始运行。

进入run函数之后,首先会收集流信息,包括图片名称,检测结果以及置信度等,后续会将这些流信息传入到检测框生成函数中,生成检测框列表。然后会初始化metric对象,metric对象简单来说就是度量方式,在这个地方我们可以选择两种相似度的度量方式,第一种叫做余弦相似度度量,另一种叫做欧拉相似度度量。通过metric对象我们来初始化追踪器。

接着根据display参数开始生成对应的visuializer,如果选择将检测结果进行可视化展示,那么便会生成Visualization对象,我从这个类中可以看到,它主要是调用opencv
image
viewer来讲追踪的结果进行展示。如果display是false则会生成一个NoVisualization对象,它一个虚拟可视化对象,它以给定的顺序循环遍历所有帧以更新跟踪器,而无需执行任何可视化。两者主要区别其实就是是否调用opencv将图片展示出来。其实前边我们所做的一系列工作可以说都是准备的工作,实际上核心部分就是在执行这个run方法之后。此处我们可以看到,在run方法中传入了一个frame_callback函数,这个frame_callback函数可以说是整个算法的核心部分,每一帧的图片都会执行该函数。

4 YOLOV5算法
6月9日,Ultralytics公司开源了YOLOv5,离上一次YOLOv4发布不到50天。而且这一次的YOLOv5是完全基于PyTorch实现的!在我们还对YOLOv4的各种高端操作、丰富的实验对比惊叹不已时,YOLOv5又带来了更强实时目标检测技术。按照官方给出的数目,现版本的YOLOv5每个图像的推理时间最快0.007秒,即每秒140帧(FPS),但YOLOv5的权重文件大小只有YOLOv4的1/9。
目标检测架构分为两种,一种是two-stage,一种是one-stage,区别就在于 two-stage 有region
proposal过程,类似于一种海选过程,网络会根据候选区域生成位置和类别,而one-stage直接从图片生成位置和类别。今天提到的 YOLO就是一种
one-stage方法。YOLO是You Only Look Once的缩写,意思是神经网络只需要看一次图片,就能输出结果。YOLO
一共发布了五个版本,其中 YOLOv1 奠定了整个系列的基础,后面的系列就是在第一版基础上的改进,为的是提升性能。
YOLOv5有4个版本性能如图所示:

4.1 网络架构图

YOLOv5是一种单阶段目标检测算法,该算法在YOLOv4的基础上添加了一些新的改进思路,使其速度与精度都得到了极大的性能提升。主要的改进思路如下所示:
4.2 输入端
在模型训练阶段,提出了一些改进思路,主要包括Mosaic数据增强、自适应锚框计算、自适应图片缩放;
- Mosaic数据增强:Mosaic数据增强的作者也是来自YOLOv5团队的成员,通过随机缩放、随机裁剪、随机排布的方式进行拼接,对小目标的检测效果很不错

4.3 基准网络
融合其它检测算法中的一些新思路,主要包括:Focus结构与CSP结构;
4.4 Neck网络
在目标检测领域,为了更好的提取融合特征,通常在Backbone和输出层,会插入一些层,这个部分称为Neck。Yolov5中添加了FPN+PAN结构,相当于目标检测网络的颈部,也是非常关键的。


FPN+PAN的结构

这样结合操作,FPN层自顶向下传达强语义特征(High-Level特征),而特征金字塔则自底向上传达强定位特征(Low-
Level特征),两两联手,从不同的主干层对不同的检测层进行特征聚合。
FPN+PAN借鉴的是18年CVPR的PANet,当时主要应用于图像分割领域,但Alexey将其拆分应用到Yolov4中,进一步提高特征提取的能力。
4.5 Head输出层
输出层的锚框机制与YOLOv4相同,主要改进的是训练时的损失函数GIOU_Loss,以及预测框筛选的DIOU_nms。
对于Head部分,可以看到三个紫色箭头处的特征图是40×40、20×20、10×10。以及最后Prediction中用于预测的3个特征图:
①==>40×40×255
②==>20×20×255③==>10×10×255

相关代码
class Detect(nn.Module):stride = None # strides computed during buildonnx_dynamic = False # ONNX export parameterdef __init__(self, nc=80, anchors=(), ch=(), inplace=True): # detection layersuper().__init__()self.nc = nc # number of classesself.no = nc + 5 # number of outputs per anchorself.nl = len(anchors) # number of detection layersself.na = len(anchors[0]) // 2 # number of anchorsself.grid = [torch.zeros(1)] * self.nl # init gridself.anchor_grid = [torch.zeros(1)] * self.nl # init anchor gridself.register_buffer('anchors', torch.tensor(anchors).float().view(self.nl, -1, 2)) # shape(nl,na,2)self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output convself.inplace = inplace # use in-place ops (e.g. slice assignment)def forward(self, x):z = [] # inference outputfor i in range(self.nl):x[i] = self.m[i](x[i]) # convbs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()if not self.training: # inferenceif self.onnx_dynamic or self.grid[i].shape[2:4] != x[i].shape[2:4]:self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)y = x[i].sigmoid()if self.inplace:y[..., 0:2] = (y[..., 0:2] * 2 - 0.5 + self.grid[i]) * self.stride[i] # xyy[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # whelse: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953xy = (y[..., 0:2] * 2 - 0.5 + self.grid[i]) * self.stride[i] # xywh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # why = torch.cat((xy, wh, y[..., 4:]), -1)z.append(y.view(bs, -1, self.no))return x if self.training else (torch.cat(z, 1), x)def _make_grid(self, nx=20, ny=20, i=0):d = self.anchors[i].deviceif check_version(torch.__version__, '1.10.0'): # torch>=1.10.0 meshgrid workaround for torch>=0.7 compatibilityyv, xv = torch.meshgrid([torch.arange(ny).to(d), torch.arange(nx).to(d)], indexing='ij')else:yv, xv = torch.meshgrid([torch.arange(ny).to(d), torch.arange(nx).to(d)])grid = torch.stack((xv, yv), 2).expand((1, self.na, ny, nx, 2)).float()anchor_grid = (self.anchors[i].clone() * self.stride[i]) \.view((1, self.na, 1, 1, 2)).expand((1, self.na, ny, nx, 2)).float()return grid, anchor_grid
5 最后
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
相关文章:
深度学习交通车辆流量分析 - 目标检测与跟踪 - python opencv 计算机竞赛
文章目录 0 前言1 课题背景2 实现效果3 DeepSORT车辆跟踪3.1 Deep SORT多目标跟踪算法3.2 算法流程 4 YOLOV5算法4.1 网络架构图4.2 输入端4.3 基准网络4.4 Neck网络4.5 Head输出层 5 最后 0 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 *…...
网络协议入门 笔记一
一、服务器和客户端及java的概念 JVM (Java Virtual Machine) : Java虚拟机,Java的跨平台:一次编译,到处运行,编译生成跟平台无关的字节码文件 (class文件),由对应平台的JVM解析字节码为机器指令 (010101)。 如下图所示࿰…...
系列十一、你平时工作用过的JVM常用基本配置参数有哪些?
一、常用参数 1.1、-Xms 功能:初始内存大小,默认为物理内存的1/64,等价于 -XX:InitialHeapSize 1.2、-Xmx 功能:最大分配内存,默认为物理内存的1/4,等价于 -XX:MaxHeapSize 1.3、-Xss 功能:设置…...

如何为视频添加旁白,有哪些操作技巧?
简而言之,画外音是视频的旁白,在教程视频中添加旁白可以使视频更加有趣,并向观看者传达更多的信息。 如果您是视频制作人,想要为视频添加旁白,可阅读以下文章,可以帮助您更好地进行配音。 制作配音的技巧…...
如何简单挖掘公益SRC?
目录 1、寻找漏洞 1)谷歌语法 2)fofa 2、挖掘漏洞 3、提交报告 第一步:“标题”和“厂商信息”和“所属域名” 第二步:其它内容 第三步:复现步骤 0、IP域名归属证明 1、漏洞页 2、该干啥 3、注入的结果 4、上榜吉时 时间&#x…...

PhpStorm激活
https://www.lmcc.top/articles/485.html 可用: 1、打开https://search.censys.io/ 2、搜索:services.http.response.headers.location: account.jetbrains.com/fls-auth 3、可以看到出现了很多对应跳转到 jetbrains 的服务器IP和网址,我们随便点击一…...

mysql 怎么做定时备份 / mysql 备份 / sql文件导出
在MySQL数据库中,你可以使用不同的方法来定时备份数据库。以下是其中的一种方法,使用Linux系统中的cron任务和mysqldump命令来创建定时备份: 创建备份脚本: 首先,创建一个脚本文件,比如backup_script.sh&am…...
416. 分割等和子集问题(动态规划)
题目 题解 class Solution:def canPartition(self, nums: List[int]) -> bool:# badcaseif not nums:return True# 不能被2整除if sum(nums) % 2 ! 0:return False# 状态定义:dp[i][j]表示当背包容量为j,用前i个物品是否正好可以将背包填满ÿ…...

【软件安装】Centos系统中安装docker容器(华为云HECS云耀服务器)
这篇文章,主要介绍Centos系统中安装docker容器(华为云HECS云耀服务器)。 目录 一、安装docker 1.1、卸载旧版本docker 1.2、更新repo镜像 1.3、安装依赖包 1.4、添加docker-ce镜像 1.5、安装docker-ce 1.6、查看docker安装版本 1.7、…...

GitHub Proxy 快速下载github文件
https://ghproxy.com/ 解决 经常被墙 下载缓慢 访问不了...

大厂秋招真题【栈】Bilibili2019秋招-简单表达式求值
文章目录 题目描述与示例题目描述输入描述输出描述示例输入输出 解题思路代码PythonJavaC时空复杂度 华为OD算法/大厂面试高频题算法练习冲刺训练 题目描述与示例 题目描述 给定一个合法的表达式字符串,其中只包含非负整数、加法、减法以及乘法符号(不…...
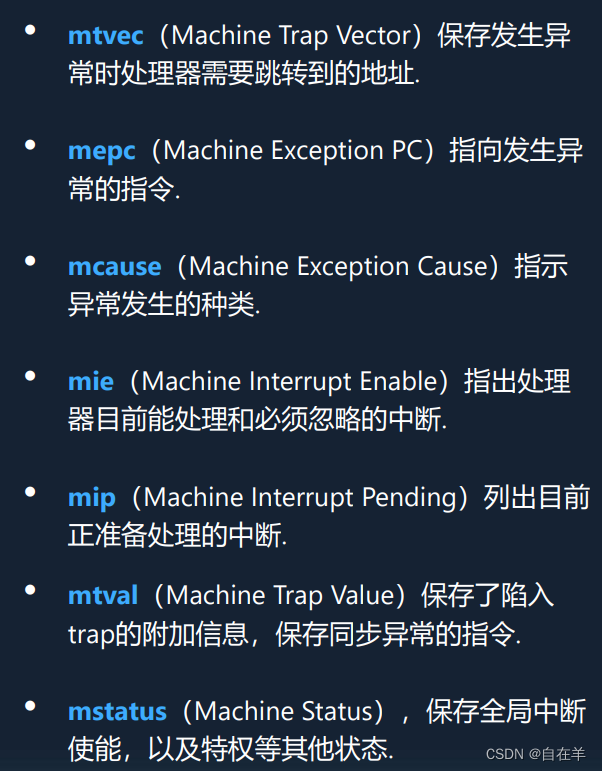
(一)RISC-V 指令集及寄存器介绍
1. RISC-V指令集介绍 RISC-V 念作 “risk-five”,代表着 Berkeley 所研发的第五代精简指令集。 该项目 2010 年始于加州大学伯克利(Berkeley)分校,希望选择一款 ISA用于科研和教学。经过前期多年的研究和选型,最终决定…...

二十三种设计模式:解密职责链模式-购物优惠活动的设计艺术
在购物领域,为了吸引和激励消费者,商家常常会推出各种优惠活动,比如满减、打折、赠品等。然而,这些优惠活动的处理逻辑通常较为复杂,需要根据购物订单的条件进行判断和处理。本文将深入探讨职责链模式的实现方式&#…...
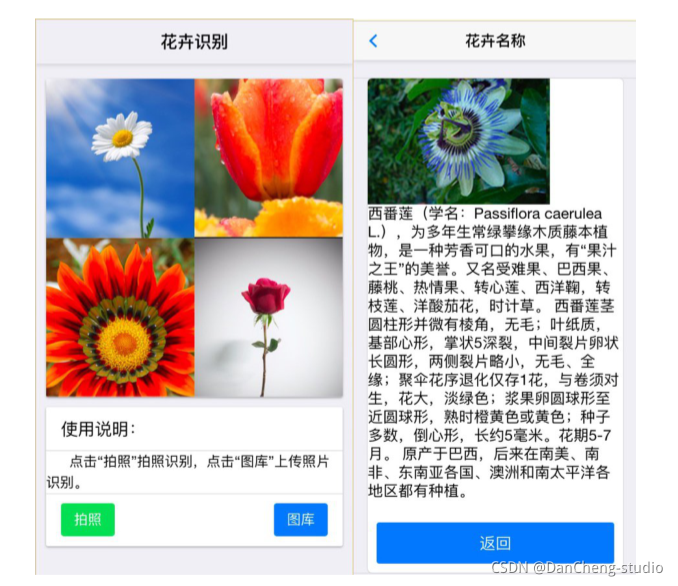
竞赛 题目:基于深度学习卷积神经网络的花卉识别 - 深度学习 机器视觉
文章目录 0 前言1 项目背景2 花卉识别的基本原理3 算法实现3.1 预处理3.2 特征提取和选择3.3 分类器设计和决策3.4 卷积神经网络基本原理 4 算法实现4.1 花卉图像数据4.2 模块组成 5 项目执行结果6 最后 0 前言 🔥 优质竞赛项目系列,今天要分享的是 基…...
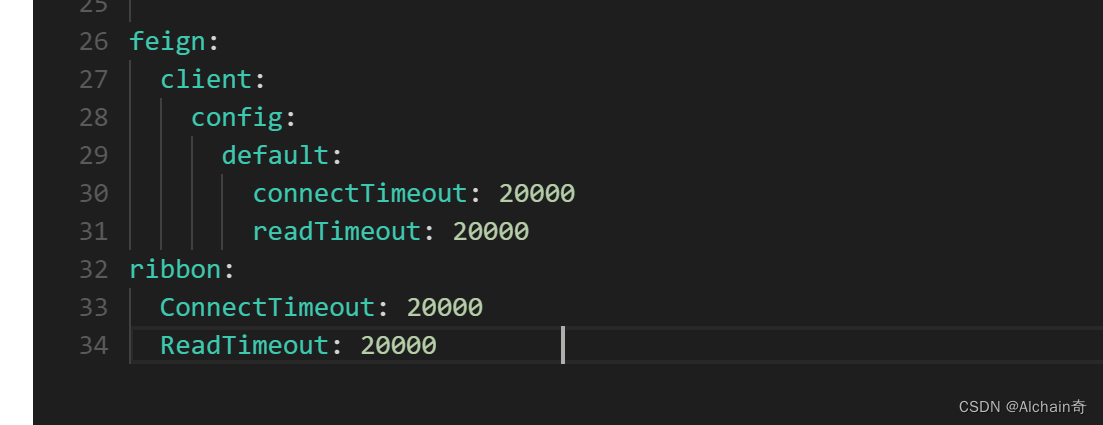
unexpected end of stream on
SpringCloud使用FeignClient调用第三方接口报错unexpected end of stream on ; 解决方法: 1.检查服务器端口是否被占用 lsof -i:端口; 2.nacos添加超时配置:...

【微信小程序篇】- 组件
最近自己在尝试使用AIGC写一个小程序,页面、样式、包括交互函数AIGC都能够帮我完成(不过这里有一点问题AIGC的上下文关联性还是有限制,会经常出现对于需求理解跑偏情况,需要不断的重复强调,并纠正错误,才能得到你想要的…...

使用Sqoop命令从Oracle同步数据到Hive,修复数据乱码 %0A的问题
一、创建一张Hive测试表 create table test_oracle_hive(id_code string,phone_code string,status string,create_time string ) partitioned by(partition_date string) ROW FORMAT DELIMITED FIELDS TERMINATED BY ,; 创建分区字段partition_date,…...

NC Cloud uploadChunk文件上传漏洞复现
简介 NC Cloud是指用友公司推出的大型企业数字化平台。支持公有云、混合云、专属云的灵活部署模式。该产品uploadChunk文件存在任意文件上传漏洞。 漏洞复现 FOFA语法: app"用友-NC-Cloud" 访问页面如下所示: POC:/ncchr/pm/fb/…...

多标签页之间的通信
解决方案有两种思路:浏览器端解决方案、服务器端解决方案。 一、浏览器端解决方案: 思路:本地数据存储 <!-- index01.html --> <input id"name"> <input type"button" id"btn" value"…...

CI/CD -gitlab
目录 一、常用命令 二、部署 一、常用命令 官网:https://about.gitlab.com/install/ gitlab-ctl start # 启动所有 gitlab 组件 gitlab-ctl stop # 停止所有 gitlab 组件 gitlab-ctl restart # 重启所有 gitlab 组件 gitlab-ctl statu…...

别再只懂ls -l了!手把手教你用getfattr/setfattr玩转Linux文件隐藏属性
别再只懂ls -l了!手把手教你用getfattr/setfattr玩转Linux文件隐藏属性 在Linux系统中,文件权限和属性管理是每个开发者和管理员的必修课。大多数人熟悉 ls -l 展示的基础权限,但很少有人深入探索文件系统中那些不为人知的"隐藏技能&q…...
)
医考app哪个比较好?2026年四款主流医考App深度横评(医路赢家/医考帮/蓝基因/丁香医考)
本文导读:市面上医考app越来越多,选错浪费时间还耽误备考。我从题库、课程覆盖、服务、通过率、核心特色、优点、缺点、适合人群八个维度,逐款拆解目前最主流的四款医考App——医路赢家、医考帮、蓝基因、丁香医考。全文无广,真实…...

AI量化交易中的信号相关性与认知依赖:系统性风险与应对策略
1. 项目概述:当AI成为市场共识,系统性风险如何被“编程”?在金融市场的交易大厅和量化部门的代码仓库里,一场静默的变革已经持续了十年。这不是关于某个算法战胜了市场,而是关于市场本身正在被算法重新定义。核心矛盾在…...

大脑规则:为什么你学不进去?10个科学方法提升学习效率
大脑规则:为什么你学不进去?10个科学方法提升学习效率 副标题: 从进化论到认知科学,附实战学习方案 一、痛点:为什么你总是学不进去? 你有没有这样的经历: 坐在书桌前,书翻开了,但脑子一片空白 熬夜学习,第二天效率更低,形成恶性循环 一边看视频一边回消息,结果什…...

Oracle EBS COA 嵌入 SAP 利润中心段:设计逻辑、哲学、思路、用途、优缺点深度分析
Oracle EBS COA 嵌入 SAP 利润中心段:设计逻辑、哲学、思路、用途、优缺点深度分析先明确核心前提: 你当前场景是集团双系统架构(SAPOracle EBS),或Oracle EBS 承接 SAP 迁移 / 数据映射,计划在 EBS 会计科…...

3分钟解决网易云音乐格式限制:免费NCM转换工具完全指南
3分钟解决网易云音乐格式限制:免费NCM转换工具完全指南 【免费下载链接】ncmdump 项目地址: https://gitcode.com/gh_mirrors/ncmd/ncmdump 你是否曾因网易云音乐下载的NCM格式文件无法在车载音响或普通播放器中播放而烦恼?今天,我将…...

Codeforces Round 1057
【打得太糖了】Codeforces Round 1057 (Div. 2) solve 3 题 https://www.bilibili.com/video/BV1Gi4nzYE66/ 【Codeforces Round 1057 (Div. 2)实况】好久没打cf了,只会A-D https://www.bilibili.com/video/BV12q4xzMEy5/ 憧憬成为 Master 第 29 集 —— 反向冲分 (…...

proj-agones:知识点:helm
helm install之后的log be like:(base) savilahaobogon ~ % helm install prometheus prometheus-community/kube-prometheus-stack -n monitoring --create-namespace NAME: prometheus LAST DEPLOYED: Wed May 20 14:54:39 2026 NAMESPACE: monitoring STATUS: de…...

通过curl命令直接测试Taotoken聊天补全接口的配置与调用方法
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过curl命令直接测试Taotoken聊天补全接口的配置与调用方法 在开发或调试大模型应用时,有时你可能希望绕过高级SDK&am…...

机器学习真实难点:知识断裂、工具混沌与数据偏差
1. 这不是一份职业指南,而是一份“入行前必读的清醒剂”“Why it’s Super Hard to be an ML Researcher or Developer?”——这个标题我第一次看到时,正坐在凌晨两点的实验室里,盯着第17版模型在验证集上掉点0.3%的结果发呆。旁边三台GPU服…...