【目标测距】雷达投影测距
文章目录
- 前言
- 一、读取点云
- 二、点云投影图片
- 三、读取检测信息
- 四、点云投影测距
- 五、学习交流
前言
- 雷达点云投影相机。图片目标检测,通过检测框约束等等对目标赋予距离。
- 计算消耗较大,适合离线验证操作。在线操作可以只投影雷达检测框。
一、读取点云
- python 读取点云,我这里用的是 open3d 这个库。
import open3d as o3dpcd_path = "1.pcd"
pcd = o3d.io.read_point_cloud(pcd_path) # 点云
二、点云投影图片
- 明白标定原理,这部分就很简单,就是一个矩阵运算。投影像素误差多少与传感器标定强相关。
- 下面代码中 mtx:相机内参 r_camera_to_lidar_inv:相机到雷达的旋转矩阵的逆矩阵 t_camera_to_lidar:相机到雷达的平移向量

import open3d as o3d
import numpy as np
import cv2color_label = [(255, 0, 0), (121, 68, 222), (0, 0, 255), (0, 255, 0), (199, 199, 53)] # 红黄蓝绿青# 不同距显示不同颜色
def get_color(distance):for i in range(2, 50):if i < distance < i + 1:return color_label[i % len(color_label)]return color_label[0]pcd_path = "1.pcd"
pcd = o3d.io.read_point_cloud(pcd_path) # 点云
image = cv2.imread("1.jpg")cloud = np.asarray(pcd.points)
for point in cloud:camera_coordinate = np.dot(mtx, np.dot(r_camera_to_lidar_inv, point.reshape(3, 1) - t_camera_to_lidar))pixe_coordinate = camera_coordinate / camera_coordinate[2]x_pixe, y_pixe, _ = pixe_coordinatecv2.circle(image, (int(x_pixe), int(y_pixe)), 1, get_color(camera_coordinate[2]), 2)
三、读取检测信息
- 图像目标检测信息保存在txt文件。格式: frame , x_center , y_cente , width , height , score。
import numpy as npdef GetDetFrameRes(seq_dets, frame):detects = seq_dets[(seq_dets[:, 0] == frame) & (seq_dets[:, 5] <= 6), 1:6]detects[:, 0:2] -= detects[:, 2:4] / 2 # convert to [x中心,y中心,w,h] to [x左上,y左上,w,h]detects[:, 2:4] += detects[:, 0:2] # convert to [x左上,y左上,w,h] to [x左上,y左上,x右下,y右下]return detectsdet_dir = "result.txt"
det_data = np.loadtxt(det_dir, delimiter=',')
# 假如有100帧图片
for i in range(100):dets_frame = GetDetFrameRes(det_data, i) # 获取第i帧检测结果
四、点云投影测距
- 判断点云是否在图像目标检测框内。
- 对于图片目标检测框有重复的情况,需要对目标检测框进行排列,距离靠前的检测框优先计算。
- 选取点云中 x 最小的为目标的距离,y 距离取目标框内平均值
import os
import cv2
import yaml
import numpy as np
import open3d as o3d
from datetime import datetimedef read_yaml(path):with open(path, 'r', encoding='utf-8') as f:result = yaml.load(f.read(), Loader=yaml.FullLoader)camera_mtx = result["camera"]["front_center"]["K"]r_camera = result["camera"]["front_center"]["rotation"]t_camera = result["camera"]["front_center"]["translation"]lidar_to_car = result["lidar"]["top_front"]["coordinate_transfer"]c_m = np.array([camera_mtx]).reshape(3, 3)r_c = np.array([r_camera]).reshape(3, 3)t_c = np.array([t_camera]).reshape(3, 1)l_c = np.array([lidar_to_car]).reshape(4, 4)return c_m, r_c, t_c, l_cdef get_box_color(index):color_list = [(96, 48, 176), (105, 165, 218), (18, 153, 255)]return color_list[index % len(color_list)]# 不同距显示不同颜色
def get_color(distance):for i in range(2, 50):if i < distance < i + 1:return color_label[i % len(color_label)]return color_label[0]def GetDetFrameRes(seq_dets, frame):detects = seq_dets[(seq_dets[:, 0] == frame) & (seq_dets[:, 5] <= 6), 1:6]detects[:, 0:2] -= detects[:, 2:4] / 2 # convert to [x中心,y中心,w,h] to [x左上,y左上,w,h]detects[:, 2:4] += detects[:, 0:2] # convert to [x左上,y左上,w,h] to [x左上,y左上,x右下,y右下]return detects# 点云投影到图片
def point_to_image(image_path, pcd_point, det_data, show=False):cloud = np.asarray(pcd_point.points)image = cv2.imread(image_path)det_data = det_data[np.argsort(det_data[:, 3])[::-1]]n = len(det_data)point_dict = {i: [] for i in range(n)}for point in cloud:if 2 < point[0] < 100 and -30 < point[1] < 30:camera_coordinate = np.dot(mtx, np.dot(r_camera_to_lidar_inv, point.reshape(3, 1) - t_camera_to_lidar))pixe_coordinate = camera_coordinate / camera_coordinate[2]x_pixe, y_pixe, _ = pixe_coordinate# 判断一个点是否在检测框里面idx = np.argwhere((x_pixe >= det_data[:, 0]) & (x_pixe <= det_data[:, 2]) &(y_pixe >= det_data[:, 1]) & (y_pixe <= det_data[:, 3])).reshape(-1)if list(idx):index = int(idx[0])cv2.circle(image, (int(x_pixe), int(y_pixe)), 1, get_box_color(index), 2)point_dict[index].append([point[0], point[1]])for i in range(n):cv2.rectangle(image, (int(det_data[i][0]), int(det_data[i][1])), (int(det_data[i][2]), int(det_data[i][3])),get_box_color(int(det_data[i][4])), 2) # 不同类别画不同颜色框np_data = np.array(point_dict[i])if len(np_data) < 3:continuex = np.min(np_data[:, 0])min_index = np.argmin(np_data, axis=0)y = np.average(np_data[min_index, 1])cv2.putText(image, '{},{}'.format(round(x, 1), round(y, 1)), (int(det_data[i][0]), int(det_data[i][1]) - 10),cv2.FONT_HERSHEY_COMPLEX, 1, get_box_color(int(det_data[i][4])), 2)video.write(image)if show:cv2.namedWindow("show", 0)cv2.imshow("show", image)cv2.waitKey(0)def main():pcd_file_paths = os.listdir(pcd_dir)img_file_paths = os.listdir(img_dir)len_diff = max(0, len(pcd_file_paths) - len(img_file_paths))img_file_paths.sort(key=lambda x: float(x[:-4]))pcd_file_paths.sort(key=lambda x: float(x[:-4]))pcd_file_paths = [pcd_dir + x for x in pcd_file_paths]img_file_paths = [img_dir + x for x in img_file_paths]det_data = np.loadtxt(det_dir, delimiter=',')for i in range(min(len(img_file_paths), len(pcd_file_paths))):pcd = o3d.io.read_point_cloud(pcd_file_paths[i + len_diff]) # 点云now = datetime.now()dets_frame = GetDetFrameRes(det_data, i)point_to_image(img_file_paths[i], pcd, dets_frame, show=show)print(i, datetime.now() - now)video.release()if __name__ == '__main__':color_label = [(255, 0, 0), (121, 68, 222), (0, 0, 255), (0, 255, 0), (199, 199, 53)] # 红黄蓝绿青path = "F:\\data\\"pcd_dir = path + "lidar_points\\" # 点云文件夹绝对路径img_dir = path + "image_raw\\" # 图片文件夹绝对路径det_dir = path + "result.txt" # 目标检测信息video_dir = path + "point_img4.mp4"video = cv2.VideoWriter(video_dir, cv2.VideoWriter_fourcc('m', 'p', '4', 'v'), 10, (1920, 1080)) # 保存视频cali_dir = "sensor.yaml"mtx, r_camera, t_camera, lidar_to_car = read_yaml(cali_dir)r_lidar, t_lidar = lidar_to_car[:3, :3], lidar_to_car[:3, -1].reshape(3, 1)r_camera_to_lidar = np.linalg.inv(r_lidar) @ r_camerar_camera_to_lidar_inv = np.linalg.inv(r_camera_to_lidar)t_camera_to_lidar = np.linalg.inv(r_lidar) @ (t_camera - t_lidar) # 前相机,主雷达标定结果show = Truemain()五、学习交流
有任何疑问可以私信我,欢迎交流学习。
相关文章:

【目标测距】雷达投影测距
文章目录 前言一、读取点云二、点云投影图片三、读取检测信息四、点云投影测距五、学习交流 前言 雷达点云投影相机。图片目标检测,通过检测框约束等等对目标赋予距离。计算消耗较大,适合离线验证操作。在线操作可以只投影雷达检测框。 一、读取点云 py…...

uniapp、小程序canvas相关
1、圆形or圆形头像 //示例 const ctx uni.createCanvasContext(myCanvas); //canvas const round uni.upx2px(72) / 2; // 半径 const x uni.upx2px(92); //目标x轴位置 const y uni.upx2px(236); //目标y轴位置//if 图片是不是静态资源 async > const imgSrc https:/…...
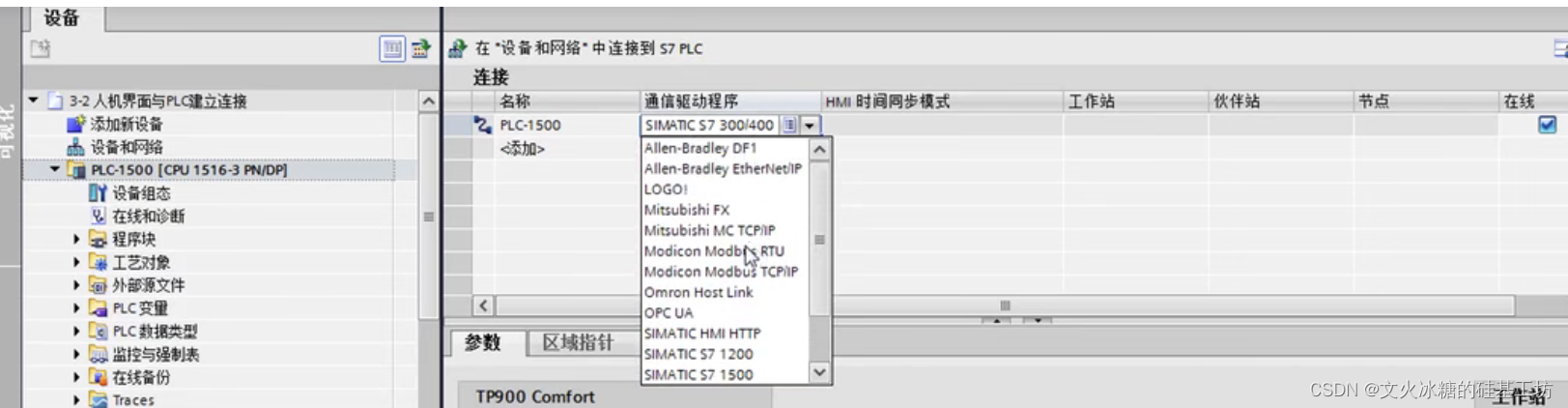
[工业自动化-23]:西门子S7-15xxx编程 - 软件编程 - 西门子PLC人机界面交互HMI功能概述、硬件环境准备、软件环境准备
目录 一、什么是人机界面 二、什么是PLC人机交互界面HMI 三、人机界面设计的功能列表 四、开发主机与PLC的连接方式 五、开发主机与HMI的连接方式 六、HMI组态 一、什么是人机界面 人机界面是指人与机器或系统之间的交互界面。它是人类与计算机或其他设备之间进行信息交换…...

在Ubuntu系统中安装VNC并结合内网穿透实现公网远程访问
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🦄 博客首页——🐅🐾猫头虎的博客🎐 🐳 《面试题大全专栏》 🦕 文章图文…...

java基础练习缺少项目?看这篇文章就够了(上)!
公众号:全干开发 。 专注分享简洁但高质量的动图技术文章! 项目概述 本教程适合刚学习完java基础语法的同学,涉及if语句、循环语句、类的封装、集合等基础概念,使用大量gif图帮助读者演示代码操作、效果等,是一个非常…...

鸿蒙为什么使用typescript 作为开发语言 而不是 flutter 或者 kotlin
猜想如下 dev studio 是基于 idea 二次开发的 ,使用kotlin 应该是更合理 变成 jetbrain 全家桶, 但是 现在android 开发也是kotlin 是不是为了做分割 ,所以不使用kotlin flutter 是谷歌的 安卓也是谷歌的 所以不采用 typescript 是微软的…...
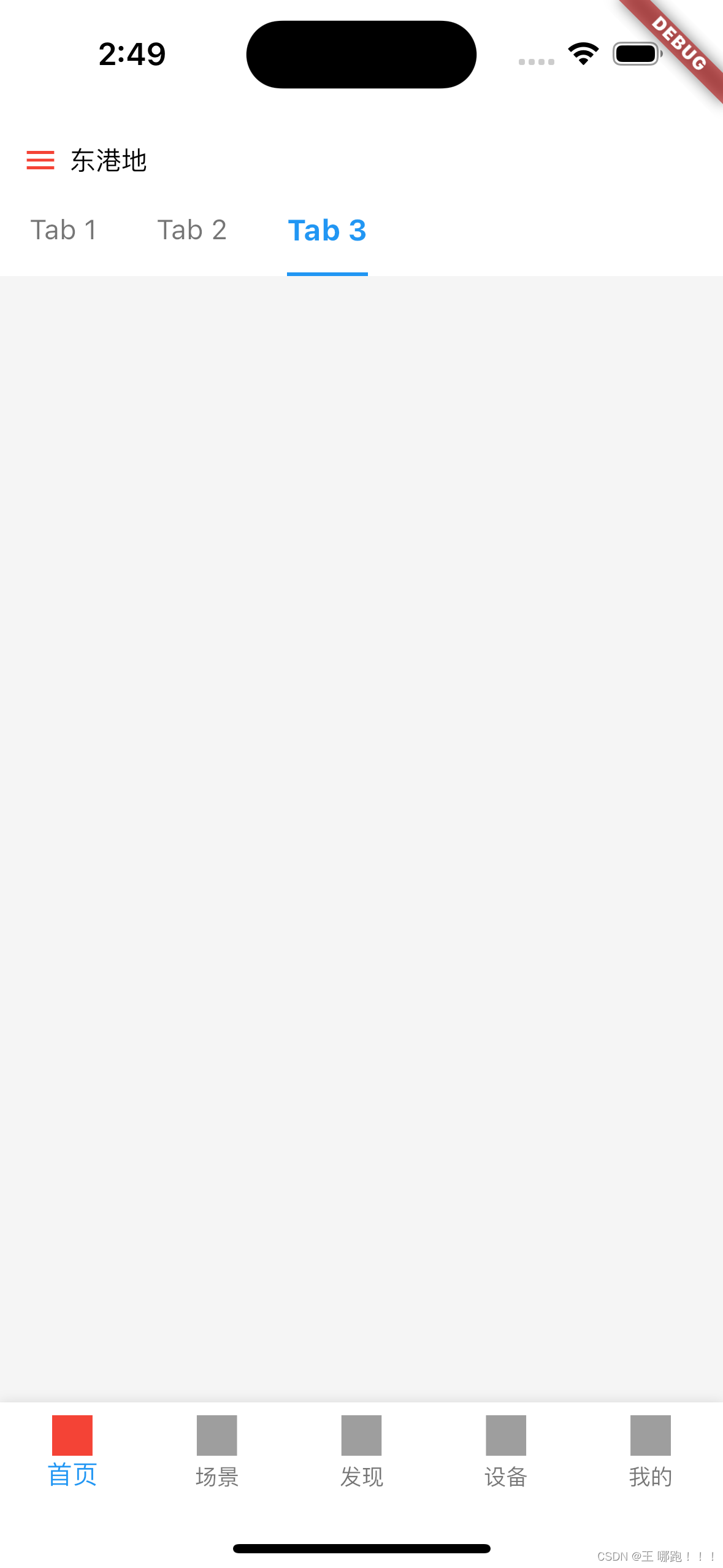
Flutter NestedScrollView 、SliverAppBar全解析,悬浮菜单的应用
在我们开发过程中经常会使用到悬浮菜单的使用,当我们滑动到指定位置后,菜单会自动悬浮。 实现效果如下(左为滑动前、右为滑动后): 上述便是通过NestedScrollView 、SliverAppBar实现的效果,通过两个控件我…...

Mongodb 副本集名称重命名
副本集重命名 要重命名副本集,您必须关闭副本集的所有成员,然后使用新的副本集名称配置每个成员的数据库。 此过程需要停机。 先决条件 确保您的副本集未分片。重命名过程仅适用于未分片的副本集。 在重命名副本集之前,请 对 MongoDB 部…...

C#WPF属性触发器实例
本文讲解C#WPF属性触发器的实例 在属性触发器中,当一个属性发生更改时,它将立即或动画更改另一个属性 实例 <Windowx:Class="TriggerDemo.MainWindow"xmlns="http://schemas.microsoft.com/winfx/2006/xaml/presentation"xmlns:x="http://sch…...

Kotlin 核心语法,为什么选择Kotlin ?
Kotlin 是一个基于 JVM 的新的编程语言,由 JetBrains 开发。与Java相比,Kotlin的语法更简洁、更具表达性,而且提供了更多的特性。 Kotlin是使用Java开发者的思维被创建的,Intellij作为它主要的开发IDE。对于 Android开发者&#…...
SpringCloud微服务:Nacos的集群、负载均衡、环境隔离
目录 集群 在user-service的yml文件配置集群 启动服务 负载均衡 order-service配置集群 设置负载均衡 当本地集群的服务挂掉时 访问权重 环境隔离 1、Nacos服务分级存储模型 一级是服务,例如userservice 二级是集群,例如杭州或上海 …...

Selenium+Python做web端自动化测试框架实战
最近受到万点暴击,由于公司业务出现问题,工作任务没那么繁重,有时间摸索seleniumpython自动化测试,结合网上查到的资料自己编写出适合web自动化测试的框架,由于本人也是刚刚开始学习python,这套自动化框架目…...

Linux:安装MySQL服务(非docker方式)
1、下载安装包 下载MySQL安装包,需要Oracle官网的账号 下面是网友提供的账号及密码,亲测有效。 账户:3028064308qq.com 我用的这个,可以登陆 密码:OraclePassword123!Oracle Account: 602205528qq.com Oracle Pass…...

C++实现有理数类 四则运算和输入输出
面试 C 程序员,什么样的问题是好问题? - 知乎 https://www.cnblogs.com/bwjblogs/p/12982908.html...
小鸟飞呀飞
欢迎来到程序小院 小鸟飞呀飞 玩法:鼠标控制小鸟飞翔的方向,点击鼠标左键上升,不要让小鸟掉落,从管道中经过,快去飞呀飞哦^^。开始游戏https://www.ormcc.com/play/gameStart/204 html <canvas width"288&quo…...
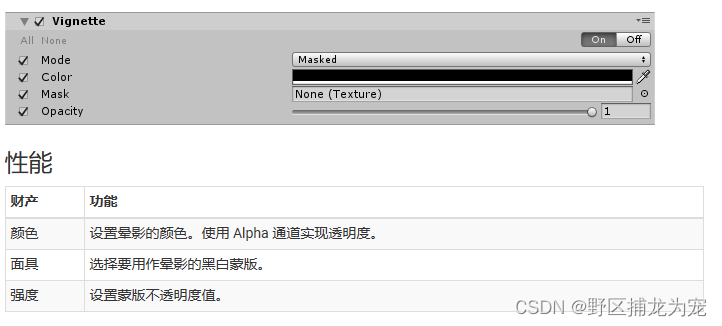
Unity 场景烘培 ——unity Post-Processing后处理1(四)
提示:文章有错误的地方,还望诸位大神不吝指教! 文章目录 前言一、Post-Processing是什么?二、安装使用Post-Processing1.安装Post-Processing2.使用Post-Processing(1).添加Post-process Volume(…...
Burpsuite抓HTTPS证书导入问题
Burpsuite证书导出有两种方法: 第一种方法 1、开启代理后直接在浏览器中输入burp下载CA证书 2、在中间证书颁发机构中导入刚导出的证书 3、导入完成后再把这个证书选择导出,另存为cer格式的文件 4、在受信任的根证书颁发机构中导入刚保存的cer格式证书…...

python保存文件到zip压缩包中
这里我们使用zipfile这个库进行操作,保存压缩文件相对简单,只需要指定文件名即可,不需要读取那个文件: with zipfile.ZipFile("zip文件路径", mode, zipfile.ZIP_DEFLATED) as z:z.write("压缩源文件路径", …...

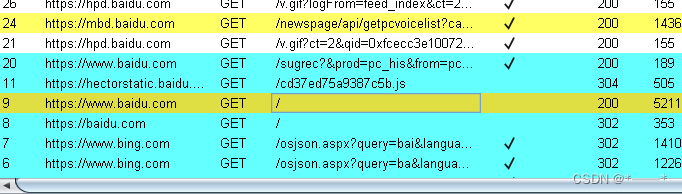
java发送媒体类型为multipart/form-data的请求
文章目录 public static String sendMultipartFormDataPostRequest(String urlString, String data) throws IOException {String fullUrl urlString "?" data;log.info("完整请求路径为{}", fullUrl);URL url new URL(fullUrl);HttpURLConnection co…...
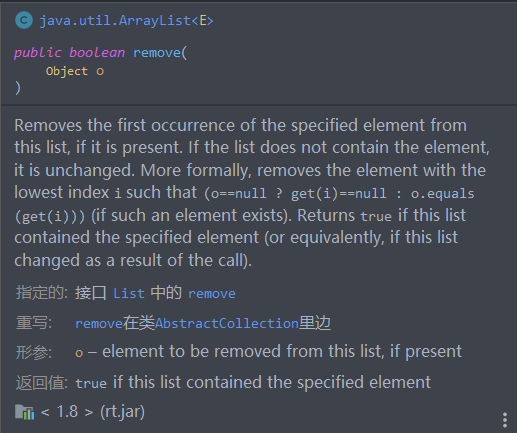
自定义类使用ArrayList中的remove
Java中ArrayList对基础类型和字符串类型的删除操作,直接用remove方法即可。但是对于自定义的类来说,用remove方法删除不了,因为没有办法确定是否是要删除的对象。 ArrayList中remove源码是: public boolean remove(Object o) {if…...

NV040D语音芯片在儿童坐姿纠正器中的低成本高效应用
1. 项目概述:从痛点出发的智能硬件设计作为一名在消费电子和智能硬件领域摸爬滚打了十几年的工程师,我见过太多“为设计而设计”的产品,它们功能花哨,却往往忽略了最核心的用户需求。今天想和大家深入聊聊的,是一个看似…...

C 语言自定义类型:结构体、位段、联合体、枚举
struct:成员并排,空间叠加位段:struct 里按 bit 分配,极致省空间union:成员重叠,空间共享enum:有限常量,替代宏,更安全一、结构体 struct:成员并排࿰…...

武汉专升本民办 vs 公办机构怎么选
每年到了专科大三的春天,武汉的专升本备考群里总会出现类似的问题:“公办机构是不是比民办靠谱?”“民办会不会拿钱不办事?”“集训营到底该冲公办还是选民办?”说实话,这个问题没有标准答案,因…...

Go HTTP Router 深度解析:从原理到实战
Go HTTP Router 深度解析:从原理到实战 引言 在Go语言的Web开发中,Router是核心组件之一。高效的路由系统能够显著提升Web应用的性能和可维护性。本文将深入探讨Go语言HTTP Router的实现原理,并通过实战案例展示如何构建高性能的路由系统。 一…...

3分钟掌握AlwaysOnTop:让关键窗口始终置顶的Windows神器
3分钟掌握AlwaysOnTop:让关键窗口始终置顶的Windows神器 【免费下载链接】AlwaysOnTop Make a Windows application always run on top 项目地址: https://gitcode.com/gh_mirrors/al/AlwaysOnTop 你是否曾经在编写代码时需要同时查看API文档,却被…...
为9.2%)
2026-2032期间,全球半导体设备零部件PVD和ALD熔射服务市场年复合增长率(CAGR)为9.2%
QYResearch调研显示,2025年全球半导体设备零部件PVD和ALD熔射服务市场规模大约为0.58亿美元,预计2032年将达到1.07亿美元,2026-2032期间年复合增长率(CAGR)为9.2%。行业竞争格局与细分市场市场分析全球半导体设备零部件…...
:含12个领域专属风格锚点模板与冲突检测CLI工具)
NotebookLM风格一致性密钥库(仅限首批200位AI架构师开放获取):含12个领域专属风格锚点模板与冲突检测CLI工具
更多请点击: https://kaifayun.com 第一章:NotebookLM风格一致性密钥库的演进逻辑与核心价值 NotebookLM 风格的一致性密钥库并非传统密码学密钥管理系统的简单复刻,而是面向语义化知识协作场景深度重构的基础设施。其演进逻辑根植于三个关键…...

微信小程序 消防知识学习平台系统
目录同行可拿货,招校园代理 ,本人源头供货商项目概述核心功能技术实现特色亮点适用场景项目技术支持源码获取详细视频演示 :同行可合作点击我获取源码->获取博主联系方式->进我个人主页-->同行可拿货,招校园代理 ,本人源头供货商 项目概述 微信小程序“消…...

抖音图片怎么去水印文字?2026年实测工具推荐及方法完全指南
抖音图片的水印文字问题困扰着很多内容创作者和素材收集者。无论是想保存喜欢的图片、重新利用优质素材,还是为自己的创意项目寻找灵感,去除不必要的水印都是必要的技能。本文为你详细介绍抖音图片去水印文字的多种方法,从专业工具到手机应用…...

10M参数也能跑ARC与数独,Bengio团队押注「多轨迹推理」
10M 参数跑到数独 97%,GRAM 把递归推理改成多轨迹采样。 10M 参数,在大模型时代显得有些微不足道。 但 Yoshua Bengio 团队与 KAIST、Mila、NYU 研究人员提出的 GRAM,用这个量级的模型跑出了几组值得注意的结果。 在 Sudoku-Extreme 上准确率…...