PPP/INS紧组合算法
前言:在学习紧组合之前学会GNSS/INS松组合是很有必要的,i2NAV团队开源的KF_GINS项目可以作为GNSS/INS松组合学习模板,本文章主要对武汉大学i2NAV发布的PPP/INS紧组合学习资源进行算法层面的总结,链接:
武汉大学多源智能导航实验室 (i2nav.cn)
一、GNSS相位观测方程
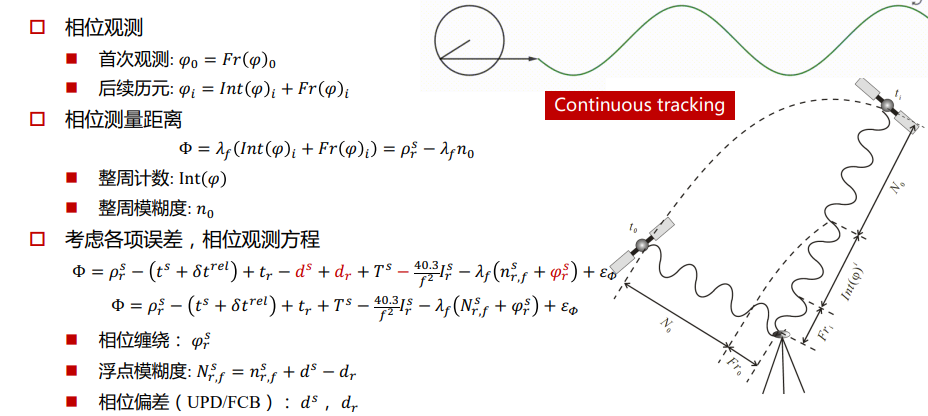 这个地方需要注意到在观测方程中减去了整周模糊度*波长,也是我觉得在物理意义上比较好理解的形式,而在大多数GNSS相位观测方程中是这种形式的:
这个地方需要注意到在观测方程中减去了整周模糊度*波长,也是我觉得在物理意义上比较好理解的形式,而在大多数GNSS相位观测方程中是这种形式的:

在这套紧组合学习方案中,PPP模型选用了无电离层模型,如下:

在初始位置按泰勒级数展开:

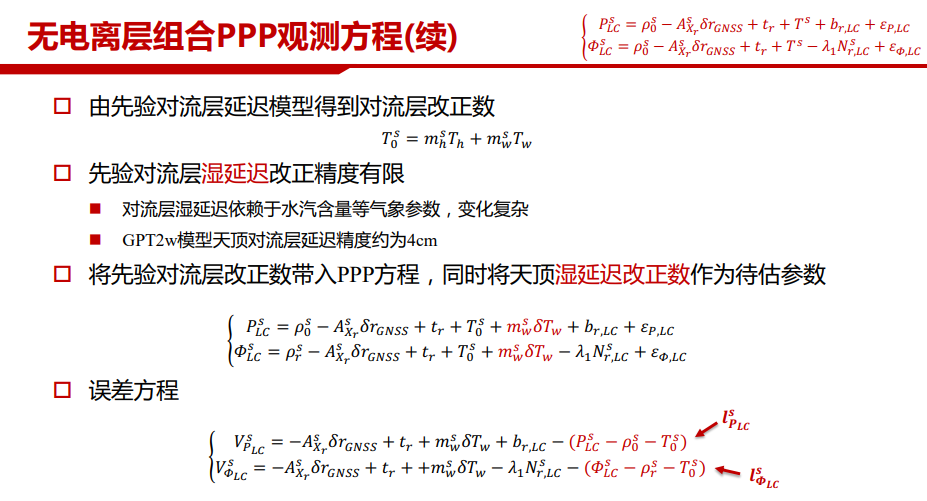
联系误差方程:v=BX-l,参数有测站三维坐标,接收机钟差,对流层湿延迟,组合浮点模糊度,而在伪距观测方程中则包括了码偏(TGD)参数。
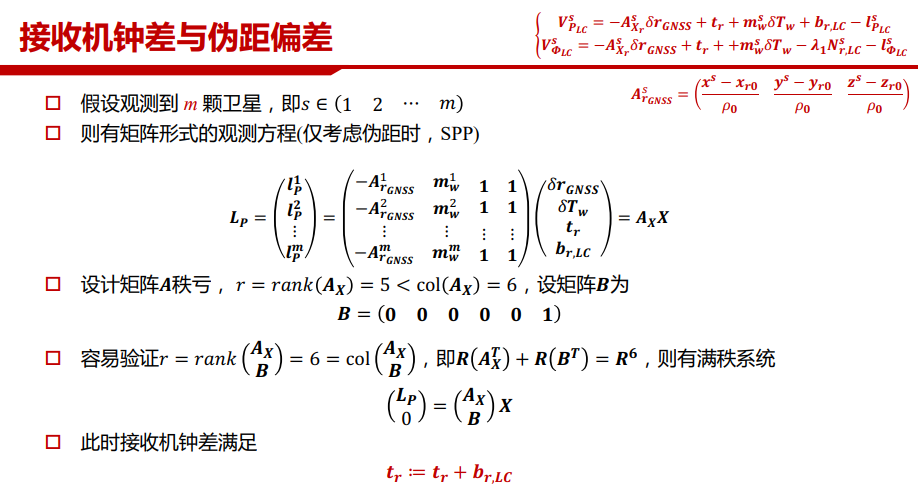
但是存在秩亏现象,将伪距偏差归算到接收机钟差中,得到最终误差方程。

观测方程:
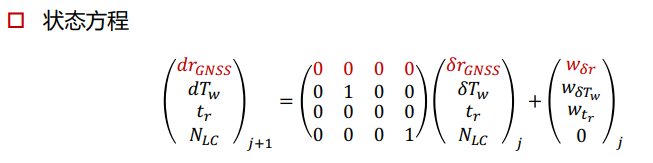
因为将位置误差和接收机钟差建模为白噪声(即与时间无关的误差),将对流层湿延迟建模为随机游走噪声,浮点模糊度为常数,得到如下状态方程。
状态方程:
什么是白噪声和随机游走噪声:
时间序列R语言操作2——白噪声和随机游走模型_r语言随机游走序列生成-CSDN博客
概率统计笔记:白噪声与随机游走_随机游走噪声-CSDN博客
无论是扩展卡尔曼滤波还是图优化的方式,都是从观测方程和状态方程这两个基本方程进行解算。
二、惯导误差方程
在i2NAV实验室网站中有详细的惯导学习资源,至少要做到了解下面参数和不同坐标系转换的水平。
误差方程:

状态方程:
 杆臂效应改正: 将INS解算得到的IMU中心通过旋转平移得到GNSS测量中心
杆臂效应改正: 将INS解算得到的IMU中心通过旋转平移得到GNSS测量中心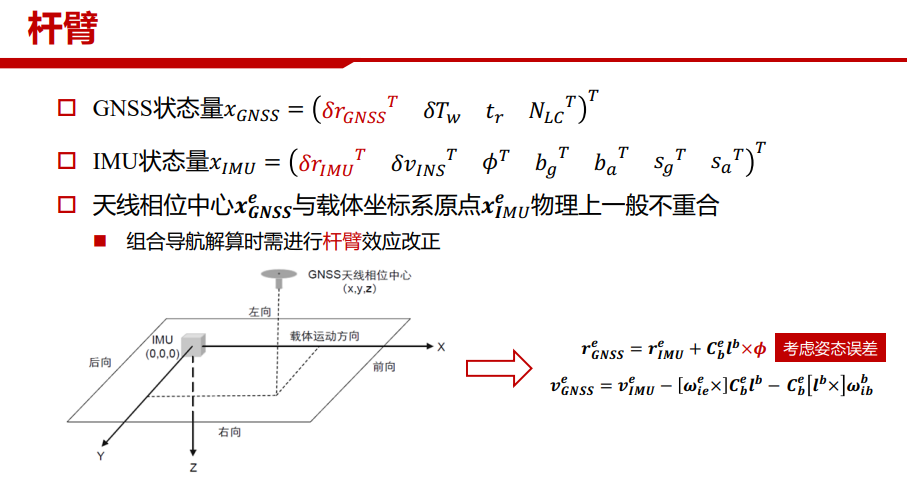
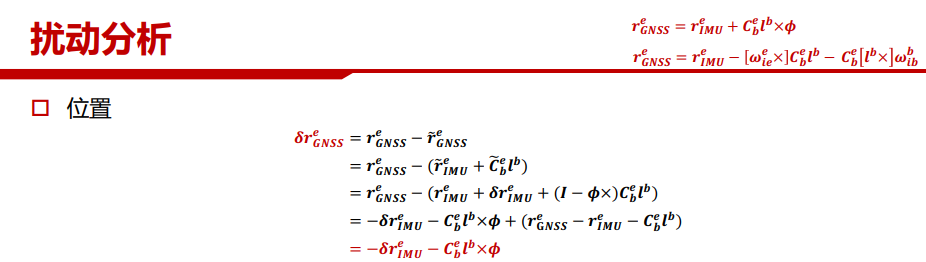
即GNSS微分位置参数=GNSS测量值-INS杆臂改正后的测量值,将右上角的式子代入解算过程得到最终结果。
三、PPP/INS紧组合
观测方程: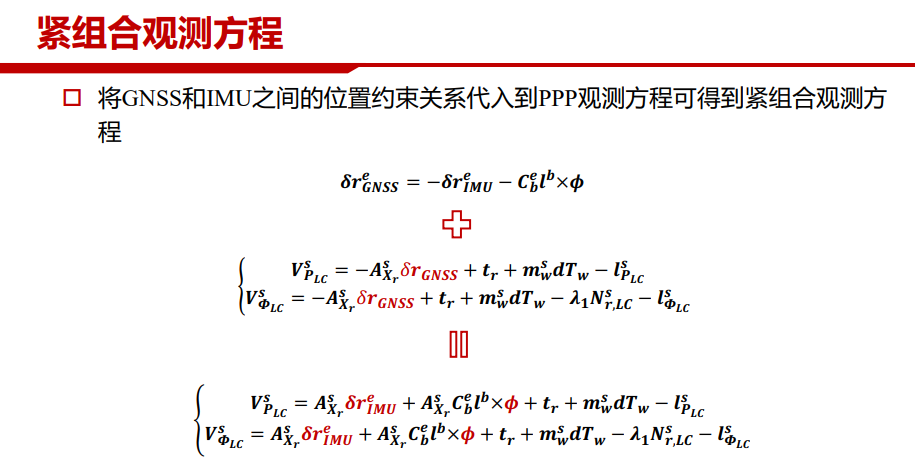
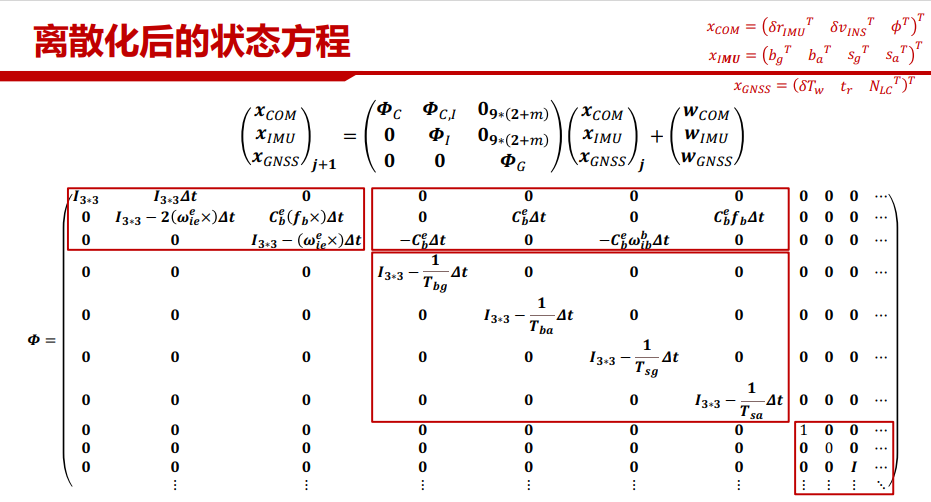
状态方程:
GNSS/INS观测方程共有参数:IMU位置,速度,姿态3*3=9个参数
IMU特有参数:陀螺仪零偏,加速度计零偏,陀螺仪比例因子,加速度计比例因子4*3=12
GNSS特有参数:对流层湿延迟,接收机钟差(加入了码偏),组合浮点模糊度2+m
 +
+
可以看到GNSS特有参数的系数阵中,接收机钟差对应0,其余对应单位阵。
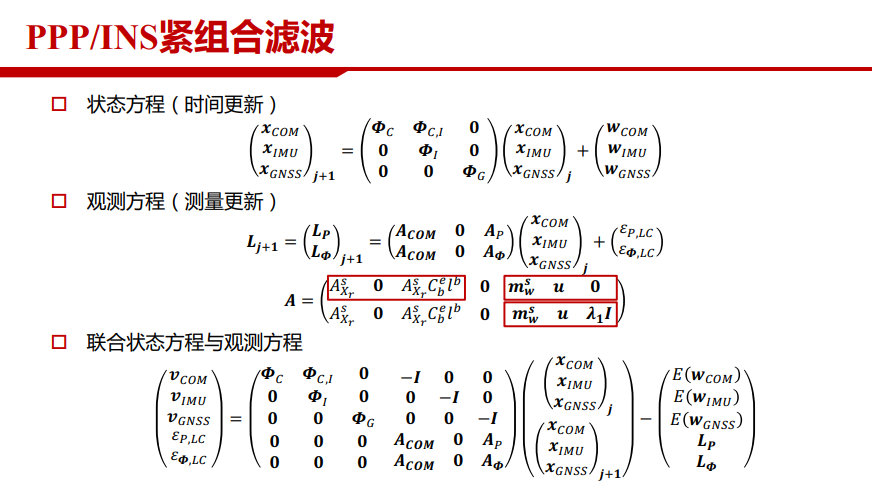
联合状态方程与观测方程后,其形式更加接近我们所熟知的最小二乘,卡尔曼滤波本质上就是最小二乘。
四、松组合与紧组合流程

相关文章:
PPP/INS紧组合算法
前言:在学习紧组合之前学会GNSS/INS松组合是很有必要的,i2NAV团队开源的KF_GINS项目可以作为GNSS/INS松组合学习模板,本文章主要对武汉大学i2NAV发布的PPP/INS紧组合学习资源进行算法层面的总结,链接: 武汉大学多源智…...

【shell】 1、bash语法超详细介绍
文章目录 修改前缀路径dirname set常用函数参数变量local 返回值正则打印第 n 行获取行号核对数据库各表数量jq查询检查日志 sshpassexpect数组xargs bash manual 修改前缀 参考 export PS1"bash> "路径 dirname strip last component from file name dir$(…...
华清远见嵌入式学习——网络编程——作业3
目录 作业要求:基于UDP的TFTP文件传输 代码 下载功能效果图编辑 上传功能效果图 思维导图 模拟面试题和答案(定期更新) 作业要求:基于UDP的TFTP文件传输 完成文件的上传和下载功能 代码 #include<myhead.h>//实现…...
前端学习--React(3)
一、Redux 集中状态管理工具,不需要react即可使用,每个store的数据都是独立于组件之外的 vue小链接:vuex/pinia 基本使用 Redux将数据修改流程分成三个概念,state、action和reducer state - 一个对象 存放我们管理的数据状态 a…...
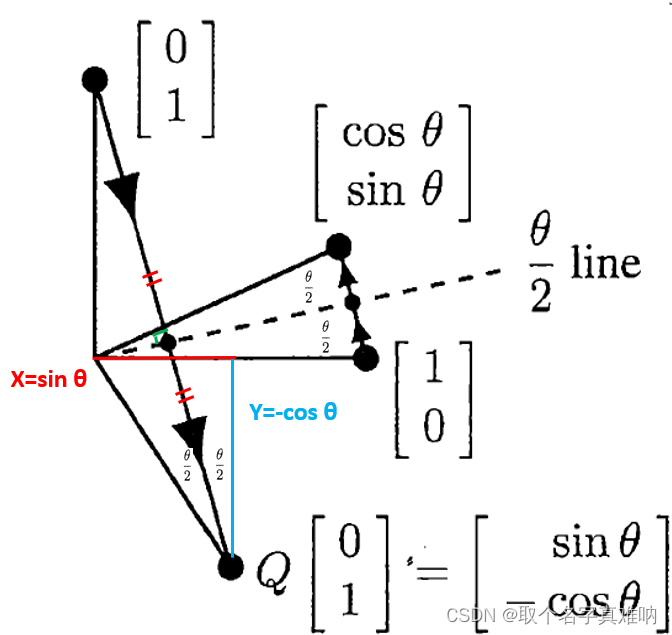
rotation matrix reflection matrix
文章目录 1. rotation matrix1.1 结论 2. reflection matrix2.1 结论 1. rotation matrix 图像逆时针旋转 θ \theta θ的矩阵 Q r o t a t e [ cos θ − sin θ sin θ cos θ ] (1) Q_{rotate}\begin{bmatrix}\cos\theta&-\sin\theta\\\sin\theta&\c…...
Python基础教程: sorted 函数
嗨喽,大家好呀~这里是爱看美女的茜茜呐 sorted 可以对所有可迭代的对象进行排序操作, sorted 方法返回的是一个新的 list,而不是在原来的基础上进行的操作。 从新排序列表。 👇 👇 👇 更多精彩机密、教程…...
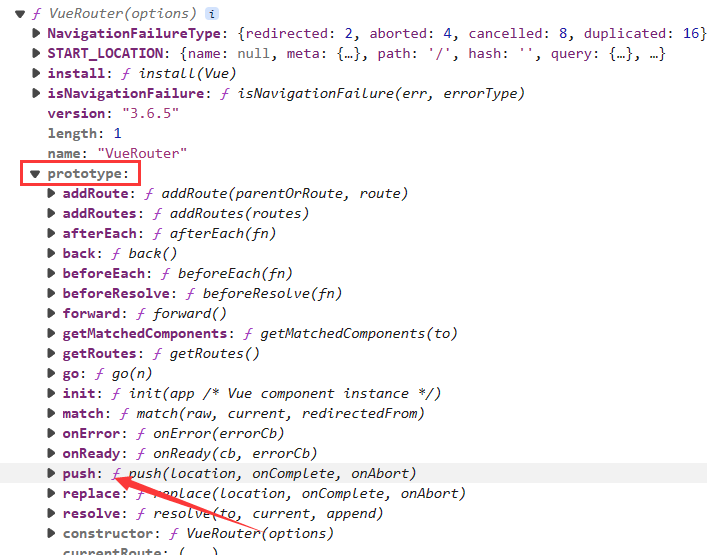
Vue 重写push和replace方法,解决:Avoided redundant navigation to current location
当我们使用编程式路由导航跳转路径时,如果我们两次携带同样的参数进行跳转,会进行页面报错: 那产生这个问题的原因是什么呢? 我们接收并输出调用push方法返回的结果: 会发现这是一个Promise对象 我们都知道ÿ…...

43、vue导出pdf文件,并解决滚动条外内容无法获取的问题
使用插件html2canvas和jspdf插件 下载完两个插件后引入所需要的页面 import html2canvas from "html2canvas" import jsPDF from "jspdf"1、在导出之前将元素的高度或者宽度设置为滚动高度或者宽度,如: el.style.height el.scro…...
牛客 最小公配数 golang版实现
题目请参考: HJ108 求最小公倍数 题解: 在大的数的倍数里面去找最小的能整除另外一个数的数,就是最小公倍数,按照大的来找,循环次数能够降到很少,提升效率 golang实现: package mainimport ("fmt" )func main() {a : …...
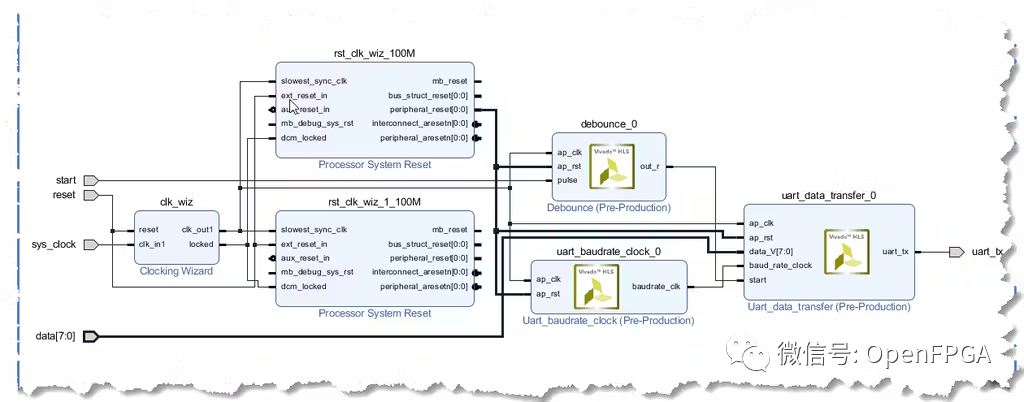
用 HLS 实现 UART
用 HLS 实现 UART 介绍 UART 是一种旧的串行通信机制,但仍在很多平台中使用。它在 HDL 语言中的实现并不棘手,可以被视为本科生的作业。在这里,我将通过这个例子来展示在 HLS 中实现它是多么容易和有趣。 因此,从概念上讲…...

华清远见嵌入式学习——网络编程——作业4
作业要求:①使用IO多路复用中的select函数实现TCP并发服务器客户端 ②使用IO多路复用中的poll函数实现TCP并发服务器的服务器端 一、 代码 #include <myhead.h>#define SERPORT 8888 //服务器端口号 #define SERIP "192.168.114.113"…...
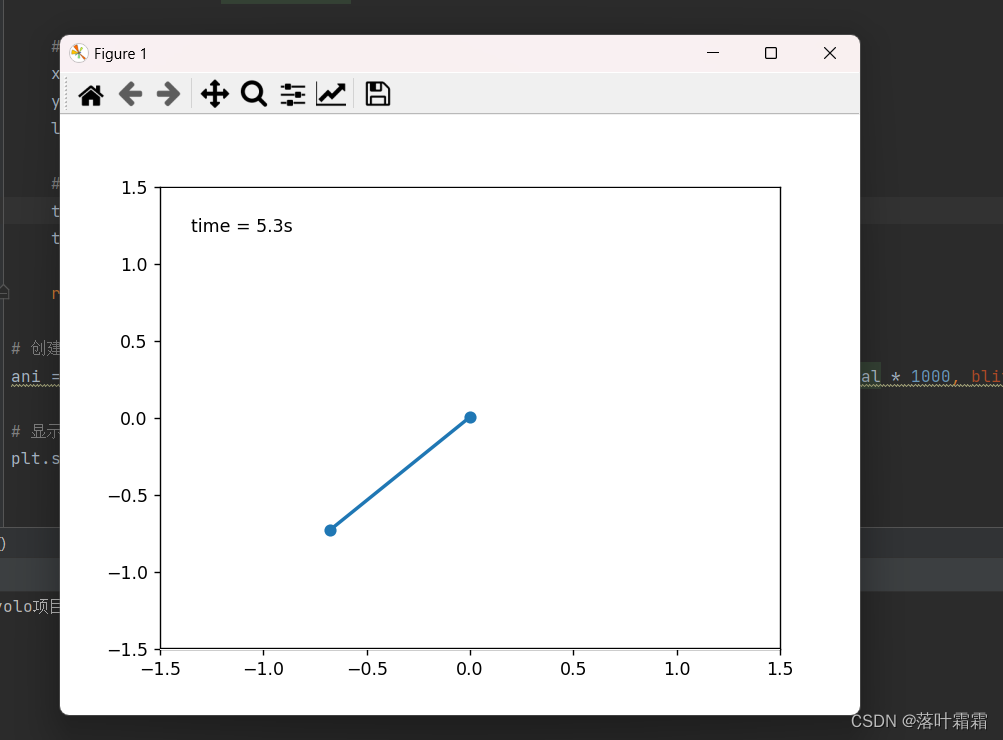
【OpenCV实现图像:制作酷炫的动画效果】
文章目录 概要生成背景图添加点动画添加文本显示小结 概要 首先,通过导入必要的库,包括NumPy用于数学运算和Matplotlib库用于数据可视化。随后,创建图形和轴,初始化点的位置,以及编写初始化函数和更新函数。 初始化函…...

CSS鼠标属性篇
属性名:cursor 功能:设置鼠标光标的样式 属性值: pointer:小手move:移动图标text:文字选择器crosshair:十字架wait:等待help:帮助 eg.html{ cursor: wait;}(此处使用css改…...

交直流一体化电源系统测试步骤详解
交直流一体化电源拥有高度适应性,可以用于不同的电力需求领域。但是为了确保其质量和性能,需要对交直流一体化电源进行各项测试以保证正常工作。本文纳米软件将介绍交直流一体化电源的测试方法,以及如何用交直流一体化电源测试系统进行测试。…...

多数据库使用django-apscheduler时,migrate后并不能生成django_apscheduler_djangojob表的问题
先说一下django-apscheduler定时器的使用过程: django-apscheduler基本使用 1.安装django-apscheduler代码如下(示例): pip install django-apscheduler 2.配置settings.py的INSTALLED_APPS代码如下(示例)…...
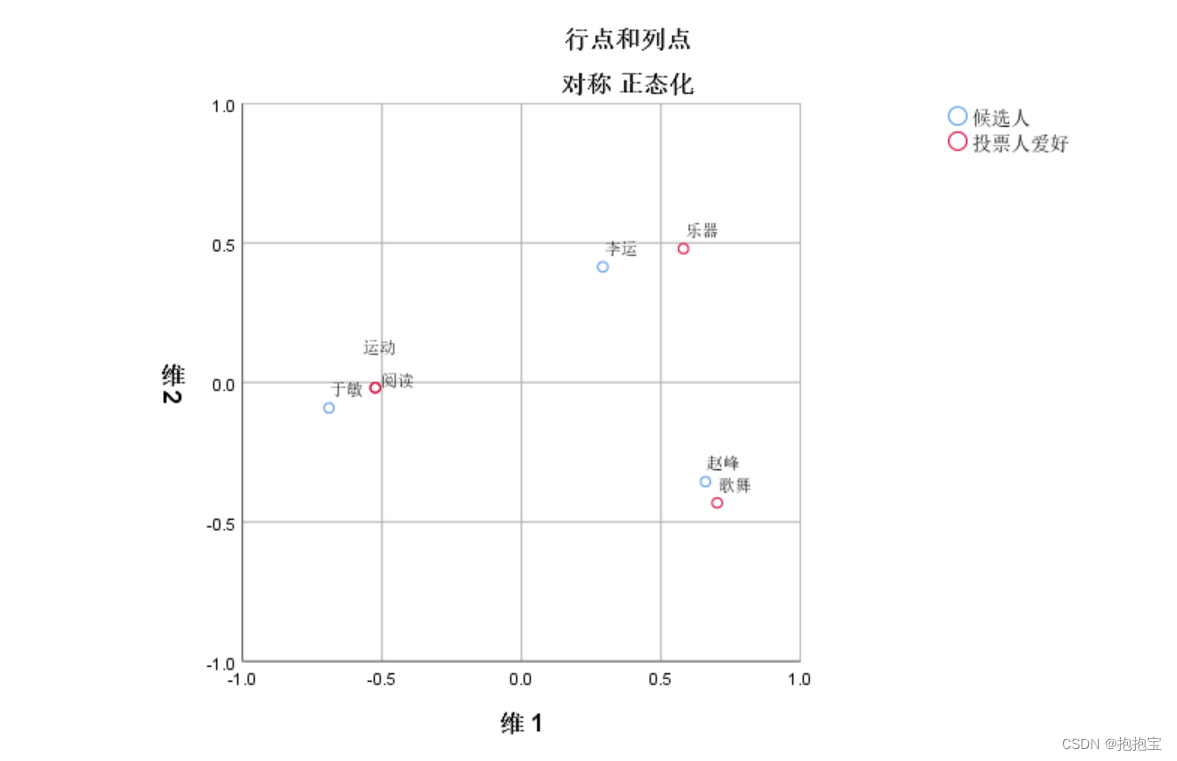
SPS简单对应分析
前言: 本专栏参考教材为《SPSS22.0从入门到精通》,由于软件版本原因,部分内容有所改变,为适应软件版本的变化,特此创作此专栏便于大家学习。本专栏使用软件为:SPSS25.0 本专栏所有的数据文件请点击此链接下…...

智能井盖传感器建设信息化时代智慧城市
近年来随着信息技术的快速发展和城市化进程的加速推进,智慧城市的概念逐渐成为现实。作为智慧城市生命线建设中的重要组成部分,智能井盖传感器的应用正在为城市的可持续发展和居民的生活质量提供新的解决方案。 智能井盖传感器能够实时监测井盖状态&…...
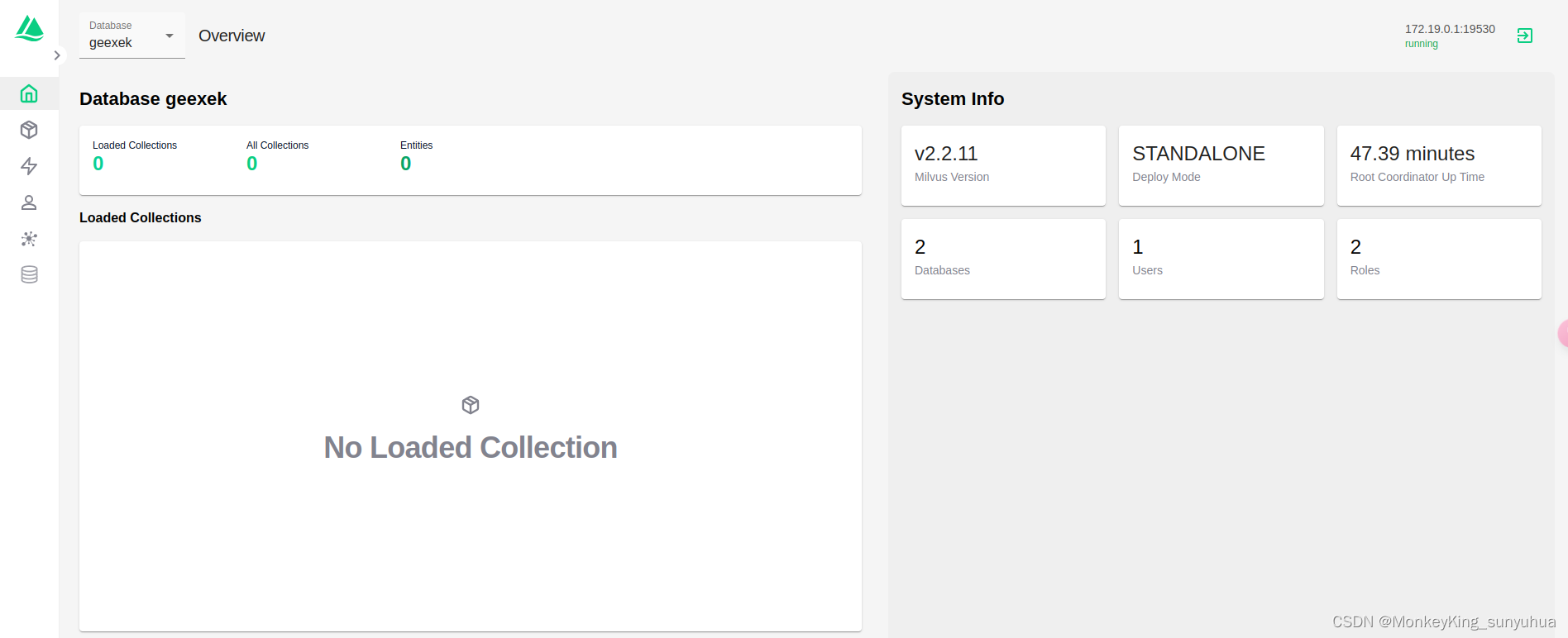
安装向量数据库milvus及其Attu
前置条件安装docker compose 在宿主机上创建文件目录 mkdir -p /home/sunyuhua/milvus/db mkdir -p /home/sunyuhua/milvus/conf mkdir -p /home/sunyuhua/milvus/etcd下载docker-compose.yml wget https://github.com/milvus-io/milvus/releases/download/v2.2.11/milvus-s…...
量子计算概述
目录 1.量子计算介绍 2.量子计算应用 3.量子计算研究机构 1.量子计算介绍 量子计算是一种遵循量子力学规律调控量子信息单元进行计算的新型计算模式。经典计算使用2进制进行运算,但2进制只有0和1两种状态,而量子计算除了包含0和1两种状…...

【车载Java中间件选型红黑榜】:对比12家OEM实测数据,Spring Boot vs OSGi vs AUTOSAR Java Binding谁主沉浮?
更多请点击: https://intelliparadigm.com 第一章:车载Java中间件选型红黑榜:核心结论与行业启示 在智能网联汽车快速演进的背景下,Java生态因成熟度高、跨平台性强及丰富的企业级工具链,正被广泛引入车载信息娱乐系…...
)
用Logit回归预测用户行为:从‘是否购买’到‘偏好等级’的完整建模与解读(附SPSSAU操作截图)
从点击到转化:Logit回归在用户行为预测中的实战指南 当产品经理面对海量用户数据时,最常遇到的困惑是:哪些因素真正影响了用户的购买决策?如何量化不同变量对转化率的影响程度?Logit回归作为分类问题的经典解决方案&am…...

如何重构漫画下载架构:基于Rust+Tauri的高性能异步下载引擎设计
如何重构漫画下载架构:基于RustTauri的高性能异步下载引擎设计 【免费下载链接】picacomic-downloader 哔咔漫画 picacomic pica漫画 bika漫画 PicACG 多线程下载器,带图形界面 带收藏夹,已打包exe 下载速度飞快 项目地址: https://gitcode…...

Windows文件资源管理器STL缩略图:3D模型预览神器让你告别繁琐查看流程
Windows文件资源管理器STL缩略图:3D模型预览神器让你告别繁琐查看流程 【免费下载链接】STL-thumbnail Shellextension for Windows File Explorer to show STL thumbnails 项目地址: https://gitcode.com/gh_mirrors/st/STL-thumbnail 还在为每次查看STL文件…...

OpenGL逻辑学快速入门 卷四 空间与变换:坐标系链条的全部因果
卷四 空间与变换:坐标系链条的全部因果难度 ★★☆ 视角 [CPU][GPU] 优先级 P0(4.1~4.4, 4.6) P1(4.5) P2(4.7) 上一卷你看到一行 gl_Position u_mvp * vec4(a_pos, 1.0)。这一卷把这一行展…...

PX4+FlightGear联合仿真入门:从QGroundControl连接、虚拟摇杆设置到首次飞行实操
PX4FlightGear联合仿真实战:从零操控到首次飞行全解析 当FlightGear的蓝天白云界面在屏幕上展开,而PX4控制台闪烁着待命光标时,许多无人机爱好者会陷入短暂的迷茫——环境搭建只是起点,真正的挑战在于如何让这架虚拟飞机听从指令翱…...

ARM CoreSight ETM11调试技术详解与应用实践
1. ARM CoreSight ETM11技术架构解析作为ARM11处理器家族的核心调试组件,CoreSight ETM11(Embedded Trace Macrocell)采用三级流水线跟踪架构,包含指令采集、数据标记和协议封装三个主要阶段。其创新性地通过硬件级指令插桩技术&a…...

如何永久保存微信聊天记录?WeChatMsg完整指南带你轻松备份珍贵对话
如何永久保存微信聊天记录?WeChatMsg完整指南带你轻松备份珍贵对话 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_Trend…...

微信小程序扫码空白问题的一种情况
现象:微信小程序上传多次,都是成功返回,且生成了二维码图片,但是部分扫码成功,部分打开空白。上传参数是体验版(trial)解决办法:登录微信后台→版本管理→设置最新版本号的开发版为体验版,即可查…...

手把手教你调参:MATLAB中ellipord和ellipap函数设计椭圆滤波器的完整避坑指南
手把手教你调参:MATLAB中ellipord和ellipap函数设计椭圆滤波器的完整避坑指南 在数字信号处理领域,滤波器设计一直是工程师们面临的核心挑战之一。特别是当我们需要在有限的硬件资源下实现陡峭的过渡带特性时,椭圆滤波器往往成为最优选择。不…...