【视觉SLAM十四讲学习笔记】第三讲——Eigen库
专栏系列文章如下:
【视觉SLAM十四讲学习笔记】第一讲——SLAM介绍
【视觉SLAM十四讲学习笔记】第二讲——初识SLAM
【视觉SLAM十四讲学习笔记】第三讲——旋转矩阵
本章将介绍视觉SLAM的基本问题之一:如何描述刚体在三维空间中的运动?
Eigen
Eigen是一个C++开源线性代数库。它提供了快速的有关矩阵的线性代数运算,还包括解方程等功能。
请输入以下命令进行安装:
sudo apt-get install libeigen3-dev
与其他库相比,Eigen的特殊之处在于,它是一个纯用头文件搭建起来的库,这意味着你只能找到它的头文件,而没有类似.so或者.a的二进制文件。在使用时,只需引入Eigen的头文件即可,不需要链接库文件(因为它没有库文件)。接下来对这个库的使用做一些示例:
#include <iostream>using namespace std;#include <ctime>
// Eigen 核心部分
#include <Eigen/Core>
// 稠密矩阵的代数运算(逆,特征值等)
#include <Eigen/Dense>using namespace Eigen;int main(int argc, char **argv) {// Eigen 中所有向量和矩阵都是Eigen::Matrix,它是一个模板类。它的前三个参数为:数据类型,行,列// 声明一个2*3的float矩阵Matrix<float, 2, 3> matrix_23;// 同时,Eigen 通过 typedef 提供了许多内置类型,不过底层仍是Eigen::Matrix// 例如 Vector3d 实质上是 Eigen::Matrix<double, 3, 1>,即三维向量Vector3d v_3d;// 这是一样的Matrix<float, 3, 1> vd_3d;// Matrix3d 实质上是 Eigen::Matrix<double, 3, 3>Matrix3d matrix_33 = Matrix3d::Zero(); //初始化为零// 如果不确定矩阵大小,可以使用动态大小的矩阵Matrix<double, Dynamic, Dynamic> matrix_dynamic;// 更简单的MatrixXd matrix_x;// 这种类型还有很多,我们不一一列举// 下面是对Eigen阵的操作// 输入数据(初始化)matrix_23 << 1, 2, 3, 4, 5, 6;// 输出cout << "matrix 2x3 from 1 to 6: \n" << matrix_23 << endl;// 用()访问矩阵中的元素cout << "print matrix 2x3: " << endl;for (int i = 0; i < 2; i++) {for (int j = 0; j < 3; j++) cout << matrix_23(i, j) << "\t";cout << endl;}return 0;
}
输出结果:
matrix 2x3 from 1 to 6:
1 2 3
4 5 6
print matrix 2x3:
1 2 3
4 5 6
矩阵运算:
#include <iostream>using namespace std;#include <ctime>
#include <Eigen/Core>
#include <Eigen/Dense>using namespace Eigen;int main(int argc, char **argv) {// Eigen 中所有向量和矩阵都是Eigen::Matrix,它是一个模板类。它的前三个参数为:数据类型,行,列// 声明一个2*3的float矩阵Matrix<float, 2, 3> matrix_23;Vector3d v_3d;Matrix<float, 3, 1> vd_3d;// Matrix3d 实质上是 Eigen::Matrix<double, 3, 3>Matrix3d matrix_33 = Matrix3d::Zero(); //初始化为零// 下面是对Eigen阵的操作// 输入数据(初始化)matrix_23 << 1, 2, 3, 4, 5, 6;// 矩阵和向量相乘(实际上仍是矩阵和矩阵)v_3d << 3, 2, 1;vd_3d << 4, 5, 6;// 但是在Eigen里你不能混合两种不同类型的矩阵,像这样是错的// Matrix<double, 2, 1> result_wrong_type = matrix_23 * v_3d;// 应该显式转换Matrix<double, 2, 1> result = matrix_23.cast<double>() * v_3d;cout << "[1,2,3;4,5,6]*[3,2,1]=" << result.transpose() << endl;Matrix<float, 2, 1> result2 = matrix_23 * vd_3d;cout << "[1,2,3;4,5,6]*[4,5,6]: " << result2.transpose() << endl;// 一些矩阵运算// 四则运算就不演示了,直接用+-*/即可。matrix_33 = Matrix3d::Random(); // 随机数矩阵cout << "random matrix: \n" << matrix_33 << endl;cout << "transpose: \n" << matrix_33.transpose() << endl; // 转置cout << "sum: " << matrix_33.sum() << endl; // 各元素和cout << "trace: " << matrix_33.trace() << endl; // 迹cout << "times 10: \n" << 10 * matrix_33 << endl; // 数乘cout << "inverse: \n" << matrix_33.inverse() << endl; // 逆cout << "det: " << matrix_33.determinant() << endl; // 行列式// 特征值// 实对称矩阵可以保证对角化成功SelfAdjointEigenSolver<Matrix3d> eigen_solver(matrix_33.transpose() * matrix_33);cout << "Eigen values = \n" << eigen_solver.eigenvalues() << endl;cout << "Eigen vectors = \n" << eigen_solver.eigenvectors() << endl;return 0;
}
输出结果:
[1,2,3;4,5,6]*[3,2,1]=10 28
[1,2,3;4,5,6]*[4,5,6]: 32 77
random matrix: 0.680375 0.59688 -0.329554
-0.211234 0.823295 0.5364590.566198 -0.604897 -0.444451
transpose: 0.680375 -0.211234 0.5661980.59688 0.823295 -0.604897
-0.329554 0.536459 -0.444451
sum: 1.61307
trace: 1.05922
times 10: 6.80375 5.9688 -3.29554
-2.11234 8.23295 5.364595.66198 -6.04897 -4.44451
inverse:
-0.198521 2.22739 2.83571.00605 -0.555135 -1.41603-1.62213 3.59308 3.28973
det: 0.208598
Eigen values =
0.02428990.9921541.80558
Eigen vectors =
-0.549013 -0.735943 0.3961980.253452 -0.598296 -0.760134
-0.796459 0.316906 -0.514998
解方程:
#include <iostream>
#include <ctime>
#include <Eigen/Core>
#include <Eigen/Dense>
using namespace std;
using namespace Eigen;#define MATRIX_SIZE 50int main(int argc, char **argv) {// 解方程// 我们求解 matrix_NN * x = v_Nd 这个方程// N的大小在前边的宏里定义,它由随机数生成// 直接求逆自然是最直接的,但是求逆运算量大Matrix<double, MATRIX_SIZE, MATRIX_SIZE> matrix_NN= MatrixXd::Random(MATRIX_SIZE, MATRIX_SIZE);matrix_NN = matrix_NN * matrix_NN.transpose(); // 保证半正定Matrix<double, MATRIX_SIZE, 1> v_Nd = MatrixXd::Random(MATRIX_SIZE, 1);clock_t time_stt = clock(); // 计时// 直接求逆Matrix<double, MATRIX_SIZE, 1> x = matrix_NN.inverse() * v_Nd;cout << "time of normal inverse is "<< 1000 * (clock() - time_stt) / (double) CLOCKS_PER_SEC << "ms" << endl;cout << "x = " << x.transpose() << endl;// 通常用矩阵分解来求,例如QR分解,速度会快很多time_stt = clock();x = matrix_NN.colPivHouseholderQr().solve(v_Nd);cout << "time of Qr decomposition is "<< 1000 * (clock() - time_stt) / (double) CLOCKS_PER_SEC << "ms" << endl;cout << "x = " << x.transpose() << endl;// 对于正定矩阵,还可以用cholesky分解来解方程time_stt = clock();x = matrix_NN.ldlt().solve(v_Nd);cout << "time of ldlt decomposition is "<< 1000 * (clock() - time_stt) / (double) CLOCKS_PER_SEC << "ms" << endl;cout << "x = " << x.transpose() << endl;return 0;
}
结果如下:
time of normal inverse is 2.606ms
x = -55.7896 -298.793 130.113 -388.455 -159.312 160.654 -40.0416 -193.561 155.844 181.144 185.125 -62.7786 19.8333 -30.8772 -200.746 55.8385 -206.604 26.3559 -14.6789 122.719 -221.449 26.233 -318.95 -78.6931 50.1446 87.1986 -194.922 132.319 -171.78 -4.19736 11.876 -171.779 48.3047 84.1812 -104.958 -47.2103 -57.4502 -48.9477 -19.4237 28.9419 111.421 92.1237 -288.248 -23.3478 -275.22 -292.062 -92.698 5.96847 -93.6244 109.734
time of Qr decomposition is 3.419ms
x = -55.7896 -298.793 130.113 -388.455 -159.312 160.654 -40.0416 -193.561 155.844 181.144 185.125 -62.7786 19.8333 -30.8772 -200.746 55.8385 -206.604 26.3559 -14.6789 122.719 -221.449 26.233 -318.95 -78.6931 50.1446 87.1986 -194.922 132.319 -171.78 -4.19736 11.876 -171.779 48.3047 84.1812 -104.958 -47.2103 -57.4502 -48.9477 -19.4237 28.9419 111.421 92.1237 -288.248 -23.3478 -275.22 -292.062 -92.698 5.96847 -93.6244 109.734
time of ldlt decomposition is 1.38ms
x = -55.7896 -298.793 130.113 -388.455 -159.312 160.654 -40.0416 -193.561 155.844 181.144 185.125 -62.7786 19.8333 -30.8772 -200.746 55.8385 -206.604 26.3559 -14.6789 122.719 -221.449 26.233 -318.95 -78.6931 50.1446 87.1986 -194.922 132.319 -171.78 -4.19736 11.876 -171.779 48.3047 84.1812 -104.958 -47.2103 -57.4502 -48.9477 -19.4237 28.9419 111.421 92.1237 -288.248 -23.3478 -275.22 -292.062 -92.698 5.96847 -93.6244 109.734
这个例程演示了Eigen矩阵的基本操作与运算。要编译它,需要在CMakeLists.txt里指定Eigen的头文件目录:
#添加头文件
include_directories("/usr/include/eigen3")
因为Eigen库只有头文件,所以不需要再用target_link_libraries语句将程序链接到库上。
相关文章:

【视觉SLAM十四讲学习笔记】第三讲——Eigen库
专栏系列文章如下: 【视觉SLAM十四讲学习笔记】第一讲——SLAM介绍 【视觉SLAM十四讲学习笔记】第二讲——初识SLAM 【视觉SLAM十四讲学习笔记】第三讲——旋转矩阵 本章将介绍视觉SLAM的基本问题之一:如何描述刚体在三维空间中的运动? Eigen…...
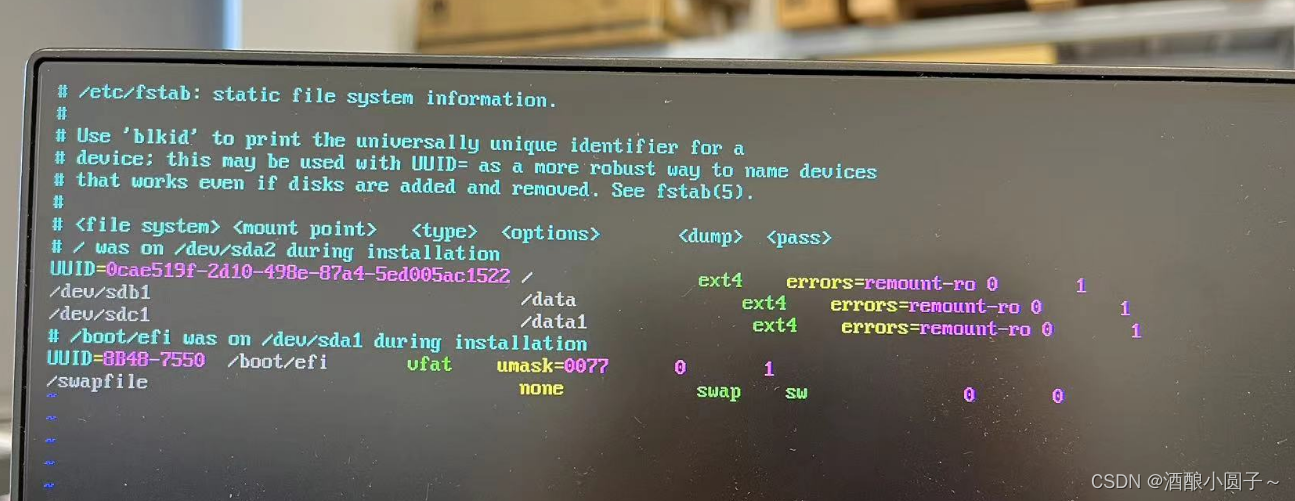
Ubuntu开机显示recovering journal,进入emergency mode
在一次正常的shutdown -r now之后,服务器启动不起来了,登录界面显示recovering journal,主要报错信息如下所示: /dev/sda2:recovering journal /dev/sda2:Clearn... You are in emergency mode. After logging in, type journalc…...

C++_String增删查改模拟实现
C_String增删查改模拟实现 前言一、string默认构造、析构函数、拷贝构造、赋值重载1.1 默认构造1.2 析构函数1.3 拷贝构造1.4 赋值重载 二、迭代器和范围for三、元素相关:operator[ ]四、容量相关:size、resize、capacity、reserve4.1 size、capacity4.2…...
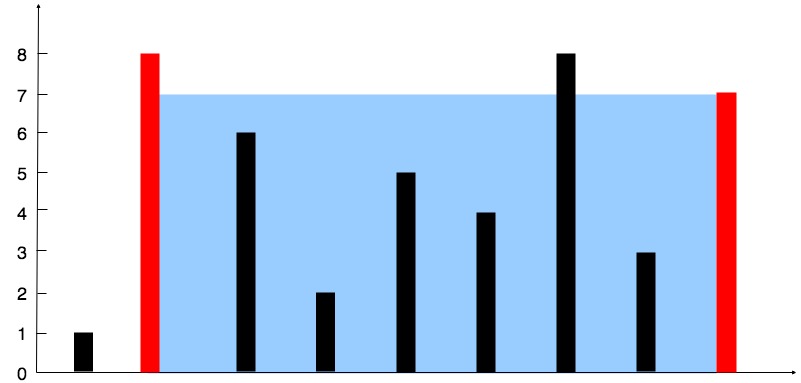
LeeCode前端算法基础100题(2)- 最多水的容器
一、问题详情: 给定一个长度为 n 的整数数组 height 。有 n 条垂线,第 i 条线的两个端点是 (i, 0) 和 (i, height[i]) 。 找出其中的两条线,使得它们与 x 轴共同构成的容器可以容纳最多的水。 返回容器可以储存的最大水量。 说明:…...

排序算法--归并排序
实现逻辑 ① 将序列每相邻两个数字进行归并操作,形成floor(n/2)个序列,排序后每个序列包含两个元素 ② 将上述序列再次归并,形成floor(n/4)个序列,每个序列包含四个元素 ③ 重复步骤②,直到所有元素排序完毕 void pri…...

【LeetCode:1410. HTML 实体解析器 | 模拟+哈希表+字符串+库函数】
🚀 算法题 🚀 🌲 算法刷题专栏 | 面试必备算法 | 面试高频算法 🍀 🌲 越难的东西,越要努力坚持,因为它具有很高的价值,算法就是这样✨ 🌲 作者简介:硕风和炜,…...

基于SSM的公司仓库管理系统(有报告)。Javaee项目
演示视频: 基于SSM的公司仓库管理系统(有报告)。Javaee项目 项目介绍: 采用M(model)V(view)C(controller)三层体系结构,通过Spring SpringMvc …...
spark数据倾斜的解决思路
数据倾斜是:多个分区中,某个分区的数据比其他分区的数据多的多 数据倾斜导致的问题: 导致某个spark任务耗时较长,导致整个任务耗时增加,甚至出现OOM运行速度慢:主要发生在shuffle阶段,同样的k…...
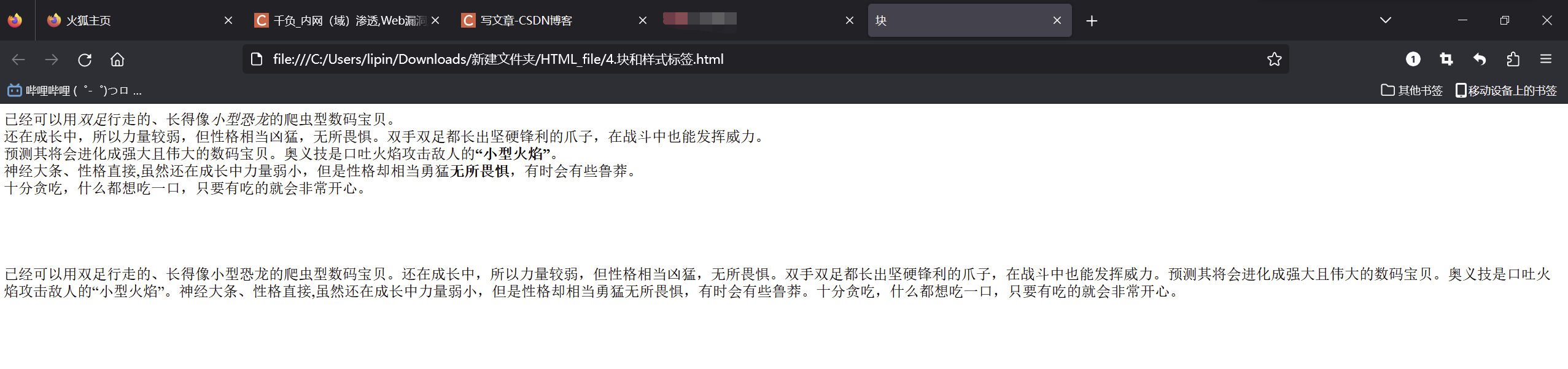
Python武器库开发-前端篇之html概述(二十八)
前端篇之html概述(二十八) html概述 HTML5是构建Web内容的一种语言描述方式。HTML5是互联网的下一代标准,是构建以及呈现互联网内容的一种语言方式.被认为是互联网的核心技术之一。HTML产生于1990年,1997年HTML4成为互联网标准,…...
安防视频EasyCVR平台太阳能供电+4G摄像头视频监控方案的建设
在工地、光伏、风电站、水库河道等场景中,以及一些偏远地区的项目现场,会存在无网无电情况,大大制约了视频监控系统建设的效率及可行性。在这种场景中,我们也可以通过太阳能供电4G监控摄像机的方案,满足偏远地区无网无…...
)
12.位运算的性质(异或的性质)
文章目录 异或的性质求异或和问题[421. 数组中两个数的最大异或值](https://leetcode.cn/problems/maximum-xor-of-two-numbers-in-an-array/)[2935. 找出强数对的最大异或值 II](https://leetcode.cn/problems/maximum-strong-pair-xor-ii/) 异或前缀和问题(最..回…...
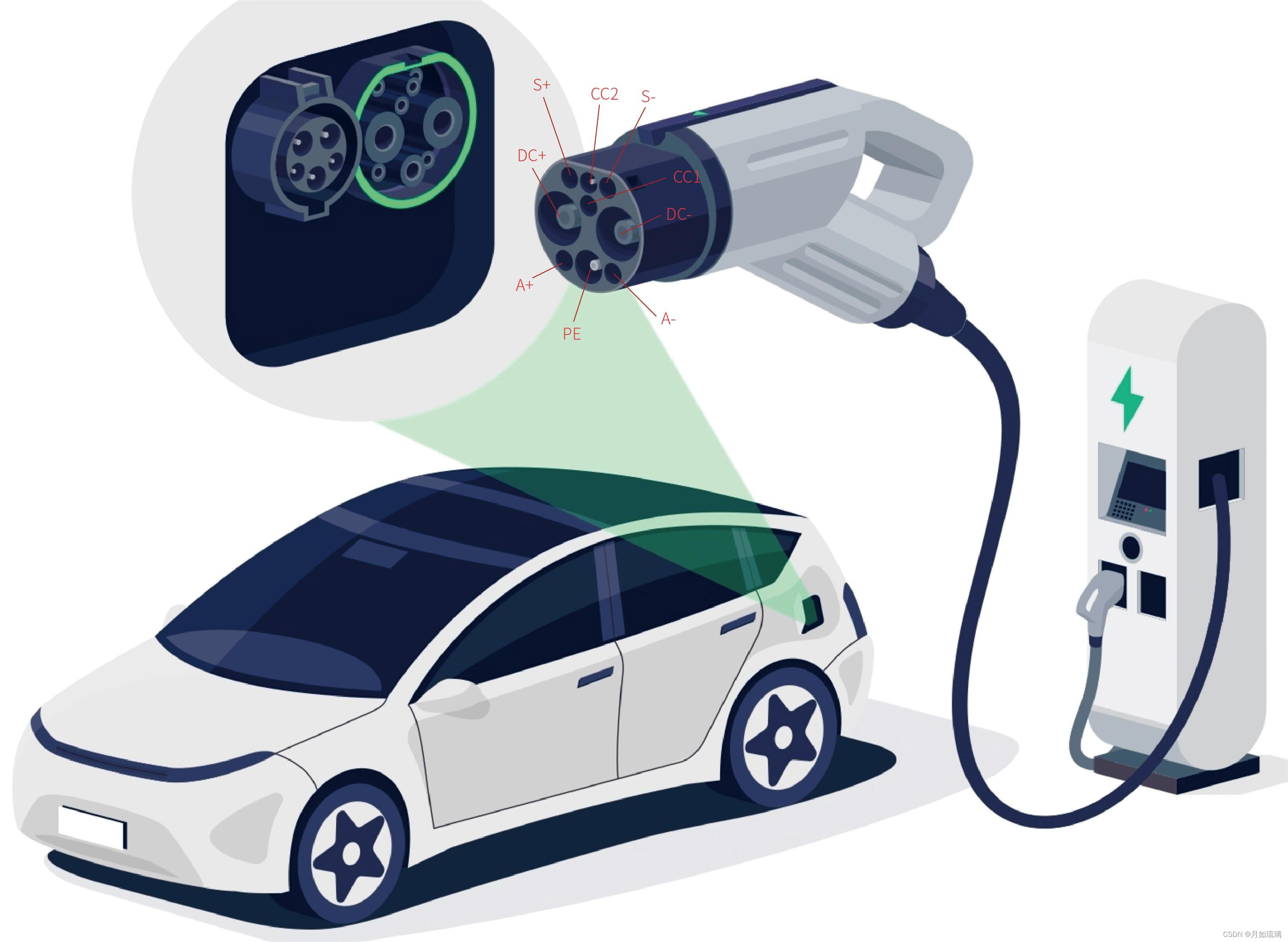
国标直流充电枪9孔分别啥意思?
DC:直流电源正 DC-:直流电源负 PE:接地(搭铁)S:通讯CAN-H S-:通讯CAN-L CC1:充电连接确认 CC2:充电连接确认 A:12V A-:12V- 以上就是国标直流充电…...

关于 Google AMP 和 SEO
Google 于 2015 年首次推出 AMP,即加速移动页面。借助开源 AMP 框架,网页设计师可以制作快速加载的移动网页。该框架的创建是为了应对使用移动设备访问互联网的个人数量的增加。从那时起,谷歌一直在推动使用 AMP 来增强移动设备上的 SEO 和用…...

【SpringMVC】 对请求的不同响应
前言 本文学习如何运用不同的注解来返回不同的响应. 1.返回静态页面Controller 返回index.html页面 Controller 和 RestController的区别 controller 只有加上这个注解,Spring才会帮我们管理这个代码.后续我们访问时才能访问到. RestController 等同于 Controller ResponseBo…...
SQL进阶学习
1.[NISACTF 2022]join-us sql报错注入和联合注入 过滤: as IF rand() LEFT by updatesubstring handler union floor benchmark COLUMN UPDATE & sys.schema_auto_increment_columns && 11 database case AND right CAST FLOOR left updatexml DATABA…...

邦芒解析:做好职场规划防止跳槽失败
为了防止跳槽进入不适合自己的工作环境,你可以采取以下措施: 1、做好调研:在决定跳槽之前,尽可能了解新公司的情况。这包括公司的文化、工作氛围、发展前景以及团队成员之间的关系等。通过搜索公司网站、阅读员工评价以及与公司内…...

基于springboot实现实习管理系统的设计与实现项目【项目源码+论文说明】计算机毕业设计
基于sprinmgboot实现实习管理系统的设计与实现演示 摘要 随着信息化时代的到来,管理系统都趋向于智能化、系统化,实习管理也不例外,但目前国内仍都使用人工管理,市场规模越来越大,同时信息量也越来越庞大,…...

【华为OD题库-031】比赛的冠亚季军-java
题目 有N(3<N<10000)个运动员,他们的id为0到N-1,他们的实力由一组整数表示。他们之间进行比赛,需要决出冠亚军。比赛的规则是0号和1号比赛,2号和3号比赛,以此类推,每一轮,相邻的运动员进行比赛&#…...

电脑如何禁止截屏
禁止电脑截屏是一项重要的安全措施,可以保护用户隐私和防止恶意软件的使用。以下是几种禁止电脑截屏的方法: 形式一: 一刀切,全部禁止截屏 可以在域之盾软件后,点击桌面管理,然后选择禁止截屏。就能禁止所…...
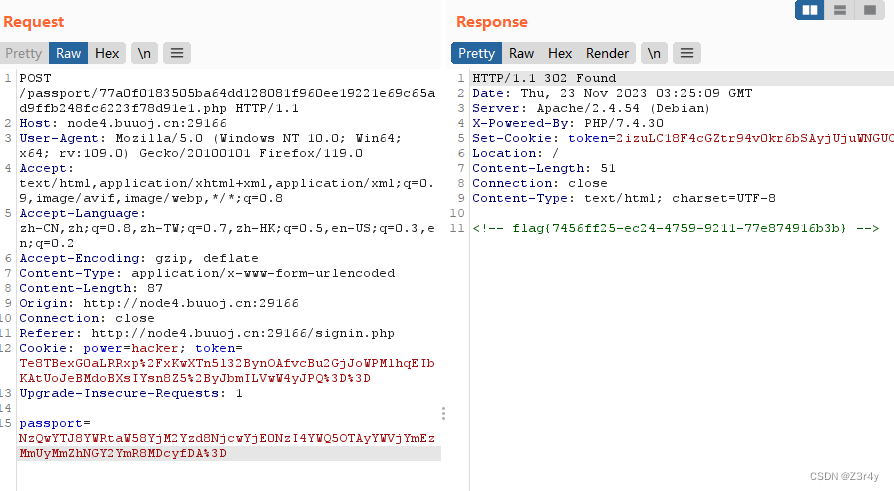
【Web】NewStarCTF Week1 个人复现
目录 ①泄露的秘密 ②Begin of Upload ③Begin of HTTP ④ErrorFlask ⑤Begin of PHP ⑥R!C!E! ⑦EasyLogin ①泄露的秘密 盲猜/robots.txt,访问得到flag前半部分 第二个没试出来,老老实实拿dirsearch扫吧 访问/www.zip 下载附件,拿到第二部分…...
)
为什么你的FP16算子在CUDA 13.2上反而变慢?深度解析Warp Matrix Instructions兼容性陷阱(附NVCC编译参数黄金组合)
更多请点击: https://intelliparadigm.com 第一章:FP16算子性能退化现象与问题定位全景图 在混合精度训练中,FP16(半精度浮点)本应提升计算吞吐并降低显存占用,但实践中常观察到部分算子(如 L…...

投稿踩坑3个月,被拒两次才发现:一开始的选刊方向就错了
上个月终于接到了Accept通知,但回头看这整个投稿周期,真是一把辛酸泪。从去年年底开始投,到今年4月才正式被接收,中间被拒两次,每次审稿都要等一个多月。最难受的不是文章有问题,而是浪费了整整三个月才发现…...

云原生入门系列|第12集:K8s日常运维实战,新手也能稳管集群
前言 各位云原生入门的小伙伴,欢迎继续跟进《云原生入门系列》专栏!上一集我们掌握了K8s故障排查的核心方法,能快速定位并解决Pod、Service、存储等常见故障,避免业务中断。 但K8s的运维不止“排查故障”,更重要的是“日常管理”——就像养花草,不仅要在生病时治病,还…...

智用开物完成近亿元天使+轮融资,多产品矩阵驱动工业场景AI应用落地
硬氪获悉,工业智能体及高价值应用公司智用开物完成近亿元天使轮融资,资金将用于建设“工业语义引擎”及研发制造业高价值岗位智能体。该公司已形成三大产品矩阵,成果获头部客户验证。融资情况 智用开物近日完成近亿元天使轮融资,由…...

2025届最火的五大AI辅助论文助手实测分析
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 于当下学术环境之中,借助人工智能工具去辅助毕业论文撰写已然成了一种趋向&#…...

谷歌 Decoupled DiLoCo:革新分布式训练,高容错低带宽提升超大规模模型训练效率!
弹性 AI 预训练新前沿:谷歌的突破弹性 AI 预训练推进到了下一个前沿,这个突破来自谷歌。他们提出的 Decoupled DiLoCo 是一种革命性的分布式训练技术,能利用全球各地的异构硬件进行训练,即便硬件发生故障,系统也不会停…...
)
别再用记事本了!手把手教你用Python+010 Editor高效解决CTF中的编码乱序问题(以GKCTF签到题为例)
告别记事本:Python与010 Editor打造CTF编码乱序处理流水线 在CTF竞赛中,编码转换和乱序处理类题目往往消耗大量时间在重复性操作上。传统做法是手动复制粘贴到各种在线解码工具,不仅效率低下,还容易在多次转换中丢失关键数据。这次…...
 : 嘉立创EDA 导入、查找、设计管理器(快速寻找网络标签)功能+DRC错误检查和处理)
电路笔记(PCB) : 嘉立创EDA 导入、查找、设计管理器(快速寻找网络标签)功能+DRC错误检查和处理
文章目录导入功能查找功能设计管理器图层查看内电层DRC错误规则设置线距问题填充和焊盘距离太近CG导入功能 查找功能 可查找多种类型,如原件名称、网络标签等 设计管理器 图层查看 内电层 PCB多层板-电源分割PCB - 工具 - 图层管理器 - 内电层绘制线条绘制区域Shif…...

Qwen3.5-9B-GGUF环境部署:Python 3.11+torch28+llama-cpp-python兼容性配置
Qwen3.5-9B-GGUF环境部署:Python 3.11torch28llama-cpp-python兼容性配置 1. 项目介绍 Qwen3.5-9B-GGUF是基于阿里云开源的Qwen3.5-9B模型,经过GGUF格式量化后的轻量级版本。这个90亿参数的稠密模型采用了创新的Gated Delta Networks架构和混合注意力机…...

AI拯救了程序猿!
医生跟我说,可别老坐着不动,不然腰会疼,前列腺也得受影响。还说别老低着头看屏幕, 不然容易得颈椎病,那我这样:医生满脸忧虑地叮嘱我,切不可长时间目不斜视地盯着屏幕,如此这般&…...