Self-Supervised Exploration via Disagreement论文笔记
通过分歧进行自我监督探索
0、问题
使用可微的ri直接去更新动作策略的参数的,那是不是就不需要去计算价值函数或者critic网络了?
1、Motivation
高效的探索是RL中长期存在的问题。以前的大多数方式要么陷入具有随机动力学的环境,要么效率太低,无法扩展到真正的机器人设置。
2、Introduction
然而,在学习无噪声模拟环境之外的预测模型时,有一个关键的挑战:如何处理代理-环境交互的随机性? 随机性可能由以下几个来源引起:(1)嘈杂的环境观察(例如,电视播放噪声);(2)智能体动作执行中的噪声(例如,滑动);(3)作为智能体动作输出的随机性(例如,智能体抛硬币)。
尽管有几种方法可以在低维状态空间中构建随机模型,但将其扩展到高维输入(例如图像)仍然具有挑战性。另一种方法是建立确定性模型,但在随机不变的特征空间中对输入进行编码。最近的工作提出在逆模型特征空间中构建这样的模型,它可以处理随机观测,但当代理本身是噪源时(例如带有遥控器的电视)会失败。
文章提出训练前向动力学模型的集合,并激励智能体探索该集合中模型预测之间存在最大分歧或方差的动作空间。
3、方法
该模型利用预测的不确定性来激励策略访问不确定性最大的状态。
本文模型的核心思想是:歧义。
模型利用采样到的transitions,训练一批前向模型:
{ f θ 1 , f θ 2 … , f θ k } \{f_{\theta_1},f_{\theta_2}\ldots,f_{\theta_k}\} {fθ1,fθ2…,fθk}
这个前向模型与ICM中的forward dynamics model一致,通过最小化loss来更新参数:
l o s s = ∥ f ( x t , a t ; θ ) − x t + 1 ∥ 2 loss=\begin{aligned}\|f(x_t,a_t;\theta)-x_{t+1}\|_2\end{aligned} loss=∥f(xt,at;θ)−xt+1∥2
而本文提出的歧义的核心思想是,对于智能体已经很好地探索过的状态空间,将会收集到足够的数据来训练所有模型,从而导致模型之间的一致,而对于新领域和未探索的领域,所有模型仍然具有很高的预测误差,从而导致对下一个状态预测的分歧。
本文模型将intrinsic reward定义为这种分歧,即不同模型的输出之间的方差:
r t i ≜ E θ [ ∥ f ( x t , a t ; θ ) − E θ [ f ( x t , a t ; θ ) ] ∥ 2 2 ] \begin{aligned}r_t^i\triangleq\mathbb{E}_\theta\Big[\|f(x_t,a_t;\theta)-\mathbb{E}_\theta[f(x_t,a_t;\theta)]\|_2^2\Big]\end{aligned} rti≜Eθ[∥f(xt,at;θ)−Eθ[f(xt,at;θ)]∥22]
在实践中,为了所有的预测目的,我们将状态x编码到嵌入空间φ(x)中。
本文提出的智能体代理是自我监督的,不需要任何外部奖励来进行探索。
本文方法与ICM不同,ICM在足够大的样本后,将趋于平均值。由于均值不同于个体的真实随机状态,预测误差仍然很高,使得智能体永远对随机行为感到好奇。
本模型提出的内在奖励作为一个可微函数,以便使用似然最大化来执行策略优化,这很像监督学习而不是强化学习。来自模型的内在奖励可以非常有效地通知智能体在前向预测损失高的方向改变其行动空间,而不是像强化学习那样提供标量反馈。纯粹是基于当前状态和智能体预测动作的模型集合的心理模拟。
与其通过PPO (RL)最大化期望中的内在奖励,我们可以通过将ri 视为可微损失函数来使用直接梯度来优化策略参数θ:
min θ 1 , … , θ k ( 1 / k ) ∑ i = 1 k ∥ f θ i ( x t , a t ) − x t + 1 ∥ 2 \begin{aligned}\min_{\theta_1,\dots,\theta_k}&(1/k)\sum_{i=1}^k\|f_{\theta_i}(x_t,a_t)-x_{t+1}\|_2\end{aligned} θ1,…,θkmin(1/k)i=1∑k∥fθi(xt,at)−xt+1∥2
max θ P ( 1 / k ) ∑ i = 1 k [ ∥ f θ i ( x t , a t ) − ( 1 / k ) ∑ j = 1 k f θ j ( x t , a t ) ∥ 2 2 ] \begin{aligned}\max_{\theta_P}&(1/k)\sum_{i=1}^k\left[\|f_{\theta_i}(x_t,a_t)-(1/k)\sum_{j=1}^kf_{\theta_j}(x_t,a_t)\|_2^2\right]\end{aligned} θPmax(1/k)i=1∑k[∥fθi(xt,at)−(1/k)j=1∑kfθj(xt,at)∥22]
a t = π ( x t ; θ P ) a_t=\pi(x_t;\theta_P) at=π(xt;θP)
4、实验
实验包括三个部分:a)验证在标准非随机环境下的性能; B)在过渡动力学和观测空间中具有随机性的环境的比较; c)验证我们的目标所促进的可微分政策优化的效率。
- 设计实验测试了Disagreement方法在标准非随机环境下的性能。比较了雅达利游戏的近确定性和非随机标准基准的不同内在奖励公式。基于分歧的方法优于最先进的方法,而不会在非随机情况下失去准确性。
- 在随机性较高的环境下进行测试,基于集合的分歧方法在智能体看到足够的样本后,收敛到几乎为零的内在奖励,而基于预测误差的模型在收敛时也会为具有较高随机性的观测值(即标签为1的图像)分配更多的奖励。基于分歧的方法在存在随机性的情况下表现更好。
- 实验显示可微探索加速了智能体的学习,表明了直接梯度优化的有效性。现在在短期和大结构的行动空间设置中评估仅可微分探索(无强化)的性能。
实验显示可微探索加速了智能体的学习,表明了直接梯度优化的有效性。现在在短期和大结构的行动空间设置中评估仅可微分探索(无强化)的性能。 - 在真实世界的机器手臂实验上,基于分歧的可微分策略优化探索展示出了极高的性能。
相关文章:
Self-Supervised Exploration via Disagreement论文笔记
通过分歧进行自我监督探索 0、问题 使用可微的ri直接去更新动作策略的参数的,那是不是就不需要去计算价值函数或者critic网络了? 1、Motivation 高效的探索是RL中长期存在的问题。以前的大多数方式要么陷入具有随机动力学的环境,要么效率…...

【网络奇幻之旅】那年我与区块链技术的邂逅
🌺个人主页:Dawn黎明开始 🎀系列专栏:网络奇幻之旅 ⭐每日一句:追光的人,终会光芒万丈 📢欢迎大家:关注🔍点赞👍评论📝收藏⭐️ 文章目录 &#…...

1.5.1 git/svn日志格式规范
文章目录 git日志规范一 基本原则二 日志格式1 type:2 keys3 subject4 body5 footergit日志规范 一 基本原则 《规则1》小步提交,每个功能模块分别提交 《规则2》源文件与修改文件,分别提交 《规则3》 二 日志格式 type:keys:subject:body:footer 1 type: - `feat`: 新…...

[autojs]ui线程中更新控件的值的问题
"ui"; ui.layout(<vertical><button id"autoFloatWindow" text"开启悬浮窗" textSize"15sp" /><button id"autoService" text"开启无障碍服务" textSize"15sp" /><button id"…...
机器视觉技术在现代汽车制造中的应用
原创 | 文 BFT机器人 机器视觉技术,利用计算机模拟人眼视觉功能,从图像中提取信息以用于检测、测量和控制,已广泛应用于现代工业,特别是汽车制造业。其主要应用包括视觉测量、视觉引导和视觉检测。 01 视觉测量 视觉测量技术用于…...

学习视频剪辑方法:AI智剪助力,批量处理短视频无忧
随着短视频的兴起,越来越多的人开始关注如何有效地制作和发布这些内容。但是,短视频的制作并不容易,要耗费大量的时间和精力。现在有很多AI智能剪辑工具可以快速、高效地制作短视频。其中,AI智剪是一款非常受欢迎的视频剪辑功能&a…...
振南技术干货集:制冷设备大型IoT监测项目研发纪实(3)
注解目录 1.制冷设备的监测迫在眉睫 1.1 冷食的利润贡献 1.2 冷设监测系统的困难 (制冷设备对于便利店为何如何重要?了解一下你所不知道的便利店和新零售行业。关 于电力线载波通信的论战。) 2、电路设计 2.1 防护电路 2.1.1 强电防护…...

1143. 最长公共子序列
给定两个字符串 text1 和 text2,返回这两个字符串的最长 公共子序列 的长度。如果不存在 公共子序列 ,返回 0 。 一个字符串的 子序列 是指这样一个新的字符串:它是由原字符串在不改变字符的相对顺序的情况下删除某些字符(也可以…...
)
EASYEXCEL(一)
1.读取excel 读监听器 Slf4j public class StudentReadListener extends AnalysisEventListener<Student> {// 每读一样,会调用该invoke方法一次Overridepublic void invoke(Student data, AnalysisContext context) {System.out.println("data "…...

竞赛YOLOv7 目标检测网络解读
文章目录 0 前言1 yolov7的整体结构2 关键点 - backbone关键点 - head3 训练4 使用效果5 最后 0 前言 世界变化太快,YOLOv6还没用熟YOLOv7就来了,如果有同学的毕设项目想用上最新的技术,不妨看看学长的这篇文章,学长带大家简单的…...

第一类曲线积分@对弧长的曲线积分
文章目录 abstract对弧长的曲线积分曲线形构件的质量第一类曲线积分曲线积分存在性利用曲线积分的定义描述曲线形构件质量问题推广曲线积分可加性闭曲线积分 曲线积分性质曲线积分的计算方法证明(部分推导) 小结曲线弧显函数形式方程下的曲线积分公式推广例例例 abstract 在积…...
【TypeScript】常见数据结构与算法(二):链表
文章目录 链表结构(LinkedList)链表以及数组的缺点数组链表的优势 什么是链表?封装链表相关方法源码链表常见面试题237-删除链表中的节点206 - 反转链表 数组和链表的复杂度对比 链表结构(LinkedList) 链表以及数组的缺点 链表…...
)
原型模式 (Prototype Pattern)
定义: 原型模式(Prototype Pattern)是一种创建型设计模式,它用于创建重复的对象,同时保持性能。这种模式的核心思想是通过复制一个已存在的实例来创建新的实例,而不是新建实例并对其进行初始化。原型模式适…...
项目总结报告(案例模板)
软件项目总结报告模板套用: 项目概要项目工作分析经验与教训改进建议可纳入的项目过程资产 --------进主页获取更多资料-------...

C++ Qt QByteArray用法介绍
作者:令狐掌门 技术交流QQ群:675120140 csdn博客:https://mingshiqiang.blog.csdn.net/ 文章目录 一、QByteArray的基本用法1、初始化和赋值2、访问和修改元素3、 常用方法4、数据转换二、QByteArray与文件操作三、QByteArray与网络编程四、QByteArray数据编码1、Base64 编解…...
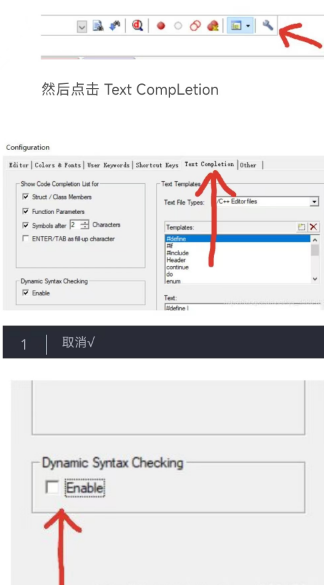
蓝桥杯物联网竞赛_STM32L071_3_Oled显示
地位: 对于任何一门编程语言的学习,print函数毫无疑问是一种最好的调试手段,调试者不仅能通过它获取程序变量的运行状态而且通过对其合理使用获取程序的运行流程,更能通过关键变量的输出帮你验证推理的正确与否,朴素的…...
python-opencv轮廓检测(外轮廓检测和全部轮廓检测,计算轮廓面积和周长)
python-opencv轮廓检测(外轮廓检测和全部轮廓检测,计算轮廓面积和周长) 通过cv2.findContours,我们可以进行轮廓检测,当然也有很多检测模式,我们可以通过选择检测模式,进行外轮廓检测ÿ…...

LeetCode [简单] 1. 两数之和
给定一个整数数组 nums 和一个整数目标值 target,请你在该数组中找出 和为目标值 target 的那 两个 整数,并返回它们的数组下标。 你可以假设每种输入只会对应一个答案。但是,数组中同一个元素在答案里不能重复出现。 你可以按任意顺序返回…...
C++设计模式之工厂模式(下)——抽象工厂模式
抽象工厂模式 介绍示例示例使用运行结果抽象工厂模式的优缺点优点缺点 总结 介绍 抽象工厂模式是一种创建型设计模式,它提供了一种封装一组相关或相互依赖对象的方式,而无需指定它们具体的类。它允许客户端使用抽象接口来创建一系列相关的对象ÿ…...
2023亚太杯数学建模A题思路分析 - 采果机器人的图像识别技术
1 赛题 问题A 采果机器人的图像识别技术 中国是世界上最大的苹果生产国,年产量约为3500万吨。与此同时,中国也是世 界上最大的苹果出口国,全球每两个苹果中就有一个,全球超过六分之一的苹果出口 自中国。中国提出了一带一路倡议…...

给嵌入式开发者的RISC-V vs ARM实战选型指南:从开源生态到芯片采购的5个关键考量
RISC-V与ARM嵌入式开发实战选型指南:5个关键决策维度深度解析 当你在设计下一代智能门锁时,是选择RISC-V的灵活定制还是ARM的成熟稳定?这个看似简单的技术选型问题,实际上关乎产品未来三年的维护成本和市场竞争力。去年某家电厂商…...

S32K148的FlexCAN FD从零到跑通:基于S32KDS 2.2和SDK 3.0.0的保姆级配置流程
S32K148的FlexCAN FD从零到跑通:基于S32KDS 2.2和SDK 3.0.0的保姆级配置流程 对于刚接触NXP S32K系列微控制器的开发者来说,FlexCAN FD模块的配置往往是一个令人头疼的挑战。本文将带你从零开始,一步步完成S32K148开发板上FlexCAN FD模块的完…...
)
RTX 4090显卡深度学习环境配置:从Anaconda到PyTorch的完整流程(Win11+CUDA11.7.0)
RTX 4090深度学习环境配置实战:从零搭建高效开发环境 引言 对于深度学习研究者和开发者来说,一台配置得当的工作站是高效工作的基础。RTX 4090作为NVIDIA最新一代消费级显卡,凭借其强大的计算能力和24GB显存,已经成为许多深度学…...

揭秘低查重AI教材编写秘籍,AI写教材工具助你高效完成专业教材!
在教材编写过程中,如何平衡原创性与合规性是一个新的挑战。许多创作者往往在借鉴优秀教材的内容时,难免担心查重率超出标准;而在尝试独立撰写知识点时,又会顾虑逻辑是否严谨、信息是否准确。更重要的是,当引用他人的研…...

用STM32F103RCT6驱动4寸ST7796S屏,从接线到显示图片的保姆级教程
STM32F103RCT6驱动4寸ST7796S液晶屏全流程实战指南 第一次拿到STM32开发板和4寸液晶屏时,看着密密麻麻的引脚和陌生的专业术语,确实容易让人望而生畏。但别担心,本文将手把手带你完成从硬件连接到软件调试的全过程。不同于简单的代码复制粘贴…...

从‘被动挨打’到‘主动防御’:我是如何用洞态IAST把安全测试无缝塞进团队DevOps流水线的
从被动防御到主动出击:洞态IAST在DevOps流水线中的实战集成指南 当我们的微服务架构从最初的十几个模块扩展到上百个服务时,传统的安全测试方法开始显露出明显的瓶颈。记得有一次凌晨三点,运维团队紧急回滚了一个刚上线的支付服务——安全团队…...

告别小程序富文本难题:mp-html组件实战指南
告别小程序富文本难题:mp-html组件实战指南 【免费下载链接】mp-html 小程序富文本组件,支持渲染和编辑 html,支持在微信、QQ、百度、支付宝、头条和 uni-app 平台使用 项目地址: https://gitcode.com/gh_mirrors/mp/mp-html 在小程序…...

如何用 Go-retryablehttp 实现指数退避算法:网络重试的最佳实践
如何用 Go-retryablehttp 实现指数退避算法:网络重试的最佳实践 【免费下载链接】go-retryablehttp Retryable HTTP client in Go 项目地址: https://gitcode.com/gh_mirrors/go/go-retryablehttp 在网络请求中,暂时性故障如服务器过载或网络波动…...

终极Windows优化工具:如何用WinUtil一键解决系统管理和软件安装所有难题
终极Windows优化工具:如何用WinUtil一键解决系统管理和软件安装所有难题 【免费下载链接】winutil Chris Titus Techs Windows Utility - Install Programs, Tweaks, Fixes, and Updates 项目地址: https://gitcode.com/GitHub_Trending/wi/winutil 你是否也…...

从Fiori App反推CDS视图:手把手教你定位SAP S/4HANA标准OData服务背后的数据模型
从Fiori App反推CDS视图:手把手教你定位SAP S/4HANA标准OData服务背后的数据模型 当你在SAP S/4HANA环境中配置或增强标准Fiori应用时,经常会遇到需要深入理解其底层数据模型的情况。本文将带你一步步逆向工程,从Fiori应用界面出发ÿ…...