U-boot(四):start_armboot
本文主要探讨210的uboot启动的第二阶段,主要函数为start_armboot。
uboot
一阶段初始化SoC内部部件(看门狗、时钟等),初始化DDR,重定位
二阶段初始化其余硬件(iNand、网卡芯片···)以及命令、环境变量等···
启动打印硬件信息,进入bootdelay,读秒完后执行bootcmd启动内核或打断读秒进入命名状态
一阶段为汇编,在SRAM中,主要在SoC内部,二阶段为C阶,在DRAM中,主要在Board内部
start_armboot(函数在uboot/lib_arm/board.c(444~908))
全局变量
全局变量定义
#define DECLARE_GLOBAL_DATA_PTR register volatile gd_t *gd asm ("r8") typedef struct global_data {bd_t *bd;unsigned long flags;unsigned long baudrate;unsigned long have_console; /* serial_init() was called */unsigned long reloc_off; /* Relocation Offset */unsigned long env_addr; /* Address of Environment struct */unsigned long env_valid; /* Checksum of Environment valid? */unsigned long fb_base; /* base address of frame buffer */#ifdef CONFIG_VFDunsigned char vfd_type; /* display type */#endif#if 0unsigned long cpu_clk; /* CPU clock in Hz! */unsigned long bus_clk;phys_size_t ram_size; /* RAM size */unsigned long reset_status; /* reset status register at boot */#endifvoid **jt; /* jump table */} gd_t;
定义全局变量gd到寄存器r8中,为gd_t类型变量指针
gd_t定义在include/asm-arm/global_data.h中
gd_t中定义全局变量,其中bd_t结构体包含硬件参数(波特率,IP,mac,机器码,启动参数,环境变量,DDR,网卡)
全局变量内存分配
#ifdef CONFIG_MEMORY_UPPER_CODE /* by scsuh */ulong gd_base;gd_base = CFG_UBOOT_BASE + CFG_UBOOT_SIZE - CFG_MALLOC_LEN - CFG_STACK_SIZE - sizeof(gd_t);#ifdef CONFIG_USE_IRQgd_base -= (CONFIG_STACKSIZE_IRQ+CONFIG_STACKSIZE_FIQ);#endifgd = (gd_t*)gd_base;#elsegd = (gd_t*)(_armboot_start - CFG_MALLOC_LEN - sizeof(gd_t));#endifgd_base = CFG_UBOOT_BASE + CFG_UBOOT_SIZE - CFG_MALLOC_LEN - CFG_STACK_SIZE - sizeof(gd_t);gd = (gd_t*)gd_base; #define CFG_UBOOT_BASE 0xc3e00000 #define CFG_UBOOT_SIZE (2*1024*1024) #define CFG_MALLOC_LEN (CFG_ENV_SIZE + 896*1024) #define CFG_ENV_SIZE 0x4000 //(16字节)#define CFG_STACK_SIZE 512*1024
uboot CFG_UBOOT_BASE(2MB)
堆 CFG_MALLOC_LEN(912KB)
栈 CFG_STACK_SIZE(512KB)
gd sizeof(gd_t)(36字节)
bd sizeof(bd_t)(44字节左右)
全局变量内存清空
__asm__ __volatile__("": : :"memory");memset ((void*)gd, 0, sizeof (gd_t));gd->bd = (bd_t*)((char*)gd - sizeof(bd_t));memset (gd->bd, 0, sizeof (bd_t));monitor_flash_len = _bss_start - _armboot_start;
board级硬件初始化
init_fnc_t **init_fnc_ptr;typedef int (init_fnc_t) (void); //函数类型init_fnc_ptr是二重函数指针,用来指向函数指针数组
for (init_fnc_ptr = init_sequence; *init_fnc_ptr; ++init_fnc_ptr) {if ((*init_fnc_ptr)() != 0) {hang ();}}
init_fnc_t *init_sequence[] = {cpu_init, /* basic cpu dependent setup */#if defined(CONFIG_SKIP_RELOCATE_UBOOT)reloc_init, /* Set the relocation done flag, mustdo this AFTER cpu_init(), but as soonas possible */#endifboard_init, /* basic board dependent setup */interrupt_init, /* set up exceptions */env_init, /* initialize environment */init_baudrate, /* initialze baudrate settings */serial_init, /* serial communications setup */console_init_f, /* stage 1 init of console */display_banner, /* say that we are here */#if defined(CONFIG_DISPLAY_CPUINFO)print_cpuinfo, /* display cpu info (and speed) */#endif#if defined(CONFIG_DISPLAY_BOARDINFO)checkboard, /* display board info */#endif#if defined(CONFIG_HARD_I2C) || defined(CONFIG_SOFT_I2C)init_func_i2c,#endifdram_init, /* configure available RAM banks */display_dram_config,NULL,};cpu_init
int cpu_init (void){/** setup up stacks if necessary*/#ifdef CONFIG_USE_IRQIRQ_STACK_START = _armboot_start - CFG_MALLOC_LEN - CFG_GBL_DATA_SIZE - 4;FIQ_STACK_START = IRQ_STACK_START - CONFIG_STACKSIZE_IRQ;#endifreturn 0;}空函数,cpu初始化在一阶段cpu_init_crit函数中完成(汇编)
board_init(uboot/board/samsung/x210/x210.c)
int board_init(void){DECLARE_GLOBAL_DATA_PTR;#ifdef CONFIG_DRIVER_SMC911Xsmc9115_pre_init();#endif#ifdef CONFIG_DRIVER_DM9000dm9000_pre_init();#endifgd->bd->bi_arch_number = MACH_TYPE;gd->bd->bi_boot_params = (PHYS_SDRAM_1+0x100);return 0;} static void dm9000_pre_init(void){unsigned int tmp;#if defined(DM9000_16BIT_DATA)SROM_BW_REG &= ~(0xf << 4);SROM_BW_REG |= (1<<7) | (1<<6) | (1<<5) | (1<<4);#elseSROM_BW_REG &= ~(0xf << 4);SROM_BW_REG |= (0<<6) | (0<<5) | (0<<4);#endifSROM_BC1_REG = ((0<<28)|(1<<24)|(5<<16)|(1<<12)|(4<<8)|(6<<4)|(0<<0));//uboot//SROM_BC1_REG = ((0<<28)|(0<<24)|(5<<16)|(0<<12)|(0<<8)|(0<<4)|(0<<0));//kerneltmp = MP01CON_REG;tmp &=~(0xf<<4);tmp |=(2<<4);MP01CON_REG = tmp;}
dm9000_pre_init函数为网卡初始化(GPIO和端口配置非驱动),gd->bd->bi_arch_number定义机器码,gd->bd->bi_boot_params为内核启动传递参数内存地址(0x30000100)
gd->bd->bi_boot_params = (PHYS_SDRAM_1+0x100);
#define CONFIG_NR_DRAM_BANKS 2 /* we have 2 bank of DRAM */#define SDRAM_BANK_SIZE 0x10000000 //256 /*0x20000000*/ /* 512 MB */#define PHYS_SDRAM_1 MEMORY_BASE_ADDRESS /* SDRAM Bank #1 */#define PHYS_SDRAM_1_SIZE SDRAM_BANK_SIZE#define PHYS_SDRAM_2 MEMORY_BASE_ADDRESS2 /* SDRAM Bank #2 */#define PHYS_SDRAM_2_SIZE SDRAM_BANK_SIZE #define CFG_FLASH_BASE 0x80000000#define MEMORY_BASE_ADDRESS 0x30000000 一阶段汇编lowlevel_init初始化DDR为硬件初始化(gpio),DDR可工作,此处为DDR属性配置、地址初始化
x210_sd.h(496~501)宏定义DDR参数(内存个数,内存起始地址,内存长度)
interrupt_init
int interrupt_init(void){S5PC11X_TIMERS *const timers = S5PC11X_GetBase_TIMERS();/* use PWM Timer 4 because it has no output *//* prescaler for Timer 4 is 16 */timers->TCFG0 = 0x0f00;if (timer_load_val == 0) {/** for 10 ms clock period @ PCLK with 4 bit divider = 1/2* (default) and prescaler = 16. Should be 10390* @33.25MHz and @ 66 MHz*/timer_load_val = get_PCLK() / (16 * 100);}/* load value for 10 ms timeout */lastdec = timers->TCNTB4 = timer_load_val;/* auto load, manual update of Timer 4 */timers->TCON = (timers->TCON & ~0x00700000) | TCON_4_AUTO | TCON_4_UPDATE;/* auto load, start Timer 4 */timers->TCON = (timers->TCON & ~0x00700000) | TCON_4_AUTO | COUNT_4_ON;timestamp = 0;return (0);}初始化定时器(Timer4),210有5个PWM定时器,Timer0-timer3对应PWM信号输出引脚,Timer4无引脚用来做计时
env_init
int env_init(void){#if defined(ENV_IS_EMBEDDED)ulong total;int crc1_ok = 0, crc2_ok = 0;env_t *tmp_env1, *tmp_env2;total = CFG_ENV_SIZE;tmp_env1 = env_ptr;tmp_env2 = (env_t *)((ulong)env_ptr + CFG_ENV_SIZE);crc1_ok = (crc32(0, tmp_env1->data, ENV_SIZE) == tmp_env1->crc);crc2_ok = (crc32(0, tmp_env2->data, ENV_SIZE) == tmp_env2->crc);if (!crc1_ok && !crc2_ok)gd->env_valid = 0;else if(crc1_ok && !crc2_ok)gd->env_valid = 1;else if(!crc1_ok && crc2_ok)gd->env_valid = 2;else {/* both ok - check serial */if(tmp_env1->flags == 255 && tmp_env2->flags == 0)gd->env_valid = 2;else if(tmp_env2->flags == 255 && tmp_env1->flags == 0)gd->env_valid = 1;else if(tmp_env1->flags > tmp_env2->flags)gd->env_valid = 1;else if(tmp_env2->flags > tmp_env1->flags)gd->env_valid = 2;else /* flags are equal - almost impossible */gd->env_valid = 1;}if (gd->env_valid == 1)env_ptr = tmp_env1;else if (gd->env_valid == 2)env_ptr = tmp_env2;#else /* ENV_IS_EMBEDDED */gd->env_addr = (ulong)&default_environment[0];gd->env_valid = 1;#endif /* ENV_IS_EMBEDDED */return (0);}
环境变量初始化,开发板可能包含不同启动介质(norflash、nandflash、inand、sd卡·····),故env的存取需要支持多种存储方式,210使用的为inand(env_movi.c)
函数有无环境变量(无),start_armboot函数(776)调用env_relocate将环境变量从SD卡重定位到DDR,重定位从SD卡中读取
/* initialize environment */env_relocate ();
init_baudrate
static int init_baudrate (void){char tmp[64]; /* long enough for environment variables */int i = getenv_r ("baudrate", tmp, sizeof (tmp));gd->bd->bi_baudrate = gd->baudrate = (i > 0)? (int) simple_strtoul (tmp, NULL, 10): CONFIG_BAUDRATE;return (0);}int getenv_r (char *name, char *buf, unsigned len){int i, nxt;for (i=0; env_get_char(i) != '\0'; i=nxt+1) {int val, n;for (nxt=i; env_get_char(nxt) != '\0'; ++nxt) {if (nxt >= CFG_ENV_SIZE) {return (-1);}}if ((val=envmatch((uchar *)name, i)) < 0)continue;/* found; copy out */n = 0;while ((len > n++) && (*buf++ = env_get_char(val++)) != '\0');if (len == n)*buf = '\0';return (n);}return (-1);} 初始化串口通信的波特率,getenv_r函数读取环境变量值,读取环境变量值为字符串类型在转成相应类型(simple_strtoul将字符串转int)
读取环境变量中波特率值(gd->baudrate,gd->bd->bi_baudrate),若没有则在x210_sd.h中CONFIG_BAUDRATE值作为波特率(环境变量优先级高)
serial_init
int serial_init(void){serial_setbrg();return (0);}空函数,一阶段汇编lowlevel_init中uart_asm_init初始化串口console_init_fint console_init_f (void){gd->have_console = 1;#ifdef CONFIG_SILENT_CONSOLEif (getenv("silent") != NULL)gd->flags |= GD_FLG_SILENT;#endifreturn (0);}console_init_f是console(控制台)一阶段初始化
display_banner
static int display_banner (void){printf ("\n\n%s\n\n", version_string);debug ("U-Boot code: %08lX -> %08lX BSS: -> %08lX\n",_armboot_start, _bss_start, _bss_end);#ifdef CONFIG_MEMORY_UPPER_CODE /* by scsuh */debug("\t\bMalloc and Stack is above the U-Boot Code.\n");#elsedebug("\t\bMalloc and Stack is below the U-Boot Code.\n");#endif#ifdef CONFIG_MODEM_SUPPORTdebug ("Modem Support enabled\n");#endif#ifdef CONFIG_USE_IRQdebug ("IRQ Stack: %08lx\n", IRQ_STACK_START);debug ("FIQ Stack: %08lx\n", FIQ_STACK_START);#endifopen_backlight();//lqm.//open_gprs();return (0);}串口输出显示uboot的logo,U_BOOT_VERSION在makefile中定义,编译时生成到include/version_autogenerated.h的宏中
print_cpuinfo
int print_cpuinfo(void){uint set_speed;uint tmp;uchar result_set;#if defined(CONFIG_CLK_533_133_100_100)set_speed = 53300;#elif defined(CONFIG_CLK_667_166_166_133)set_speed = 66700;#elif defined(CONFIG_CLK_800_200_166_133)set_speed = 80000;#elif defined(CONFIG_CLK_1000_200_166_133)set_speed = 100000;#elif defined(CONFIG_CLK_1200_200_166_133)set_speed = 120000;#elseset_speed = 100000;printf("Any CONFIG_CLK_XXX is not enabled\n");#endiftmp = (set_speed / (get_ARMCLK()/1000000));if((tmp < 105) && (tmp > 95)){result_set = 1;} else {result_set = 0;}#ifdef CONFIG_MCP_SINGLEprintf("\nCPU: S5PV210@%ldMHz(%s)\n", get_ARMCLK()/1000000, ((result_set == 1) ? "OK" : "FAIL"));#elseprintf("\nCPU: S5PC110@%ldMHz(%s)\n", get_ARMCLK()/1000000, ((result_set == 1) ? "OK" : "FAIL"));#endifprintf(" APLL = %ldMHz, HclkMsys = %ldMHz, PclkMsys = %ldMHz\n",get_FCLK()/1000000, get_HCLK()/1000000, get_PCLK()/1000000);#if 1printf(" MPLL = %ldMHz, EPLL = %ldMHz\n",get_MPLL_CLK()/1000000, get_PLLCLK(EPLL)/1000000);printf(" HclkDsys = %ldMHz, PclkDsys = %ldMHz\n",get_HCLKD()/1000000, get_PCLKD()/1000000);printf(" HclkPsys = %ldMHz, PclkPsys = %ldMHz\n",get_HCLKP()/1000000, get_PCLKP()/1000000);printf(" SCLKA2M = %ldMHz\n", get_SCLKA2M()/1000000);#endifputs("Serial = CLKUART ");return 0;
}CPU: S5PV210@1000MHz(OK)
APLL = 1000MHz, HclkMsys = 200MHz, PclkMsys = 100MHz
MPLL = 667MHz, EPLL = 96MHz
HclkDsys = 166MHz, PclkDsys = 83MHz
HclkPsys = 133MHz, PclkPsys = 66MHz
SCLKA2M = 200MHz
Serial = CLKUART print_cpuinfo打印uboot启动时的cpu参数信息
checkboard
int checkboard(void){#ifdef CONFIG_MCP_SINGLE#if defined(CONFIG_VOGUES)printf("\nBoard: VOGUESV210\n");#elseprintf("\nBoard: X210\n");#endif //CONFIG_VOGUES#elseprintf("\nBoard: X210\n");#endifreturn (0);}打印开发板名字
init_func_i2c
static int init_func_i2c (void){puts ("I2C: ");i2c_init (CFG_I2C_SPEED, CFG_I2C_SLAVE);puts ("ready\n");return (0);}
X210的uboot未使用I2C,此函数无用
dram_init
int dram_init(void){DECLARE_GLOBAL_DATA_PTR;gd->bd->bi_dram[0].start = PHYS_SDRAM_1;gd->bd->bi_dram[0].size = PHYS_SDRAM_1_SIZE;#if defined(PHYS_SDRAM_2)gd->bd->bi_dram[1].start = PHYS_SDRAM_2;gd->bd->bi_dram[1].size = PHYS_SDRAM_2_SIZE;#endif#if defined(PHYS_SDRAM_3)gd->bd->bi_dram[2].start = PHYS_SDRAM_3;gd->bd->bi_dram[2].size = PHYS_SDRAM_3_SIZE;#endifreturn 0;}dram_init在一阶段初始化low_level_init中初始化,此处为给全局变量定义赋值,记录DDR配置(gd->bd->bi_dram)
display_dram_config
static int display_dram_config (void){int i;#ifdef DEBUGputs ("RAM Configuration:\n");for(i=0; i<CONFIG_NR_DRAM_BANKS; i++) {printf ("Bank #%d: %08lx ", i, gd->bd->bi_dram[i].start);print_size (gd->bd->bi_dram[i].size, "\n");}#elseulong size = 0;for (i=0; i<CONFIG_NR_DRAM_BANKS; i++) {size += gd->bd->bi_dram[i].size;}puts("DRAM: ");print_size(size, "\n");#endifreturn (0);}
打印显示dram配置信息,uboot启动信息(DRAM: 512 MB)在该处打印
uboot命令bdinfo,打印的位gd->bd中记录硬件全局变量(DDR信息)
DRAM bank = 0x00000000-> start = 0x30000000-> size = 0x10000000DRAM bank = 0x00000001-> start = 0x40000000-> size = 0x10000000堆管理器初始化
static void mem_malloc_init (ulong dest_addr)
{mem_malloc_start = dest_addr;mem_malloc_end = dest_addr + CFG_MALLOC_LEN;mem_malloc_brk = mem_malloc_start;memset ((void *) mem_malloc_start, 0,mem_malloc_end - mem_malloc_start);
}初始化uboot堆管理器,DDR内存中堆预留896KB
mmc初始化
#if defined(CONFIG_X210)#if defined(CONFIG_GENERIC_MMC)puts ("SD/MMC: ");mmc_exist = mmc_initialize(gd->bd);if (mmc_exist != 0){puts ("0 MB\n");#ifdef CONFIG_CHECK_X210CV3check_flash_flag=0;//check inand error!#endif}#ifdef CONFIG_CHECK_X210CV3else{check_flash_flag=1;//check inand ok! }#endif#endif#if defined(CONFIG_MTD_ONENAND)puts("OneNAND: ");onenand_init();/*setenv("bootcmd", "onenand read c0008000 80000 380000;bootm c0008000");*/#else//puts("OneNAND: (FSR layer enabled)\n");#endif#if defined(CONFIG_CMD_NAND)puts("NAND: ");nand_init();#endif#endif /* CONFIG_X210 */ mmc_initialize是MMC基础初始化(SoC内部的SD/MMC控制器),函数在uboot/drivers/mmc/mmc.c
uboot对硬件操作(网卡、SD卡···)是用linux内核驱动实现的(drivers目录)
mmc_initialize初始化函数实际调用board_mmc_init和cpu_mmc_init初始化
cpu_mmc_init在uboot/cpu/s5pc11x/cpu.c,实际调用drivers/mmc/s3c_mmcxxx.c驱动代码初始化MMC
环境变量重定位
/* initialize environment */env_relocate ();SD卡有独立扇区作为环境变量存储区域,uboot代码中包含默认环境变量,运行时会被读取到DDR环境变量中,在写入SD卡中
IP,MAC地址
/* IP Address */gd->bd->bi_ip_addr = getenv_IPaddr ("ipaddr");/* MAC Address */{int i;ulong reg;char *s, *e;char tmp[64];i = getenv_r ("ethaddr", tmp, sizeof (tmp));s = (i > 0) ? tmp : NULL;for (reg = 0; reg < 6; ++reg) {gd->bd->bi_enetaddr[reg] = s ? simple_strtoul (s, &e, 16) : 0;if (s)s = (*e) ? e + 1 : e;}#ifdef CONFIG_HAS_ETH1i = getenv_r ("eth1addr", tmp, sizeof (tmp));s = (i > 0) ? tmp : NULL;for (reg = 0; reg < 6; ++reg) {gd->bd->bi_enet1addr[reg] = s ? simple_strtoul (s, &e, 16) : 0;if (s)s = (*e) ? e + 1 : e;}#endif}
初始化全局变量中的IP和MAC(gd->bd)
devices_init
int devices_init (void)
{#ifndef CONFIG_ARM /* already relocated for current ARM implementation */ulong relocation_offset = gd->reloc_off;int i;/* relocate device name pointers */for (i = 0; i < (sizeof (stdio_names) / sizeof (char *)); ++i) {stdio_names[i] = (char *) (((ulong) stdio_names[i]) +relocation_offset);}#endif/* Initialize the list */devlist = ListCreate (sizeof (device_t));if (devlist == NULL) {eputs ("Cannot initialize the list of devices!\n");return -1;}#if defined(CONFIG_HARD_I2C) || defined(CONFIG_SOFT_I2C)i2c_init (CFG_I2C_SPEED, CFG_I2C_SLAVE);#endif#ifdef CONFIG_LCDdrv_lcd_init ();#endif#if defined(CONFIG_VIDEO) || defined(CONFIG_CFB_CONSOLE)drv_video_init ();#endif#ifdef CONFIG_KEYBOARDdrv_keyboard_init ();#endif#ifdef CONFIG_LOGBUFFERdrv_logbuff_init ();#endifdrv_system_init ();#ifdef CONFIG_SERIAL_MULTIserial_devices_init ();#endif#ifdef CONFIG_USB_TTYdrv_usbtty_init ();#endif#ifdef CONFIG_NETCONSOLEdrv_nc_init ();#endifreturn (0);
}函数执行所有从linux内核中继承来的那些硬件驱动的初始化函数
跳转表
void jumptable_init (void)
{int i;gd->jt = (void **) malloc (XF_MAX * sizeof (void *));for (i = 0; i < XF_MAX; i++)gd->jt[i] = (void *) dummy;gd->jt[XF_get_version] = (void *) get_version;gd->jt[XF_malloc] = (void *) malloc;gd->jt[XF_free] = (void *) free;gd->jt[XF_getenv] = (void *) getenv;gd->jt[XF_setenv] = (void *) setenv;gd->jt[XF_get_timer] = (void *) get_timer;gd->jt[XF_simple_strtoul] = (void *) simple_strtoul;gd->jt[XF_udelay] = (void *) udelay;gd->jt[XF_simple_strtol] = (void *) simple_strtol;gd->jt[XF_strcmp] = (void *) strcmp;#if defined(CONFIG_I386) || defined(CONFIG_PPC)gd->jt[XF_install_hdlr] = (void *) irq_install_handler;gd->jt[XF_free_hdlr] = (void *) irq_free_handler;#endif /* I386 || PPC */#if defined(CONFIG_CMD_I2C)gd->jt[XF_i2c_write] = (void *) i2c_write;gd->jt[XF_i2c_read] = (void *) i2c_read;#endif
}未使用
控制台二阶段初始化
/* Called after the relocation - use desired console functions */
int console_init_r (void)
{device_t *inputdev = NULL, *outputdev = NULL;int i, items = ListNumItems (devlist);#ifdef CONFIG_SPLASH_SCREEN/* suppress all output if splash screen is enabled and we havea bmp to display */if (getenv("splashimage") != NULL)gd->flags |= GD_FLG_SILENT;#endif/* Scan devices looking for input and output devices */for (i = 1;(i <= items) && ((inputdev == NULL) || (outputdev == NULL));i++) {device_t *dev = ListGetPtrToItem (devlist, i);if ((dev->flags & DEV_FLAGS_INPUT) && (inputdev == NULL)) {inputdev = dev;}if ((dev->flags & DEV_FLAGS_OUTPUT) && (outputdev == NULL)) {outputdev = dev;}}/* Initializes output console first */if (outputdev != NULL) {console_setfile (stdout, outputdev);console_setfile (stderr, outputdev);}/* Initializes input console */if (inputdev != NULL) {console_setfile (stdin, inputdev);}gd->flags |= GD_FLG_DEVINIT; /* device initialization completed */#ifndef CFG_CONSOLE_INFO_QUIET/* Print information */puts ("In: ");if (stdio_devices[stdin] == NULL) {puts ("No input devices available!\n");} else {printf ("%s\n", stdio_devices[stdin]->name);}puts ("Out: ");if (stdio_devices[stdout] == NULL) {puts ("No output devices available!\n");} else {printf ("%s\n", stdio_devices[stdout]->name);}puts ("Err: ");if (stdio_devices[stderr] == NULL) {puts ("No error devices available!\n");} else {printf ("%s\n", stdio_devices[stderr]->name);}#endif /* CFG_CONSOLE_INFO_QUIET */#ifndef CONFIG_X210/* Setting environment variables */for (i = 0; i < 3; i++) {setenv (stdio_names[i], stdio_devices[i]->name);}#endif#if 0/* If nothing usable installed, use only the initial console */if ((stdio_devices[stdin] == NULL) && (stdio_devices[stdout] == NULL))return (0);#endifreturn (0);
}console_init_r初始化数据结构配置值
使能中断
void enable_interrupts (void)
{return;
}
初始化网卡地址
#ifdef CONFIG_DRIVER_CS8900cs8900_get_enetaddr (gd->bd->bi_enetaddr);
#endif初始化网卡地址(gd->bd)loadaddr和bootfile/* Initialize from environment */if ((s = getenv ("loadaddr")) != NULL) {load_addr = simple_strtoul (s, NULL, 16);}
#if defined(CONFIG_CMD_NET)if ((s = getenv ("bootfile")) != NULL) {copy_filename (BootFile, s, sizeof (BootFile));}
初始化环境变量,启动linux内核使用该值
空函数
#ifdef BOARD_LATE_INITboard_late_init ();
#endif
#if defined(CONFIG_CMD_NET)
#if defined(CONFIG_NET_MULTI)puts ("Net: ");
#endifeth_initialize(gd->bd);
#if defined(CONFIG_RESET_PHY_R)debug ("Reset Ethernet PHY\n");reset_phy();
#endif
#endif#if defined(CONFIG_CMD_IDE)puts("IDE: ");ide_init();
#endif
board_late_init,eth_initialize空函数
LCD初始化和logo显示
#ifdef CONFIG_MPADextern int x210_preboot_init(void);x210_preboot_init();
#endifextern void mpadfb_init(void);
int x210_preboot_init(void)
{mpadfb_init();return 1;
}void mpadfb_init()
{// unsigned short int *pFB;//杩欓噷涓€瀹氳鐢╯hort绫诲瀷!// int i;fb_init();//lqm masked for testlcd_port_init();lcd_reg_init();#ifdef CONFIG_CHECK_X210CV3init_logo();#endifdisplay_logo(&s5pv210_fb);#if(DISP_MODE == TRULY043)backlight_brigness_init(0);#else//AT070TN92backlight_brigness_init(1);#endif// pFB = (unsigned short int *)CFG_LCD_FBUFFER;/*for(i=0; i<800*480; i++)*pFB++ = 0xf800;*//* for(i=0; i<800*100; i++)*pFB++ = 0xf800;for(i=800*100; i<800*200; i++)*pFB++ = 0x07e0;for(i=800*200; i<800*480; i++)*pFB++ = 0x001f;*/#if(DISP_MODE == TRULY043)writel((readl(GPF3DAT) & ~(0x1<<5)) | (0x1<<5), GPF3DAT);#endif
}
快速烧录(镜像升级)
/* check menukey to update from sd */extern void update_all(void);if(check_menu_update_from_sd()==0)//update mode{puts ("[LEFT DOWN] update mode\n");run_command("fdisk -c 0",0);update_all();}elseputs ("[LEFT UP] boot mode\n");镜像烧录到SD卡,开机按键LEFT键烧录到iNand中
死循环
for (;;) {main_loop ();}/* NOTREACHED - no way out of command loop except booting */
开机延时,命令解析执行
demo:
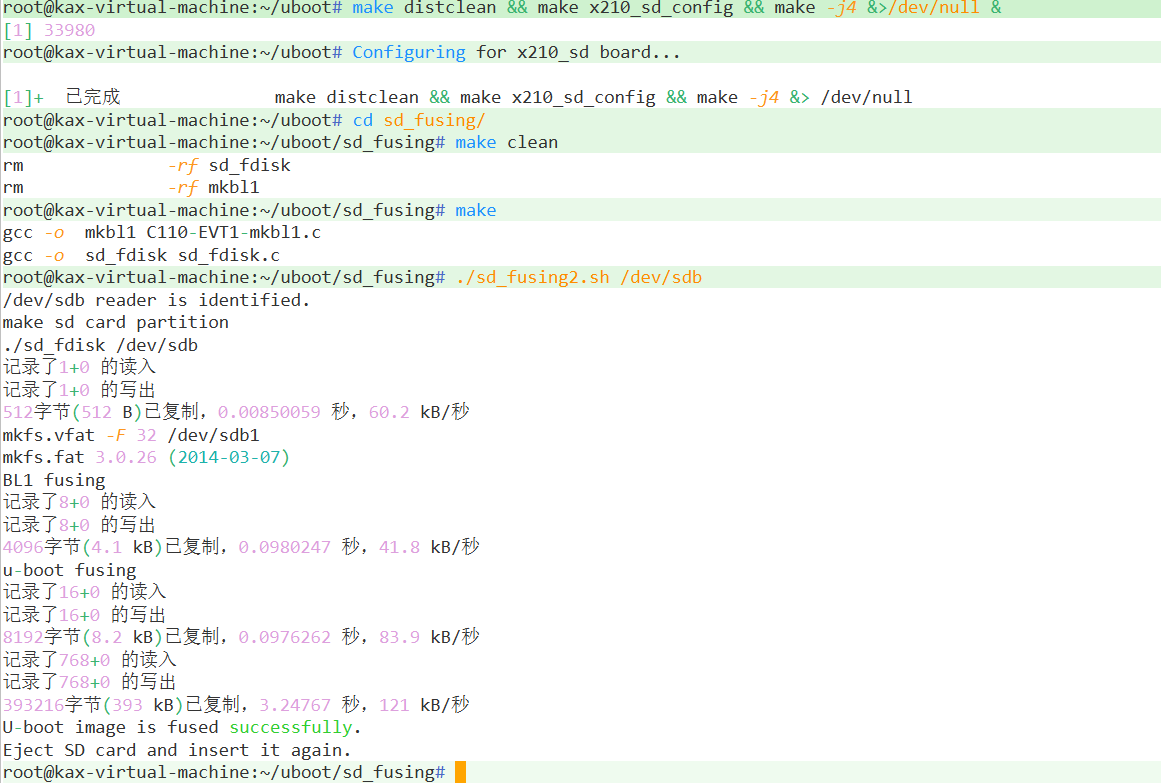
烧录修改并编译的uboot
make distclean && make x210_sd_config && makecd sd_fusing/make clean./sd_fusing.sh /dev/sdb结果示例:
相关文章:
U-boot(四):start_armboot
本文主要探讨210的uboot启动的第二阶段,主要函数为start_armboot。 uboot 一阶段初始化SoC内部部件(看门狗、时钟等),初始化DDR,重定位 二阶段初始化其余硬件(iNand、网卡芯片)以及命令、环境变量等 启动打印硬件信息,进入bootdelay,读秒完后执行bootc…...

.Net面试题4
1.请解释一下泛型(Generics)在C#中的作用。 泛型是一种将数据类型参数化的机制,使得代码可以在编译时具有更强的类型安全性和灵活性。C#中的泛型可以用于类、接口、方法等的定义和实例化。泛型允许在编写代码时使用具有不同实参的类型&#x…...

python 列表插入数据的 四种方法 append insert extend 切片赋值
append insert 插入单个数据 append 加到末尾,insert 加到指定位置 extend、切片方式插入多个数据 extend 加到末尾,切片加到指定位置 my_list [1, 2, 3] my_list.append(4) print(my_list) # 输出: [1, 2, 3, 4]my_list [1, 2, 3] my_list.insert(…...

C++中std::string的=,+,+=使用过程中的问题
1. 调用构造函数时的运算符不支持int,char类型的操作数 string str1 a; //error 这是一个构造函数。C中string是一个类,内部封装了char *来管理这个字符串。 string的构造函数: string() // 创建一个空的字符串string(const char * s)…...

ruoyi-plus使用Statistic统计组件升级element-plus
原本使用的就是gitee上lionli的ruoyi-plus版本的代码。但是在使用过程中作首页数据看板时想使用elementui的Statistic统计组件。结果在浏览器控制台报错找不到组件el-statistic 于是查看elementui的历史版本,发现是在新版中才有这个组件,旧版本是没这个组…...
)
Python基础入门例程72-NP72 生成字典(字典)
最近的博文: Python基础入门例程71-NP71 喜欢的颜色(字典)-CSDN博客 Python基础入门例程70-NP70 首都(字典)-CSDN博客 Python基础入门例程69-NP69 姓名与学号(字典)-CSDN博客 目录 最近的博文: 描述...

flink的java.lang.IllegalStateException: Buffer pool is destroyed 异常
背景 最近flink的在线应用出现错误java.lang.IllegalStateException: Buffer pool is destroyed,本文记录下这个错误的原因 错误原因 详细的日志堆栈如下: Caused by: java.lang.IllegalStateException: Buffer pool is destroyed. at org.apache.flink.runtime…...

物联网AI MicroPython学习之语法 实时时钟RTC
学物联网,来万物简单IoT物联网!! RTC 介绍 模块功能: 实时时钟RTC驱动模块 接口说明 RTC - 构建RTC对象 函数原型:RTC()参数说明: 无 返回值: 构建的RTC对象。 datetime - RTC时钟操作 函数原型&a…...
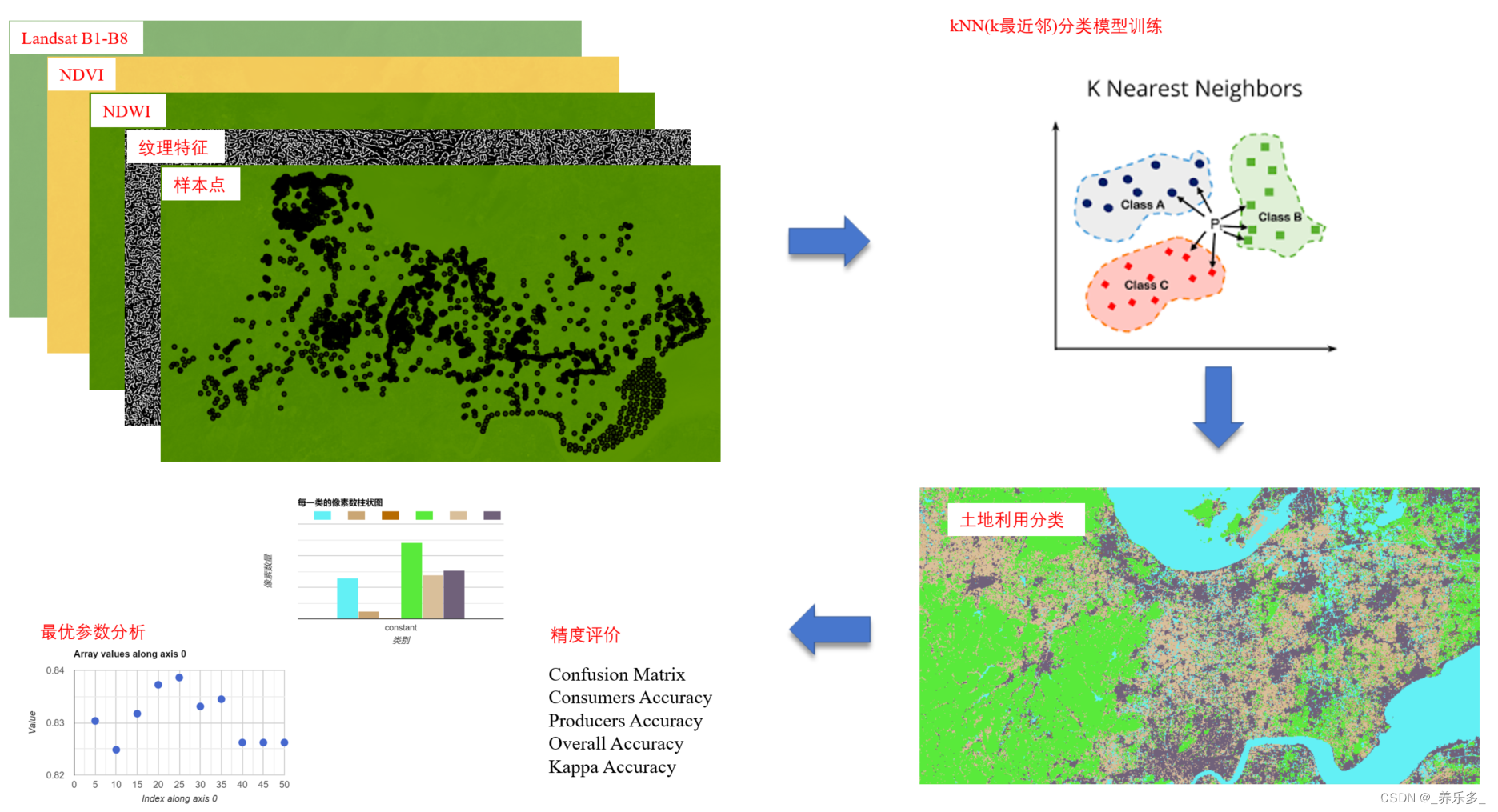
GEE:kNN(k-最近邻)分类教程(样本制作、特征添加、训练、精度、最优参数、统计面积)
作者:CSDN @ _养乐多_ 本文将介绍在Google Earth Engine (GEE)平台上进行kNN(k-最近邻)分类的方法和代码,其中包括制作样本点教程(本地、在线和本地在线混合制作样本点,合并样本点等),加入特征变量(各种指数、纹理特征、时间序列特征、物候特征等),运行kNN(k-最近…...
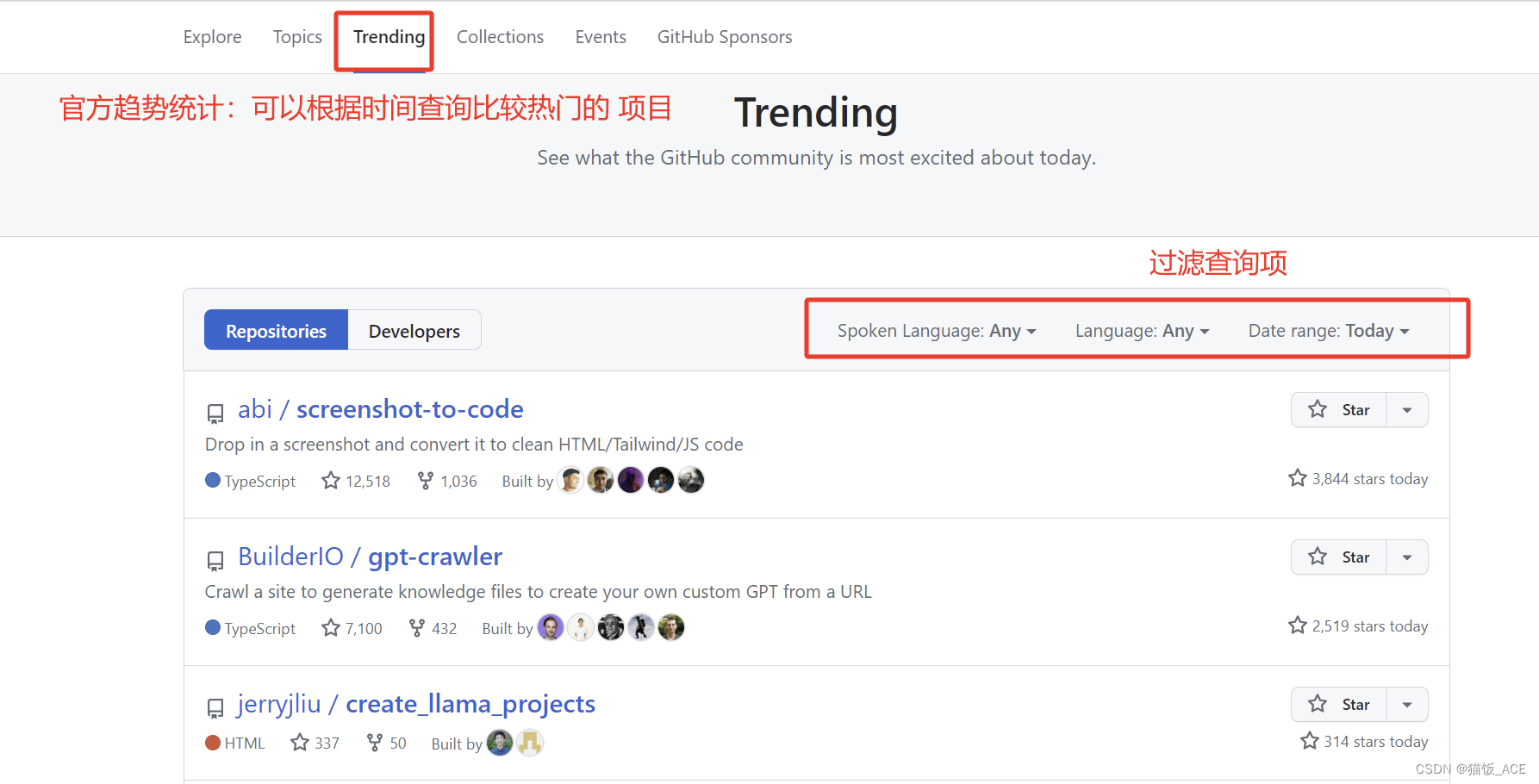
【GitHub】保姆级使用教程
一、如何流畅访问GitHub 1、网易uu加速器 输入网址,无脑下载网易加速器;https://uu.163.com/ 下载安装完毕后,创建账号进行登录 登录后,在右上角搜索框中搜索“学术资源”,并点击; 稍等一会儿就会跳…...

Kotlin基础——Lambda和函数式编程
Lambda 使用 { } 定义Lamba,调用run运行 run { println(1) }更常用的为 { 参数 -> 操作 },还可以存储到变量中,把变量作为普通函数对待 val sum { x: Int, y: Int -> x y } println(sum(1, 2))maxBy()接收一个Lambda,传…...
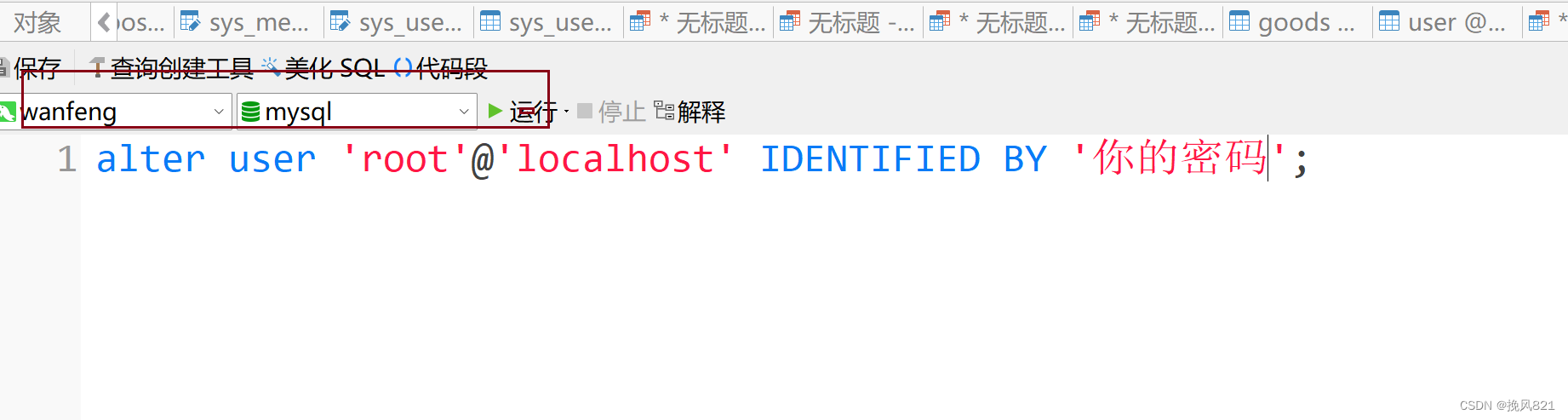
mysql忘记密码,然后重置
数据库版本8.0.26 只针对以下情况 mysql忘记了密码,但是你navicat之前连接上了 解决方法: 第一步,选中mysql这个数据库,点击新建查询 第二步:重置密码 alter user rootlocalhost IDENTIFIED BY 你的密码; 然后就可…...

linux centos系统命令安装
Zip unzip 命令安装下载 centos 命令常用常用下载 https://rpmfind.net/linux/rpm2html/search.php?queryzip%28x86-64%29&submitSearch…&system&arch 在线安装zip命令 Centos用yum安装的话用下面的命令安装 yum install -y unzip zipUbuntu的的系统可以用下…...

基于springboot实现高校食堂移动预约点餐系统【项目源码】计算机毕业设计
基于springboot实现高校食堂移动预约点餐系统演示 Java语言简介 Java是由SUN公司推出,该公司于2010年被oracle公司收购。Java本是印度尼西亚的一个叫做爪洼岛的英文名称,也因此得来java是一杯正冒着热气咖啡的标识。Java语言在移动互联网的大背景下具备…...
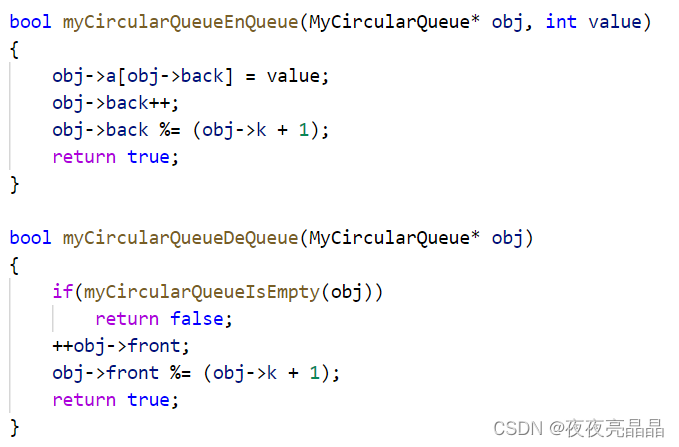
栈和队列OJ题目——C语言
目录 LeetCode 20、有效的括号 题目描述: 思路解析: 解题代码: 通过代码: LeetCode 225、用队列实现栈 题目描述: 思路解析: 解题代码: 通过代码: LeetCode 232、用栈…...

System-V共享内存和基于管道通信实现的进程池
文章目录 一.进程间通信:进程间通信的本质: 二.Linux管道通信匿名管道:关于管道通信的要点:基于匿名管道构建进程池: 三.System-V共享内存共享内存和命名管道协同通信 参考Linux内核源码版本------linux-2.4.3 一.进程间通信: 操作系统中,为了保证安全性,进程之间具有严格的独…...

Python武器库开发-前端篇之CSS基本语法(三十)
前端篇之CSS基本语法(三十) CSS简介 CSS(层叠样式表)是一种用于描述网页外观和布局的样式表语言。它与 HTML 一起,帮助开发者对网页进行美化和布局。CSS通过定义网页元素的颜色、字体、大小、背景、边框等属性,使网页变得更加美…...
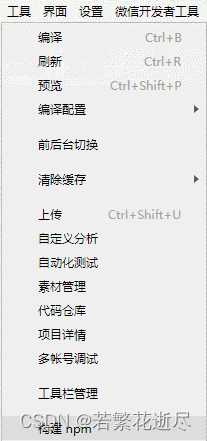
微信小程序实现类似Vue中的computed、watch功能
微信小程序实现类似Vue中的computed、watch功能 构建npm使用 构建npm 创建包管理器 进入小程序后,打开终端,点击顶部“视图” - “终端” 新建终端 使用 npm init -y初始化包管理器,生成一个package.json文件 安装 npm 包 npm install --…...

[JVM] 美团二面,说一下JVM数据区域
Java 虚拟机在执行 Java 程序的过程中会把它管理的内存划分成若干个不同的数据区域。这些区域有不同的用途。 文章目录 线程私有的数据区域1. 程序计数器2. Java 虚拟机栈3. 本地方法栈 线程共享的数据区域1. Java 堆2. 方法区3. 运行时常量池4. 直接内存 线程私有的数据区域 …...

mgmtapi.dll文件丢失找不到怎么办?免费下载方法分享
在使用电脑系统时经常会出现丢失找不到某些文件的情况,由于很多常用软件都是采用 Microsoft Visual Studio 编写的,所以这类软件的运行需要依赖微软Visual C运行库,比如像 QQ、迅雷、Adobe 软件等等,如果没有安装VC运行库或者安装…...

从命令行到IDE:OMNeT++ 4.6安装后,如何高效创建你的第一个网络仿真项目?
从命令行到IDE:OMNeT 4.6安装后高效创建首个网络仿真项目指南 当你第一次打开OMNeT IDE时,那种既兴奋又茫然的感觉我至今记忆犹新——满屏的菜单选项、陌生的术语、复杂的项目结构,让人不知从何下手。本文将带你跨越这个"新手墙"&a…...

情感分析准确率骤降19%?——R 4.5中sentimentr 2.4.1与dplyr 1.1.0冲突根源及热补丁部署方案
第一章:情感分析准确率骤降19%的现场复现与影响评估在某次例行模型灰度发布后,线上情感分析服务的准确率监控指标在15分钟内从86.3%断崖式下跌至67.4%,降幅达19.1%。该异常立即触发SLO熔断告警,下游12个业务方反馈推荐文案情绪倾向…...

不止于聊天:用Ollama API和Python打造你的第一个AI小工具
不止于聊天:用Ollama API和Python打造你的第一个AI小工具 当大多数人还在用大语言模型进行简单对话时,聪明的开发者已经将这些能力转化为生产力工具。想象一下:每天重复的代码注释工作可以自动完成,海量技术文档能即时问答&#x…...

如何通过magic.css模块化导入实现动画类按需加载,显著减少项目体积
如何通过magic.css模块化导入实现动画类按需加载,显著减少项目体积 【免费下载链接】magic CSS3 Animations with special effects 项目地址: https://gitcode.com/gh_mirrors/ma/magic magic.css是一款强大的CSS3动画库,提供了丰富的特殊效果动画…...

SCons完整指南:从简单程序到复杂项目的构建自动化
SCons完整指南:从简单程序到复杂项目的构建自动化 【免费下载链接】scons SCons - a software construction tool 项目地址: https://gitcode.com/gh_mirrors/sc/scons SCons是一款功能强大的软件构建工具,它能够帮助开发者自动化从简单程序到复杂…...

目前已经基本能给AI下达命令,并且接收命令返回内容了
所以,接下来只需要等他的人机验证自己跳出来,然后我录个视频,然后破解他,这个事情就算大功告成了,功能类似于openclaw,但是不用付钱,免费token。如果谁愿意给我钱,我就用付费的&…...

51单片机按键控制LED的两种C语言写法对比:数组映射 vs Switch语句,哪种更适合你?
51单片机按键控制LED的两种编程范式深度解析:数组映射与Switch语句实战对比 在嵌入式开发中,按键控制LED是最基础却最能体现编程思想的实验。当我们需要实现按键顺序控制8个LED时,数组映射和switch语句是两种典型解决方案。这两种方法看似都能…...

终极Python GUI开发指南:如何用可视化工具10倍提升Tkinter开发效率
终极Python GUI开发指南:如何用可视化工具10倍提升Tkinter开发效率 【免费下载链接】tkinter-helper 为tkinter打造的可视化拖拽布局界面设计小工具 项目地址: https://gitcode.com/gh_mirrors/tk/tkinter-helper 还在为Python界面开发而烦恼吗?&…...

Liunx创建挂载步骤
1. 查看磁盘情况lsblk # 查看所有块设备 fdisk -l # 查看磁盘分区详情(需 root)2. 分区(以 /dev/sdb 为例)fdisk /dev/sdb进入交互界面后:n → 新建分区p → 主分区(或 e 扩展分区)回车接受默认…...