STM32F103C8T6第5天:独立看门狗、窗口看门狗、dma实验
1. 独立看门狗IWDG介绍(341.45)
什么是看门狗?

- 在由单片机构成的微型计算机系统中,由于单片机的工作常常会受到来自外界电磁场的干扰,造成程序的跑飞,而陷入死循环,程序的正常运行被打断,由单片机控制的系统无法继续工作,会造成整个系统的陷入停滞状态,发生不可预料的后果,所以出于对单片机运行状态进行实时监测的考虑,便产生了一种专门用于监测单片机程序运行状态的模块或者芯片,俗称“看门狗”(watchdog)。
- 独立看门狗工作在主程序之外,能够完全独立工作,它的时钟是专用的低速时钟(LSI),由 VDD 电压供电, 在停止模式和待机模式下仍能工作。
独立看门狗本质
- 本质是一个 12 位的递减计数器,当计数器的值从某个值一直减到 0 的时候,系统就会产生一个复位信号,即 IWDG_RESET 。
- 如果在计数没减到 0 之前,刷新了计数器的值的话,那么就不会产生复位信号,这个动作就是我们经常说的喂狗。
独立看门狗框图
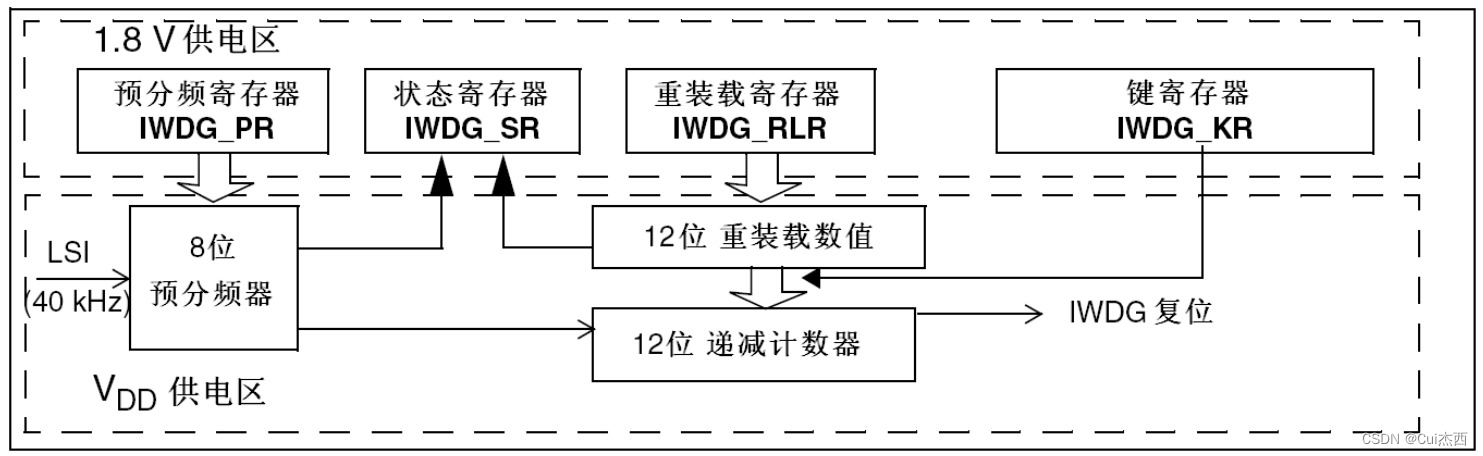
独立看门狗时钟
- 独立看门狗的时钟由独立的 RC 振荡器 LSI 提供,即使主时钟发生故障它仍然有效,非常独立。启用 IWDG 后,LSI 时钟会自动开启(不能主动停止,除非重置/重启)。LSI 时钟频率并不精确,F1 用 40kHz。
- LSI 经过一个 8 位的预分频器得到计数器时钟。
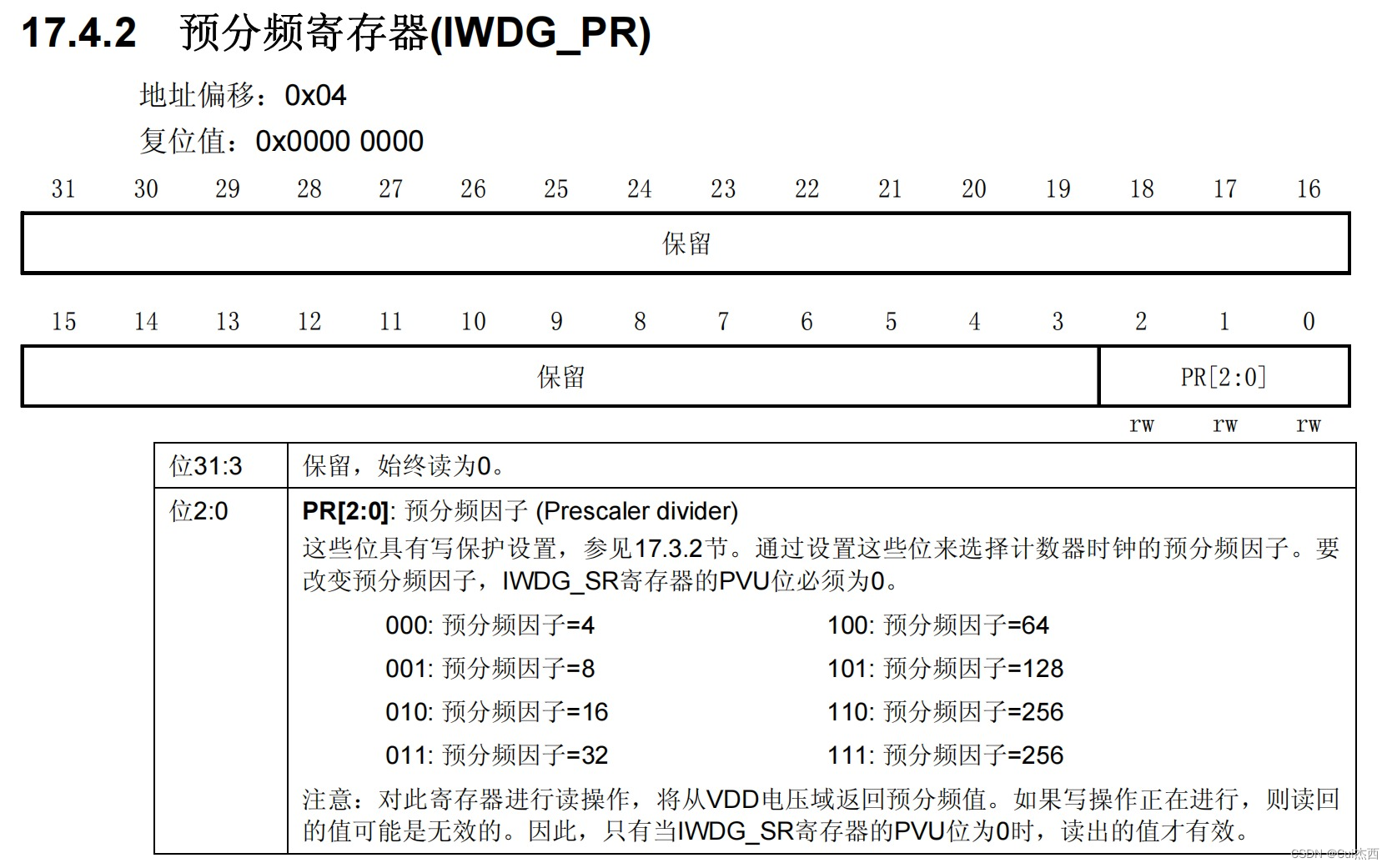
- 分频系数算法:(prer:0–8 是IWDG_PR 的值)

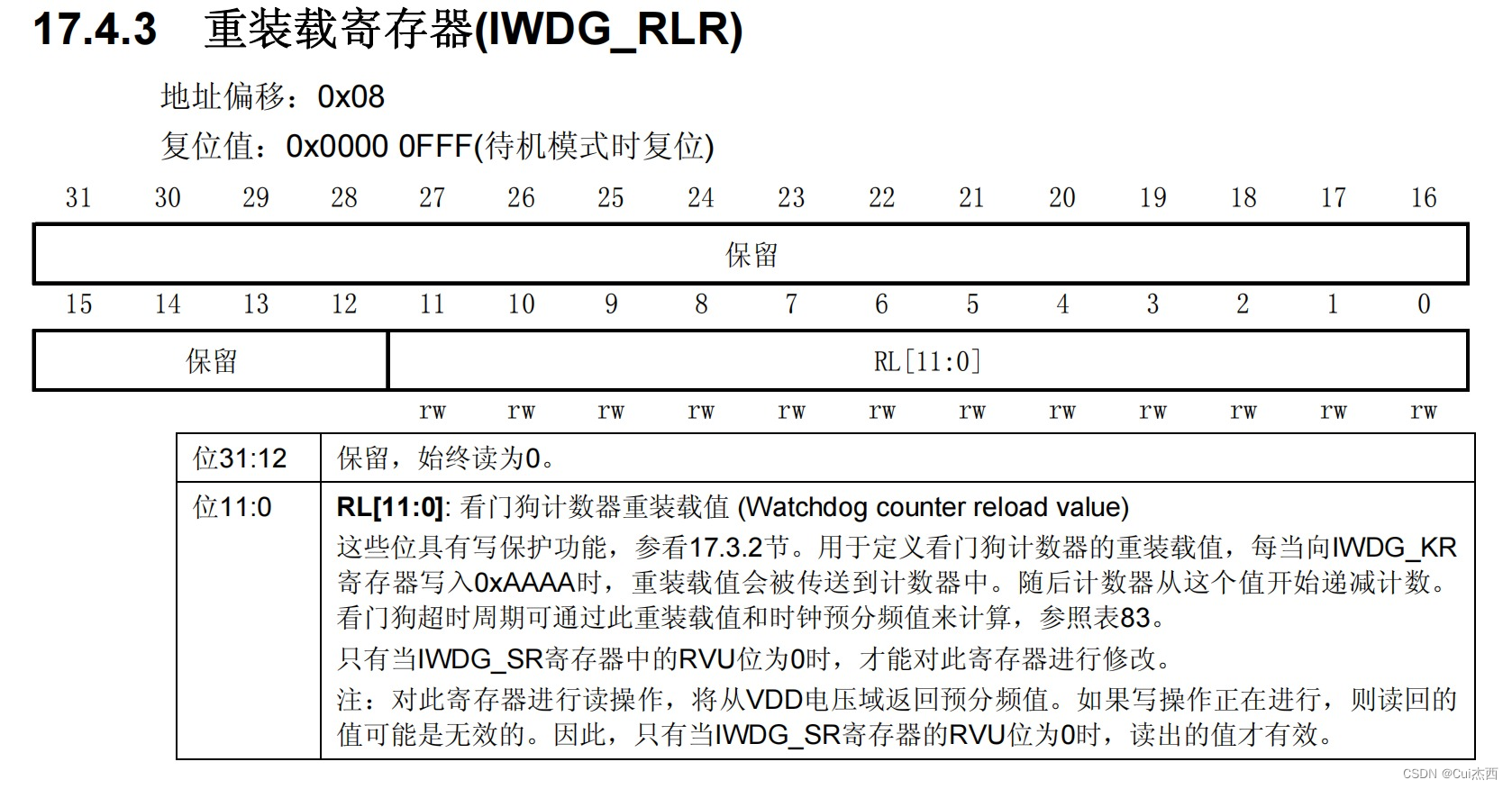
重装载寄存器
- 重装载寄存器是一个 32 位的寄存器,用于存放重装载值,低 12 位有效,即最大值为 4096,这个值的大小决定着独立看门狗的溢出时间。
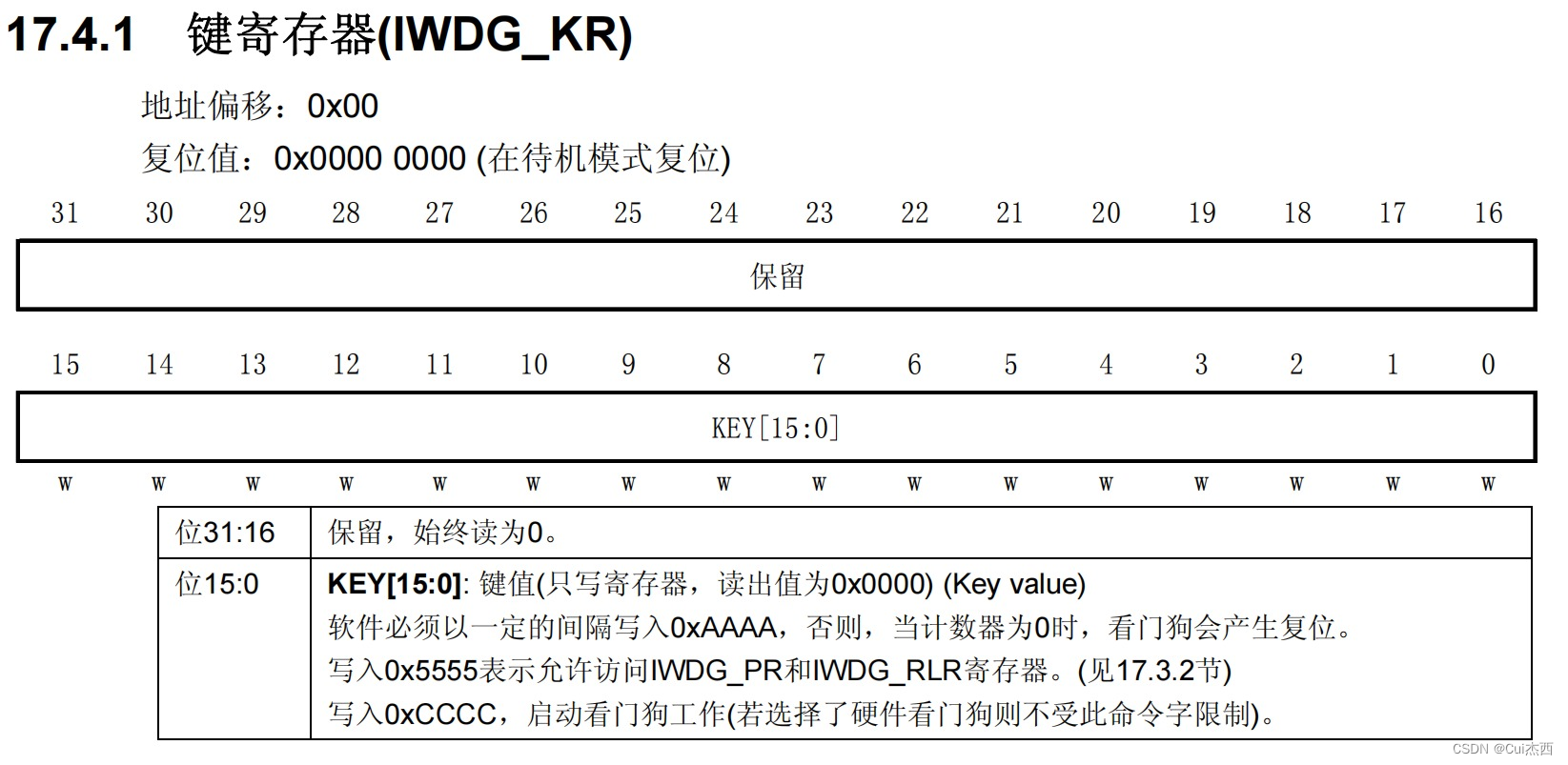
键寄存器
- 键寄存器IWDG_KR可以说是独立看门狗的一个控制寄存器,主要有三种控制方式,往这个寄存器写入下面三个不同的值有不同的效果。
溢出时间计算公式(RLR:计数多少次)
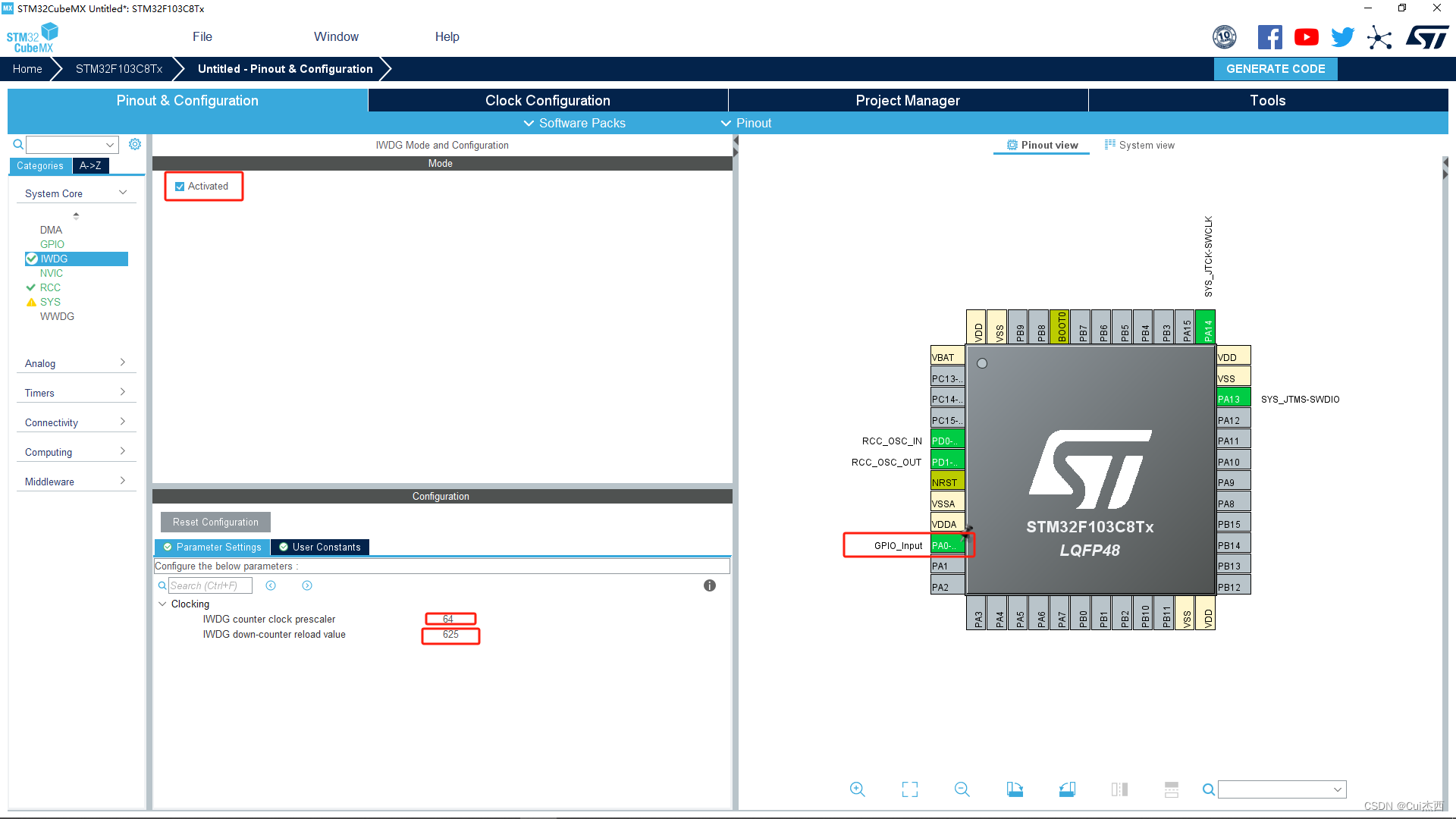
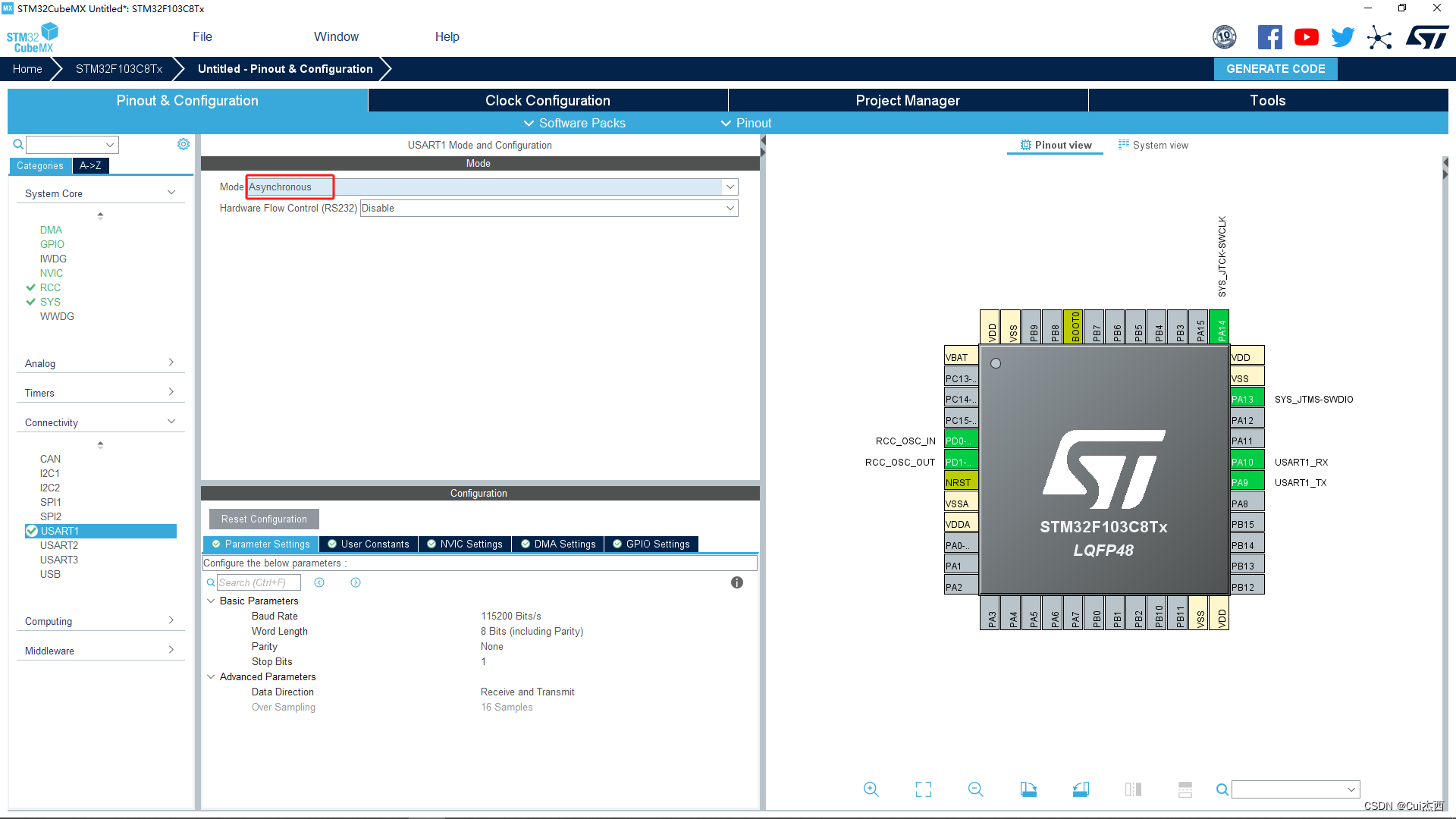
2. 独立看门狗实验(342.46)
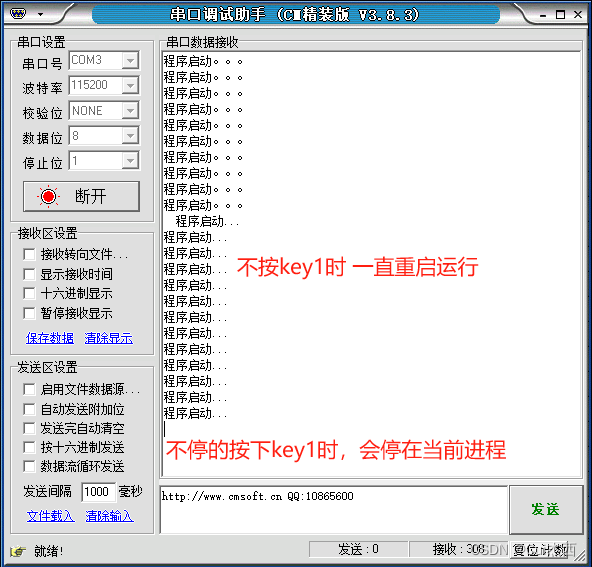
- 需求: 开启独立看门狗,溢出时间为 1 秒,使用按键1进行喂狗。
- 硬件接线:
- KEY1 – PA0
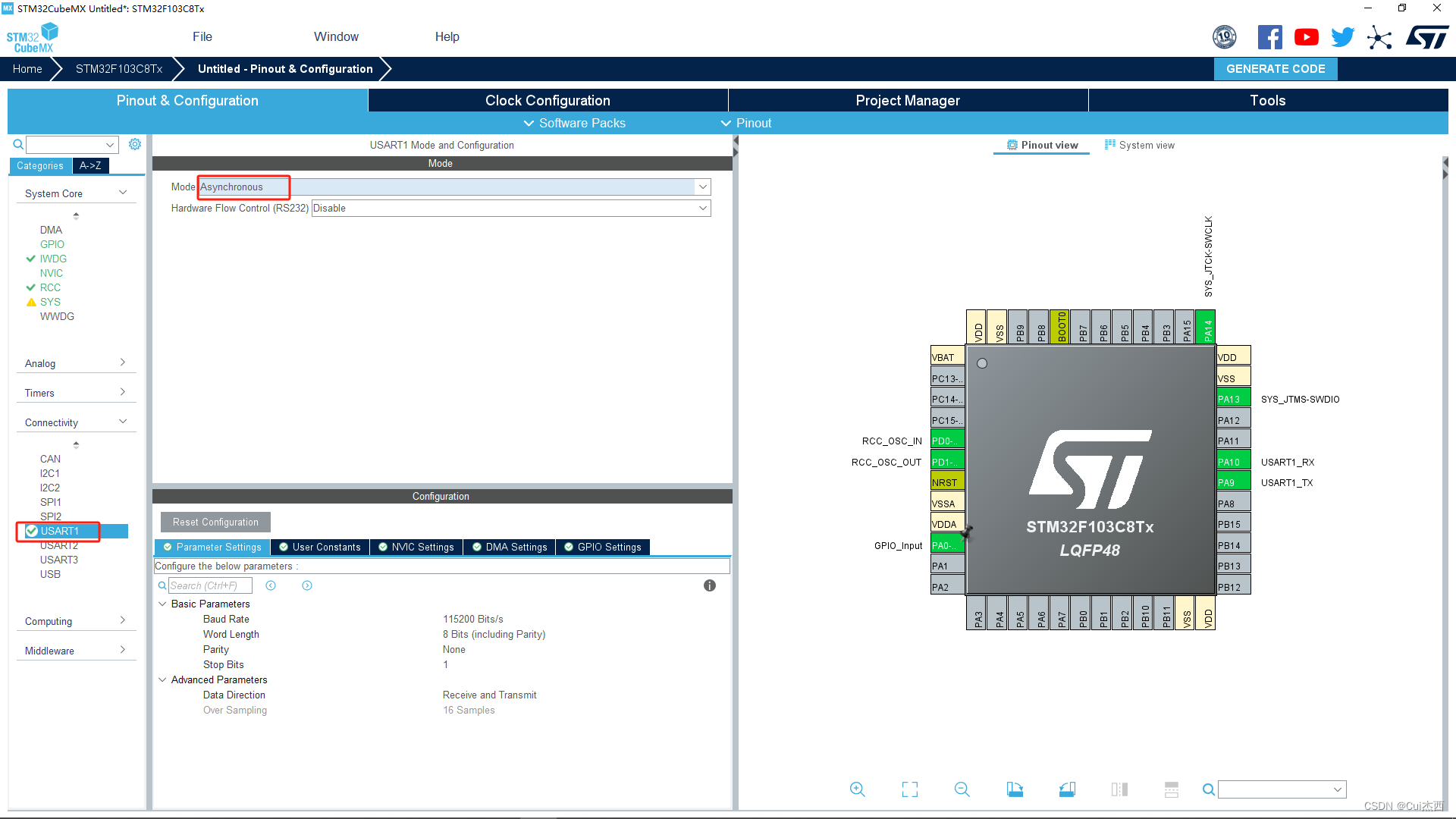
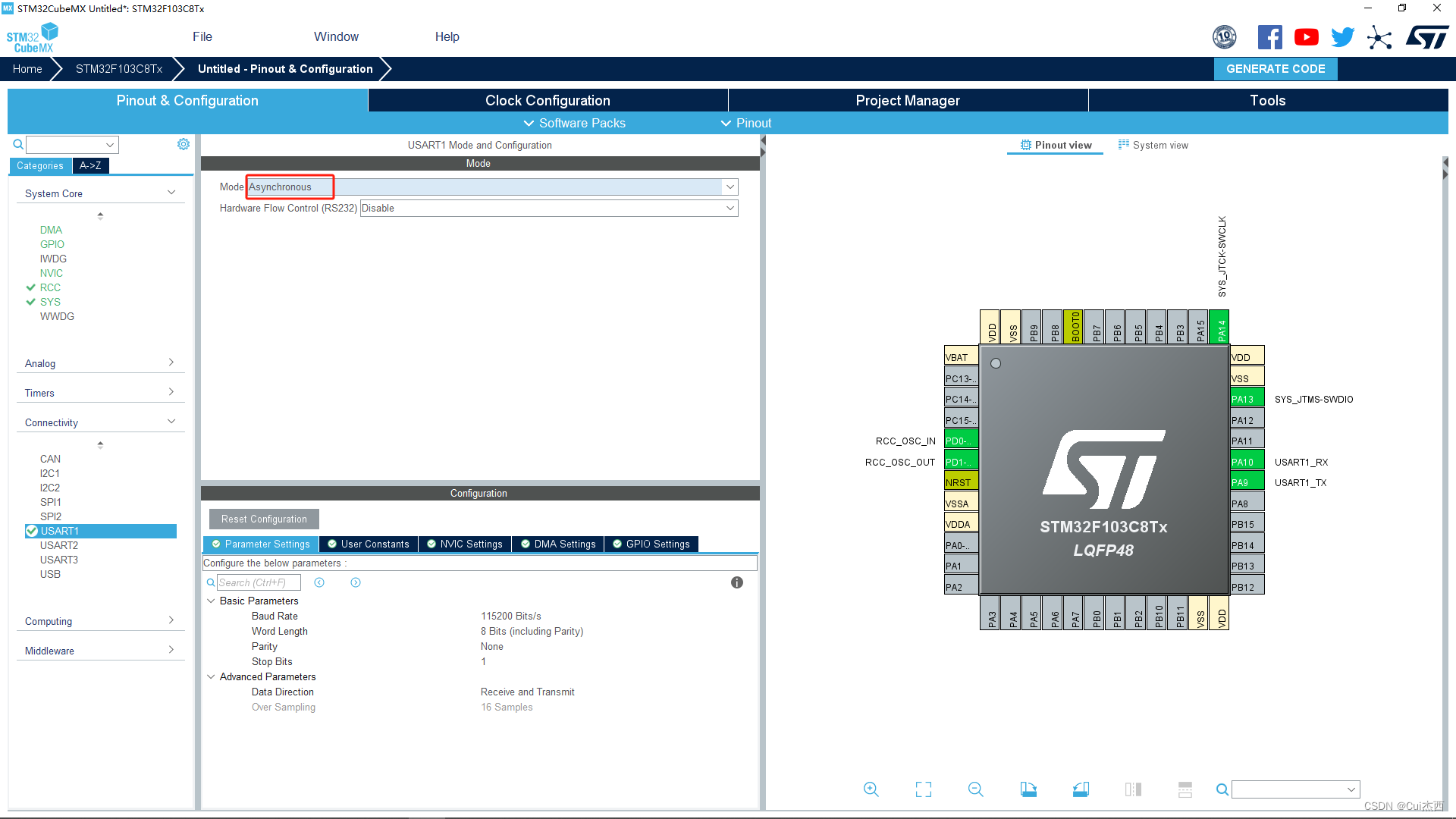
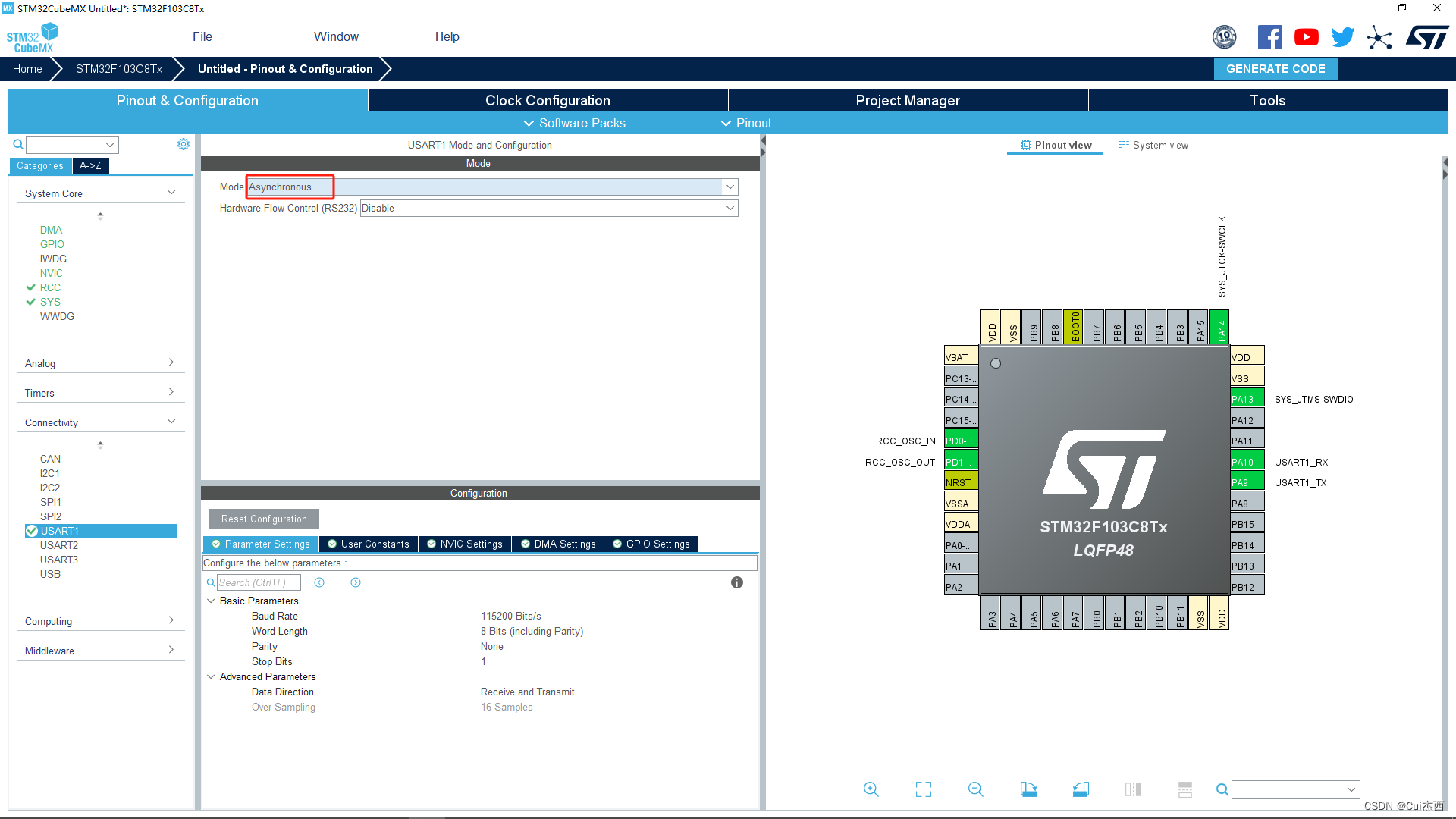
- UART1 – PA9/PA10
- 溢出时间计算(1000ms): PSC=64,RLR=625,f=40
- 编程实现:
- 代码(18.iwdg_test/MDK-ARM)
#include <string.h>
int main()
{HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_IWDG_Init();MX_USART1_UART_Init();HAL_UART_Transmit(&huart1, "程序启动...\n", strlen("程序启动...\n"), 100);while (1){if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)//检测到key1被按下时(低电平)HAL_IWDG_Refresh(&hiwdg);HAL_Delay(50);}
}
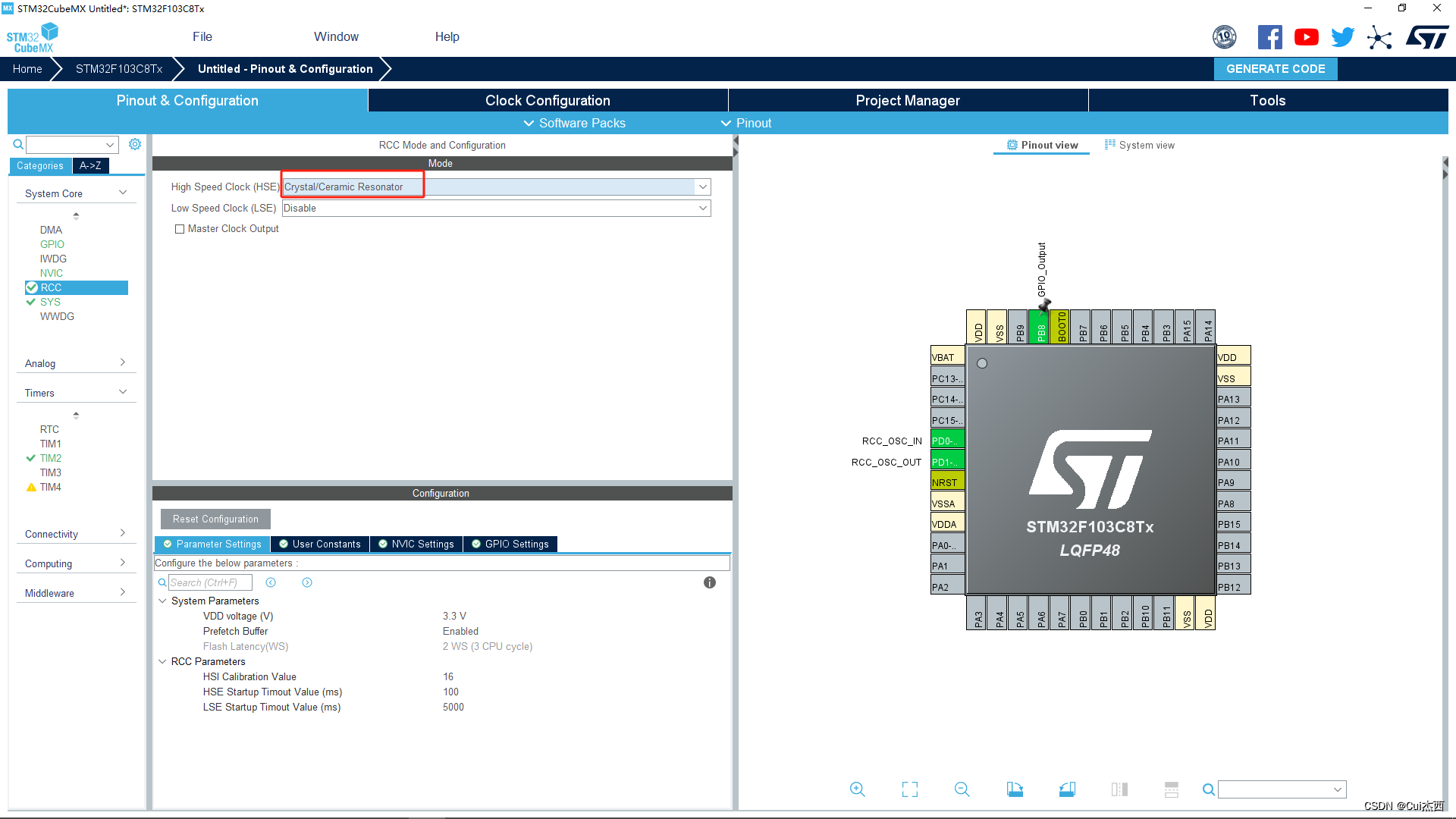
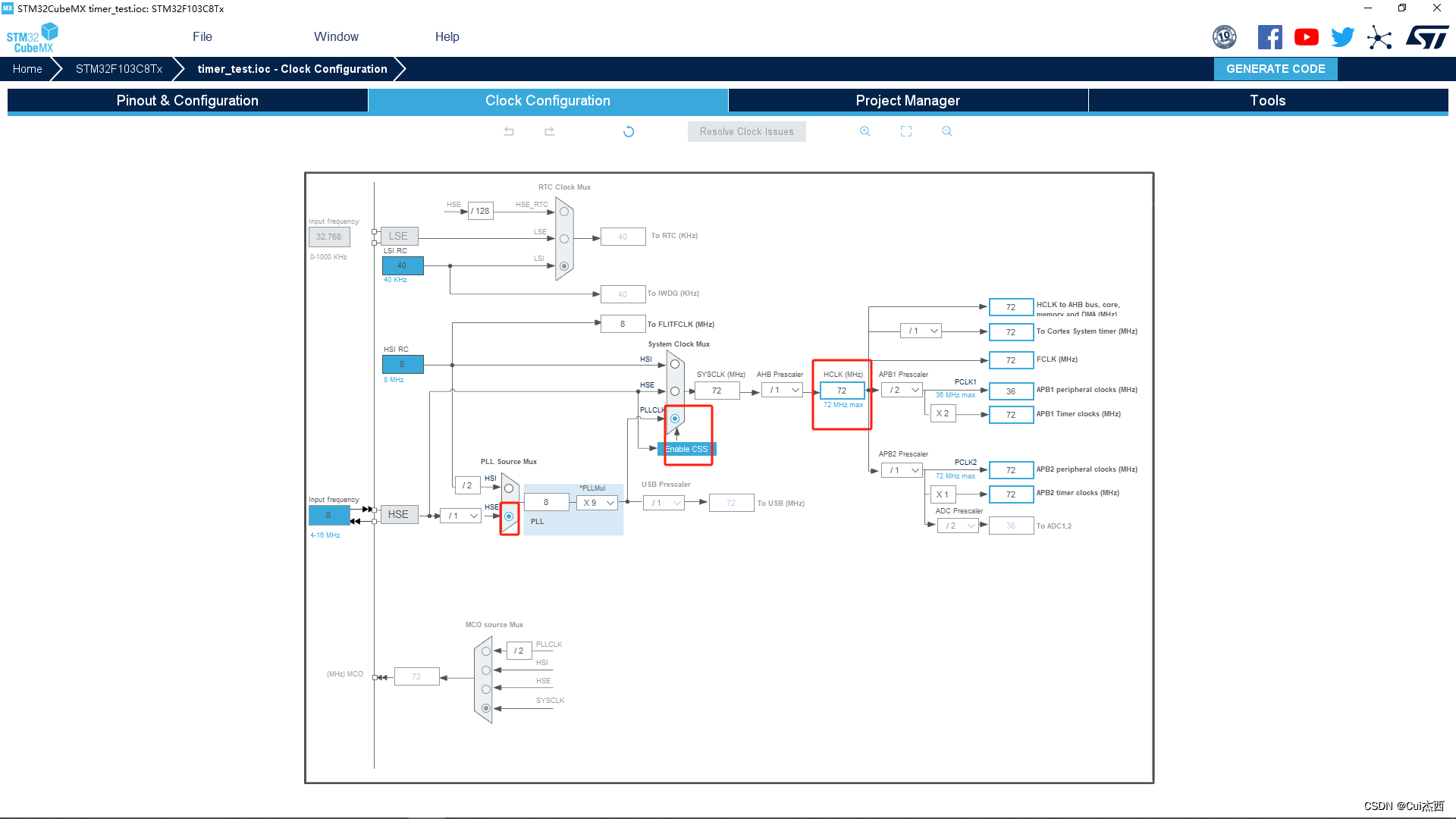
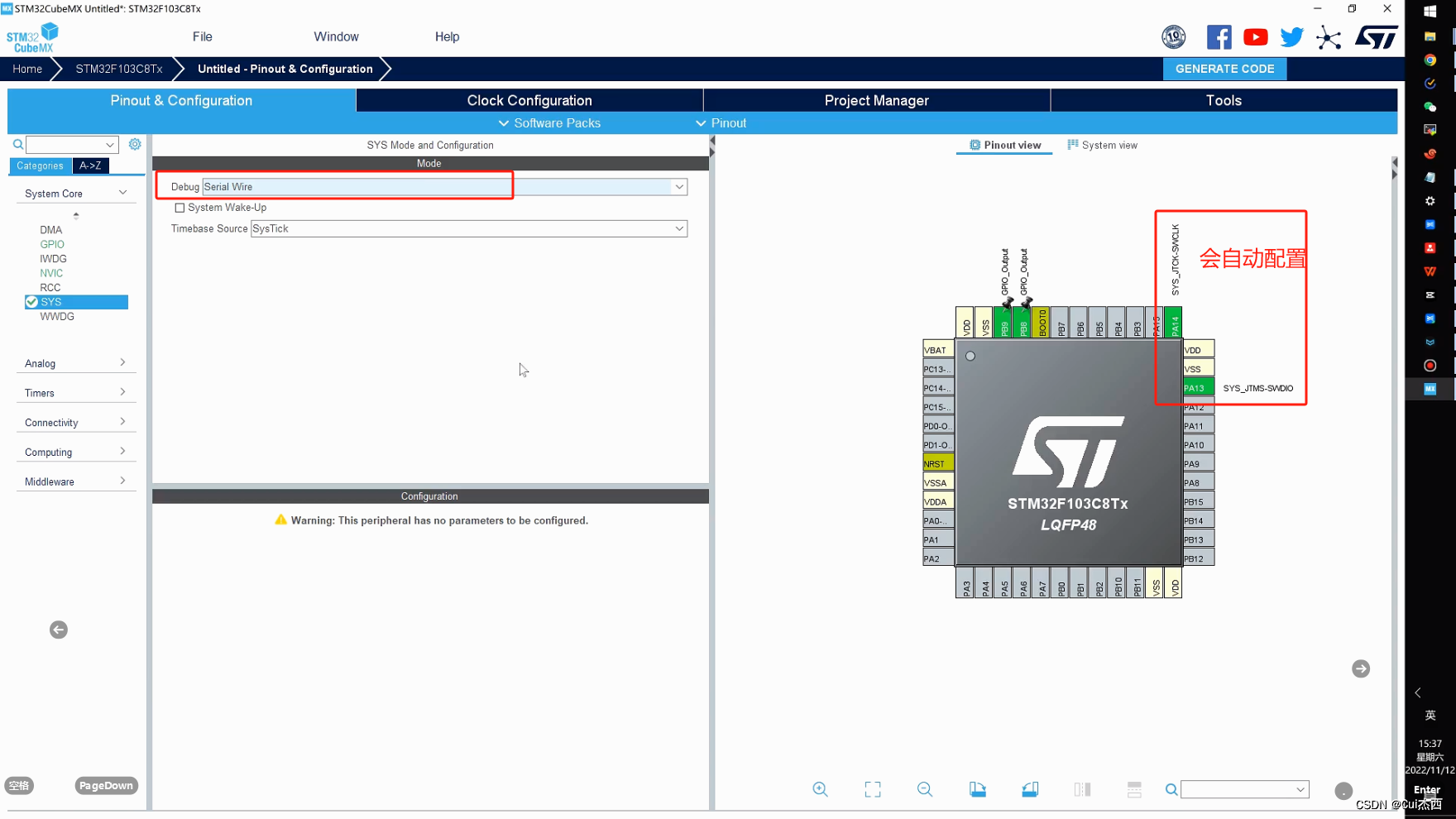
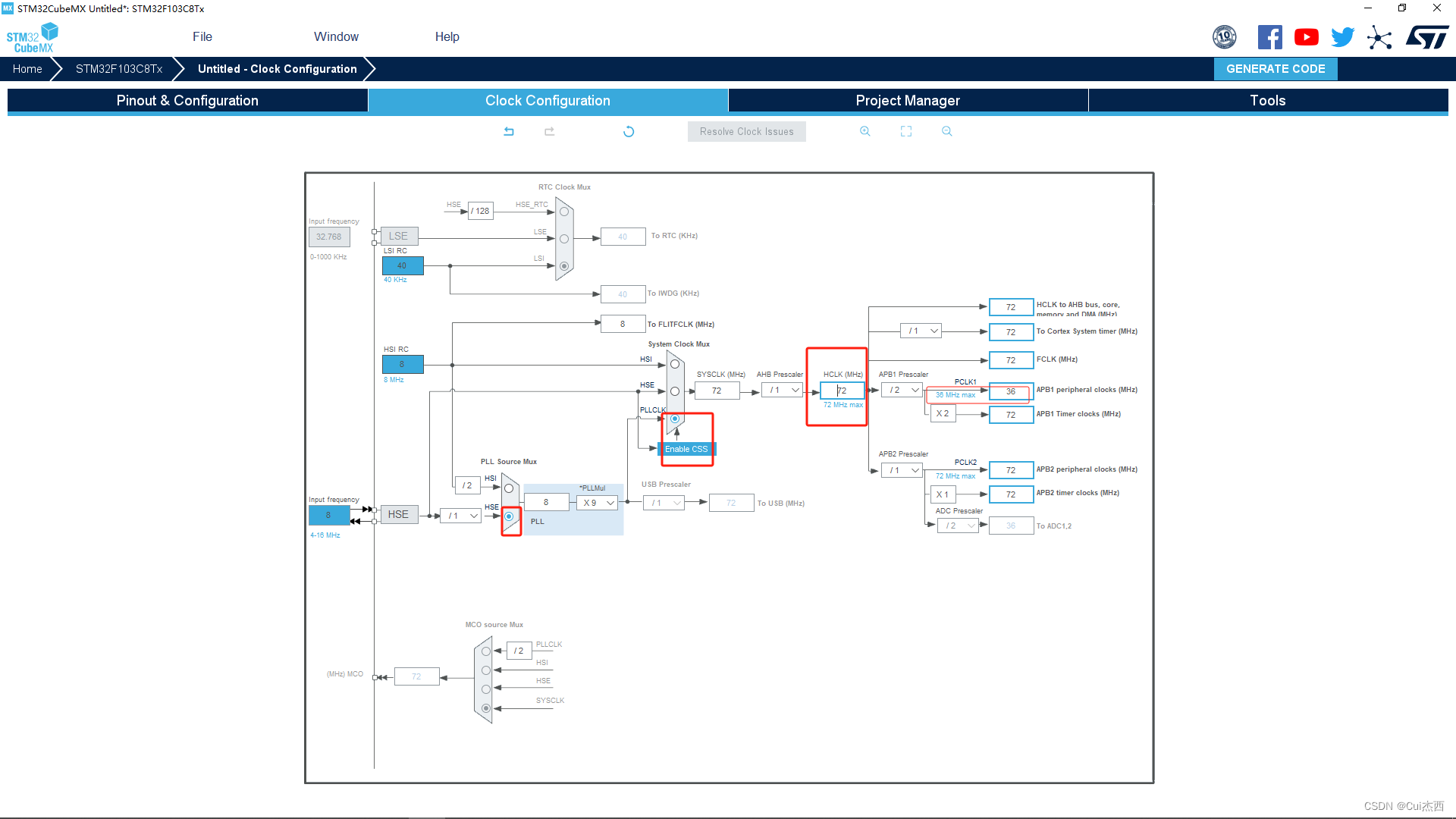
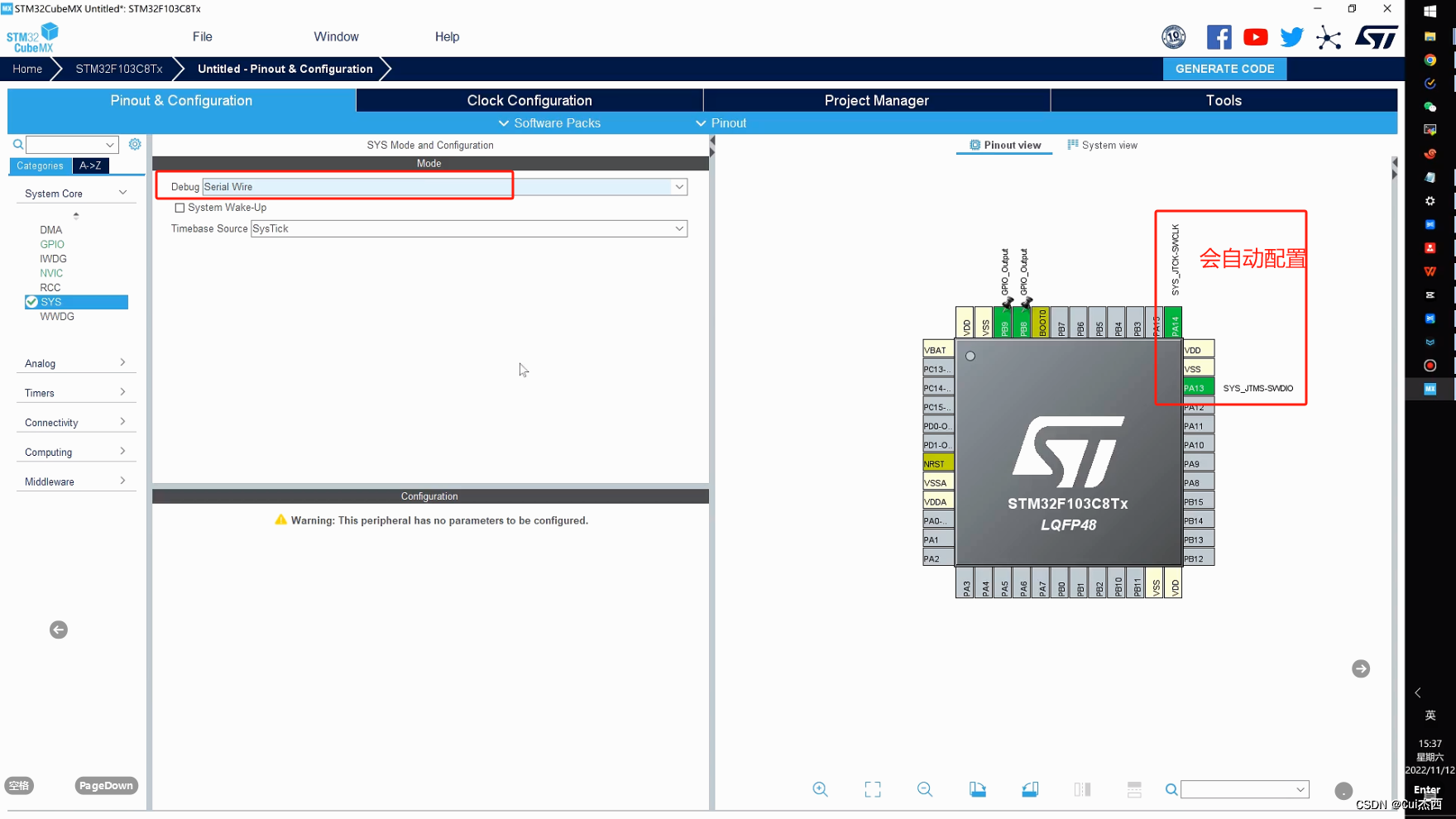
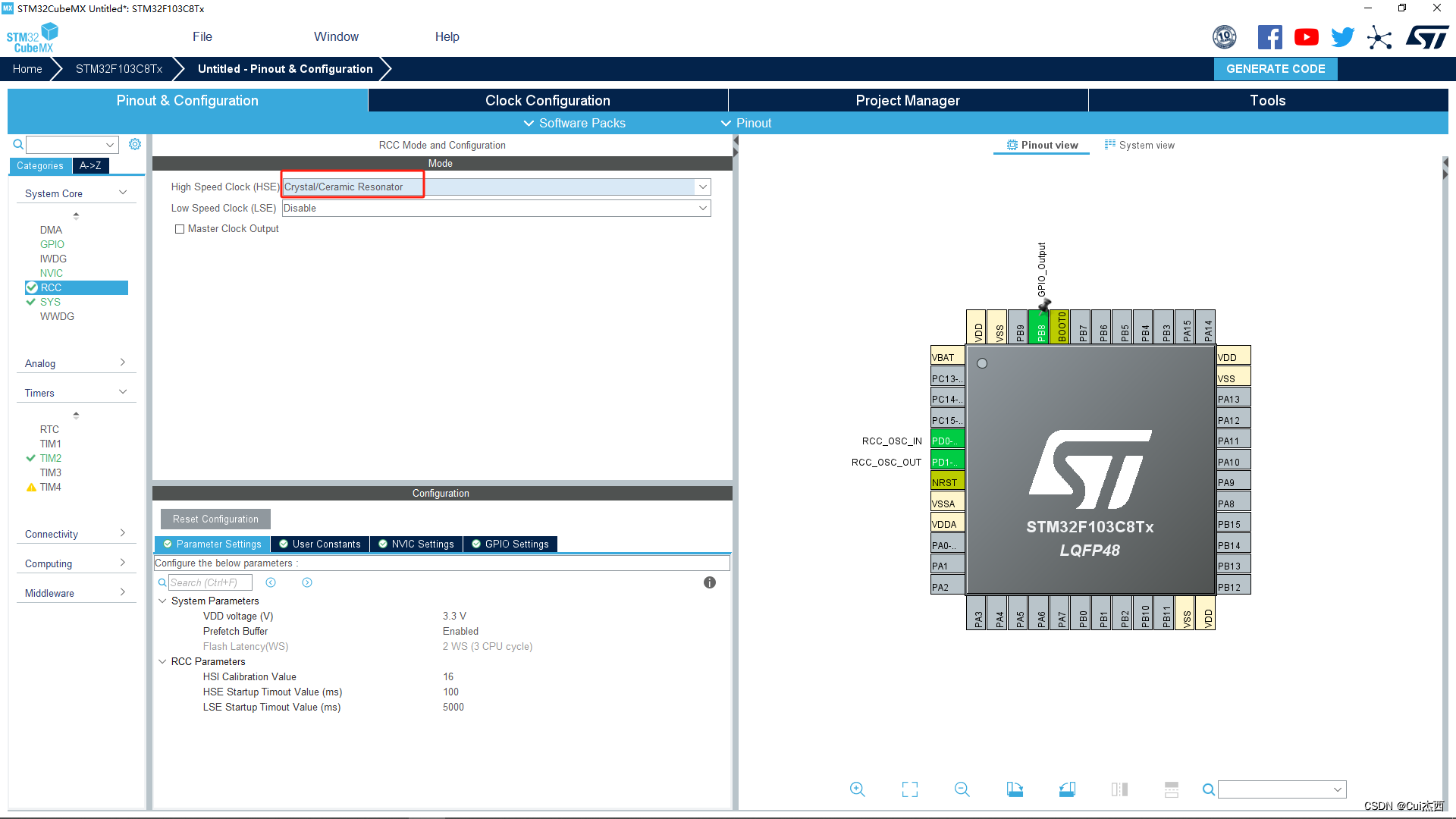
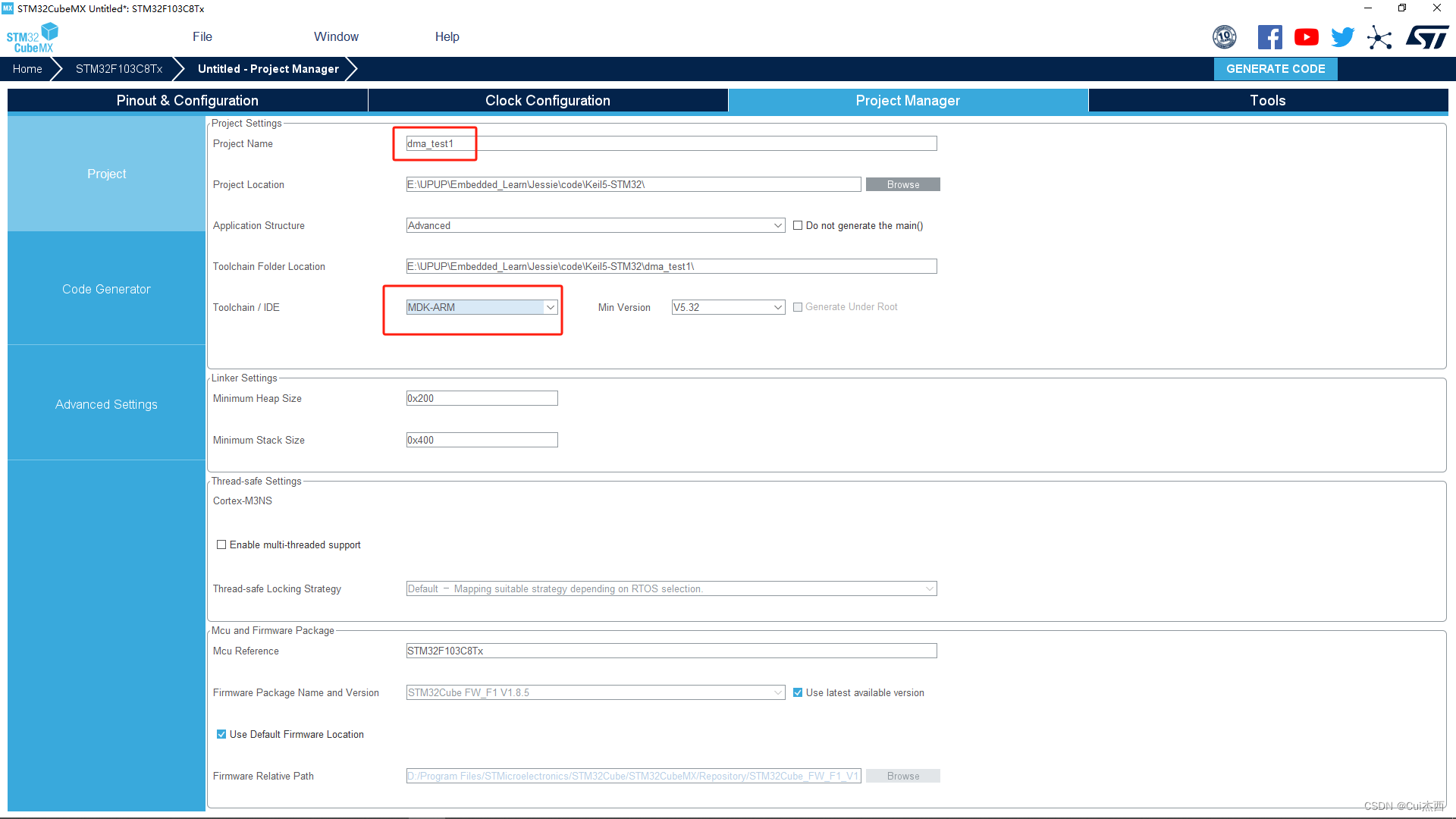
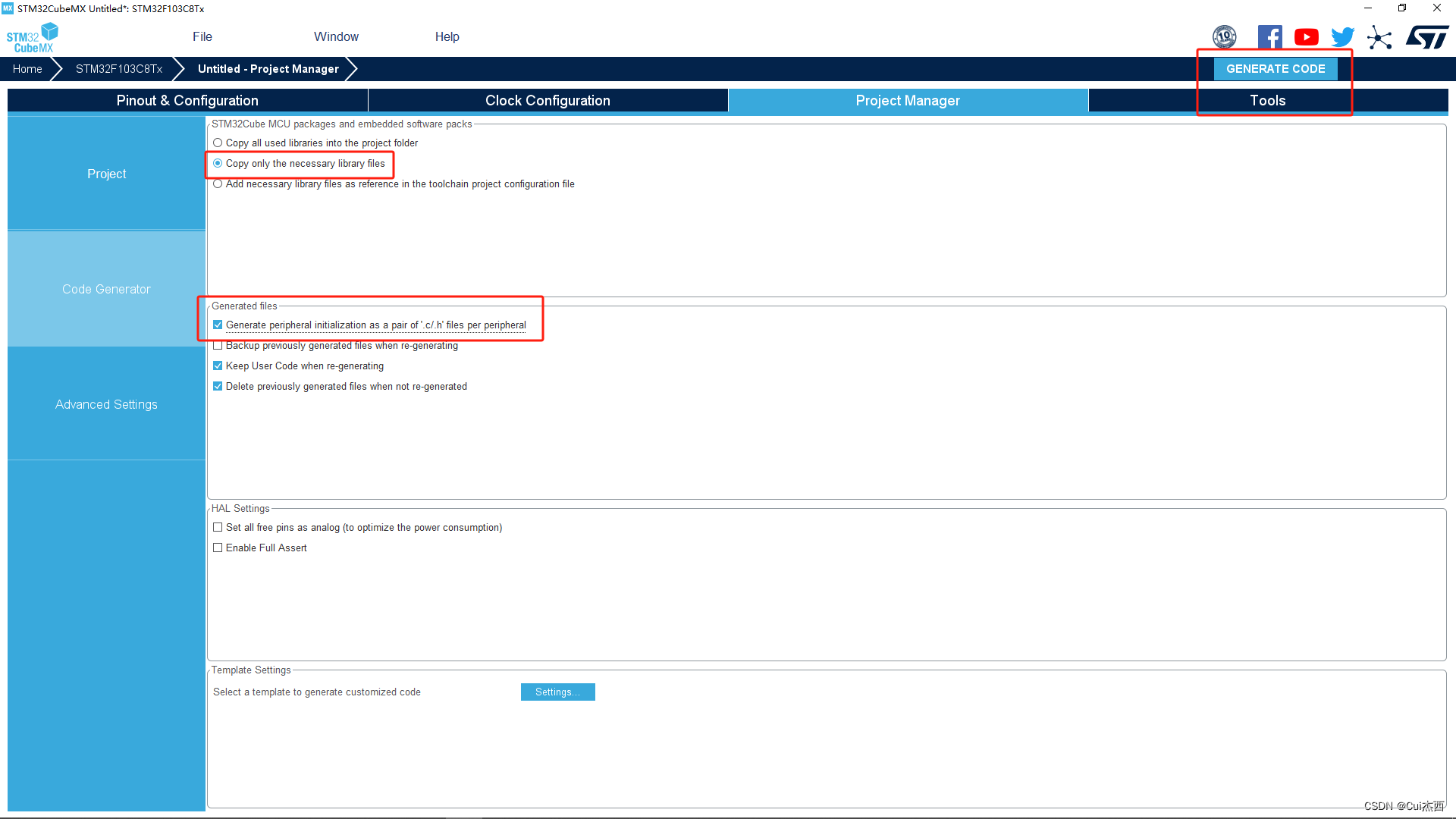
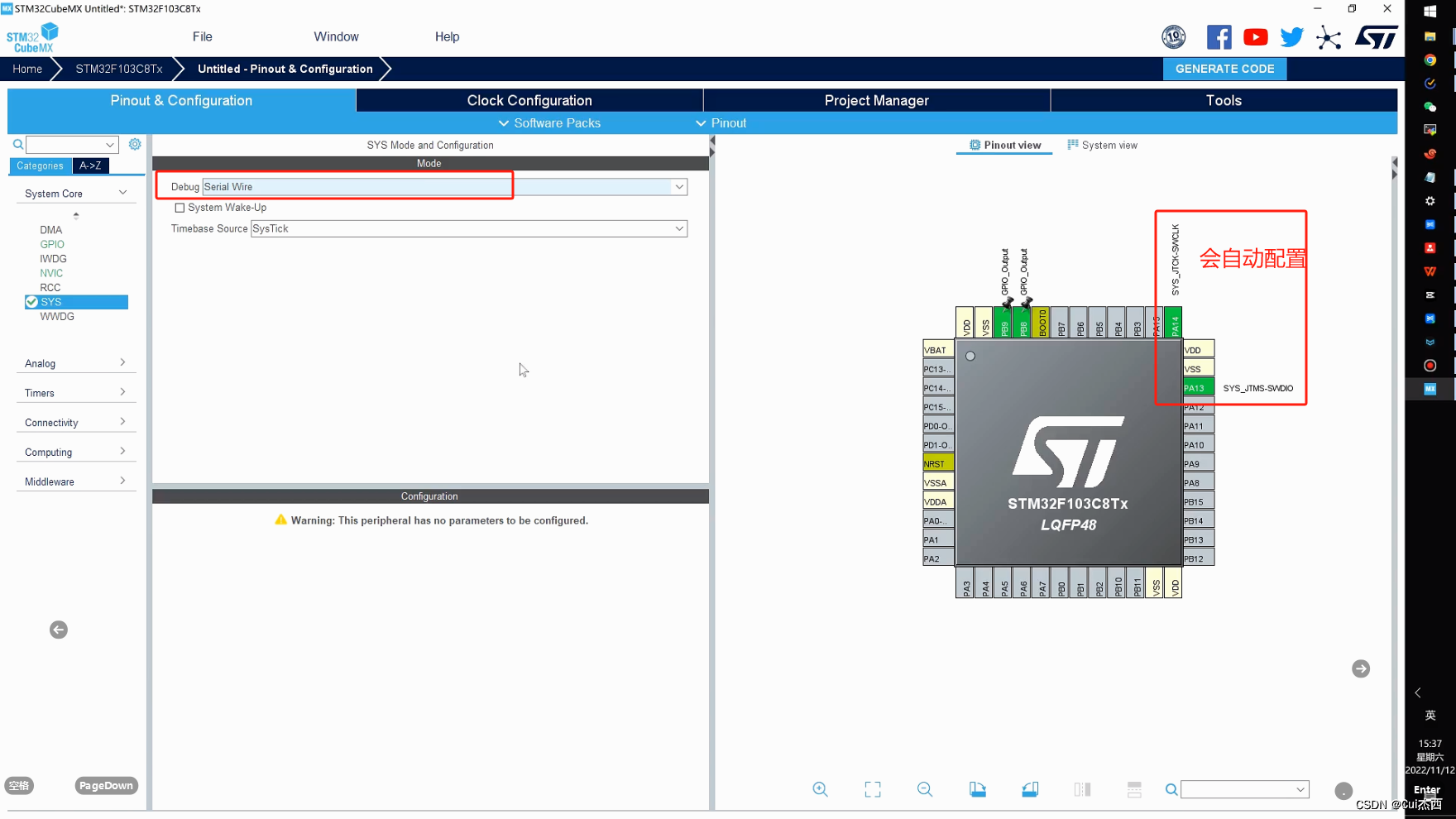
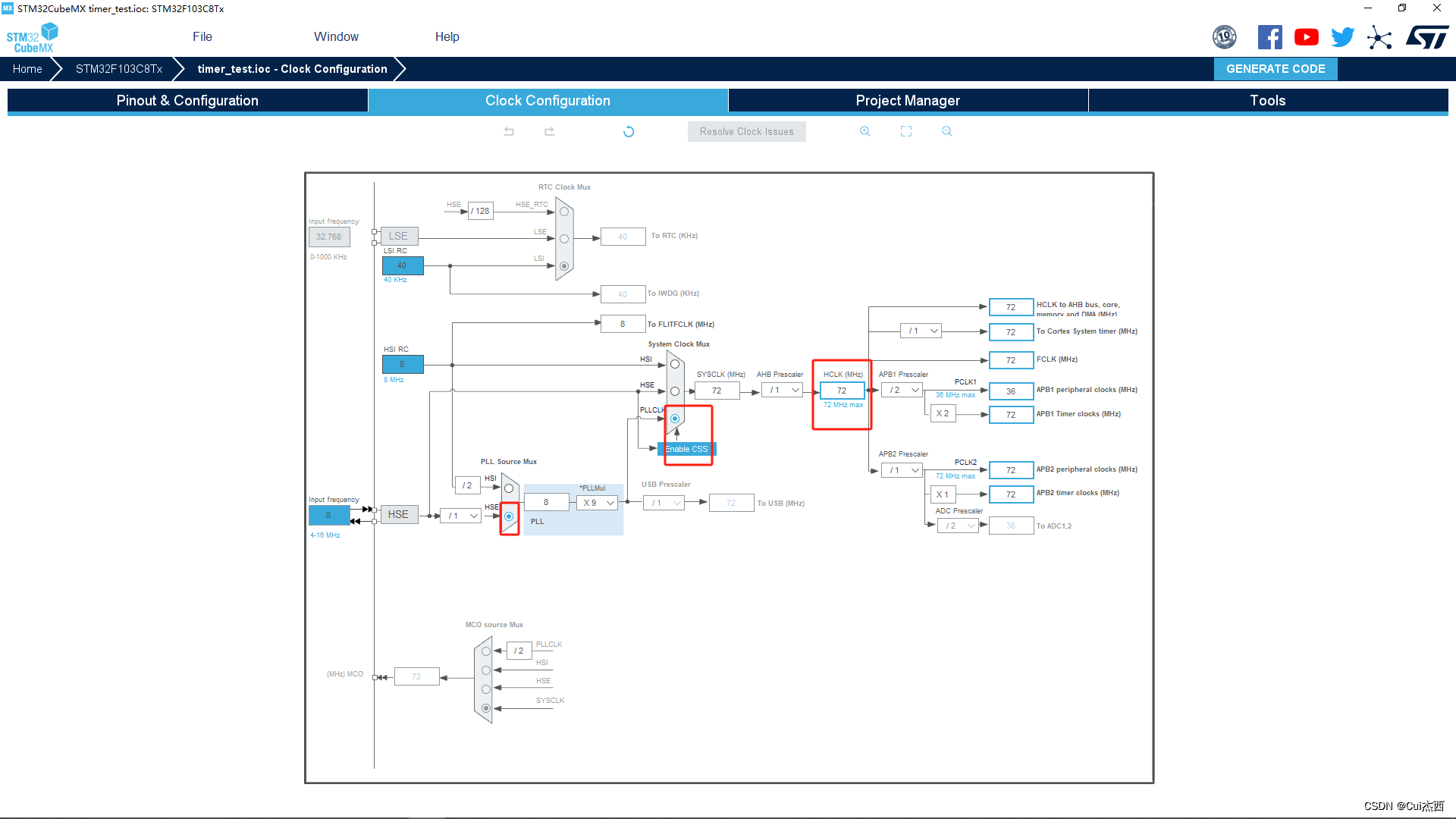
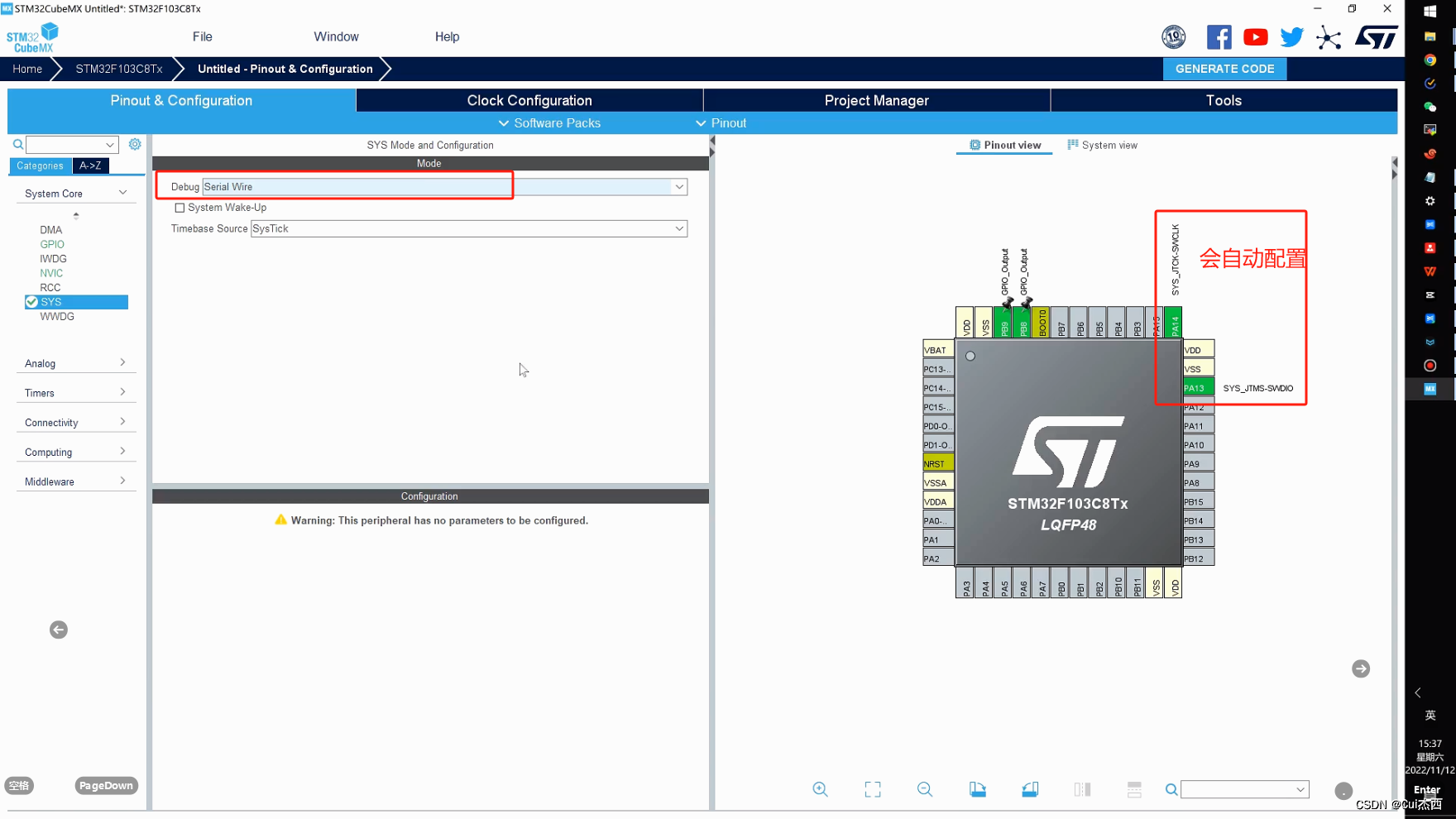
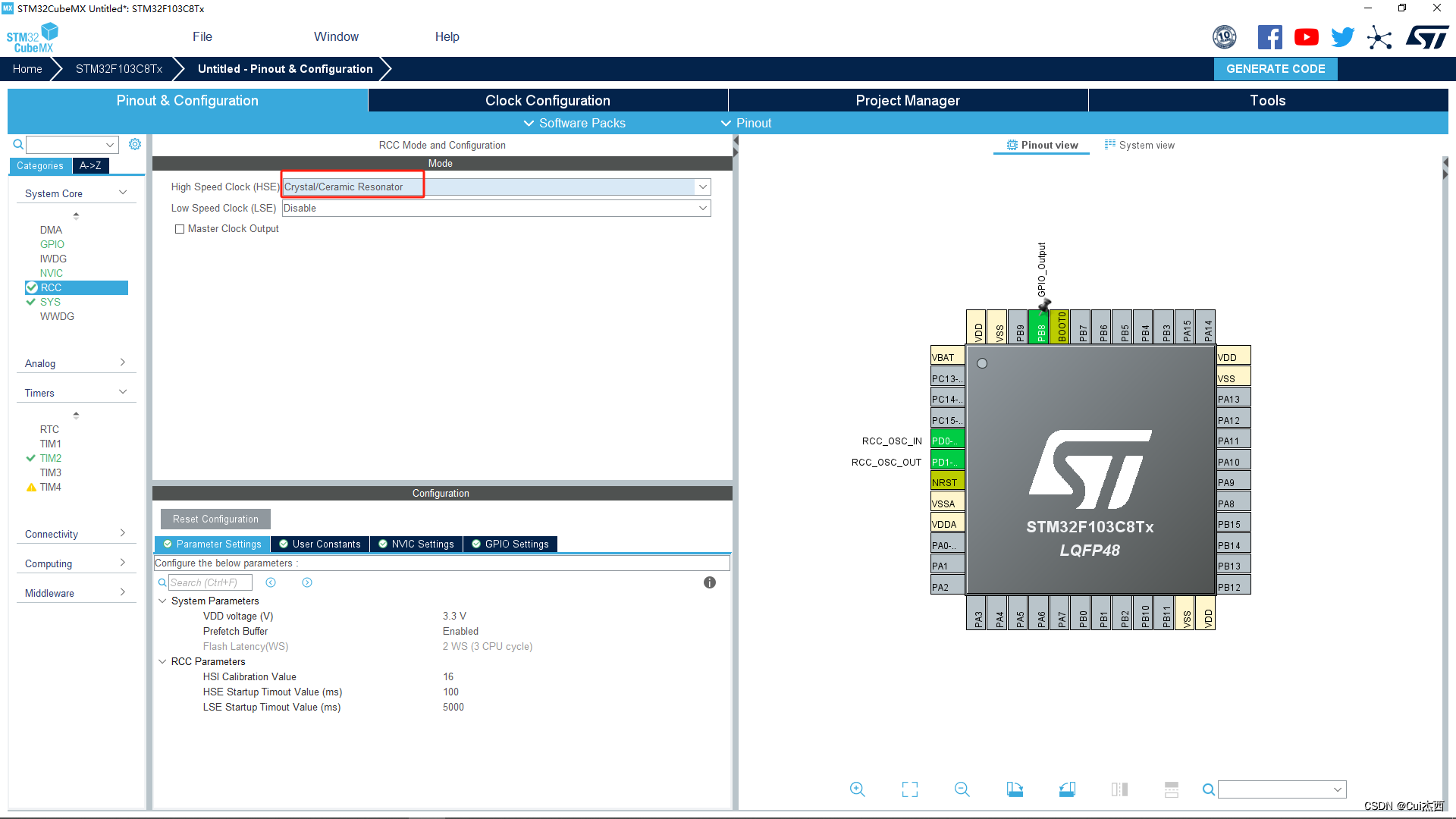
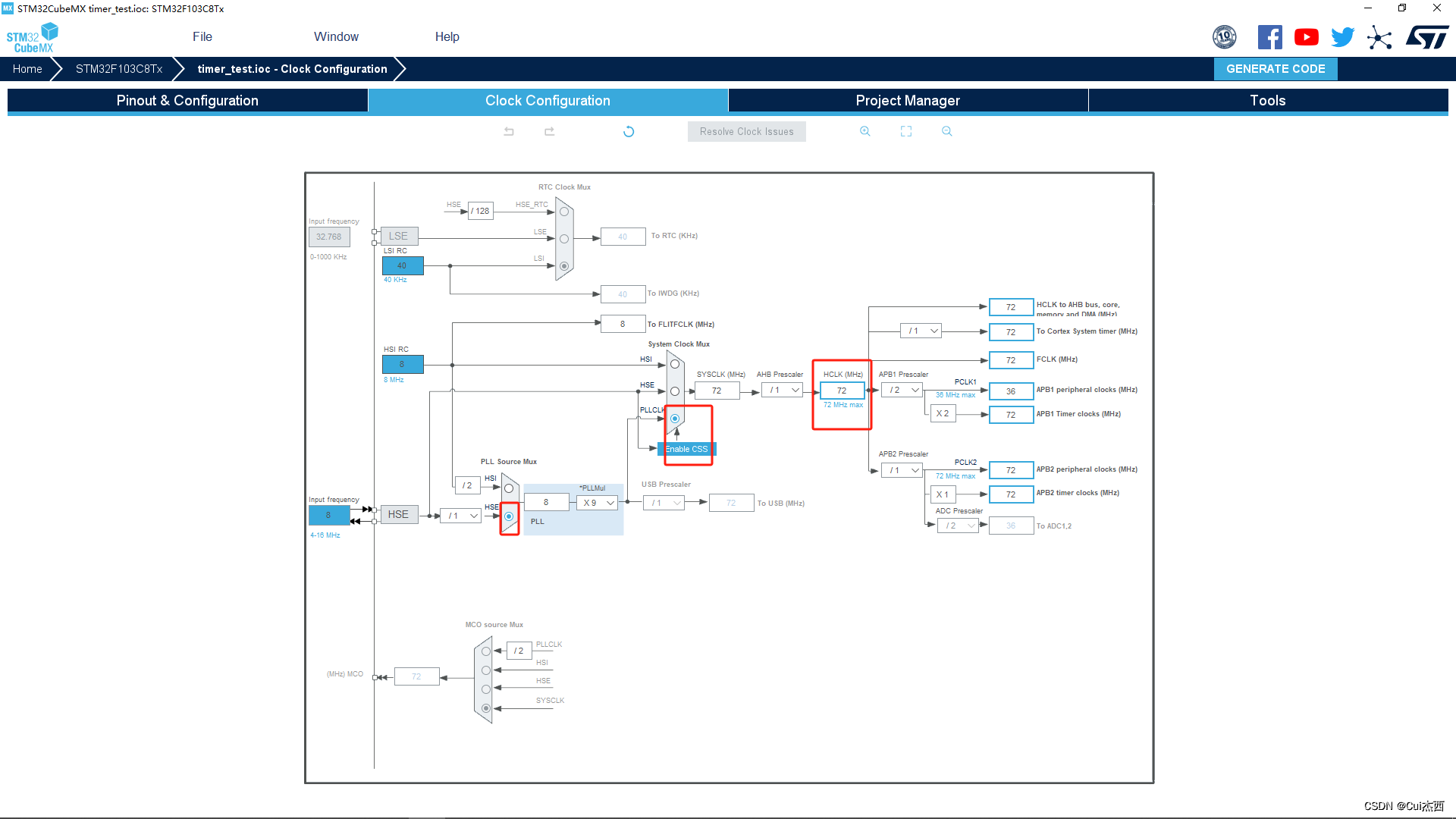
- STM32CubeMx工程配置



3. 窗口看门狗WWDG介绍(343.47)
什么是窗口看门狗?
- 窗口看门狗用于监测单片机程序运行时效是否精准,主要检测软件异常,一般用于需要精准检测程序运行时
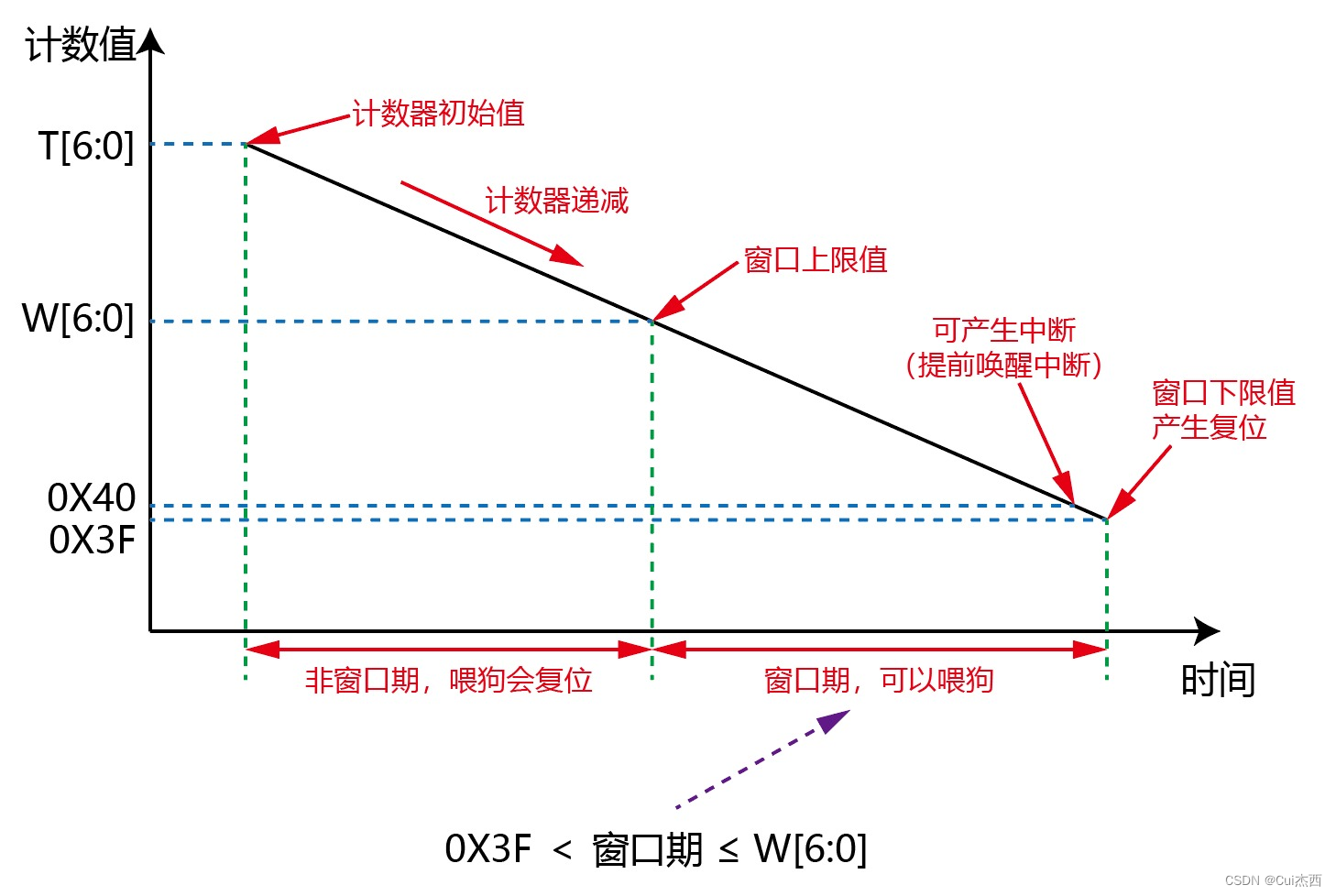
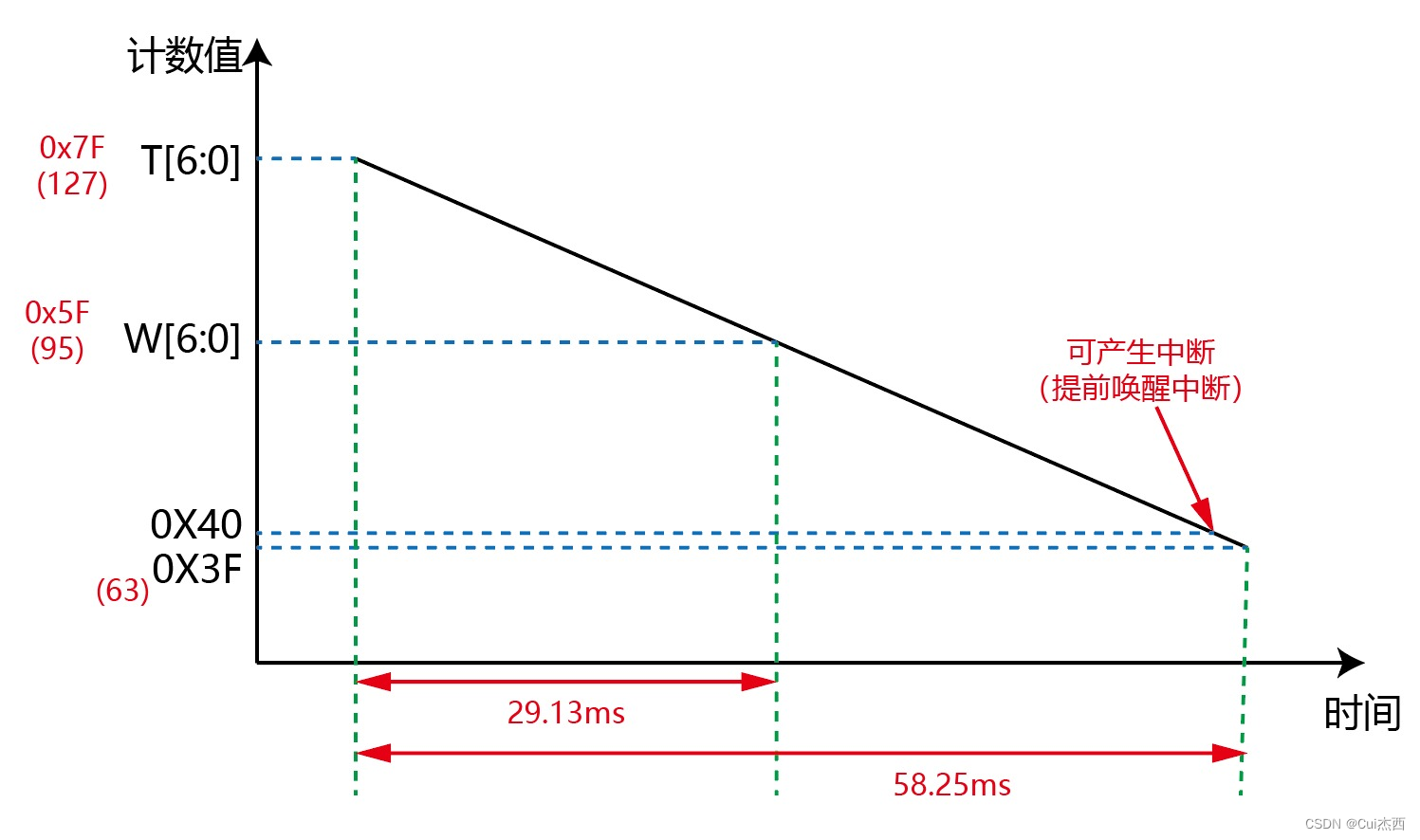
间的场合。 - 窗口看门狗的本质是一个能产生系统复位信号和提前唤醒中断的6位计数器。
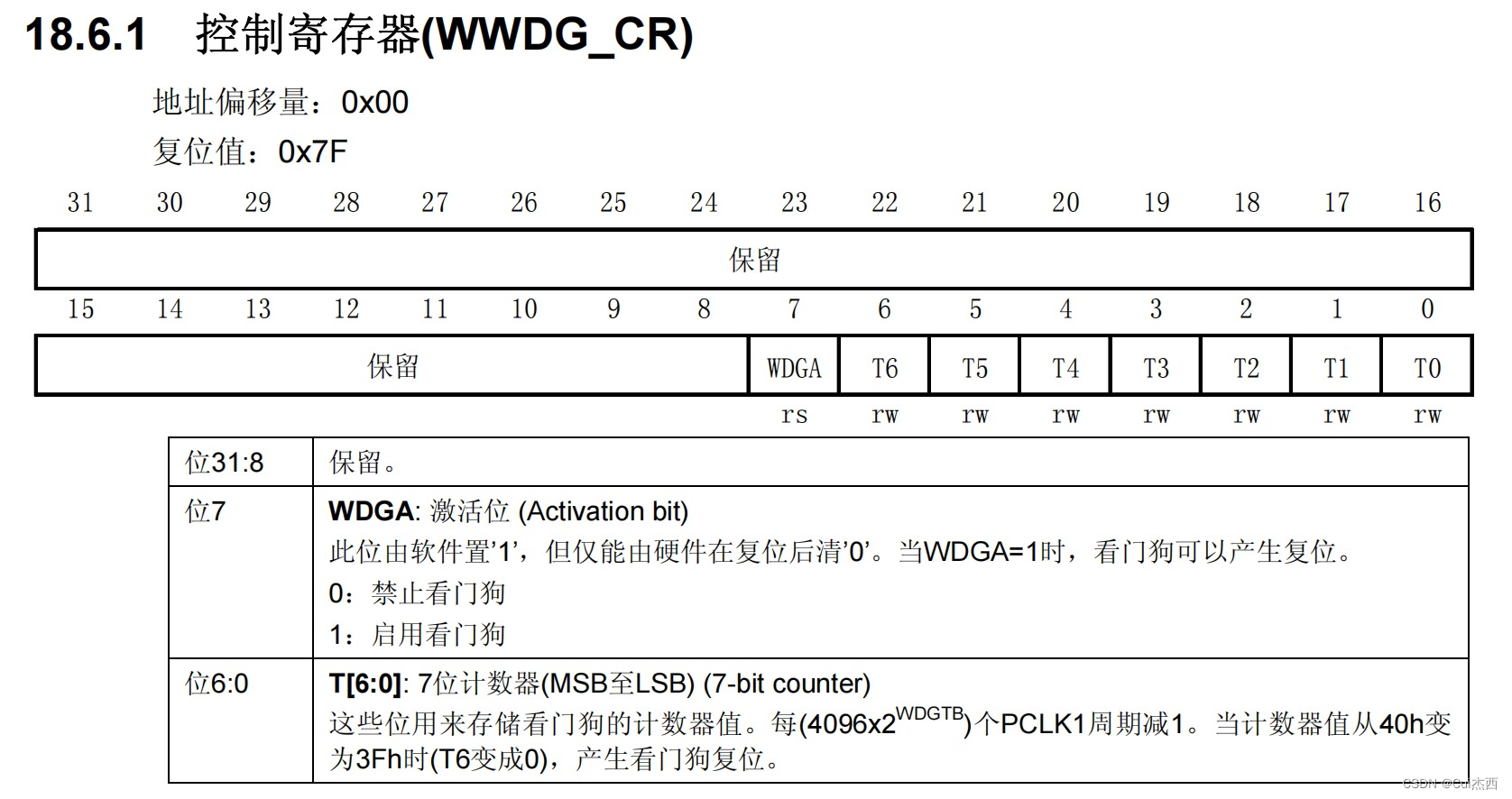
- 产生复位条件:
- 当递减计数器值从 0x40 减到 0x3F 时复位(即T6位跳变到0)
- 计数器的值大于 W[6:0] 值时喂狗会复位。
- 产生中断条件:
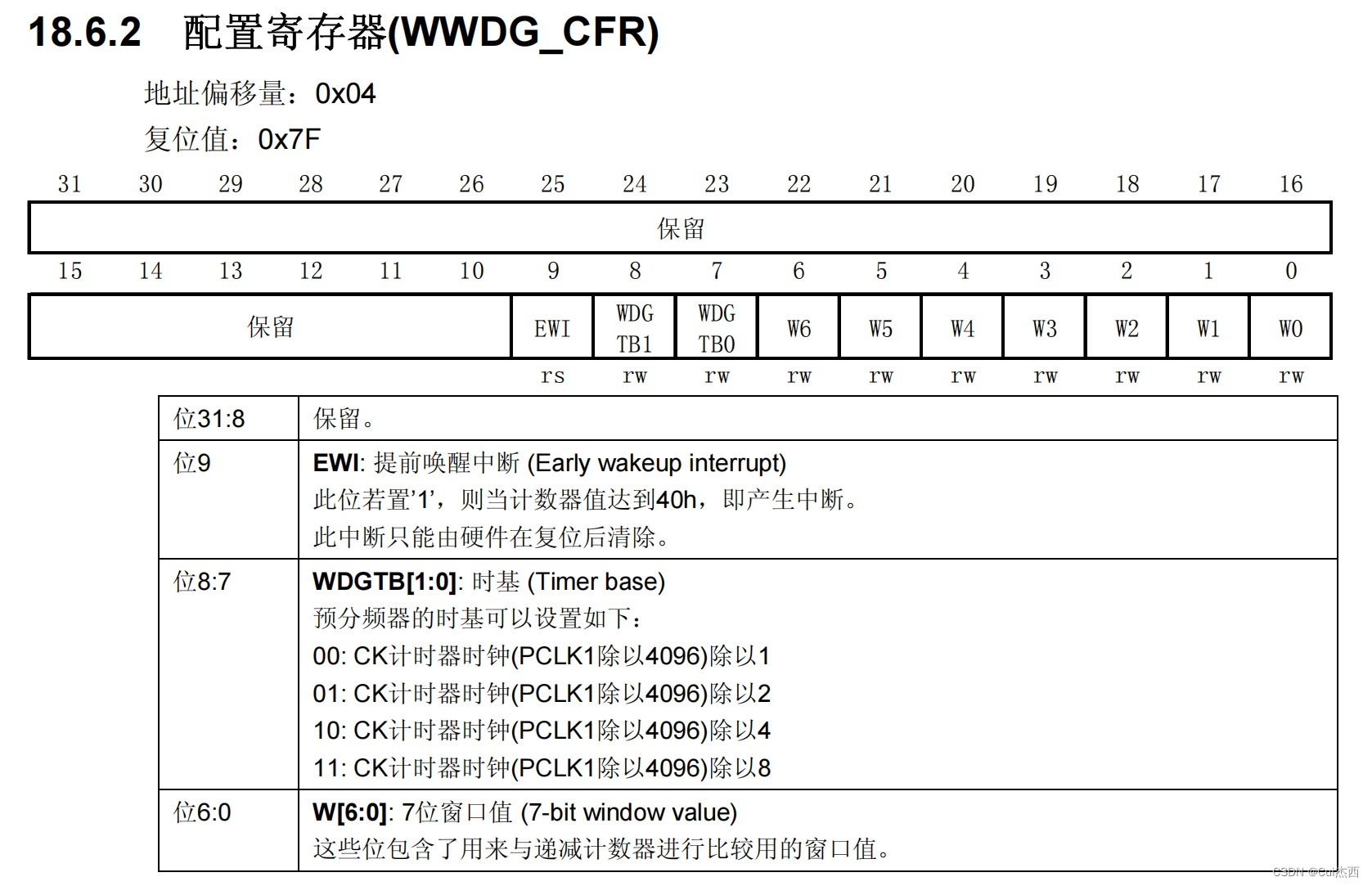
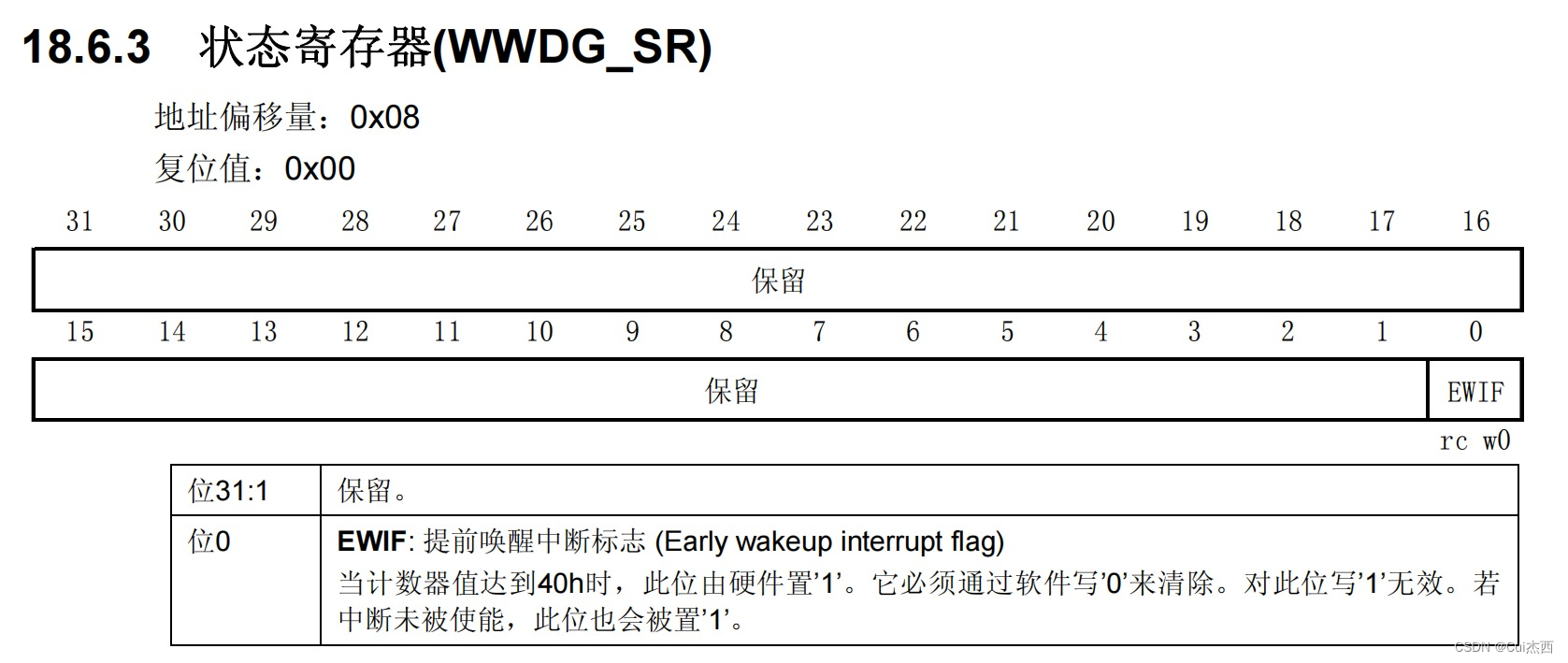
- 当递减计数器等于 0x40 时可产生提前唤醒中断 (EWI)。
- 在窗口期内重装载计数器的值,防止复位,也就是所谓的喂狗。
窗口看门狗工作原理
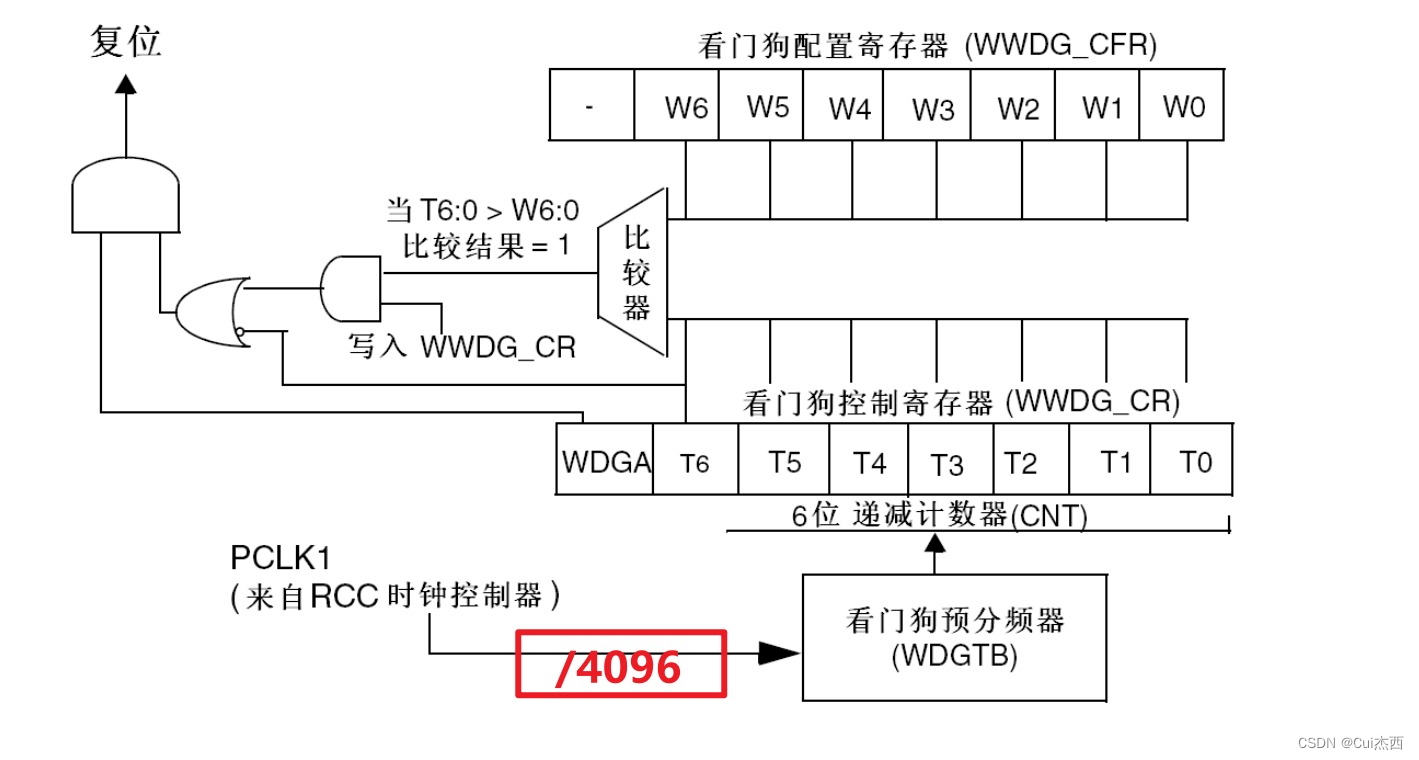
控制寄存器
配置寄存器
状态寄存器
超时时间计算
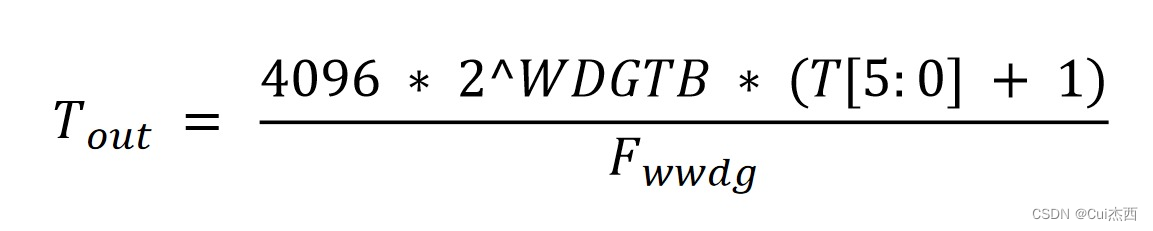
- Tout 是 WWDG 超时时间(没喂狗)
- Fwwdg 是 WWDG 的时钟源频率(最大36M)
- 4096 是 WWDG 固定的预分频系数
- 2^WDGTB 是 WWDG_CFR 寄存器设置的预分频系数值
- T[5:0] 是 WWDG 计数器低 6 位,最多 63
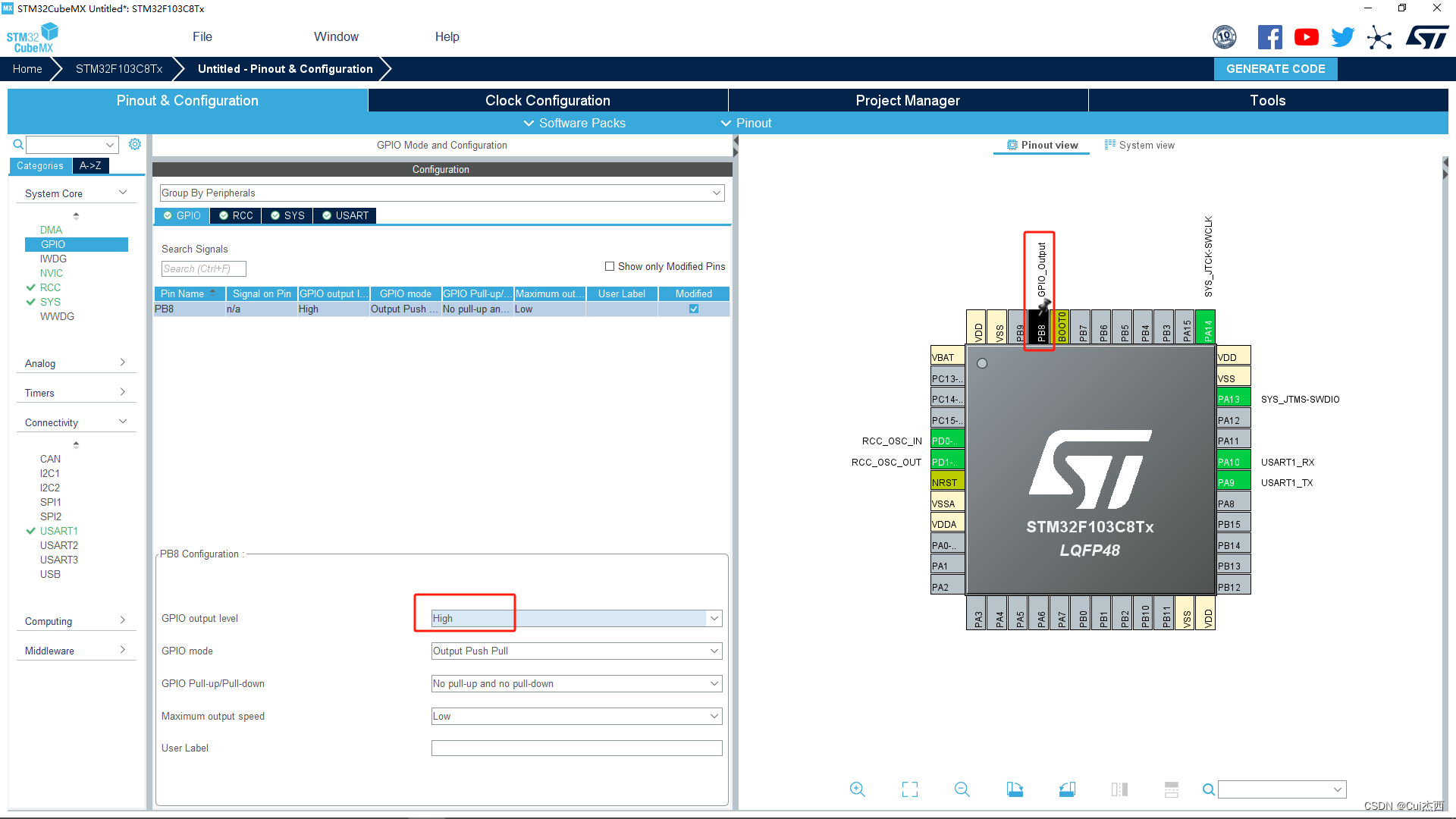
4. 窗口看门狗实验(344.48)
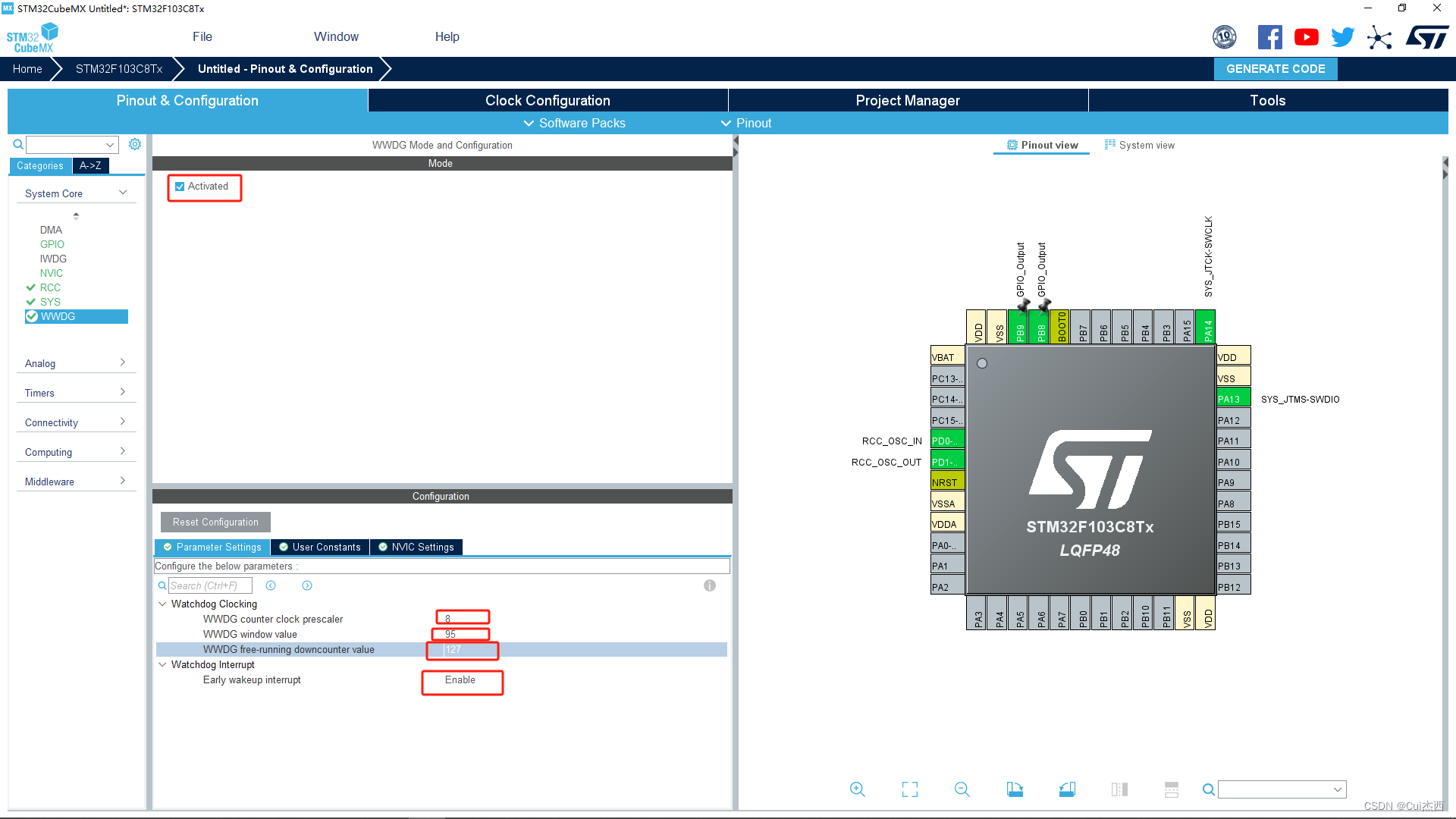
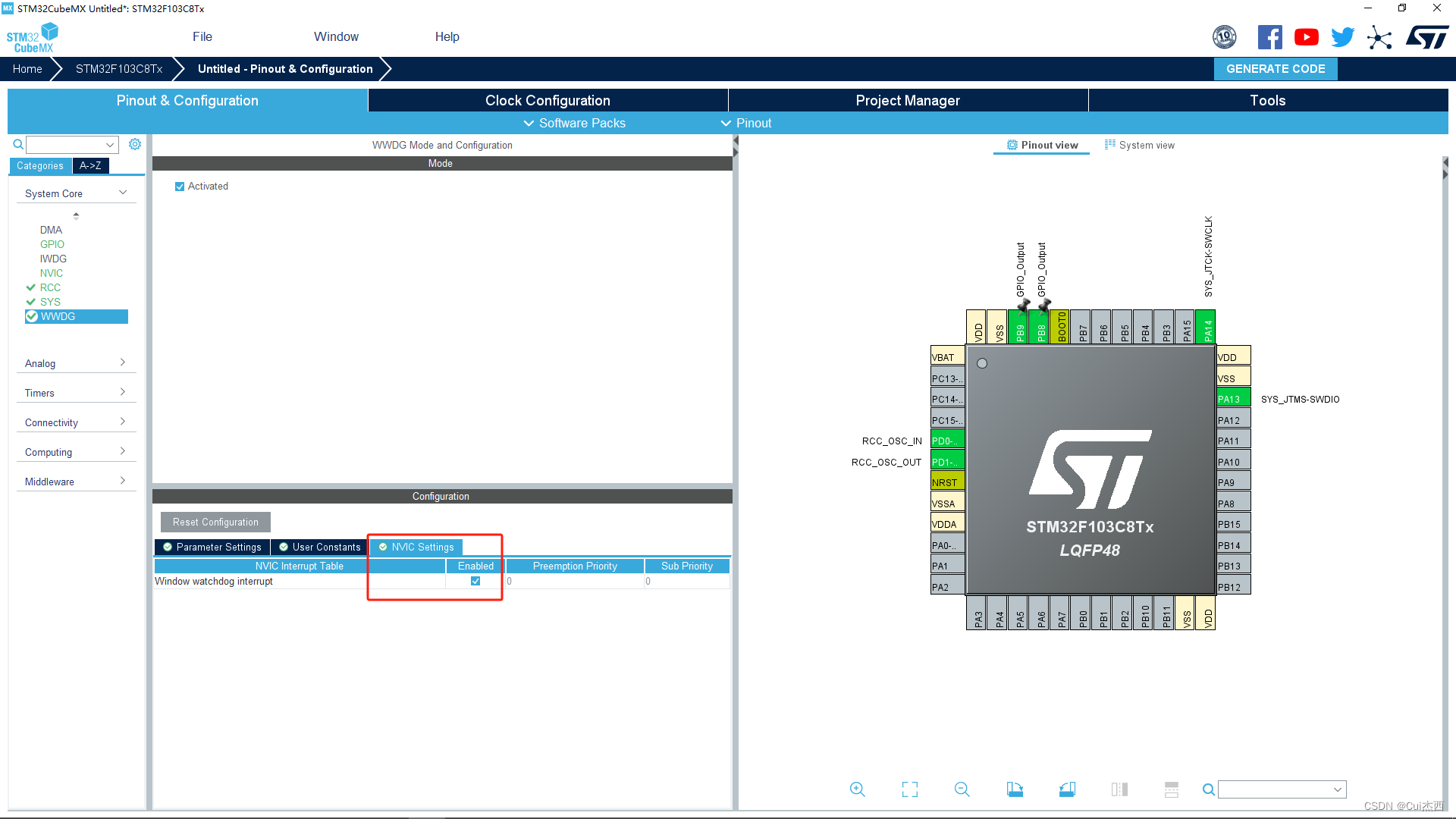
- 需求: 开启窗口看门狗,计数器值设置为 0X7F ,窗口值设置为 0X5F ,预分频系数为 8 。程序启动时点亮 LED1 ,
300ms 后熄灭。在提前唤醒中断服务函数进行喂狗,同时翻转 LED2 状态。
- 硬件接线:
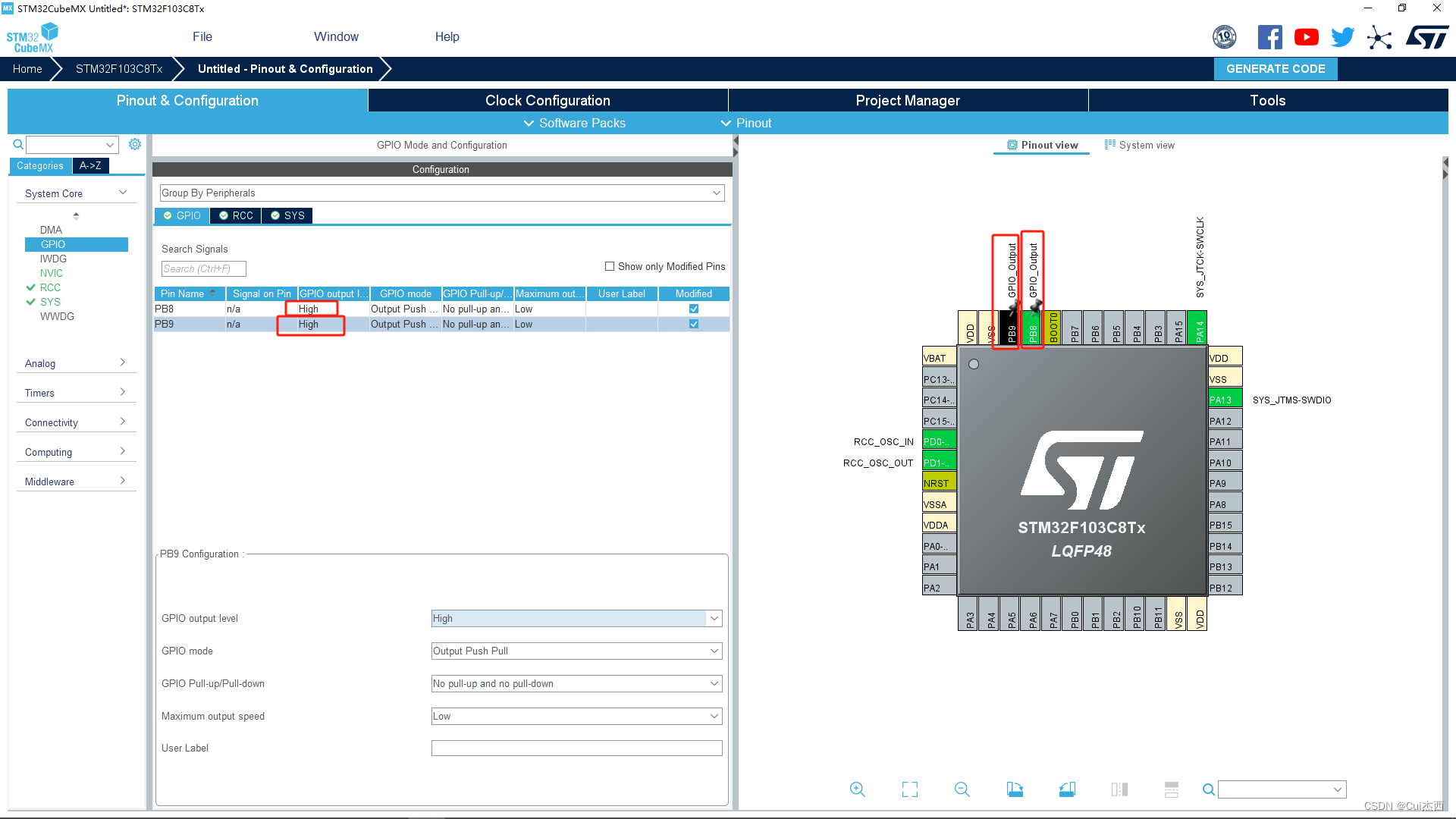
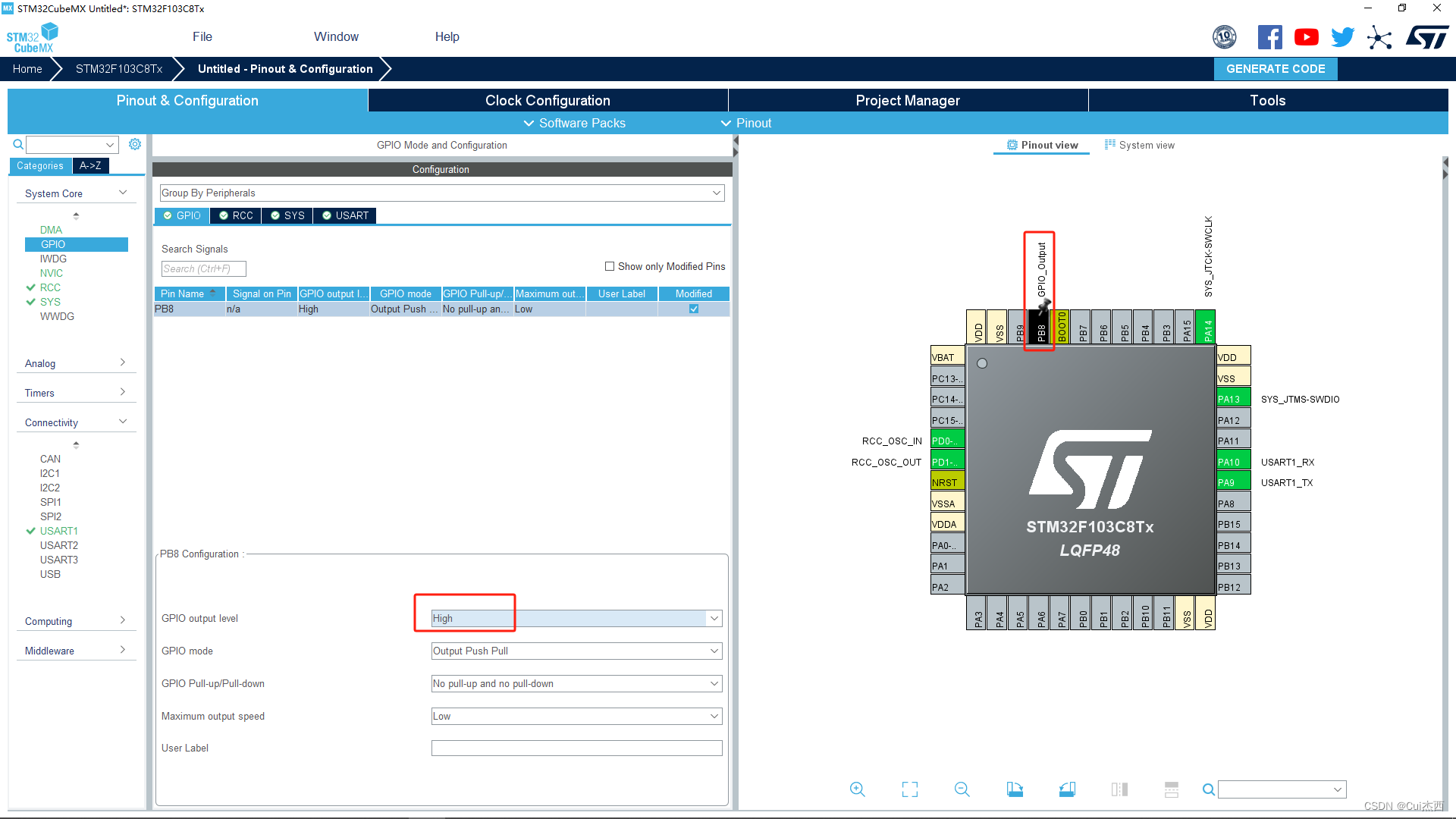
- LED1 – PB8
- LED2 – PB9
- 超时时间计算(ms): 预分频系数=8,T[6:0]=127,W[6:0]=95,Fwwdg=36MHz=36000kHz
- WWDG配置:

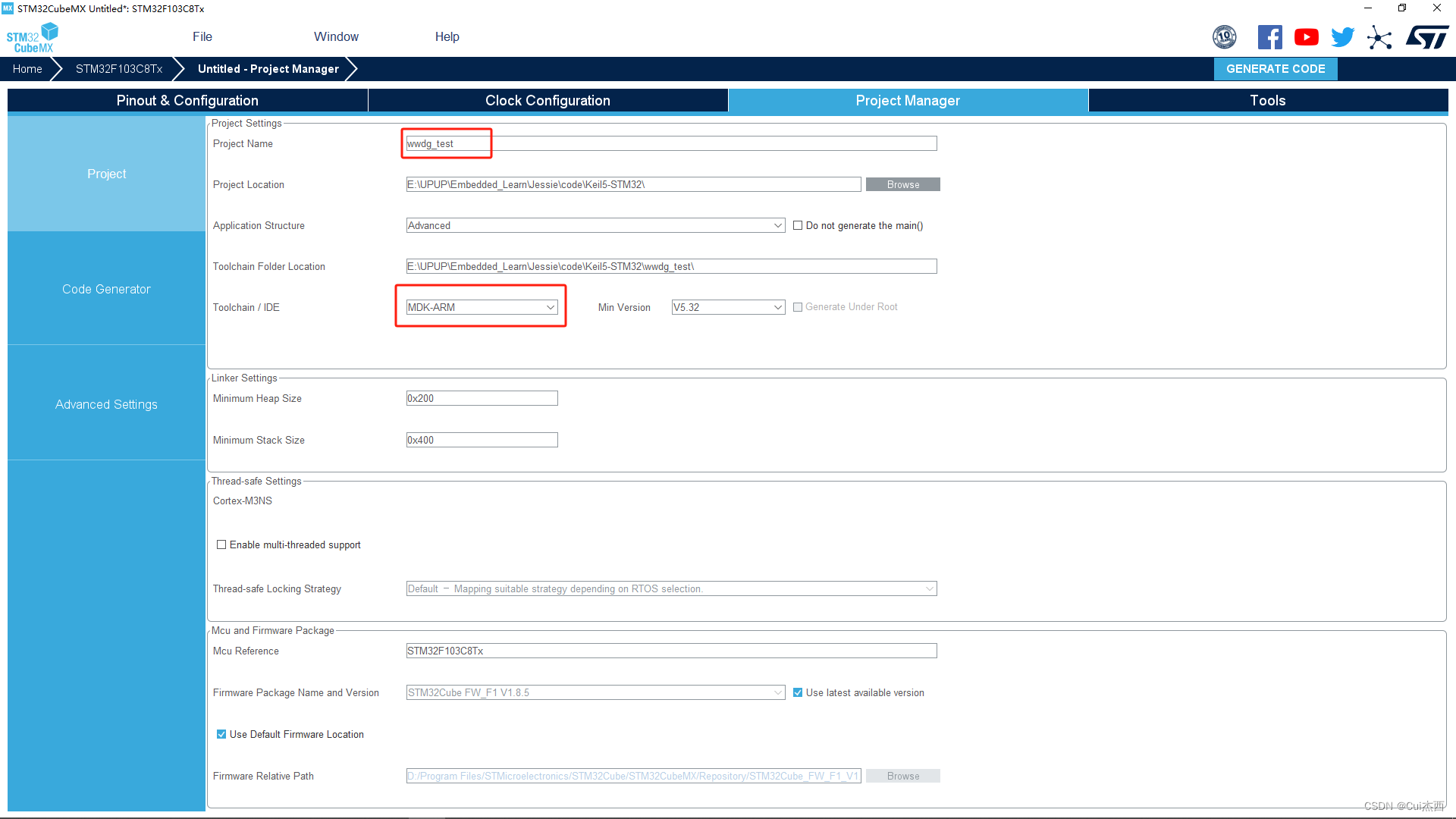

- 代码(19.wwdg_test/MDK-ARM)
void HAL_WWDG_EarlyWakeupCallback(WWDG_HandleTypeDef *hwwdg)
{HAL_WWDG_Refresh(hwwdg);//提前唤醒中断:喂狗HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_9);//喂狗之后翻转led的状态
}
int main(void)
{HAL_Init();SystemClock_Config();MX_GPIO_Init();HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);HAL_Delay(300);//HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);MX_WWDG_Init();while (1){HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);HAL_Delay(40);}
}
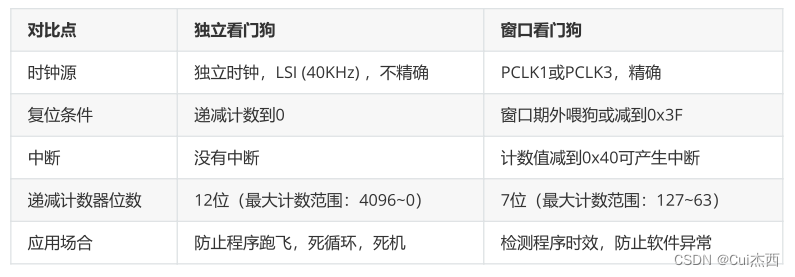
5. 独立看门狗和窗口看门狗异同点(345.49)
6. DMA介绍
什么是DMA?
- 令人头秃的描述:
- DMA(Direct Memory Access,直接存储器访问) 提供在外设与内存、存储器和存储器、外设与外设之间的高速数据传输使用。
- 它允许不同速度的硬件装置来沟通,而不需要依赖于 CPU,在这个时间中,CPU 对于内存的工作来说就无法使用。
- 简单描述:就是一个数据搬运工
DMA的意义
- 代替 CPU 搬运数据,为 CPU 减负。
- 数据搬运的工作比较耗时间;
- 数据搬运工作时效要求高(有数据来就要搬走);
- 没啥技术含量(CPU 节约出来的时间可以处理更重要的事)。

搬运什么数据?
- 存储器、外设
这里的外设指的是 spi、usart、iic、adc 等基于 APB1 、APB2 或 AHB 时钟的外设,而这里的存储器包括自身的闪存(flash)或者内存(SRAM)以及外设的存储设备都可以作为访问地源或者目的。
- 三种搬运方式:
- 存储器→存储器(例如:复制某特别大的数据 buf)
- 存储器→外设 (例如:将某数据 buf 写入串口 TDR 寄存器)
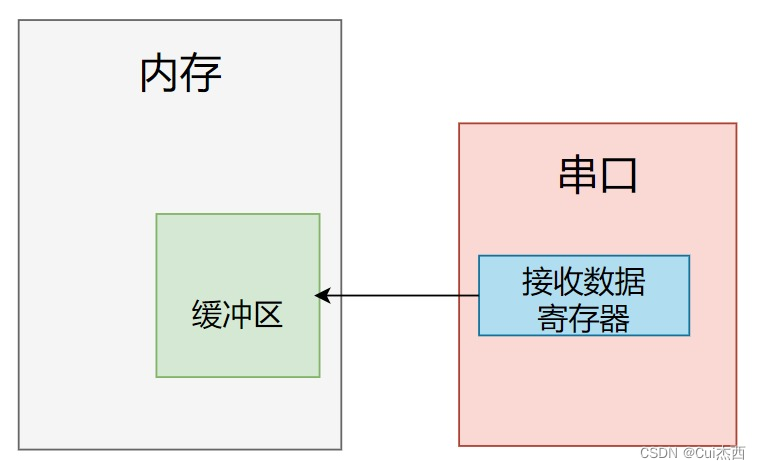
- 外设→存储器 (例如:将串口 RDR 寄存器写入某数据 buf)
存储器→存储器

存储器→外设

外设→存储器
DMA 控制器
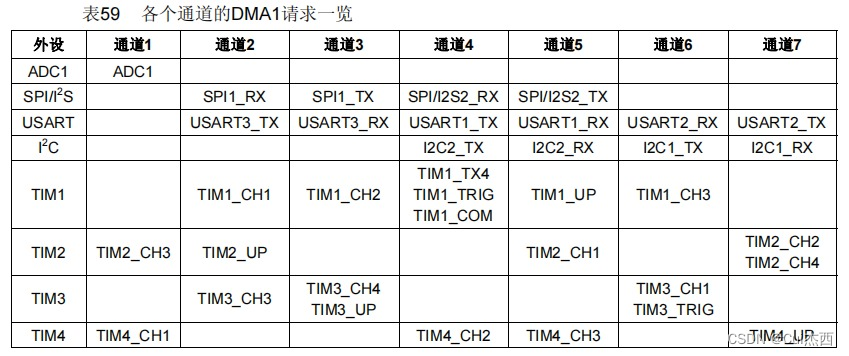
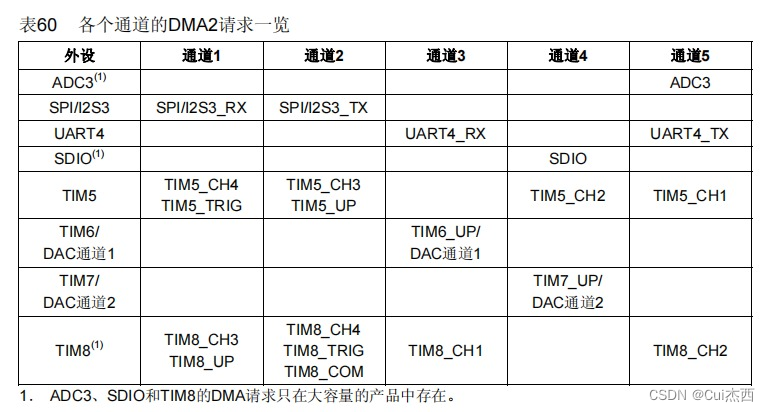
- STM32F103 有 2 个 DMA 控制器,DMA1 有 7 个通道,DMA2 有 5 个通道。
- 一个通道每次只能搬运一个外设的数据。如果同时有多个外设的 DMA 请求,则按照优先级进行响应。
- DMA1 有 7 个通道:
- DMA2 有 5 个通道:
DMA及通道的优先级
- 优先级管理采用软件+硬件:
- 软件: 每个通道的优先级可以在 DMA_CCRx 寄存器中设置,有 4 个等级
最高级 > 高级 > 中级 > 低级 - 硬件: 如果 2 个请求,它们的软件优先级相同,则较低编号的通道比较高编号的通道有较高的优先权。
比如:如果软件优先级相同,通道 2 优先于通道 4
- 软件: 每个通道的优先级可以在 DMA_CCRx 寄存器中设置,有 4 个等级
DMA传输方式
- DMA_Mode_Normal(正常模式)
- 一次 DMA 数据传输完后,停止 DMA 传送 ,也就是只传输一次
- DMA_Mode_Circular(循环传输模式)
当传输结束时,硬件自动会将传输数据量寄存器进行重装,进行下一轮的数据传输。 也就是多次传输
模式
指针递增模式
- 外设和存储器指针在每次传输后可以自动向后递增或保持常量。当设置为增量模式时,下一个要传输的地址
将是前一个地址加上增量值。
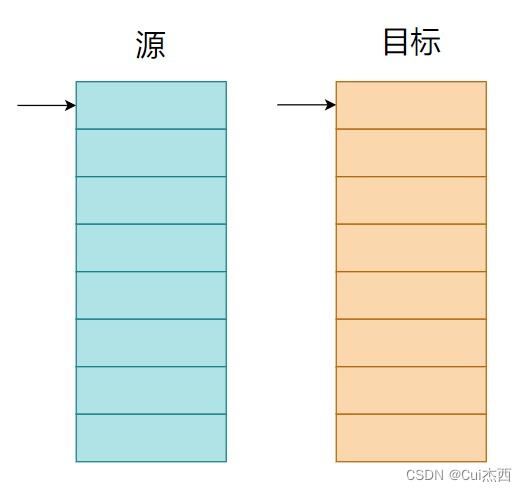
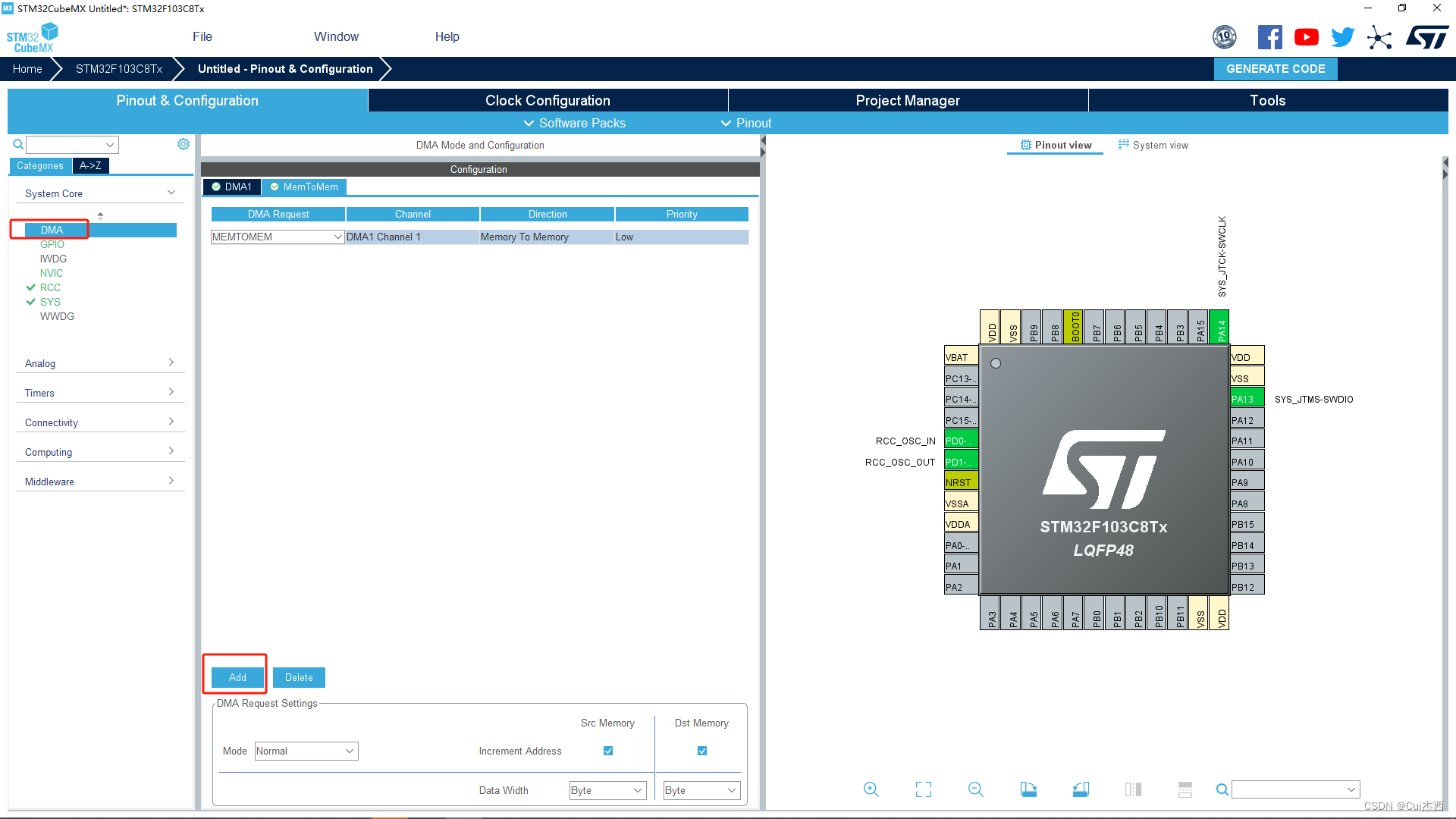
7. DMA实验1(内存到内存)
实验要求和配置
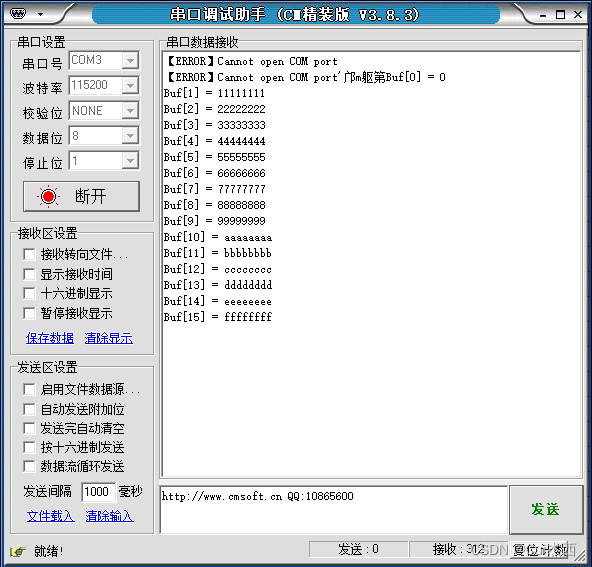
- 使用 DMA 的方式将数组 A 的内容复制到数组 B 中,搬运完之后将数组 B 的内容打印到屏幕。
- STM32CubeMx工程配置

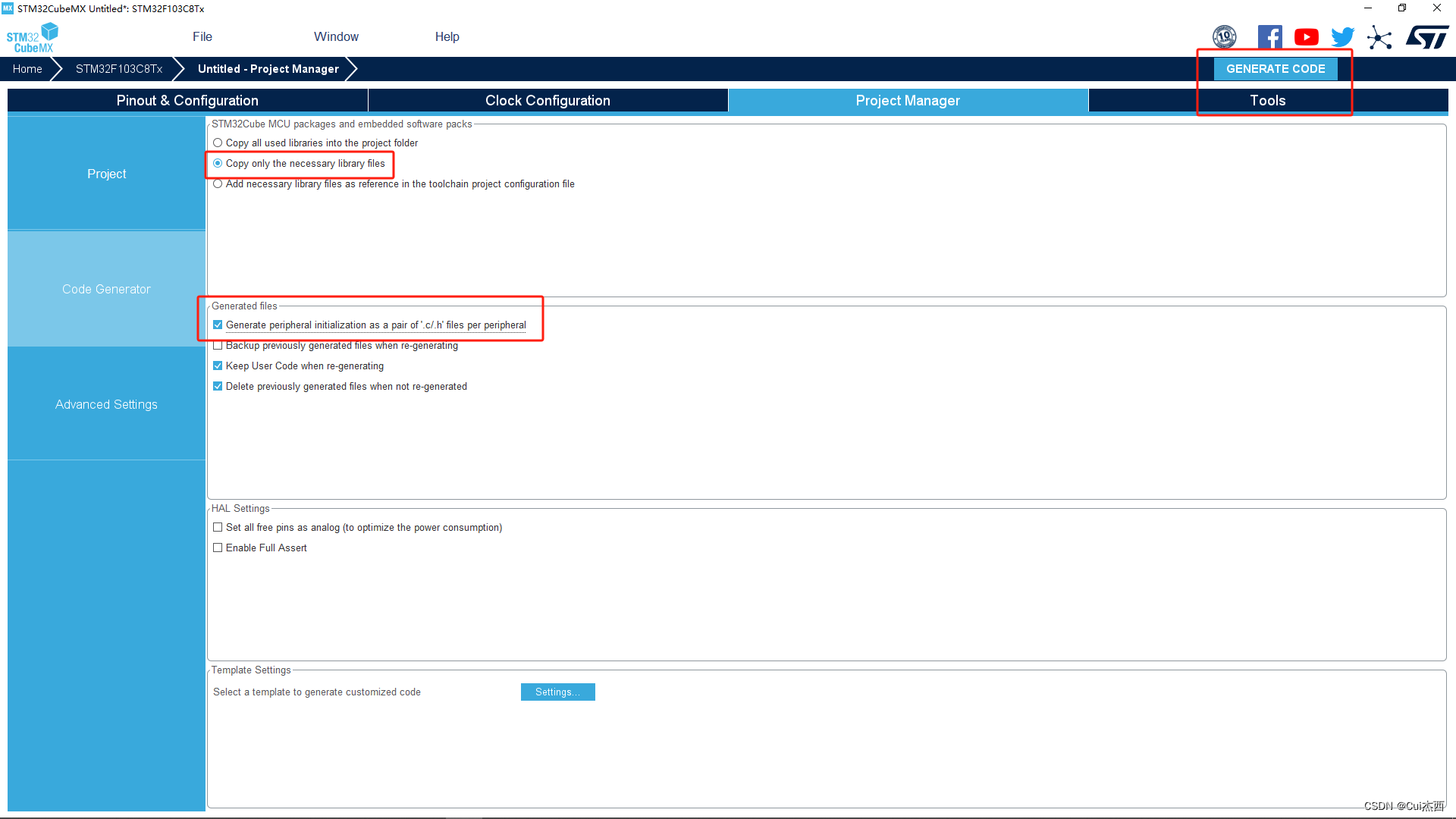
- 重定向 printf 的话记得将下面这个勾打开:
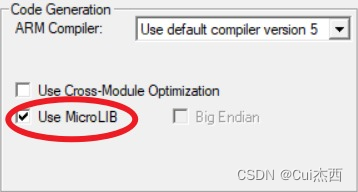
用到的库函数
HAL_DMA_Start
HAL_StatusTypeDef HAL_DMA_Start(DMA_HandleTypeDef *hdma, uint32_t SrcAddress,
uint32_t DstAddress, uint32_t DataLength)
参数一:DMA_HandleTypeDef *hdma,DMA通道句柄
参数二:uint32_t SrcAddress,源内存地址
参数三:uint32_t DstAddress,目标内存地址
参数四:uint32_t DataLength,传输数据长度。注意:需要乘以sizeof(uint32_t)
返回值:HAL_StatusTypeDef,HAL状态(OK,busy,ERROR,TIMEOUT)
__HAL_DMA_GET_FLAG
#define __HAL_DMA_GET_FLAG(__HANDLE__, __FLAG__) (DMA1->ISR & (__FLAG__))
参数一:HANDLE,DMA通道句柄
参数二:FLAG,数据传输标志。DMA_FLAG_TCx表示数据传输完成标志
返回值:FLAG的值(SET/RESET)
代码实现
- 开启数据传输
- 等待数据传输完成
- 打印数组内容
- 代码(20.dma_test1/MDK-ARM)
#define BUF_SIZE 16
// 源数组
uint32_t srcBuf[BUF_SIZE] = {0x00000000,0x11111111,0x22222222,0x33333333,0x44444444,0x55555555,0x66666666,0x77777777,0x88888888,0x99999999,0xAAAAAAAA,0xBBBBBBBB,0xCCCCCCCC,0xDDDDDDDD,0xEEEEEEEE,0xFFFFFFFF
};
// 目标数组
uint32_t desBuf[BUF_SIZE];
int fputc(int ch, FILE *f)
{ unsigned char temp[1]={ch};HAL_UART_Transmit(&huart1,temp,1,0xffff); return ch;
}
int main(void)
{int i = 0;HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_DMA_Init();MX_USART1_UART_Init();// 开启数据传输HAL_DMA_Start(&hdma_memtomem_dma1_channel1,(uint32_t)srcBuf, (uint32_t)desBuf, sizeof(uint32_t) * BUF_SIZE);// 等待数据传输完成while(__HAL_DMA_GET_FLAG(&hdma_memtomem_dma1_channel1, DMA_FLAG_TC1) == RESET);// 打印数组内容for (i = 0; i < BUF_SIZE; i++)printf("Buf[%d] = %x\r\n", i, desBuf[i]);//x大/小写即输出大/小写
}
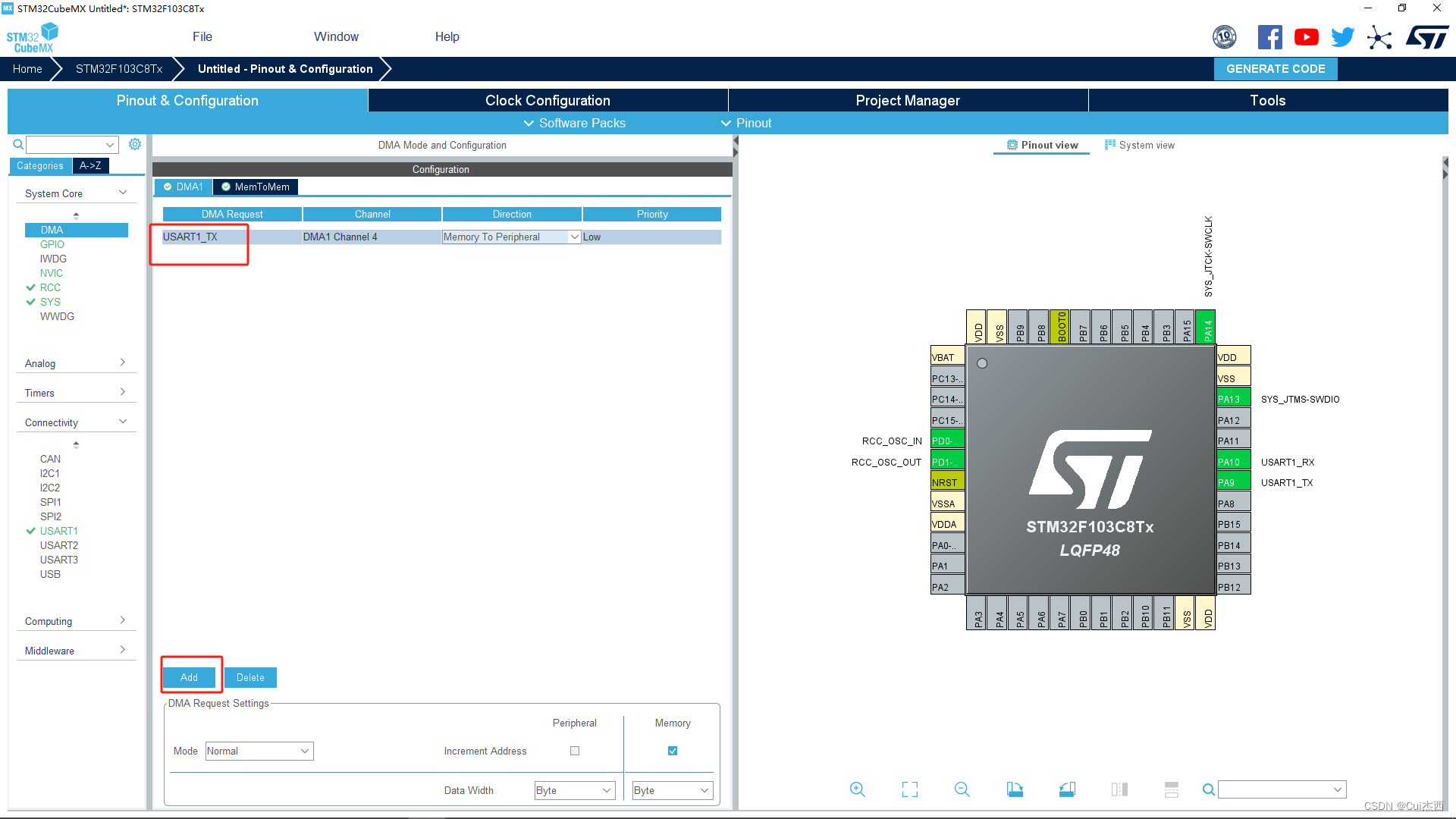
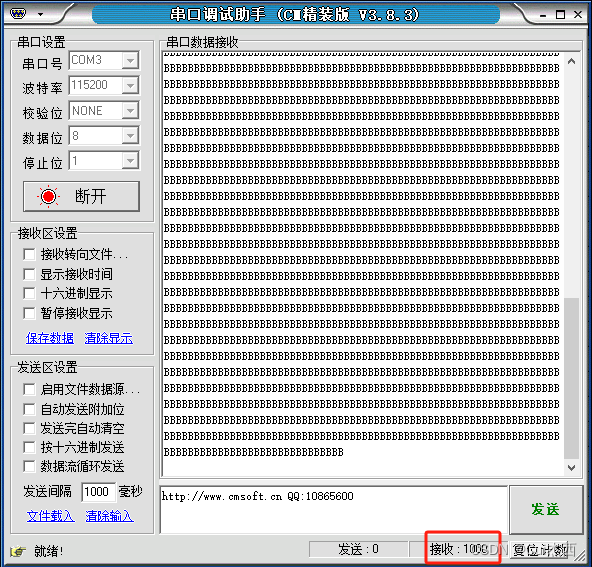
8. DMA实验2(内存到外设)
实验要求和配置
- 使用DMA的方式将内存数据搬运到串口1发送寄存器,同时闪烁LED1。
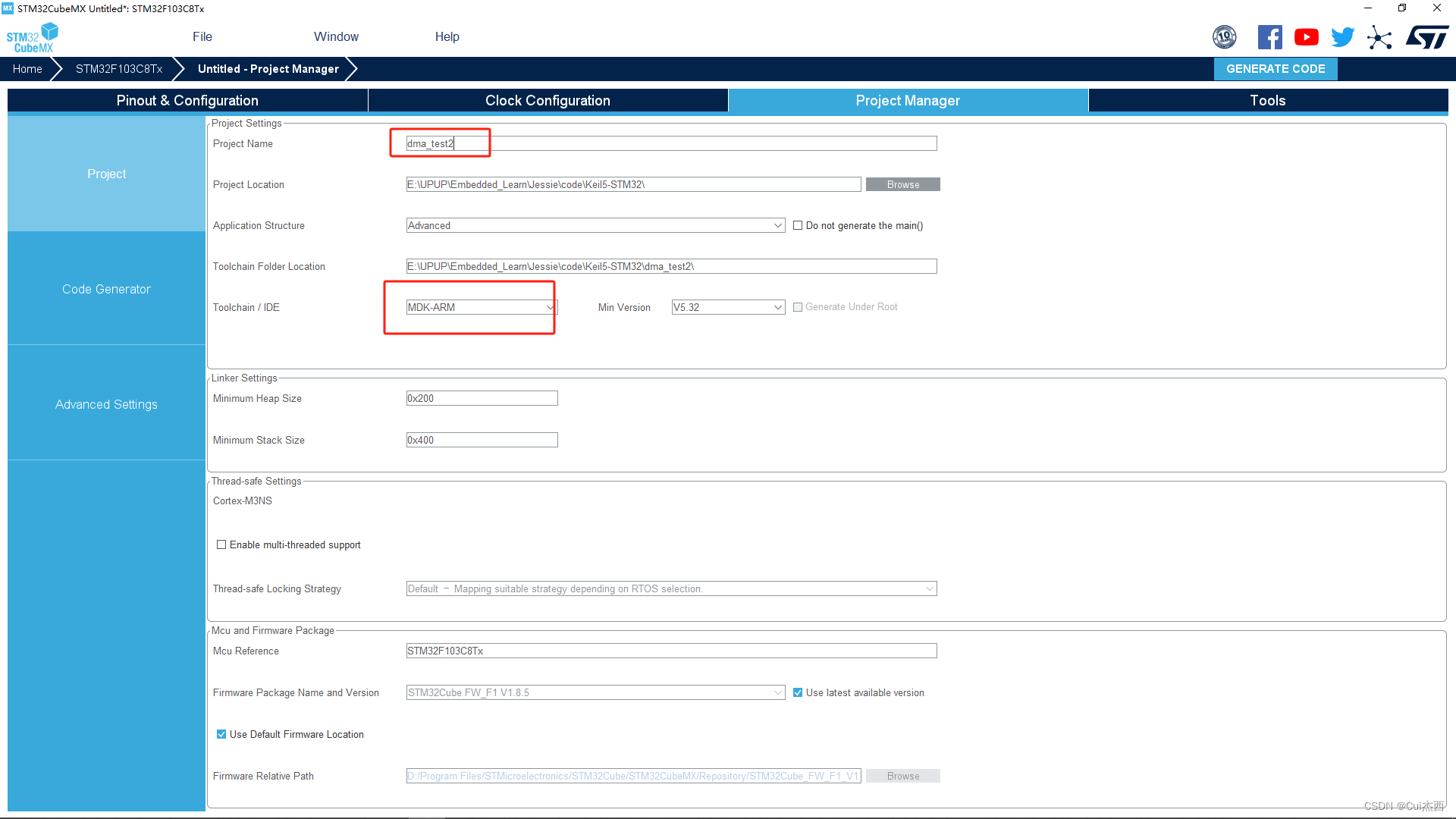
- STM32CubeMx工程配置

用到的库函数
HAL_UART_Transmit_DMA
HAL_StatusTypeDef HAL_UART_Transmit_DMA(UART_HandleTypeDef *huart, uint8_t *pData,
uint16_t Size)
参数一:UART_HandleTypeDef *huart,串口句柄
参数二:uint8_t *pData,待发送数据首地址
参数三:uint16_t Size,待发送数据长度
返回值:HAL_StatusTypeDef,HAL状态(OK,busy,ERROR,TIMEOUT)
代码实现
- 准备数据
- 将数据通过串口DMA发送
- 代码(20.dma_test2/MDK-ARM)
#define BUF_SIZE 1000
// 待发送的数据
unsigned char sendBuf[BUF_SIZE];
int main(void)
{int i = 0;HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_DMA_Init();MX_USART1_UART_Init();// 准备数据for (i = 0; i < BUF_SIZE; i++)sendBuf[i] = 'B';// 将数据通过串口DMA发送HAL_UART_Transmit_DMA(&huart1, sendBuf, BUF_SIZE);while (1){HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_8);HAL_Delay(100);}
}
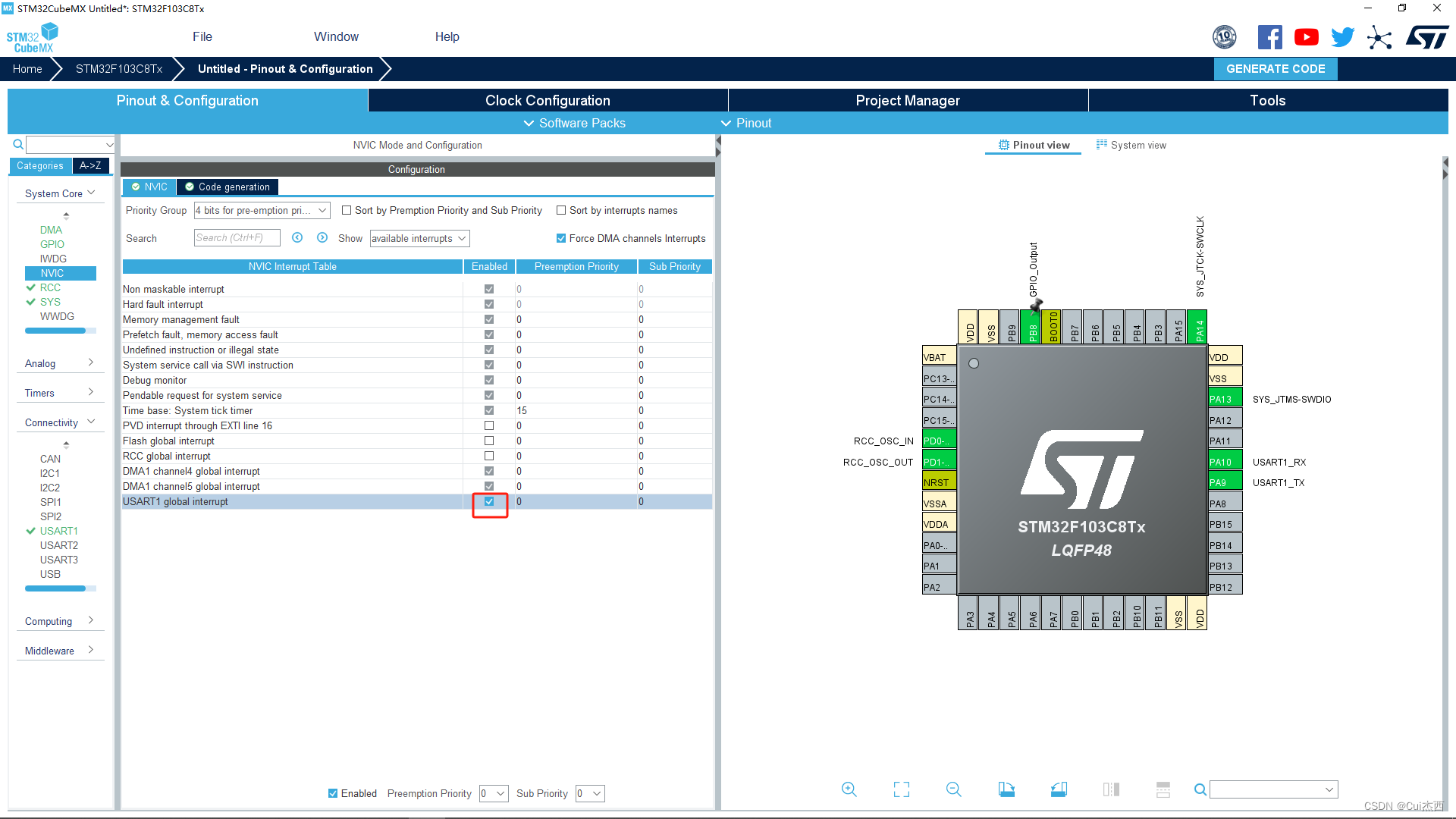
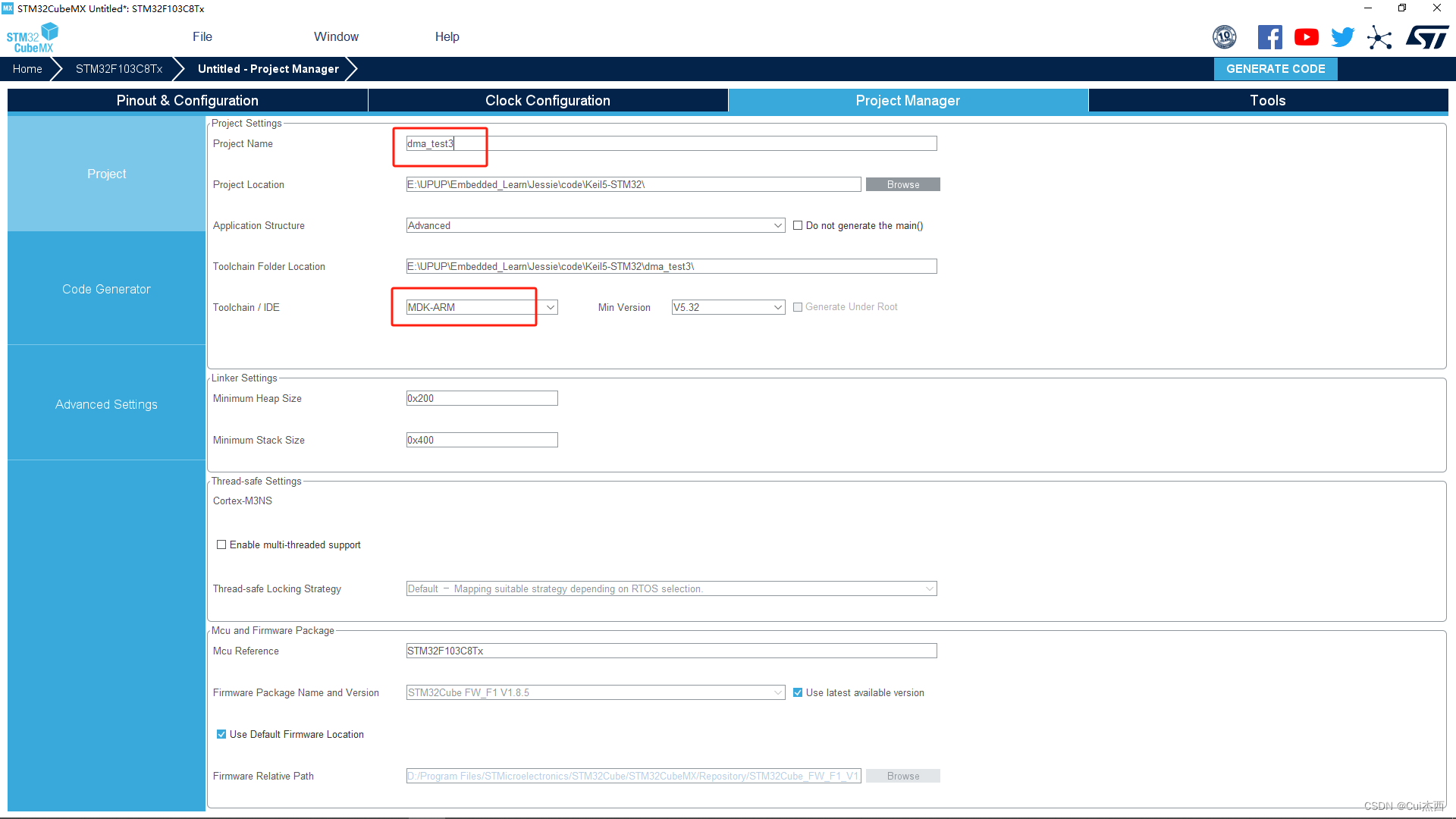
9. DMA实验3(外设到内存)
实验要求和配置
- 使用 DMA 的方式将串口接收缓存寄存器的值搬运到内存中,同时闪烁 LED1。
- STM32CubeMx工程配置


用到的库函数
__HAL_UART_ENABLE
#define __HAL_UART_ENABLE_IT(__HANDLE__, __INTERRUPT__) ((((__INTERRUPT__) >> 28U)
== UART_CR1_REG_INDEX)? ((__HANDLE__)->Instance->CR1 |= ((__INTERRUPT__) &
UART_IT_MASK)): \(((__INTERRUPT__) >> 28U)
== UART_CR2_REG_INDEX)? ((__HANDLE__)->Instance->CR2 |= ((__INTERRUPT__) &
UART_IT_MASK)): \((__HANDLE__)->Instance-
>CR3 |= ((__INTERRUPT__) & UART_IT_MASK)))
参数一:HANDLE,串口句柄
参数二:INTERRUPT,需要使能的中断
返回值:无
2. HAL_UART_Receive_DMA
HAL_StatusTypeDef HAL_UART_Receive_DMA(UART_HandleTypeDef *huart, uint8_t *pData,
uint16_t Size)
参数一:UART_HandleTypeDef *huart,串口句柄
参数二:uint8_t *pData,接收缓存首地址
参数三:uint16_t Size,接收缓存长度
返回值:HAL_StatusTypeDef,HAL状态(OK,busy,ERROR,TIMEOUT)
3. __HAL_UART_GET_FLAG
#define __HAL_UART_GET_FLAG(__HANDLE__, __FLAG__) (((__HANDLE__)->Instance->SR &
(__FLAG__)) == (__FLAG__))
参数一:HANDLE,串口句柄
参数二:FLAG,需要查看的FLAG
返回值:FLAG的值
4. __HAL_UART_CLEAR_IDLEFLAG
#define __HAL_UART_CLEAR_IDLEFLAG(__HANDLE__) __HAL_UART_CLEAR_PEFLAG(__HANDLE__)
参数一:HANDLE,串口句柄
返回值:无
5. HAL_UART_DMAStop
HAL_StatusTypeDef HAL_UART_DMAStop(UART_HandleTypeDef *huart)
参数一:UART_HandleTypeDef *huart,串口句柄
返回值:HAL_StatusTypeDef,HAL状态(OK,busy,ERROR,TIMEOUT)
6. __HAL_DMA_GET_COUNTER
#define __HAL_DMA_GET_COUNTER(__HANDLE__) ((__HANDLE__)->Instance->CNDTR)
参数一:HANDLE,串口句柄
返回值:未传输数据大小
代码实现
- 如何判断串口接收是否完成?如何知道串口收到数据的长度?
- 使用串口空闲中断(IDLE)!
- 串口空闲时,触发空闲中断;
- 空闲中断标志位由硬件置1,软件清零
- 利用串口空闲中断,可以用如下流程实现DMA控制的任意长数据接收:
- 使能 IDLE 空闲中断;
- 使能 DMA 接收中断;
- 收到串口接收中断,DMA 不断传输数据到缓冲区;
- 一帧数据接收完毕,串口暂时空闲,触发串口空闲中断;
- 在中断服务函数中,清除中断标志位,关闭DMA传输(防止干扰);
- 计算刚才收到了多少个字节的数据。
- 处理缓冲区数据,开启DMA传输,开始下一帧接收。
- 代码(20.dma_test3/MDK-ARM)
- 有三个文件需要修改:
- main.c
uint8_t rcvBuf[BUF_SIZE]; // 接收数据缓存数组
uint8_t rcvLen = 0; // 接收一帧数据的长度
__HAL_UART_ENABLE_IT(&huart1, UART_IT_IDLE); // 使能IDLE空闲中断
HAL_UART_Receive_DMA(&huart1,rcvBuf,100); // 使能DMA接收中断
while (1)
{HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_8);HAL_Delay(300);
}
- main.h
#define BUF_SIZE 100
- stm32f1xx_it.c
extern uint8_t rcvBuf[BUF_SIZE];
extern uint8_t rcvLen;
void USART1_IRQHandler(void)
{/* USER CODE BEGIN USART1_IRQn 0 *//* USER CODE END USART1_IRQn 0 */HAL_UART_IRQHandler(&huart1);/* USER CODE BEGIN USART1_IRQn 1 */if(__HAL_UART_GET_FLAG(&huart1,UART_FLAG_IDLE) == SET) // 判断IDLE标志位是否被置位{__HAL_UART_CLEAR_IDLEFLAG(&huart1);// 清除标志位HAL_UART_DMAStop(&huart1); // 停止DMA传输,防止干扰uint8_t temp=__HAL_DMA_GET_COUNTER(&hdma_usart1_rx); rcvLen = BUF_SIZE - temp; //计算数据长度HAL_UART_Transmit_DMA(&huart1, rcvBuf, rcvLen);//发送数据HAL_UART_Receive_DMA(&huart1, rcvBuf, BUF_SIZE);//开启DMA}/* USER CODE END USART1_IRQn 1 */
}

相关文章:
STM32F103C8T6第5天:独立看门狗、窗口看门狗、dma实验
1. 独立看门狗IWDG介绍(341.45) 什么是看门狗? 在由单片机构成的微型计算机系统中,由于单片机的工作常常会受到来自外界电磁场的干扰,造成程序的跑飞,而陷入死循环,程序的正常运行被打断&#…...
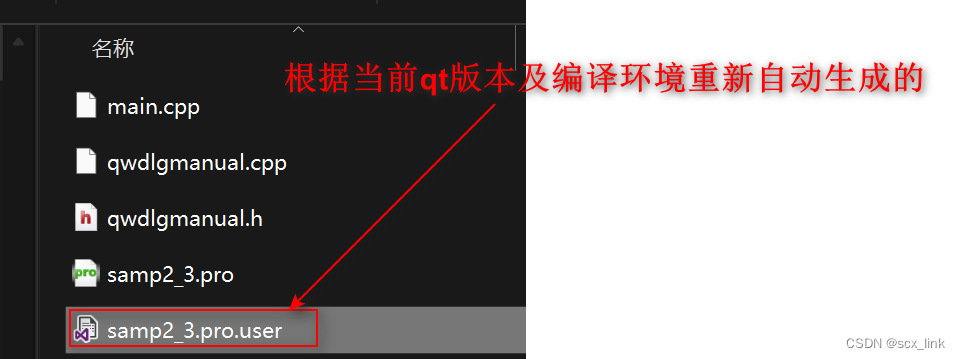
QT已有项目导入工程时注意事项
文章目录 从qt其他版本上开发的工程导入另一qt版本时 从qt其他版本上开发的工程导入另一qt版本时 这里以之前在qt5.12.2上开发的项目为例,现在到在qt6.5.3上运行。 不能直接导入IDE上,否则会报各种莫名奇妙的错误。 首先要把扩展名位.pro.user文件 删掉…...

Django视图层
一、请求与响应 视图函数 视图函数,简称视图,属于Django的视图层,默认定义在views.py文件中,是用来处理web请求信息以及返回响应信息的函数,所以研究视图函数只需熟练掌握两个对象即可:请求对象(HttpRequ…...
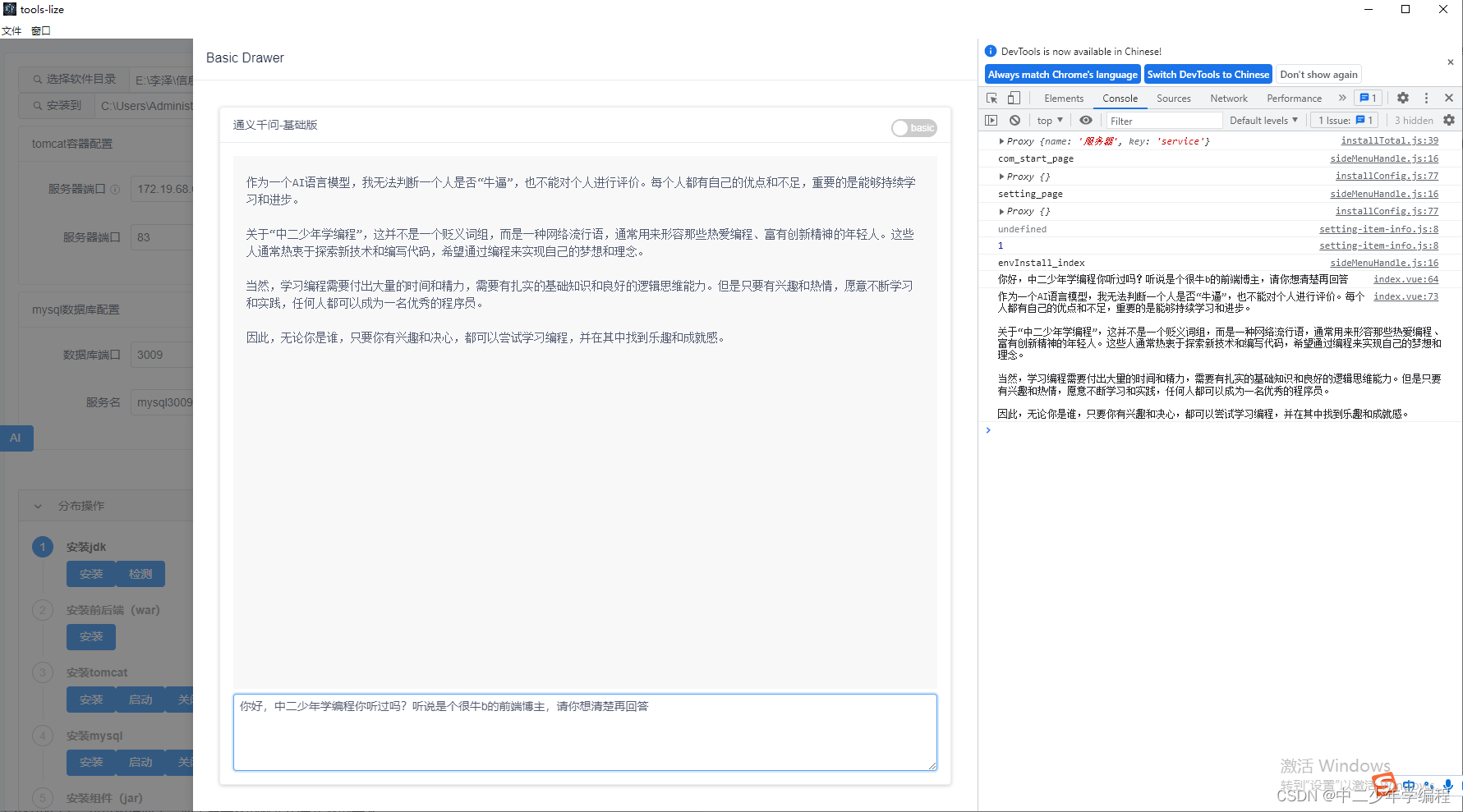
我在electron中集成了自己的ai大模型
同学们可以私信我加入学习群! 正文开始 前言一、大模型选择二、获取key三、调用api四、调用ai模型api时,解决跨域总结 前言 最近单位把gpt、文心一言、通义千问、星火等等等等你能想到的ai大模型都给禁掉了,简直丧心病狂。 不知道有多少感同…...

oracle rac环境归档日志清除
文章目录 一、处理步骤1、使用终端登录上服务器查看磁盘使用状态2、使用恢复备份管理工具RMAN删除归档日志 二、详细操作步骤三、定时任务自动清归档日志1、编写删除脚本4、测试脚本运行情况5、设置定时任务每周执行一次,并测试运行效果 昨天单位的所有系统都连不上…...
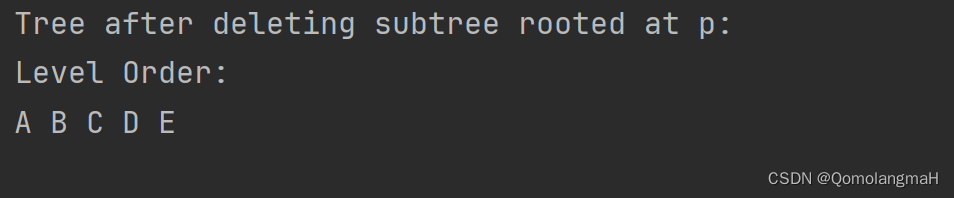
【数据结构】树与二叉树(廿六):树删除指定结点及其子树(算法DS)
文章目录 5.3.1 树的存储结构5. 左儿子右兄弟链接结构 5.3.2 获取结点的算法1. 获取大儿子、大兄弟结点2. 搜索给定结点的父亲3. 搜索指定数据域的结点4. 删除结点及其左右子树a. 逻辑删除与物理删除b. 算法DSTc. 算法解析d. 代码实现递归释放树算法DS e. 算法测试 5. 代码整合…...

交叉编译 和 软硬链接 的初识(面试重点)
目录 交叉编译的初认识Q&A Q1: 编译是什么? Q2: 交叉编译是什么? Q3: 为什么要交叉编译 Q3.1:树莓派相对于C51大得多,可以集成编译器比如gcc,那么树莓派就不需要交叉编译了吗? Q4: 什么是宿主机和…...

Docker attach 命令
docker attach:连接到正在运行中的容器。 语法 docker attach [OPTIONS] CONTAINER要attach上去的容器必须正在运行,可以同时连接上同一个container来共享屏幕(与screen命令的attach类似)。 官方文档中说attach后可以通过CTRL-…...
Keil5个性化设置及常用快捷键
Keil5个性化设置及常用快捷键 1.概述 这篇文章是Keil工具介绍的第三篇文章,主要介绍下Keil5优化配置,以及工作中常用的快捷键提高开发效率。 第一篇:《安装嵌入式单片机开发环境Keil5MDK以及整合C51开发环境》https://blog.csdn.net/m0_380…...
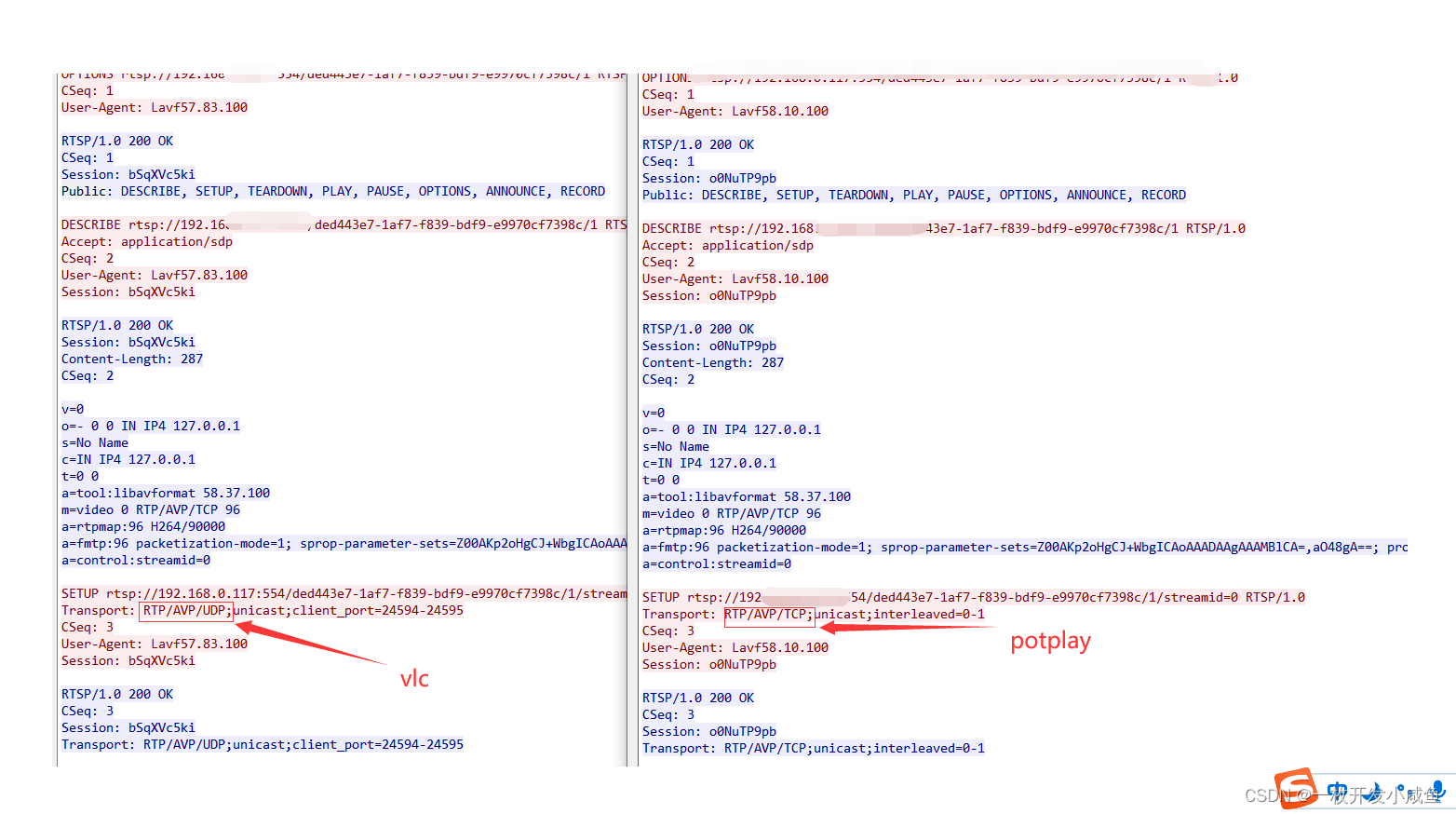
rtsp点播异常出现‘circluar_buffer_size‘ option was set but it is xx
先说现象: 我使用potplay播放器来点播rtsp码流的时候可以点播成功,同事使用vlc和FFplay来点播rtsp码流的时候异常。 排查思路: 1.开始怀疑是oss账号问题,因为ts切片数据是保存在oss中的,我使用的是自己的oss账号,同事使用的是公司…...

C++ Qt QString用法详解与代码演示
作者:令狐掌门 技术交流QQ群:675120140 csdn博客:https://mingshiqiang.blog.csdn.net/ 文章目录 创建和初始化长度和容量修改字符串字符串比较查找和提取数值转换arg格式化`arg` 的基本用法精确控制占位符多占位符的复杂替换使用大括号占位符注意事项迭代Unicode 和编码QSt…...

安全攻击及防范手册
目录 1 概述 1.1 简介 1.2 参考资料 2 安全隐患及预防措施 <...
Visual Studio 使用MFC 单文档工程绘制单一颜色直线和绘制渐变颜色的直线(实例分析)
Visual Studio 使用MFC 单文档工程从创建到实现绘制单一颜色直线和绘制渐变颜色的直线 本文主要从零开始创建一个MFC单文档工程然后逐步实现添加按键(事件响应函数),最后实现单一颜色直线的绘制与渐变色直线的绘制o( ̄▽࿾…...

一起学docker系列之八使用 Docker 安装配置 MySQL
目录 前言步骤 1:拉取 MySQL 镜像步骤 2:运行 MySQL 容器步骤 3:检查容器状态步骤 4:进入 MySQL 容器步骤 5:配置 MySQL 字符编码步骤 6:重启 MySQL 容器步骤 7:测试字符编码步骤 8:…...

4G执法记录仪在大型安保集团,保安集团、蓝天救援队中的 应用,行为规范化,人员定位,考勤打卡,应急指挥调度
【智能化升级】揭秘4G/5G执法记录仪在安保与救援领域如何重塑行业标准与效率 在快速发展的社会当中,大型安保集团、保安集团和蓝天救援队所肩负的任务日益繁重与复杂。无论是在平时的治安巡查、安保执勤,还是在突发公共事件的应急响应中,如何…...

分布式事务,一致性理论, 两阶段提交(2PC), 三阶段提交(3PC),Seata分布式事务方案
文章目录 分布式事务:1、一致性理论2、两阶段提交(2PC)3、三阶段提交(3PC)4、Seata分布式事务方案 上一篇降到了 分布式锁,先来和大家聊一聊分布式事务, 分布式锁的链接如下: http…...
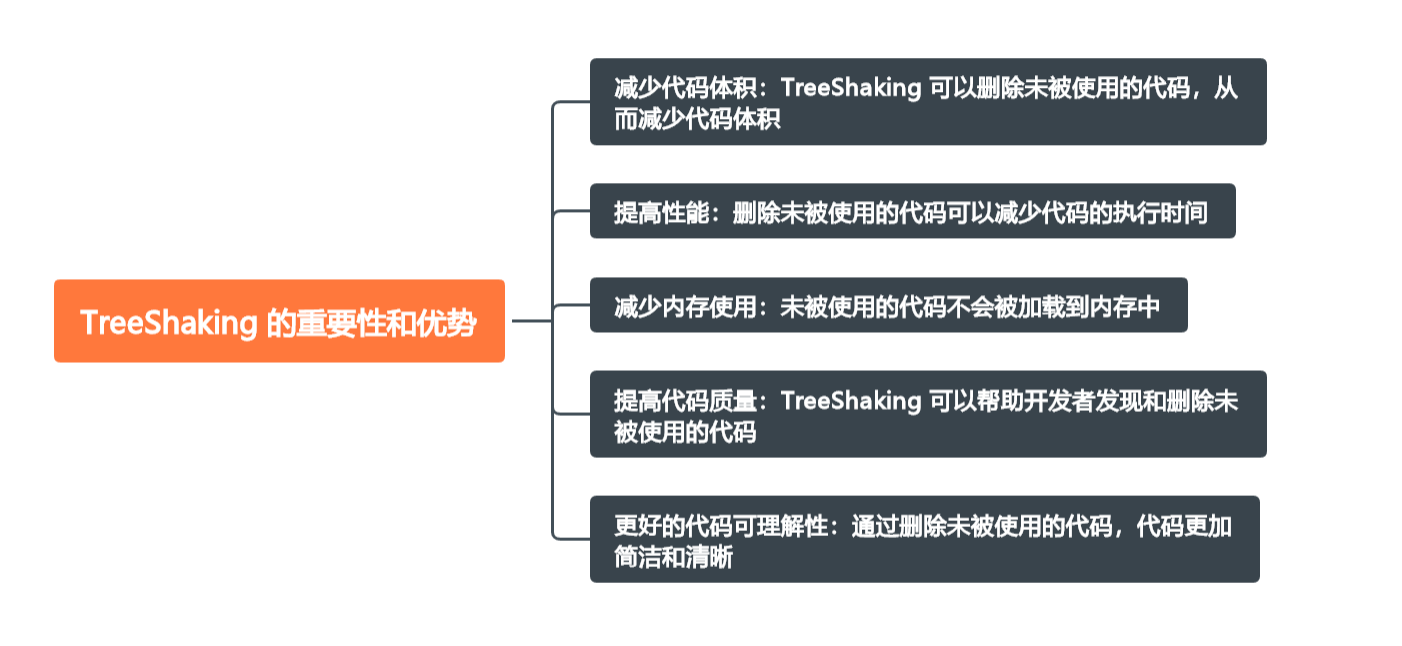
摆脱无用代码的负担:TreeShaking 的魔力
🤍 前端开发工程师(主业)、技术博主(副业)、已过CET6 🍨 阿珊和她的猫_CSDN个人主页 🕠 牛客高级专题作者、在牛客打造高质量专栏《前端面试必备》 🍚 蓝桥云课签约作者、已在蓝桥云…...
)
A-莲子的软件工程学【算法必会题目】(JavaPythonC++实现)
文章目录 A-莲子的软件工程学题目背景解题思路Python题解代码Java题解代码C++题解代码代码OJ评判结果代码讲解Python 代码解释:Java 代码解释:C++ 代码解释:寄语A-莲子的软件工程学 题目背景 在宇宙射线的轰击下,莲子电脑里的一些她自己预定义的函数被损坏了。 对于一名…...
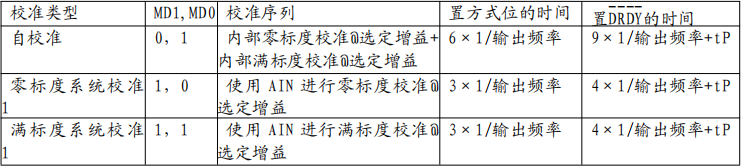
STM32-SPI1控制AD7705(Sigma-Delta-ADC芯片)
STM32-SPI1控制AD7705(Sigma-Delta-ADC芯片) 原理图手册说明功能方框图引脚功能 片内寄存器通信寄存器(RS2、RS1、RS00、0、0)设置寄存器时钟寄存器数据寄存器(RS2、RS1、RS00、1、1)测试寄存器(…...

13年老鸟总结,性能测试方法汇总+性能响应很慢排查方法(详全)
目录:导读 前言一、Python编程入门到精通二、接口自动化项目实战三、Web自动化项目实战四、App自动化项目实战五、一线大厂简历六、测试开发DevOps体系七、常用自动化测试工具八、JMeter性能测试九、总结(尾部小惊喜) 前言 1、性能测试包含哪…...

Java工程师转行大模型:高薪+广阔前景,你的优势远超想象!
本文分析了大模型领域的发展前景和Java工程师转行的优势。大模型在多个领域应用广泛,需求旺盛,技术迭代快,薪资待遇高。Java工程师具备扎实的编程基础、工程化能力、分布式系统经验等优势,转行大模型领域具备良好条件。文章建议补…...

基于STM32与VS1053的智能音乐播放器设计与实现
1. 项目背景与核心功能 每次在地铁上看到有人用复古MP3听歌,我都会想起学生时代攒钱买的第一台音乐播放器。如今虽然手机听歌很方便,但自己动手做一个能解码多种格式的智能音乐播放器,依然是电子爱好者心中的"白月光"。这次我们要用…...
)
ESP32-S3 WROOM N16R8 CAM开发板+OV2640摄像头,保姆级避坑配置指南(附完整引脚定义)
ESP32-S3 WROOM N16R8 CAM开发板OV2640摄像头实战配置指南 刚拿到ESP32-S3 WROOM N16R8 CAM开发板和OV2640摄像头的开发者,往往会在配置阶段遇到各种"坑"。本文将带你从零开始,一步步完成开发环境的搭建、硬件连接、代码配置,直到成…...

第一阶段:Java入门基础
第一阶段:Java入门基础 | ⭐ Java简介与发展历史 - 手把手教学指南 📅 更新时间:2026年4月15日 🎯 学习阶段:第一阶段:Java入门基础 ⏱️ 建议用时:1天 📌 阶段目标:掌握…...
——做一个能上线的 AI 应用,最小技术栈到底需要哪些东西)
大模型应用开发实战(6)——做一个能上线的 AI 应用,最小技术栈到底需要哪些东西
🤵♂️ 个人主页:小李同学_LSH的主页 ✍🏻 作者简介:LLM学习者 🐋 希望大家多多支持,我们一起进步!😄 如果文章对你有帮助的话, 欢迎评论 💬点赞Ǵ…...

ENSP模拟器外网访问全攻略:从环境搭建到成功ping通8.8.8.8
ENSP模拟器外网访问实战指南:从零搭建到稳定连通 网络工程师和IT技术人员经常需要在隔离环境中测试网络设备的连通性,华为ENSP模拟器提供了完美的解决方案。但让模拟器中的设备访问真实外网却是一个充满技术细节的过程。本文将带你一步步突破虚拟与现实的…...

流程图应该怎么画?一篇从入门到实践的完整指南
在软件开发、产品设计、业务分析中,流程图是一种非常重要的表达工具。无论是梳理逻辑、设计系统,还是做技术文档,流程图都能让复杂问题变得清晰直观。这篇文章将从 基础概念 → 标准符号 → 绘制步骤 → 实战示例 → 工具推荐,手把…...
 - 霍尔编码器HallSensor.cpp与HallSensor.h,背后的状态机—6个扇区是怎么驱动 FOC 的?)
SimpleFOC源码学习08(v2.3.2) - 霍尔编码器HallSensor.cpp与HallSensor.h,背后的状态机—6个扇区是怎么驱动 FOC 的?
导言github 源码: https://github.com/simplefoc/Arduino-FOC/blob/v2.3.2/src/sensors/HallSensor.hhttps://github.com/simplefoc/Arduino-FOC/blob/v2.3.2/src/sensors/HallSensor.cpp 在第 8 篇分析了增量式编码器 Encoder 之后,这篇来看另一类在 BL…...

Umi-CUT:三分钟掌握批量图片去黑边的终极解决方案
Umi-CUT:三分钟掌握批量图片去黑边的终极解决方案 【免费下载链接】Umi-CUT 项目地址: https://gitcode.com/gh_mirrors/um/Umi-CUT 在数字内容创作和日常工作中,处理大量图片的黑边、尺寸调整和压缩任务常常耗费大量时间。Umi-CUT是一款开源的批…...

CefFlashBrowser:在2026年重温Flash经典的终极解决方案
CefFlashBrowser:在2026年重温Flash经典的终极解决方案 【免费下载链接】CefFlashBrowser Flash浏览器 / Flash Browser 项目地址: https://gitcode.com/gh_mirrors/ce/CefFlashBrowser CefFlashBrowser 是一款专为Flash内容设计的开源浏览器工具,…...