yolov8-pose 推理流程
目录
一、关键点预测
二、图像预处理
二、推理
三、后处理与可视化
3.1、后处理
3.2、特征点可视化
四、完整pytorch代码
yolov8-pose tensorrt
一、关键点预测
注:本篇只是阐述推理流程,tensorrt实现后续跟进。
yolov8-pose的tensorrt部署代码稍后更新,还是在仓库:GitHub - FeiYull/TensorRT-Alpha: 🔥🔥🔥TensorRT-Alpha supports YOLOv8、YOLOv7、YOLOv6、YOLOv5、YOLOv4、v3、YOLOX、YOLOR...🚀🚀🚀CUDA IS ALL YOU NEED.🍎🍎🍎It also supports end2end CUDA C acceleration and multi-batch inference.
也可以关注:TensorRT系列教程-CSDN博客
以下是官方预测代码:
from ultralytics import YOLO
model = YOLO(model='yolov8n-pose.pt')
model.predict(source="d:/Data/1.jpg", save=True)推理过程无非是:图像预处理 -> 推理 -> 后处理 + 可视化,这三个关键步骤在文件大概247行:D:\CodePython\ultralytics\ultralytics\engine\predictor.py,代码如下:
# Preprocess
with profilers[0]:im = self.preprocess(im0s) # 图像预处理# Inference
with profilers[1]:preds = self.inference(im, *args, **kwargs) # 推理# Postprocess
with profilers[2]:self.results = self.postprocess(preds, im, im0s) # 后处理二、图像预处理
通过debug,进入上述self.preprocess函数,看到代码实现如下。处理流程大概是:padding(满足矩形推理),图像通道转换,即:BGR装RGB,检查图像数据是否连续,存储顺序有HWC转为CHW,然后归一化。需要注意,原始pytorch框架图像预处理的时候,会将图像缩放+padding为HxW的图像,其中H、W为32倍数,而导出tensorrt的时候,为了高效推理,H、W 固定为640x640。
def preprocess(self, im):"""Prepares input image before inference.Args:im (torch.Tensor | List(np.ndarray)): BCHW for tensor, [(HWC) x B] for list."""not_tensor = not isinstance(im, torch.Tensor)if not_tensor:im = np.stack(self.pre_transform(im))im = im[..., ::-1].transpose((0, 3, 1, 2)) # BGR to RGB, BHWC to BCHW, (n, 3, h, w)im = np.ascontiguousarray(im) # contiguousim = torch.from_numpy(im)img = im.to(self.device)img = img.half() if self.model.fp16 else img.float() # uint8 to fp16/32if not_tensor:img /= 255 # 0 - 255 to 0.0 - 1.0return img二、推理
图像预处理之后,直接推理就行了,这里是基于pytorch推理。
def inference(self, im, *args, **kwargs):visualize = increment_path(self.save_dir / Path(self.batch[0][0]).stem,mkdir=True) if self.args.visualize and (not self.source_type.tensor) else Falsereturn self.model(im, augment=self.args.augment, visualize=visualize)三、后处理与可视化
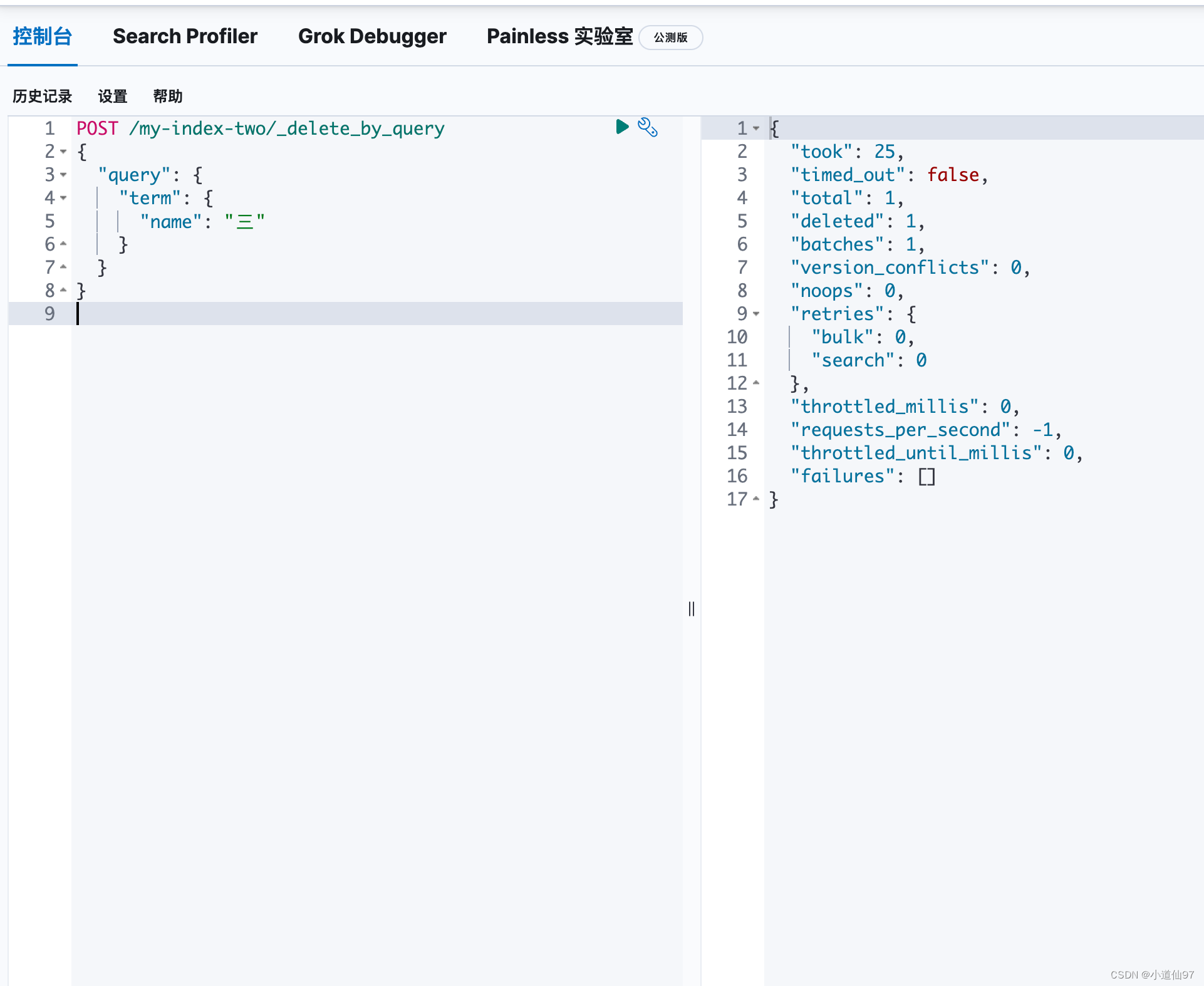
3.1、后处理
网络推理输出特征图维度为:56x8400,其中:
- 8400表示候选目标数量,
- 56 = xywhc + points * 17,points的长度为3,分别为:xyc,即:特征点的坐标和置信度
尽管推理输出特征图中,每一行既有bbox,还有keypoints,但是NMS的时候,依然只作用于bbox,下面代码作了NMS之后,将筛选之后的目标中bbox、keypoints进行坐标值缩放(缩放到原图尺寸坐标系)。
def postprocess(self, preds, img, orig_imgs):"""Return detection results for a given input image or list of images."""preds = ops.non_max_suppression(preds,self.args.conf,self.args.iou,agnostic=self.args.agnostic_nms,max_det=self.args.max_det,classes=self.args.classes,nc=len(self.model.names))results = []for i, pred in enumerate(preds):orig_img = orig_imgs[i] if isinstance(orig_imgs, list) else orig_imgsshape = orig_img.shapepred[:, :4] = ops.scale_boxes(img.shape[2:], pred[:, :4], shape).round()pred_kpts = pred[:, 6:].view(len(pred), *self.model.kpt_shape) if len(pred) else pred[:, 6:]pred_kpts = ops.scale_coords(img.shape[2:], pred_kpts, shape)path = self.batch[0]img_path = path[i] if isinstance(path, list) else pathresults.append(Results(orig_img=orig_img,path=img_path,names=self.model.names,boxes=pred[:, :6],keypoints=pred_kpts))return results3.2、特征点可视化
bbox可视化没什么好说的,说下17个特征点的可视化,在文件:D:\CodePython\ultralytics_fire_smoke\ultralytics\utils\plotting.py171行,绘制特征点需要注意,需要按照预定义的顺序绘制,其中特征点置信度需要足够大。
def kpts(self, kpts, shape=(640, 640), radius=5, kpt_line=True):"""Plot keypoints on the image.Args:kpts (tensor): Predicted keypoints with shape [17, 3]. Each keypoint has (x, y, confidence).shape (tuple): Image shape as a tuple (h, w), where h is the height and w is the width.radius (int, optional): Radius of the drawn keypoints. Default is 5.kpt_line (bool, optional): If True, the function will draw lines connecting keypointsfor human pose. Default is True.Note: `kpt_line=True` currently only supports human pose plotting."""if self.pil:# Convert to numpy firstself.im = np.asarray(self.im).copy()nkpt, ndim = kpts.shapeis_pose = nkpt == 17 and ndim == 3kpt_line &= is_pose # `kpt_line=True` for now only supports human pose plotting# 绘制特征点for i, k in enumerate(kpts):color_k = [int(x) for x in self.kpt_color[i]] if is_pose else colors(i)x_coord, y_coord = k[0], k[1]if x_coord % shape[1] != 0 and y_coord % shape[0] != 0:if len(k) == 3:conf = k[2]if conf < 0.5:continuecv2.circle(self.im, (int(x_coord), int(y_coord)), radius, color_k, -1, lineType=cv2.LINE_AA)# 绘制线段if kpt_line:ndim = kpts.shape[-1]for i, sk in enumerate(self.skeleton):pos1 = (int(kpts[(sk[0] - 1), 0]), int(kpts[(sk[0] - 1), 1]))pos2 = (int(kpts[(sk[1] - 1), 0]), int(kpts[(sk[1] - 1), 1]))if ndim == 3:conf1 = kpts[(sk[0] - 1), 2]conf2 = kpts[(sk[1] - 1), 2]if conf1 < 0.5 or conf2 < 0.5:continueif pos1[0] % shape[1] == 0 or pos1[1] % shape[0] == 0 or pos1[0] < 0 or pos1[1] < 0:continueif pos2[0] % shape[1] == 0 or pos2[1] % shape[0] == 0 or pos2[0] < 0 or pos2[1] < 0:continuecv2.line(self.im, pos1, pos2, [int(x) for x in self.limb_color[i]], thickness=2, lineType=cv2.LINE_AA)if self.pil:# Convert im back to PIL and update drawself.fromarray(self.im)这里给一张特征点顺序图:

四、完整pytorch代码
将以上流程合并起来,并加以修改,完整代码如下:
import torch
import cv2 as cv
import numpy as np
from ultralytics.data.augment import LetterBox
from ultralytics.utils import ops
from ultralytics.engine.results import Results
import copy# path = 'd:/Data/1.jpg'
path = 'd:/Data/6406402.jpg'
device = 'cuda:0'
conf = 0.25
iou = 0.7# preprocess
im = cv.imread(path)
# letterbox
im = [im]
orig_imgs = copy.deepcopy(im)
im = [LetterBox([640, 640], auto=True, stride=32)(image=x) for x in im]
im = im[0][None] # im = np.stack(im)
im = im[..., ::-1].transpose((0, 3, 1, 2)) # BGR to RGB, BHWC to BCHW, (n, 3, h, w)
im = np.ascontiguousarray(im) # contiguous
im = torch.from_numpy(im)
img = im.to(device)
img = img.float()
img /= 255
# load model pt
ckpt = torch.load('yolov8n-pose.pt', map_location='cpu')
model = ckpt['model'].to(device).float() # FP32 model
model.eval()# inference
preds = model(img)
prediction = ops.non_max_suppression(preds, conf, iou, agnostic=False, max_det=300, classes=None, nc=len(model.names))results = []
for i, pred in enumerate(prediction):orig_img = orig_imgs[i] if isinstance(orig_imgs, list) else orig_imgsshape = orig_img.shapepred[:, :4] = ops.scale_boxes(img.shape[2:], pred[:, :4], shape).round()pred_kpts = pred[:, 6:].view(len(pred), *model.kpt_shape) if len(pred) else pred[:, 6:]pred_kpts = ops.scale_coords(img.shape[2:], pred_kpts, shape)img_path = pathresults.append(Results(orig_img=orig_img,path=img_path,names=model.names,boxes=pred[:, :6],keypoints=pred_kpts))# show
plot_args = {'line_width': None,'boxes': True,'conf': True, 'labels': True}
plot_args['im_gpu'] = img[0]
result = results[0]
plotted_img = result.plot(**plot_args)
cv.imshow('plotted_img', plotted_img)
cv.waitKey(0)
cv.destroyAllWindows()
print()
相关文章:
yolov8-pose 推理流程
目录 一、关键点预测 二、图像预处理 二、推理 三、后处理与可视化 3.1、后处理 3.2、特征点可视化 四、完整pytorch代码 yolov8-pose tensorrt 一、关键点预测 注:本篇只是阐述推理流程,tensorrt实现后续跟进。 yolov8-pose的tensorrt部署代码…...

笔记十七、认识React的路由插件react-router-dom和基本使用
react-router 分类 web使用 react-router-dom native使用 react-router-native anywhere(使用麻烦) react-router 安装 yarn add react-router-dom main.jsx import React from "react"; import ReactDOM from "react-dom/client"…...

CleanMyMac X4.14.5Crack最新Mac电脑清理优化最佳应用
CleanMyMac X 4.14.5是用于清理和优化Mac的最佳应用程序和强大工具。它看起来很棒而且很容易理解。该软件可以清理、保护、优化、稳定和维护您的 Mac 系统。您可以立即删除不必要的、不寻常的、无用的垃圾文件、损坏的文件垃圾,并释放大量内存空间。此外,…...

Linux shell单双引号区别
shell单双引号区别: Shell脚本中很多时候都在用单引号或双引号来框住字符串,但是他们之间是存在区别的 避免踩坑记录… 单引号 单引号中的任何字符都没有特殊含义,即一些转义字符,$ 变量引用都会无效,它只把他们当作一个单纯的…...
ES 8.x开始(docker-compose安装、kibana使用、java操作)
学习文档地址 一、Docker安装 这里使用docker-compose来安装,方便后续迁移,Elasticserach和kibina一起安装。 1、创建安装目录 configdataplugins 2、配置文件 配置文件有两个,一个是ES的配置文件,一个docker-compose的配置文件 …...

有了倾斜摄影,如何搭建一座智慧城市?
随着无人机航测、倾斜摄影等全新一代测绘信息技术方法的发展,可以迅速搜集制作精细化的城市三维模型,搭建城市地理信息基础服务架构。 近期都在重点关注的“智慧城市”究竟是什么,有什么重大作用,同时又面临着什么难关,…...

设计测试用例的具体方法总结
📑打牌 : da pai ge的个人主页 🌤️个人专栏 : da pai ge的博客专栏 ☁️白马沉河共歃誓,怒涛没城亦不悔 ☁️基于需求进行测试用例的设计 基…...
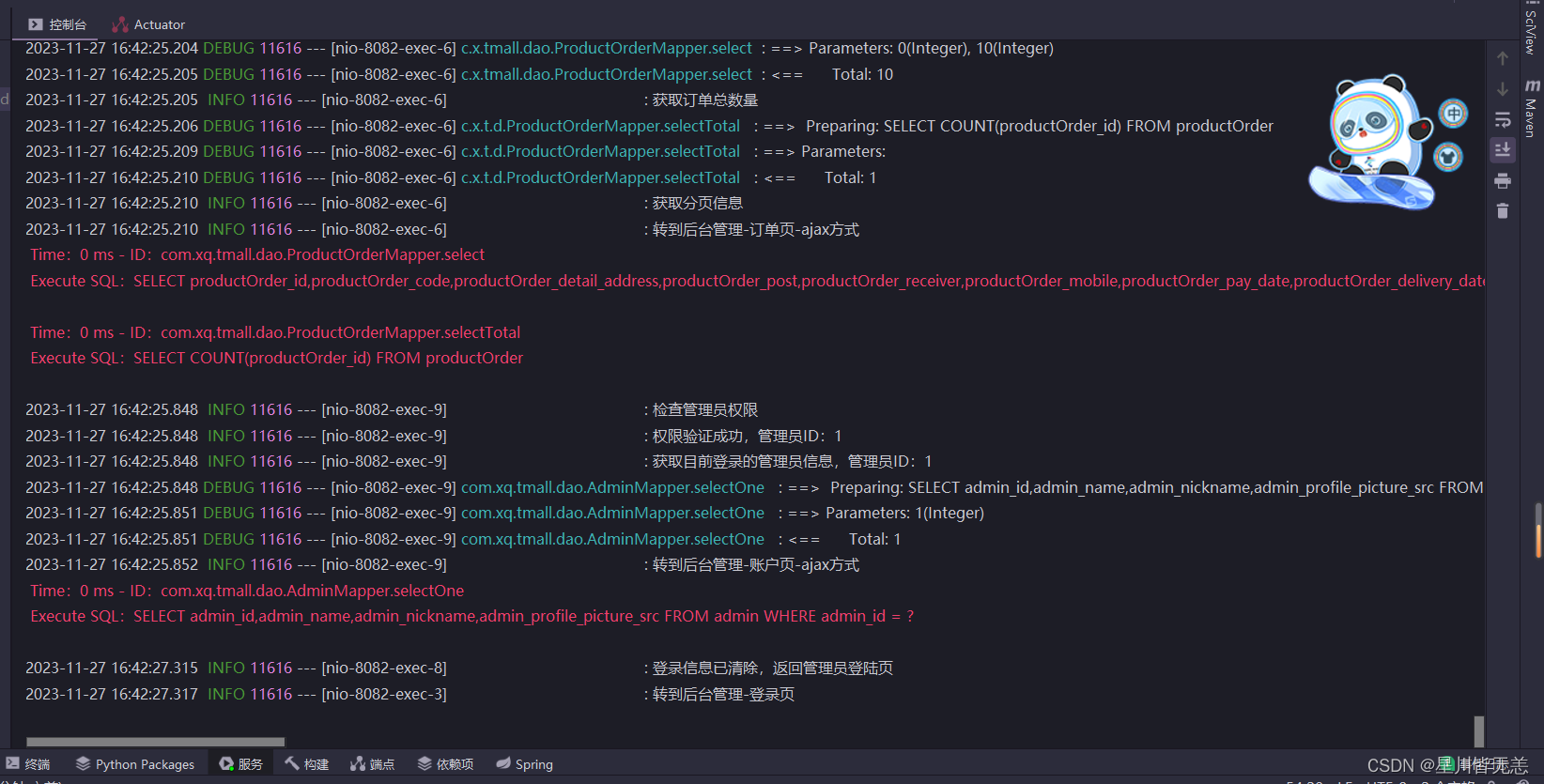
计算机毕业设计|基于SpringBoot+MyBatis框架的仿天猫商城购物系统设计与实现
计算机毕业设计|基于SpringBootMyBatis框架的仿天猫商城购物系统设计与实现 迷你仿天猫商城是一个基于SSM框架的综合性B2C电商平台,需求设计主要参考天猫商城的购物流程:用户从注册开始,到完成登录,浏览商品,加入购物…...

JAXB的XmlValue注解
XmlValue注解用在Java属性、或者方法上。它可以使得映射到XML Schema中的Java类具有一个simpleContent 或者simpleType。 一个Java类中最多只能有一个属性被XmlValue注解。 如果被XmlValue注解的JavaBean属性是Java类中唯一映射到XML的成员,那么该Java类将会被映射…...
 git仓库迁移(保留原来记录分支体系))
Git版本管理(05) git仓库迁移(保留原来记录分支体系)
说明:本文主要是一次git迁移仓库的实战记录。 1 迁移前的准备 仓库迁移前,需要将所有有必要的分支checkout到本地(想要转移到新仓库的分支就都 checkout一遍),接下来将old仓库从远程仓库克隆到本地: $git…...

科技与教育:未来教育的新趋势
在21世纪,科技的快速发展正在深刻地改变教育行业。从在线学习平台到虚拟现实教室,科技为教育带来了革命性的变化。本文将探讨科技如何影响现代教育,并预测未来教育的发展趋势。 一、科技在教育中的应用 在线学习平台:通过平台如C…...
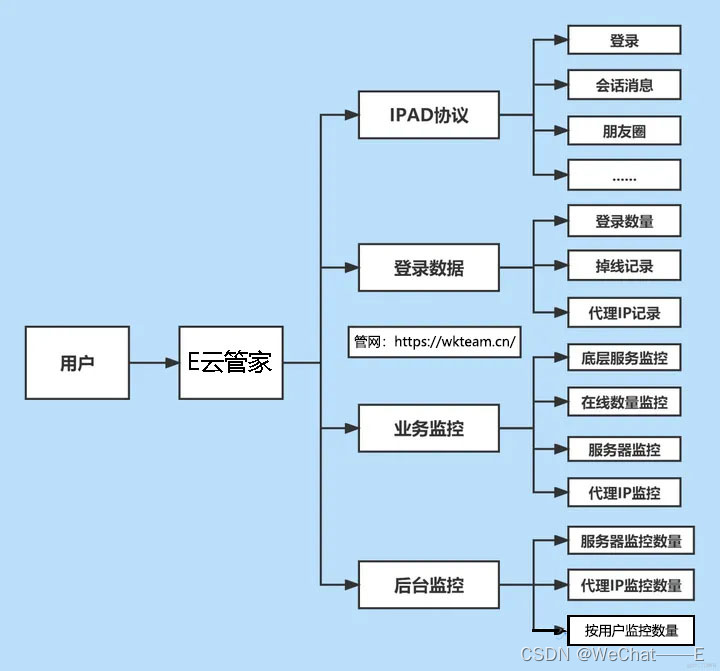
E云管家微信群聊机器人开发
请求URL: http://域名地址/modifyGroupRemark 请求方式: POST 请求头Headers: Content-Type:application/jsonAuthorization:login接口返回 参数: 参数名必选类型说明wId是String登录实例标识chatRo…...
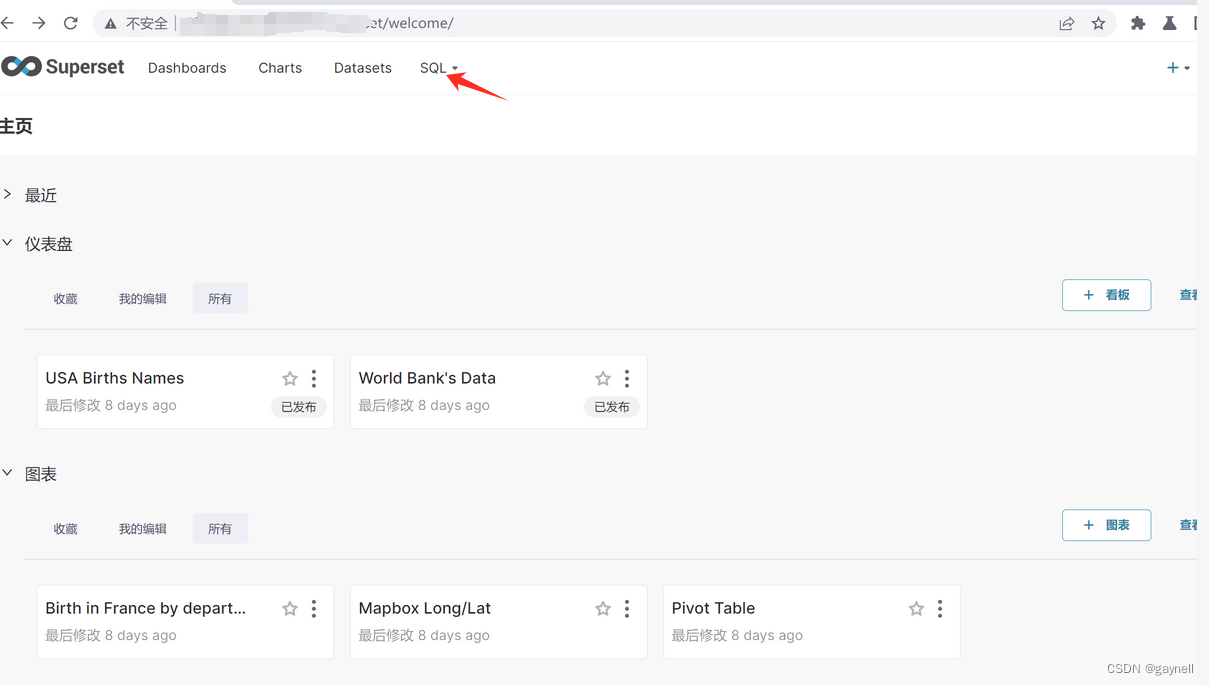
CVE-2023-27524:Apache Superset未授权访问漏洞复现
文章目录 Apache Superset 未授权访问漏洞(CVE-2023-27524)复现0x01 前言0x02 漏洞描述0x03 影响版本0x04 漏洞环境0x05 漏洞复现1.访问漏洞环境2.漏洞复现 0x06 修复建议 Apache Superset 未授权访问漏洞(CVE-2023-27524)复现 0x01 前言 免责声明:请勿利用文…...

机器学习——多元线性回归升维
机器学习升维 升维使用sklearn库实现特征升维实现天猫年度销量预测实现中国人寿保险预测 升维 定义:将原始的数据表示从低维空间映射到高维空间。在线性回归中,升维通常是通过引入额外的特征来实现的,目的是为了更好地捕捉数据的复杂性&#…...
[C/C++]用堆实现TopK算法
一:引入 思考一个问题: 怎么在100个数中找到前10个最大的数? way1: 相信大多数人想到的方法是先把100个数放到数组中从大到小排序,再打印前10个数 way2: 前一文中我们讲了堆结构,那么就可以把这100个数建为大堆,再依次pop10次 这种方法虽然再这个问题下可行,但是如果是再1亿…...
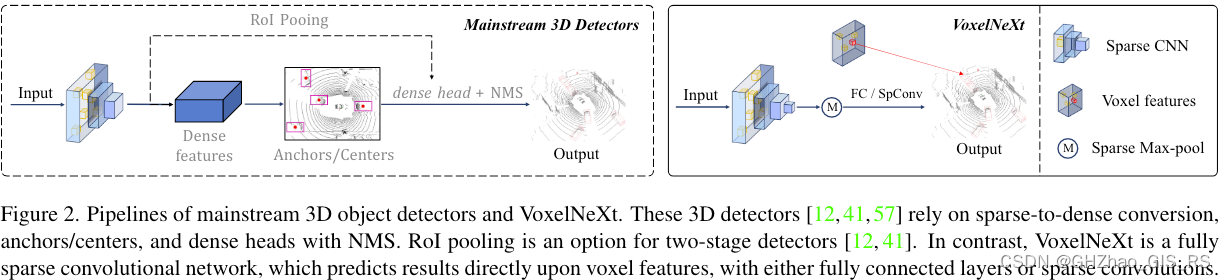
3D点云目标检测:VoxelNex解读(带源码/未完)
VoxelNext 通用vsVoxelNext一、3D稀疏卷积模块1.1、额外的两次下采样1.2、稀疏体素删减 二、高度压缩三、稀疏池化四、head五、waymo数据集训练六、训练自己的数据集bug修改 通用vsVoxelNext 一、3D稀疏卷积模块 1.1、额外的两次下采样 使用通用的3D sparse conv,…...
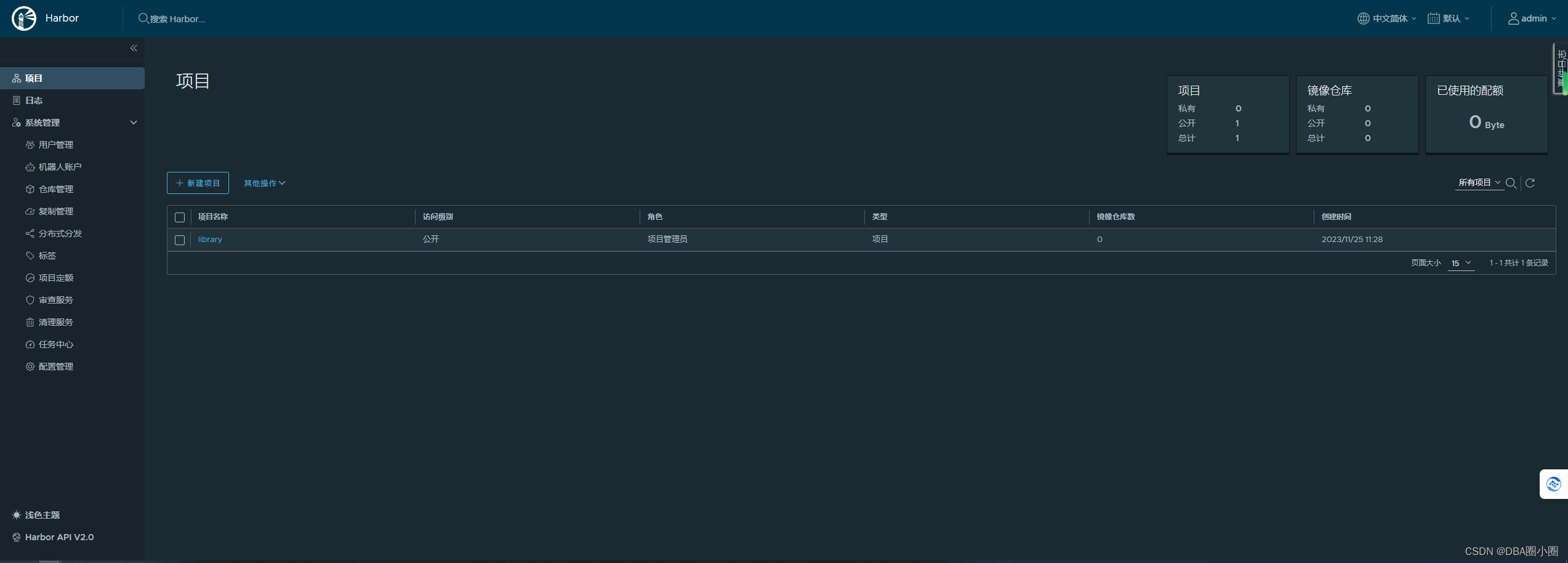
【Docker】从零开始:11.Harbor搭建企业镜像仓库
【Docker】从零开始:11.Harbor搭建企业镜像仓库 1. Harbor介绍2. 软硬件要求(1). 硬件要求(2). 软件要求 3.Harbor优势4.Harbor的误区5.Harbor的几种安装方式6.在线安装(1).安装composer(2).配置内核参数,开启路由转发(3).下载安装包并解压(4).创建并修改配置文件(5…...

使用conan包 - 工作流程
使用conan包 - 工作流程 主目录 conan Using packages1 Single configuration2 Multi configuration 本文是基于对conan官方文档Workflows的翻译而来, 更详细的信息可以去查阅conan官方文档。 This section shows how to setup your project and manage dependenci…...

【LeeCode】59.螺旋矩阵II
给定一个正整数 n,生成一个包含 1 到 n^2 所有元素,且元素按顺时针顺序螺旋排列的正方形矩阵。 示例: 输入: 3 输出: [ [ 1, 2, 3 ], [ 8, 9, 4 ], [ 7, 6, 5 ] ] 解: class Solution {public int[][] generateMatrix(int n) {int[][] ar…...
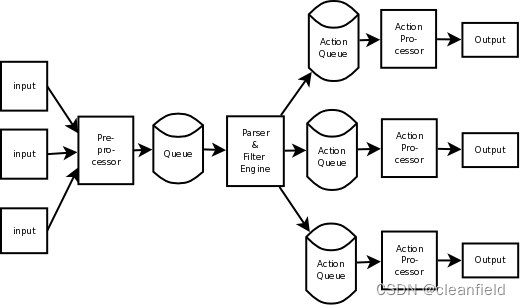
rsyslog学习
rsyslog是什么 RSYSLOG(Remote System Logging)是一个开源的日志处理工具,用于在 Linux 和 Unix 系统上收集、处理和转发日志。它是一个健壮且高性能的日志处理程序,可以替换 Syslogd 作为标准的系统日志程序。RSYSLOG 提供了许多…...

OpenClaw+gemma-3-12b-it:学术论文自动摘要与分类系统
OpenClawgemma-3-12b-it:学术论文自动摘要与分类系统 1. 为什么需要自动化论文处理 作为一名经常需要阅读大量文献的研究者,我深刻体会到手动处理论文的痛点。每周需要从arXiv、PubMed等平台下载数十篇论文,然后逐篇阅读摘要、分类归档。这…...

seL4微内核技术演进:下一代安全内核的完整发展路线图指南
seL4微内核技术演进:下一代安全内核的完整发展路线图指南 【免费下载链接】seL4 The seL4 microkernel 项目地址: https://gitcode.com/gh_mirrors/se/seL4 seL4微内核作为全球首个形式化验证的安全操作系统内核,正引领着安全关键系统的发展方向。…...

OpenClaw效率对比:Qwen2.5-VL-7B与传统OCR工具在文档处理中的表现
OpenClaw效率对比:Qwen2.5-VL-7B与传统OCR工具在文档处理中的表现 1. 测试背景与动机 最近在整理公司历史项目文档时,遇到了一个棘手的问题:大量扫描版PDF和图片格式的技术文档需要数字化处理。这些文档包含代码片段、手写注释和复杂表格&a…...

SEO_掌握这5个SEO技巧,让流量持续增长
SEO技巧:让你的网站流量持续增长的5个关键策略 在当今数字化时代,网站流量的稳定增长对于企业的成功至关重要。搜索引擎优化(SEO)是提高网站流量的核心手段之一。掌握一些关键的SEO技巧,不仅可以帮助你在搜索结果中获…...

ESP32/ESP8266旋转编码器驱动库:支持加速度响应与复合按键事件
1. 项目概述Ai Esp32 Rotary Encoder是一款专为 ESP32 和 ESP8266 平台深度优化的旋转编码器驱动库,其设计目标远超基础脉冲计数——它面向嵌入式人机交互(HMI)场景,提供带加速度响应的数值选择、边界约束、步进精度控制、循环遍历…...

网络协议封神考点:TCP协议是如何保证可靠传输的?原理+流程图+硬核详解
网络协议封神考点:TCP协议是如何保证可靠传输的?原理流程图硬核详解一、前言二、基础定义:什么是TCP可靠传输?三、TCP保证可靠传输的6大核心机制(必考)3.1 机制1:面向连接(三次握手 …...
后,这些关键参数和实物搭建要点你注意了吗?)
别再只仿真了!用Multisim/Simulink仿真直流稳压电源(BUCK电路)后,这些关键参数和实物搭建要点你注意了吗?
从仿真到实战:BUCK电路直流稳压电源的工程化实现关键 在电力电子领域,仿真软件如Multisim和Simulink已经成为工程师的标配工具,它们能快速验证电路设计的理论可行性。但当我们真正将设计转化为实物时,往往会遇到仿真中未曾预料的各…...
深入掌握 DOM 选择器与定时器:从交通灯案例到蓝桥杯 Web 考点全解 将原题目扩展成交通灯)
零基础快速入门前端蓝桥杯真题速刷2451.灯的颜色变化(助力保底拿奖不捐款)深入掌握 DOM 选择器与定时器:从交通灯案例到蓝桥杯 Web 考点全解 将原题目扩展成交通灯
2451.灯的颜色变化深入掌握 DOM 选择器与定时器:从交通灯案例到蓝桥杯 Web 考点全解在蓝桥杯 Web 方向竞赛中,DOM 操作与定时器控制是高频考点。本文以一个经典的交通灯控制案例为切入点,全面解析 document.querySelector 的 ID/Class 选择语…...

模电实战-比较器正反馈接法的窗口电压设计
1. 比较器正反馈接法的核心价值 我第一次接触比较器正反馈接法是在设计工业传感器信号调理电路时。当时遇到一个头疼的问题:环境噪声导致比较器在临界电压附近频繁误触发,整个系统像得了"癫痫"一样不停抖动。直到尝试了正反馈接法,…...

终极Limbus Company自动化助手:5大功能彻底解放你的双手
终极Limbus Company自动化助手:5大功能彻底解放你的双手 【免费下载链接】AhabAssistantLimbusCompany AALC,PC端Limbus Company小助手。AALC,Limbus Company Assistant on PC 项目地址: https://gitcode.com/gh_mirrors/ah/AhabAssistantL…...