lv11 嵌入式开发 UART实验 11
目录
1 UART帧格式详解
1.1 UART简介
1.2 通信基础 - 并行和串行
1.3 通信基础 - 单工和双工
1.4 通信基础 - 波特率
1.5 UART帧格式
2 Exynos4412下的UART控制器
2.1 引脚功能设置
2.2 阅读芯片手册
3 UART寄存器详解
3.1 引脚寄存器
3.2 串口寄存器概览
3.3 ULCONn(帧格式)
编辑 3.4 UCONn控制寄存器(串口模式轮询、中断、DMA)
3.5 状态寄存器
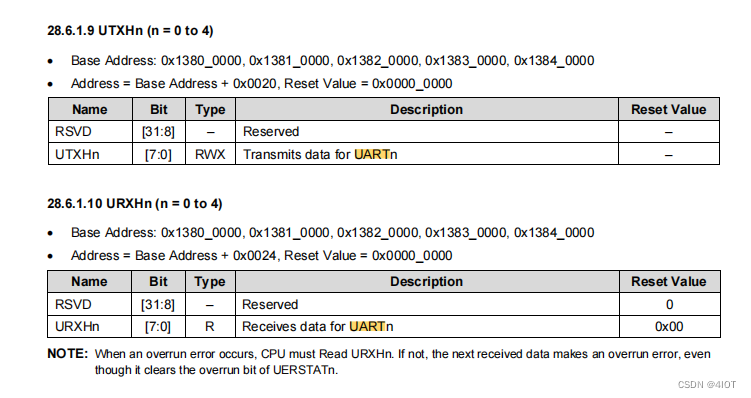
3.6 接收数据,发送数据的寄存器
3.7 设置波特率
4 UART编程
4.1 interface.c实验代码
4.2 printf重定向
4.3 练习
1 UART帧格式详解
1.1 UART简介
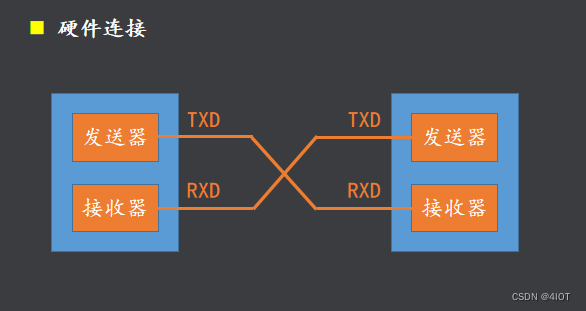
Universal Asynchronous Receiver Transmitter 即 通用异步收发器,是一种通用的串行、异步通信总线 该总线有两条数据线,可以实现全双工的发送和接收 在嵌入式系统中常用于主机与辅助设备之间的通信
1.2 通信基础 - 并行和串行
并行通讯(多个数据线一起发送)
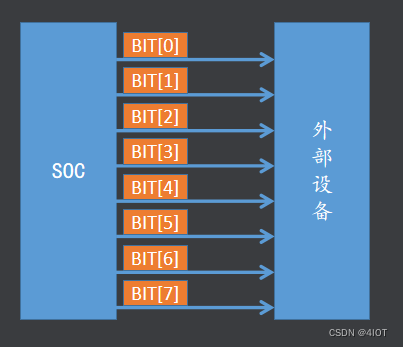
串行通信(一个个字节发送)

1.3 通信基础 - 单工和双工
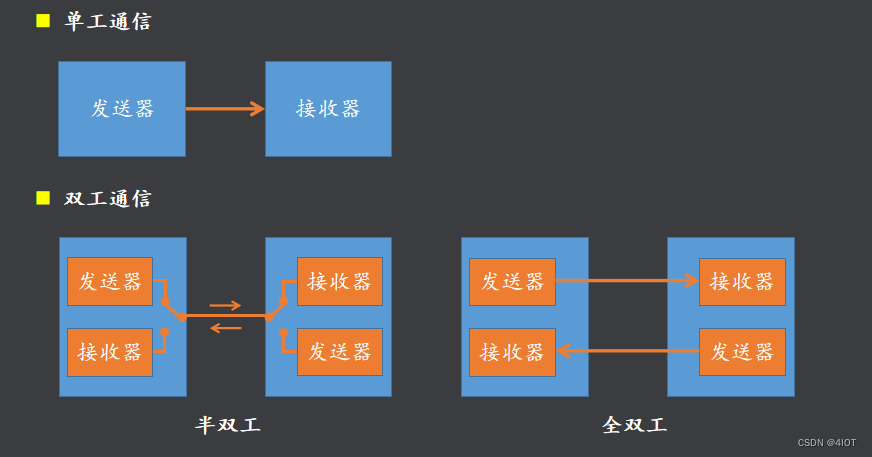
半双工要不能同时发送和接收,全双工可以同时发送和接收。
1.4 通信基础 - 波特率
波特率用于描述UART通信时的通信速度,其单位为bps(bit per second)即每秒钟传送的bit的数量
1.5 UART帧格式

串口协议中规定,先发低位再发高位
例:数据0x55 二进制01010101->发送顺序10101010
校验位很少使用,多发了一位数据,会使得通讯速度变慢
如果发送多个字节重复上面的动作,必须一个一个字节发送,附带停止位和起始位,否则发送0xFF这种数据,全是高电平,无法得知是发送了还是没发送。
串口发送的速率是根据自身的时钟速率掐时间计算。如A主机发送速率1s1个,但是接收方可能接收的数据对于A来说是0.9S1个,时间一长数据会乱。所以一般规定每次最多发8位,之后重新获取起始位,避免误差增大。
2 Exynos4412下的UART控制器
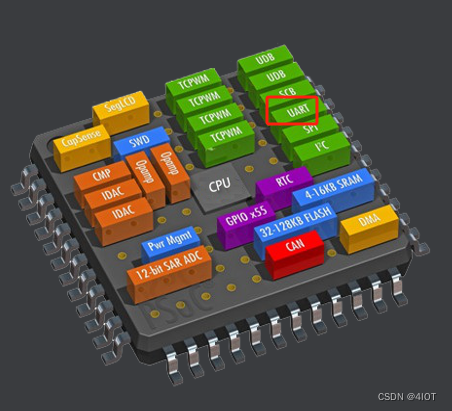
一般情况下处理器中都会集成UART控制器 我们使用UART进行通信时候只需对其内部的相 关寄存器进行设置即可
2.1 引脚功能设置
查看扩展板原理图
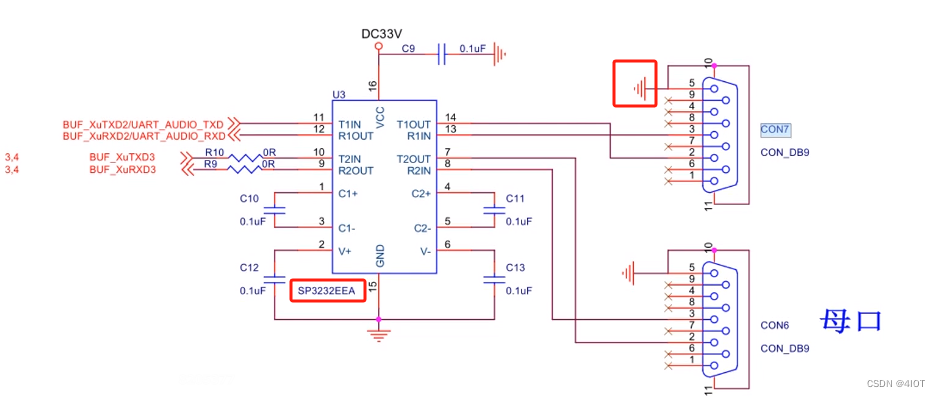
SP3232EEA芯片的作用是把串口发出来的TTL信号转换成232信号,增加了串口的通讯距离
查看核心板原理图

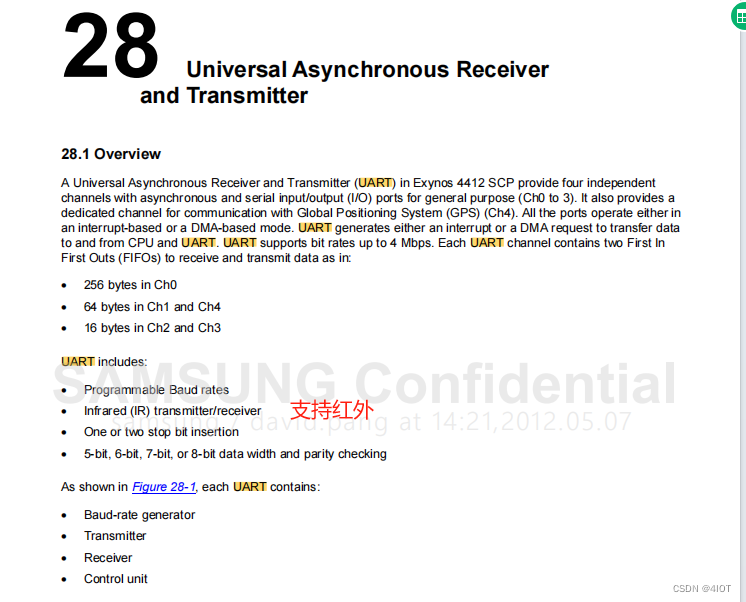
2.2 阅读芯片手册
芯片手册4412一共包含了5个串口通道,包含一个可以与GPS通讯的Ch4。串口控制器的时钟是100Mhz,支持DMA,串口中断,每个串口包含FIFO。
功能框图
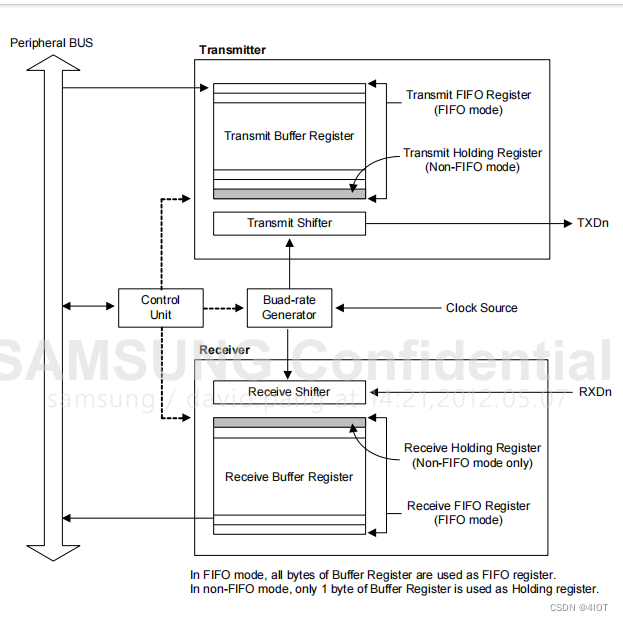
总线是CPU与串口芯片相连,发送、接收及访问控制单元。
红外GPS暂不详细介绍
3 UART寄存器详解
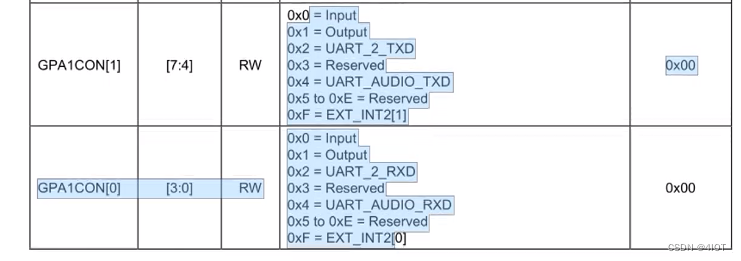
3.1 引脚寄存器
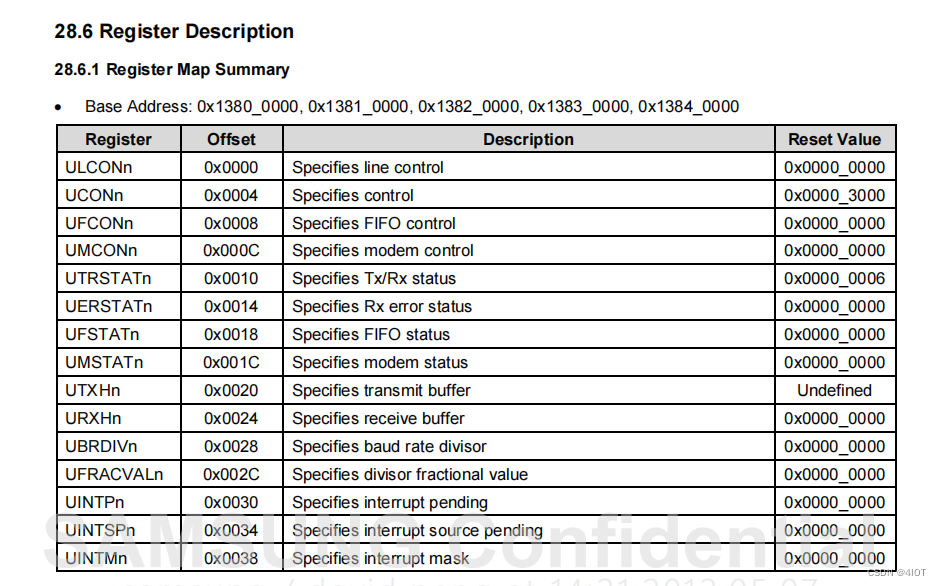
3.2 串口寄存器概览
5个串口寄存器内部是一样的,使用串口2基地址0x1382_0000
3.3 ULCONn(帧格式)
 3.4 UCONn控制寄存器(串口模式轮询、中断、DMA)
3.4 UCONn控制寄存器(串口模式轮询、中断、DMA)
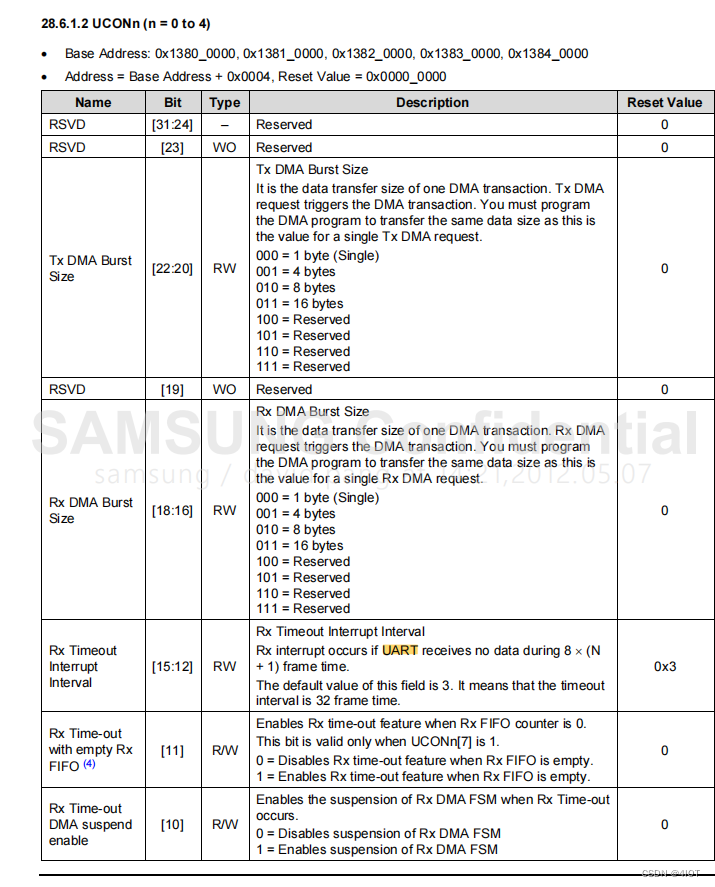
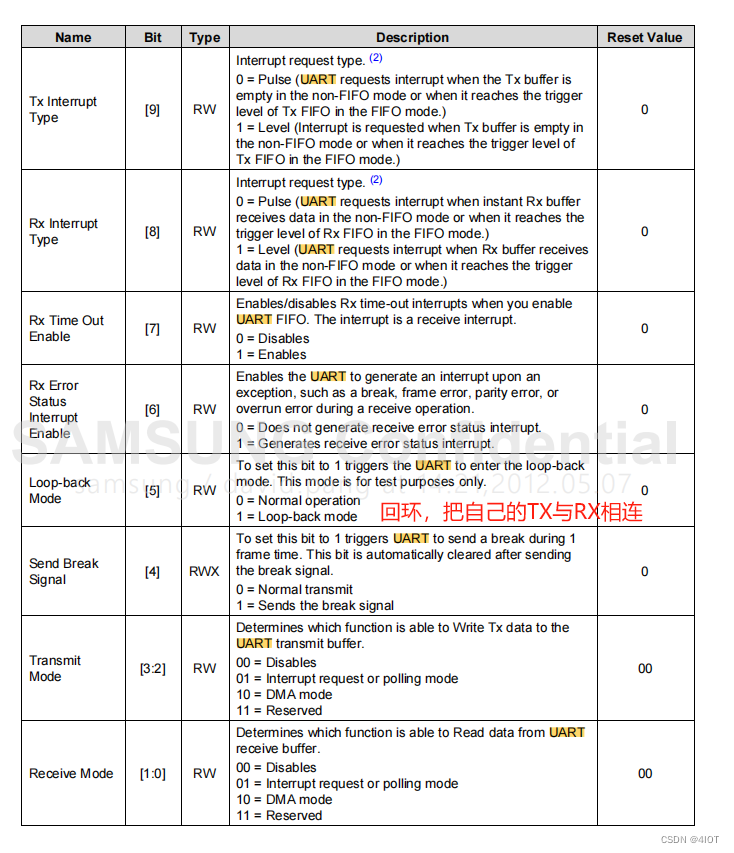
接收串口数据一般有3种方式:
1.轮询,定期CPU去访问FIFO
2.中断,有数据来了通知CPU去读取
3.DMA,有数据来了直接由DMA搬到内存中,不需要CPU去干涉
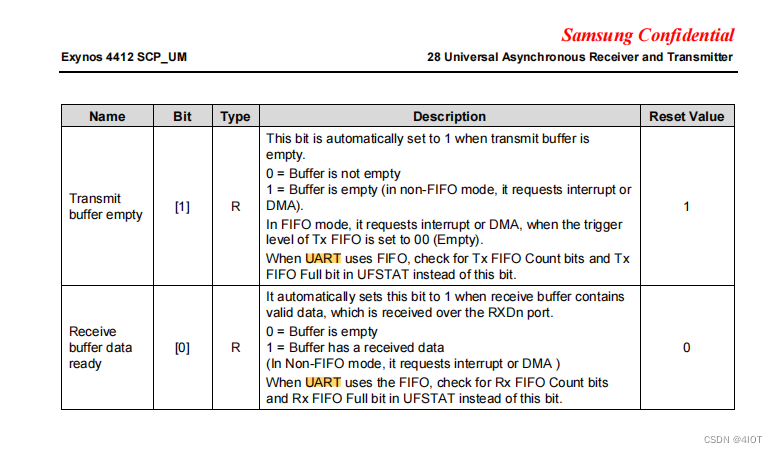
3.5 状态寄存器
 状态寄存器中一般为只读寄存器,可用于判断串口接收发送的状态
状态寄存器中一般为只读寄存器,可用于判断串口接收发送的状态
3.6 接收数据,发送数据的寄存器
3.7 设置波特率

波特率公式,案例用的时钟频率是40Mhz,我们开发板的串口时钟寄存器是100Mhz
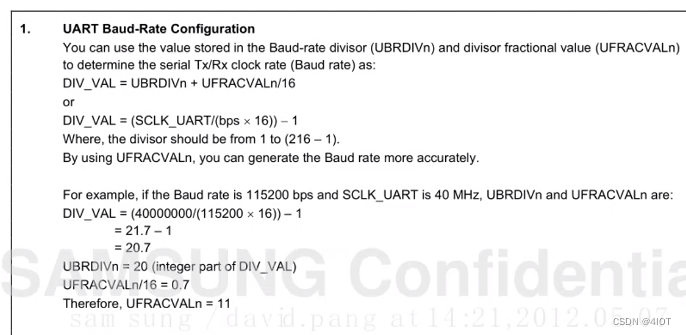
UBRDIVn = 20(整数部分)
UFRACVAL =0.7(小数部分)*16 ≈ 11(四舍五入),因为串口按位发送会校准所以可以忽略
4 UART编程
引脚寄存器
帧格式

接收和发送模式为轮询

100000000/(115200 *16)-1 ≈ 53.25
UBDIV2 = 取整 = 53
UFRAVVAL2 = 0.25 * 16 = 4
4.1 interface.c实验代码
#include "exynos_4412.h"void UART_Init(void)
{/*1.将GPA1_0和GPA1_1设置成UART2的接收和发送引脚 GPA1CON[7:0]*/GPA1.CON = GPA1.CON & (~(0xFF << 0)) | (0x22 << 0);/*2.设置UART2的帧格式 8位数据位 1位停止位 无校验 正常模式 ULCON2[6:0]*/UART2.ULCON2 = UART2.ULCON2 & (~(0x7F << 0)) | (0x3 << 0);/*3.设置UART2的接收和发送模式为轮询模式 UCON2[3:0]*/UART2.UCON2 = UART2.UCON2 & (~(0xF << 0)) | (0x5 << 0);/*4.设置UART2的波特率为115200 UBRDIV2/UFRACVAL2*/UART2.UBRDIV2 = 53;UART2.UFRACVAL2 = 4;
}void UART_Send_Byte(char Dat)
{/*等待发送寄存器为空,即上一个数据已经发送完成 UTRSTAT2[1]*/while(!(UART2.UTRSTAT2 & (1 << 1)));/*将要发送的数据写入发送寄存器 UTXH2*/UART2.UTXH2 = Dat;
}char UART_Rec_Byte(void)
{char Dat = 0;/*判断接收寄存器是否接收到了数据 UTRSTAT2[0]*/if(UART2.UTRSTAT2 & 1){/*从接收寄存器中读取接收到的数据 URXH2*/Dat = UART2.URXH2;return Dat;}else{return 0;}
}void UART_Send_Str(char * pstr)
{while(*pstr != '\0')UART_Send_Byte(*pstr++);
}int main()
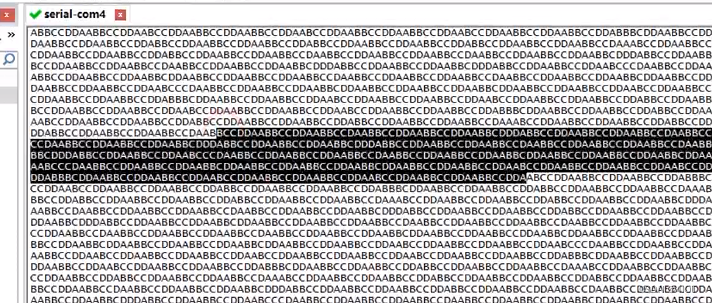
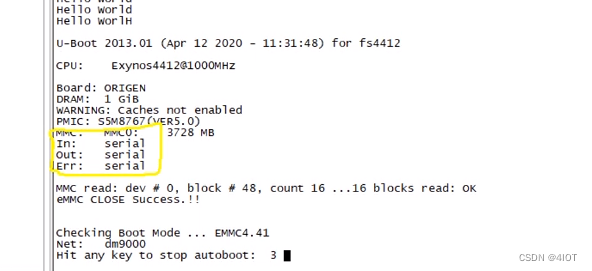
{char RecDat = 0;UART_Init();while(1){RecDat = UART_Rec_Byte();if(RecDat == 0){}else{RecDat = RecDat + 1;UART_Send_Byte(RecDat);}UART_Send_Str("Hello World\n");//重定向的printfprintf("Hello World\n");}return 0;
}
注:
寄存器只能显示字符,无法显示数字,如果需要发送和接收数字要转换为对应的字符的ASCII码
如果CPU写入的速度过快,超过串口发送器发送的速度会使得接收端的数据错乱。需要对发送状态寄存器进行判断后进行发送和接收。
4.2 printf重定向
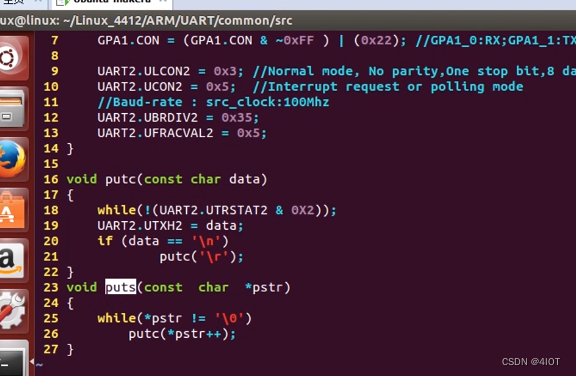
printf的功能实现已经再src中实现了,函数比较复杂,不做详细介绍
printf调用了puts,puts内部调用了putc,我们修改了putc的程序实现了重定向
定向功能在uart.c中实现。
printf的区别
1来源:没有操作系统在printf.c中,而有操作系统是调用的C库的区别
2输出定向不一样:重定向输出到串口,输出到linux终端
4.3 练习
1.若使用UART协议发送一个字节的数据0x63,画出信号线上的时序图
注:8位数据位、无校验位、一位停止位
略
2.编程实现电脑远程控制LED状态
注:在终端上输入‘2’,LED2点亮,再次输入‘2’,LED2熄灭... ...
#include "exynos_4412.h"void LED_Init(void)
{GPX2.CON = GPX2.CON & (~(0xF << 28)) | (0x1 << 28); //LED2 GPX2_7 output//GPX1.CON = GPX1.CON & (~0xF) | 0x1; //LED3 GPX1_0 output//GPF3.CON = GPF3.CON & (~(0xF << 16)) | (0x1 << 16); //LED4 GPF3_4 output//GPF3.CON = GPF3.CON & (~(0xF << 20)) | (0x1 << 20); //LED5 GPF3_5 output
}void Led_on(int num){switch(num){case 2:GPX2.DAT = GPX2.DAT | (1 << 7);case 3:GPX1.DAT = GPX1.DAT | (1 << 0);case 4:GPF3.DAT = GPF3.DAT | (1 << 4);case 5:GPF3.DAT = GPF3.DAT | (1 << 5);default:break;}}void Led_off(int num){switch(num){case 2:GPX2.DAT = GPX2.DAT & ~(1 << 7);case 3:GPX1.DAT = GPX1.DAT & ~(1 << 0);case 4:GPF3.DAT = GPF3.DAT & ~(1 << 4);case 5:GPF3.DAT = GPF3.DAT & ~(1 << 5);default:break;}}void UART_Init(void)
{/*1.将GPA1_0和GPA1_1设置成UART2的接收和发送引脚 GPA1CON[7:0]*/GPA1.CON = GPA1.CON & (~(0xFF << 0)) | (0x22 << 0);/*2.设置UART2的帧格式 8位数据位 1位停止位 无校验 正常模式 ULCON2[6:0]*/UART2.ULCON2 = UART2.ULCON2 & (~(0x7F << 0)) | (0x3 << 0);/*3.设置UART2的接收和发送模式为轮询模式 UCON2[3:0]*/UART2.UCON2 = UART2.UCON2 & (~(0xF << 0)) | (0x5 << 0);/*4.设置UART2的波特率为115200 UBRDIV2/UFRACVAL2*/UART2.UBRDIV2 = 53;UART2.UFRACVAL2 = 4;
}void UART_Send_Byte(char Dat)
{/*等待发送寄存器为空,即上一个数据已经发送完成 UTRSTAT2[1]*/while(!(UART2.UTRSTAT2 & (1 << 1)));/*将要发送的数据写入发送寄存器 UTXH2*/UART2.UTXH2 = Dat;
}char UART_Rec_Byte(void)
{char Dat = 0;/*判断接收寄存器是否接收到了数据 UTRSTAT2[0]*/if(UART2.UTRSTAT2 & 1){/*从接收寄存器中读取接收到的数据 URXH2*/Dat = UART2.URXH2;return Dat;}else{return 0;}
}void UART_Send_Str(char * pstr)
{while(*pstr != '\0')UART_Send_Byte(*pstr++);
}int main()
{char RecDat = 0;int toggle = 0;UART_Init();LED_Init();while(1){RecDat = UART_Rec_Byte();if(RecDat == '2'){if(toggle == 0){Led_on(2);toggle = 1;}else{Led_off(2);toggle = 0;}}/*UART_Send_Str("Hello World\n");*/}return 0;
}
相关文章:
lv11 嵌入式开发 UART实验 11
目录 1 UART帧格式详解 1.1 UART简介 1.2 通信基础 - 并行和串行 1.3 通信基础 - 单工和双工 1.4 通信基础 - 波特率 1.5 UART帧格式 2 Exynos4412下的UART控制器 2.1 引脚功能设置 2.2 阅读芯片手册 3 UART寄存器详解 3.1 引脚寄存器 3.2 串口寄存器概览 3.3 ULC…...

Ubuntu22.04下打包发布Qt5.15应用程序的方法
Qt应用编译时选择release方式编译 目的:debug方式编译依赖的文件会多一些,同时文件大小还会很大。 Notice: 所有操作都是在当前用户下,如果是root账户,需要注意加上sudo,否则会因为权限问题提取依赖文件失败。 准备…...

初级JVM
1、对象在哪块内存分配? 数组和对象在堆内存分配;某些对象没有逃逸出方法,可能被优化为在栈上分配 2、谈谈 JVM 中的常量池 JDK 1.8 开始 字符串常量池:存放在堆中,包括 String 对象执行 intern() 方法后存的地方、…...

MySQL数据库 编程入门
目录 MySQL数据库数据类型 MySQL数据库命令执行 创建用户 创建删除库 创建删除表 MySQL数据库数据类型 MySQL数据库定义了多种数据类型,下面是一些常见的MySQL数据类型及其对应的C/C类型: 整数类型: TINYINT:有符号范围-1…...

6.golang函数
函数是执行特定任务的代码块。函数接受输入,对输入执行一些计算,然后生成输出。 函数声明 在 go 中声明函数的语法是: func name(parameter) (result-list){//body }函数声明以func关键字开头,后跟name(函数名)。在括号中指定参…...

软件可靠性测试常见的方法
“测试”一般是指“为了发现程序中的错误而执行程序的过程”,可靠的测试性是相对重要的,在部分产品开始的测试阶段,需要的就是可靠的测试性,机构,所以存在意义较大。但是在不同的开发阶段、对于不同的人员,…...
C/C++字节对齐
C/C字节对齐 C/C字节对齐1.G_PACKED2.1 pack(push)2.2 pack(1) 全部例子 C/C字节对齐 1.G_PACKED #ifdef __GNUC__#define G_PACKED( __Declaration__ ) __Declaration__ __attribute__((packed)) #else#define G_PACKED( __Declaration__ ) __pragma( pack(push,1)) __Decla…...

【Android知识笔记】性能优化专题(四)
App 线程优化 线程调度原理 任意时刻,只有一个线程占用CPU,处于运行状态多线程并发:轮流获取CPU使用权JVM负责线程调度:按照特定机制分配CPU使用权线程调度模型 分时调度模型:轮流获取、均分CPU时间抢占式调度模型:优先级高的获取,JVM采用Android线程调度 nice值:Proc…...

DC电源模块的散热措施
BOSHIDA DC电源模块的散热措施 DC电源模块的散热措施可以分为以下几种: 1. 增加散热器:在DC电源模块的电路板上增加散热片或散热器,通过增加散热面积和散热能力来提高散热效果。 2. 增加风扇:在散热器的基础上增加风扇ÿ…...

uniapp H5、小程序、APP端自定义不同运行环境(开发、测试、生产)、自定义条件编译平台、以及动态修改manifest.json值讲解
文章目录 前言一、自定义条件编译平台是什么?二、新增自定义条件编译平台三、动态设置服务器请求地址四、动态修改manifest.json1.根目录新增文件 modifyManifest.js2.vue.config.js引入modifyManifest.js 总结示例代码 前言 企业项目开发流程上一般都要配置多个运…...
centos 显卡驱动安装(chatglm2大模型安装步骤一)
1.服务器配置 服务器系统:Centos7.9 x64 显卡:RTX3090 (24G) 2.安装环境 2.1 检查显卡驱动是否安装 输入命令:nvidia-smi(显示显卡信息) 如果有以下显示说明,已经有显卡驱动。否则需要重装。 2.2 下载显卡驱动 第一步:浏览器输入https://www.nvidia.cn/Downloa…...
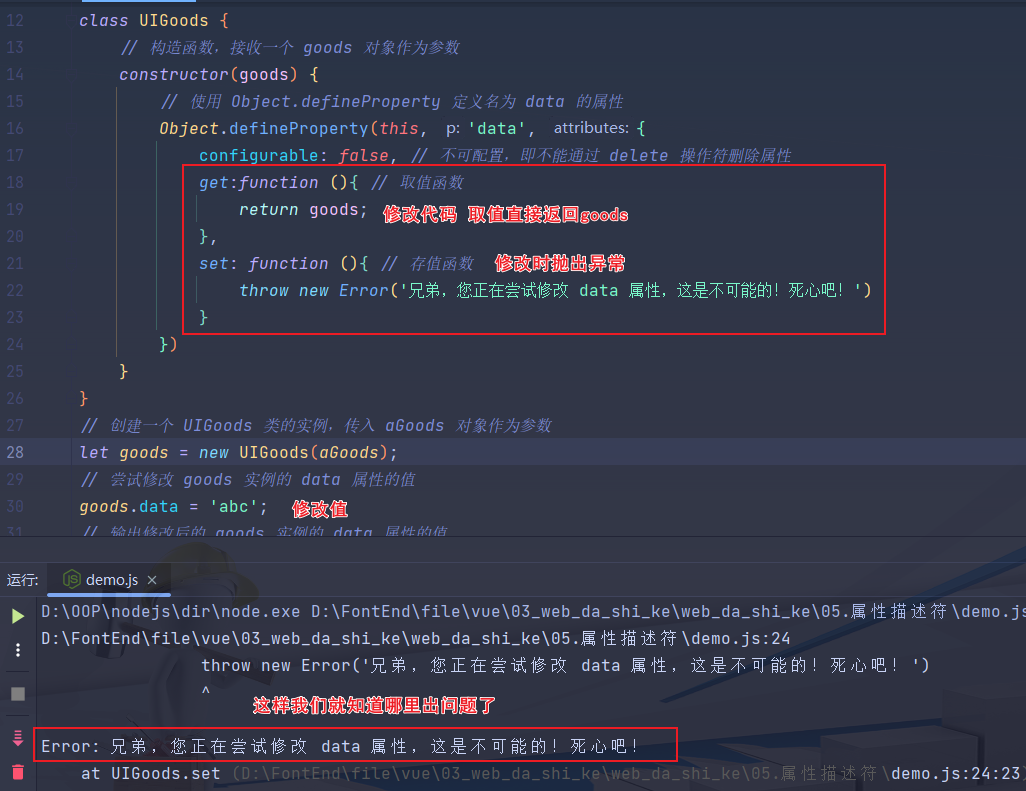
05_属性描述符
05_属性描述符 文章目录 05_属性描述符一、属性描述符是什么?二、属性描述符①:查看属性描述②:设置属性描述符③:案例01.代码实现02.代码实现(优化) 一、属性描述符是什么? 属性描述符的结构 在…...
vue day2
1、指令修饰符:.指明一些指令后缀,不同后缀封装不同处理操作 按键修饰符:keyup.enter v-model修饰符: v-model.trim:去首位空格 v-model.number:转数字 事件修饰符: 阻止事件冒泡࿱…...

四川劳动保障杂志社四川劳动保障编辑部四川劳动保障杂志2023年第10期目录
主题报道 四川抢抓“金九银十”招聘季多措并举稳就业促就业 举措频“上新” 金秋送岗忙 张玉芳; 2-5 法眼《四川劳动保障》投稿:cnqikantg126.com 筑牢长期护理保险基金安全防线 李科仲;赖晓薇; 6-7 调研 提升职业技能培训工作的举措 寇爵; 8-9 城乡…...

python数据类型
int 整型 i 1str 字符串 name1Emliy name2"你好" content""" Emily:你好! """ test你最"帅" test2"你最帅"float 浮点类型 height182.5 weight45.3bool 布尔类型 f1True f2Falselist …...
)
大数据-之LibrA数据库系统告警处理(ALM-37004 Datanode主备不同步或者断连)
告警解释 当DN主实例与DN备实例连接异常时,产生该告警。 告警属性 告警ID 告警级别 可自动清除 37004 严重 是 告警参数 参数名称 参数含义 ServiceName 产生告警的服务名称 RoleName 产生告警的角色名称 HostName 产生告警的主机名 Instance 产生…...
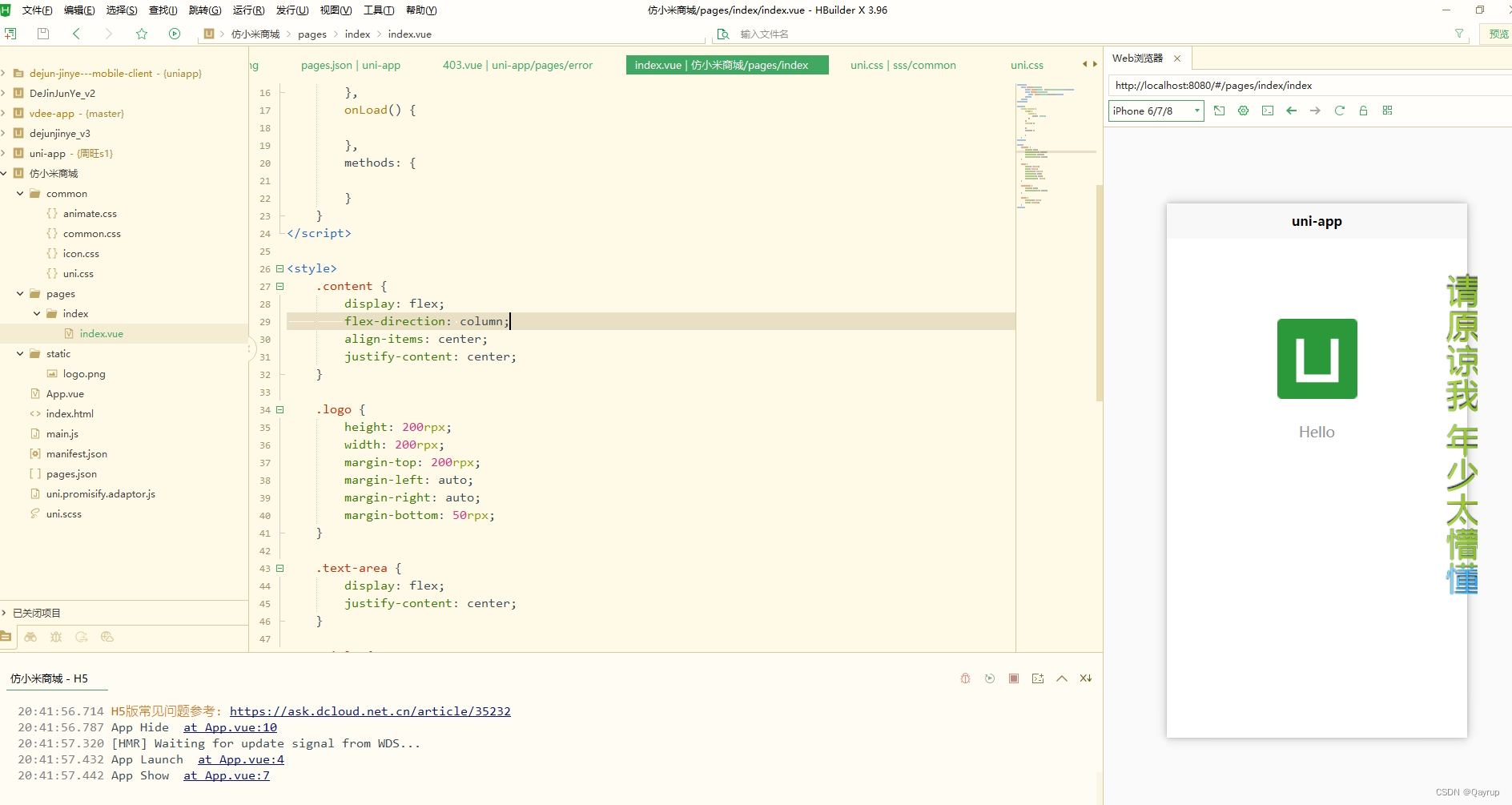
带你用uniapp从零开发一个仿小米商场_2.创建空白项目及公共样式引入
创建空白项目 打开uniapp 点击新建->项目 如下, 是编辑你项目的名字的地方是你项目存放地址,可以点击浏览器去文件管理里面选地址是模板选择,这里选择默认模板就好是一些其他选择比如uvue能让你项目在编译成软件时运行更快,unicloud能让你用js写后端,且直接就是云开发,g…...

1144. 连接格点,Kruskal算法,二维矩阵压缩为一维
有一个 m 行 n 列的点阵,相邻两点可以相连。 一条纵向的连线花费一个单位,一条横向的连线花费两个单位。 某些点之间已经有连线了,试问至少还需要花费多少个单位才能使所有的点全部连通。 输入格式 第一行输入两个正整数 m 和 n。 以下若…...

C++ : 友元(未完结)
不能从外部访问类的私有数据成员和方法,但这条规则不适用于友元类和友元函数。要声明友元 类或友元函数,可使用关键字 friend,通过让函数成为类的友元,可以赋予该函数与类的成员函数 同的访问权限。 生活中你的家有客厅 (Public)…...

Nginx 服务器 SSL 证书安装部署
操作场景 本文档以证书名称 menglinfeng.top 为例。 Nginx 版本以 nginx/1.18.0 为例。 当前服务器的操作系统为 CentOS 7,由于操作系统的版本不同,详细操作步骤略有区别。 安装 SSL 证书前,请您在 Nginx 服务器上开启 “443” 端口…...
)
5个实战案例解析:如何用VLA模型让机器人听懂人话并执行任务(附开源项目推荐)
5个实战案例解析:如何用VLA模型让机器人听懂人话并执行任务(附开源项目推荐) 当机器人能像人类助手一样理解"把茶几上的遥控器拿过来"这样的日常指令时,具身智能才真正开始改变我们的生活。视觉-语言-动作(V…...

Linux系统调用原理与性能优化实践
1. Linux系统调用基础概念在Linux系统中,系统调用是用户空间程序与内核交互的唯一合法途径。作为操作系统最基础的接口,它就像一扇严格管控的大门,既保护了内核的安全稳定,又为应用程序提供了必要的服务支持。为什么需要这种隔离机…...

GeoIP2-CN项目的用户调研结果:需求分析与功能规划
GeoIP2-CN项目的用户调研结果:需求分析与功能规划 项目背景与调研目标 GeoIP2-CN项目作为一款小巧精悍、准确、实用的GeoIP2数据库,旨在解决传统GeoIP2数据库在中国大陆用户使用中存在的痛点。本次用户调研通过收集代理工具用户的实际使用反馈…...

Paper2Slides自定义样式:从学术风格到动漫主题的完整教程
Paper2Slides自定义样式:从学术风格到动漫主题的完整教程 【免费下载链接】Paper2Slides "Paper2Slides: From Paper to Presentation in One Click" 项目地址: https://gitcode.com/gh_mirrors/pap/Paper2Slides 想要快速将学术论文转化为精美的演…...

【C++第二十三章】C++11
前言 🚀C11 常被称为现代 C 的起点。它不是一次零碎的小修小补,而是一次真正改变编程方式的大版本更新:从统一初始化,到 auto / decltype 的类型推导;从右值引用、移动语义,到完美转发;再到 lam…...

JavaScript金融计算中的精度陷阱与decimal.js实战指南
1. 为什么金融计算需要decimal.js? 如果你在JavaScript中执行过0.1 0.2这样的计算,可能会惊讶地发现结果不是0.3,而是0.30000000000000004。这种精度问题在金融系统中简直是灾难——想象一下银行系统因为这种误差少算了一分钱,或…...

新手必学!3个OpenClaw基础Skill快速上手,5分钟搞定实操任务
新手必学!3个OpenClaw基础Skill快速上手,5分钟搞定实操任务在前两篇内容里,我们先是吃透了OpenClaw Skill的核心概念,又完成了全平台的环境部署、Skill安装加载与必装技能配置,理论和准备工作都已经到位。很多新手安装…...

ai一键生成node.js环境配置教程,快马平台助你跳过繁琐安装步骤
最近在学习Node.js开发时,发现环境配置这个入门步骤对新手来说确实有点麻烦。不同操作系统下的安装方式差异大,版本选择也让人纠结。好在发现了InsCode(快马)平台的AI辅助开发功能,可以自动生成完整的配置教程,分享下我的使用体验…...

MouseClick:解放双手的跨平台鼠标自动化神器,告别重复点击的烦恼
MouseClick:解放双手的跨平台鼠标自动化神器,告别重复点击的烦恼 【免费下载链接】MouseClick 🖱️ MouseClick 🖱️ 是一款功能强大的鼠标连点器和管理工具,采用 QT Widget 开发 ,具备跨平台兼容性 。软件…...

企业级游戏对话系统架构解析:Yarn Spinner如何实现高性能对话引擎
企业级游戏对话系统架构解析:Yarn Spinner如何实现高性能对话引擎 【免费下载链接】YarnSpinner The core compiler and engine-agnostic components for Yarn Spinner, the friendly dialogue tool. 项目地址: https://gitcode.com/gh_mirrors/ya/YarnSpinner …...