【古月居《ros入门21讲》学习笔记】07_创建工作空间和功能包
目录
说明:
1. 工作空间(workspace) 结构:
2. 创建工作空间和功能包
创建工作空间
编译工作空间
创建功能包
设置环境变量
3. 注意
同一个工作空间下,不能存在同名的功能包;
不同工作空间下,可以存在同名的功能包。
说明:
1. 本系列学习笔记基于B站:古月居《ROS入门21讲》课程,且使用的Ubuntu与ROS系统版本与 课程完全一致;
| 虚拟机版本 | Linux系统版本 | ROS系统版本 |
|---|---|---|
| VMware WorkStation Pro 16 | Ubuntu18.04 | Melodic |
2. 本节是整个笔记的第7节,对应视频课程的第9节,请自行对应学习;
3. 整个系列笔记基本已经完结,但部分章节仍需润色修改 ,后面会陆续发布,请大家持续关注, 创作不易,感谢支持!
1. 工作空间(workspace) 结构:
存放工程开发相关文件的文件夹,包含以下4个主要文件夹:
1. src: 代码空间(Source Space),
用来放置功能包所有源码、配置文件、launch文件等;
2. build: 编译空间(Build Space),
用来放置编译过程中所产生的一些中间文件(二进制文件),基本用不到,不用操作;
3. devel: 开发空间(Development Space),
用来放置开发过程中编译生成的一些可执行文件、库、脚本,所以以后可能会查看里面的一些内容;
4. install:安装空间(Install Space),
通过install命令安装成功的一些东西,最终开发编译生成的可执行文件,都是在Install这个空间里;
(注意:devel 开发空间和 install 安装空间的功能类似,内容有一定程度的重复,install是开发完成后分享给客户使用的结果文件,但在ROS2里,对这一点做了修正,只保留了install 空间)
2. 创建工作空间和功能包
创建工作空间
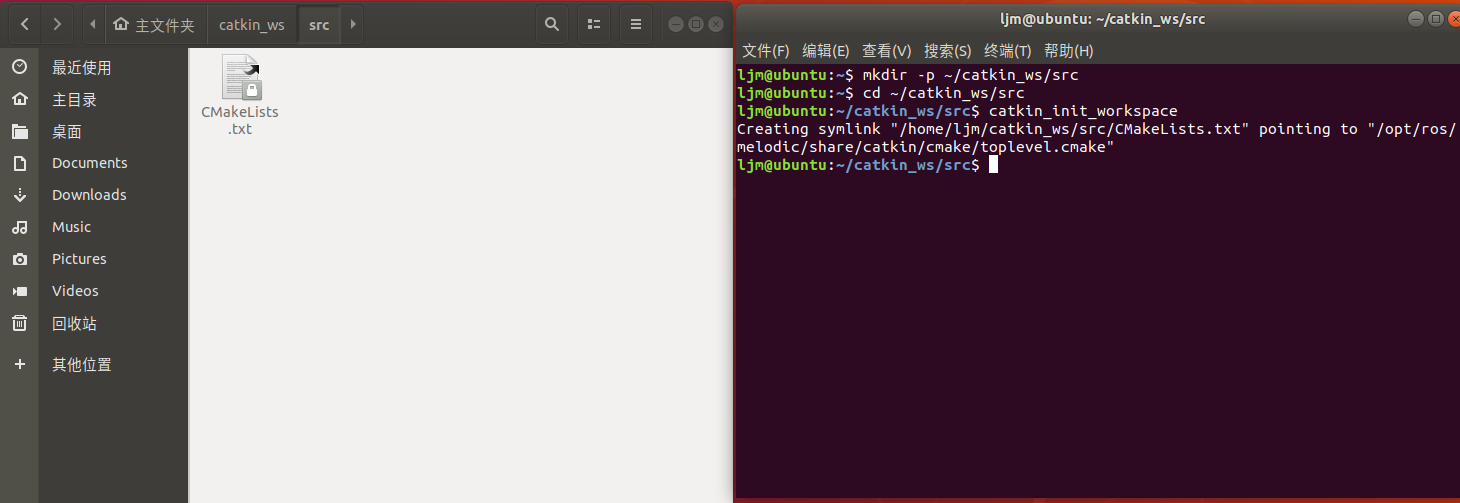
mkdir -p ~/catkin_ws/src cd ~/catkin_ws/src catkin_init_workspace
-
-p:创建一个多级目录,若其父目录不存在,则系统会自动创建,而不是报错,比如,mkdir -p /home/a/b/c,如果没有a和b文件夹或者没有b文件夹,系统则会自动创建,并在b文件夹下创建c文件夹。
-
~:代表用户的home目录。
第(1)步:mkdir -p ~/catkin_ws/src,创建一个工作空间,
第(2)步: cd ~/catkin_ws/src, 切换到创建工作空间的src文件夹下,
第(3)步:catkin_init_workspace, 初始化当前文件夹,将创建的工作空间变成一个具有ROS属性的workspace,
这是一个属性的变化,然后会在catkin_ws/src下产生一个CMakeLists.txt文件,
代表初始化成功。
编译工作空间
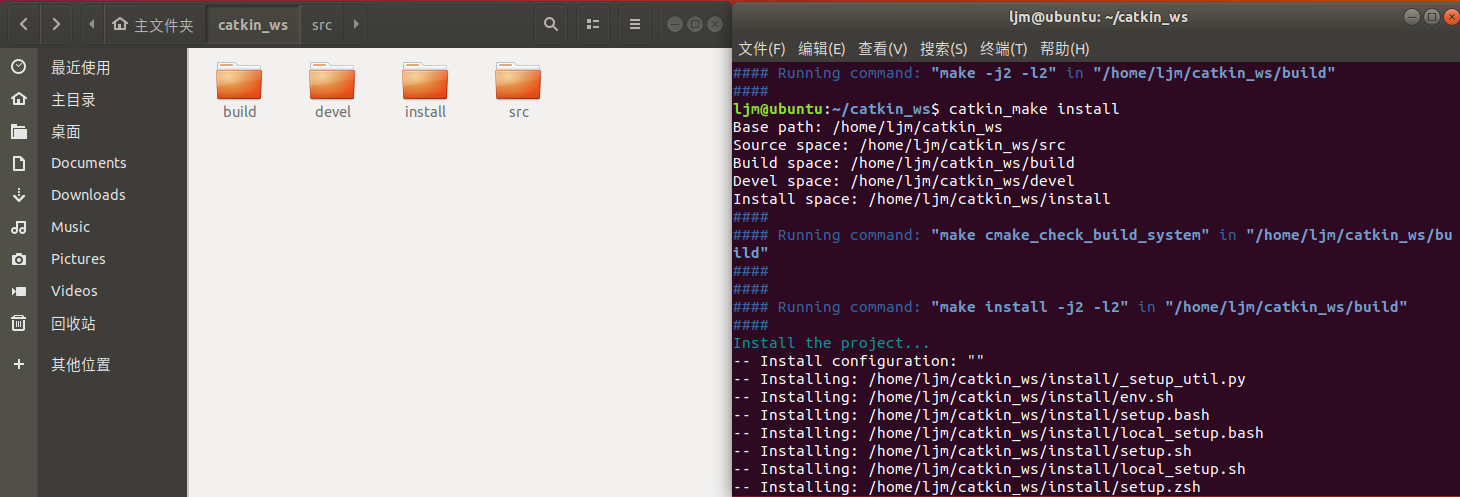
cd ~/catkin_ws catkin_make catkin_make install
第(1)步:cd ~/catkin_ws, 先切换到catkin_ws功能空间根目录下,
第(2)步:catkin_make , 会在catkin_ws目录下生成,devel开发空间和build编译空间的文件夹,
第(3)步:catkin_make intsall, 产生install安装空间的文件;
-
注意:第二步catkin_make之后并不会在catkin_ws目录下生成Install安装空间的文件夹,install安装空间的文件夹需要再输入,catkin_make intsall命令
创建功能包
ROS里源码不可以直接放在工作空间下的src文件夹中直接编译,必须要创建功能包,因此功能包是ROS里源码的最小单元,
存放路径:home/catkin_ws/src
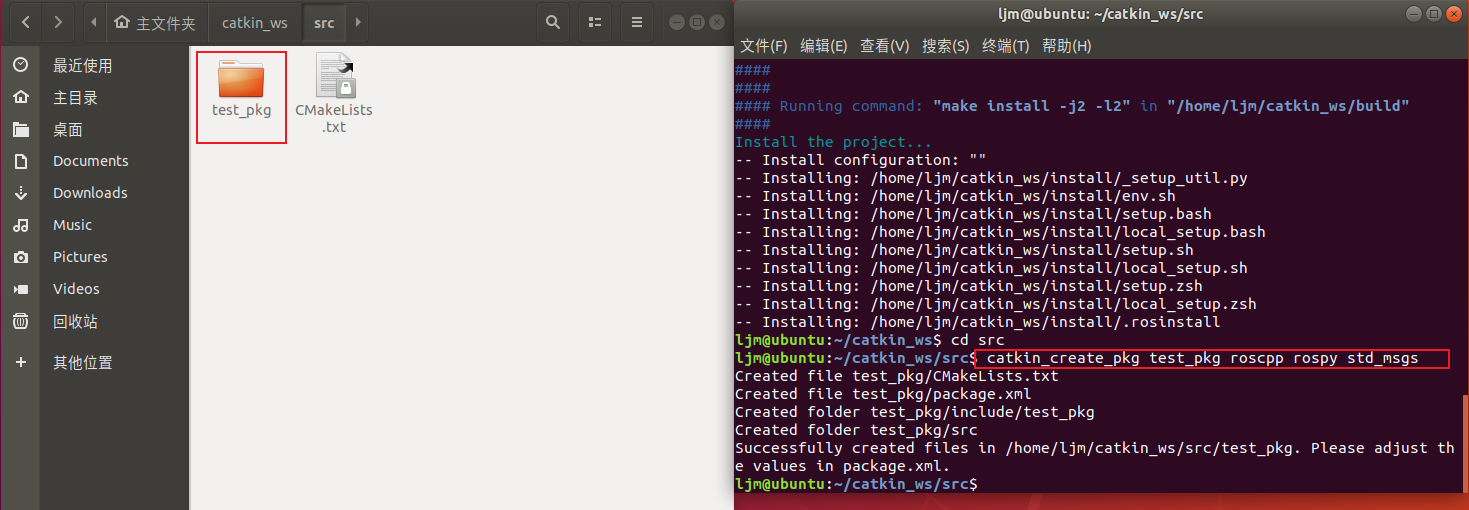
cd ~/catkin_ws/src catkin_create_pkg package_name 依赖1 依赖2 依赖3 cd ~/catkin_ws catkin_make
示例:
第(1)步:cd ~/catkin_ws/src, 先切换工作路径到catkin_ws/src目录下,
第(2)步:catkin_create_pkg test_pkg roscpp rospy std_msgs, 创建catkin_ws工作空间下的功能包,
创建功能包命令说明: rospy: 调用python的依赖库,
roscpp: 调用c++的依赖库
std_msgs: 调用ros定义的一些标准的消息结构的依赖
根据自己创建的功能包需要的用到哪些库,后面就跟哪些依赖,且数量不止可以调用3个,
顺序不分先后,
第(3)步:cd ~/catkin_ws, 再切换到catkin_ws功能空间根目录下,
第(4)步:catkin_make, 编译功能包
打开我们创建的test_pkg功能包文件夹如下:
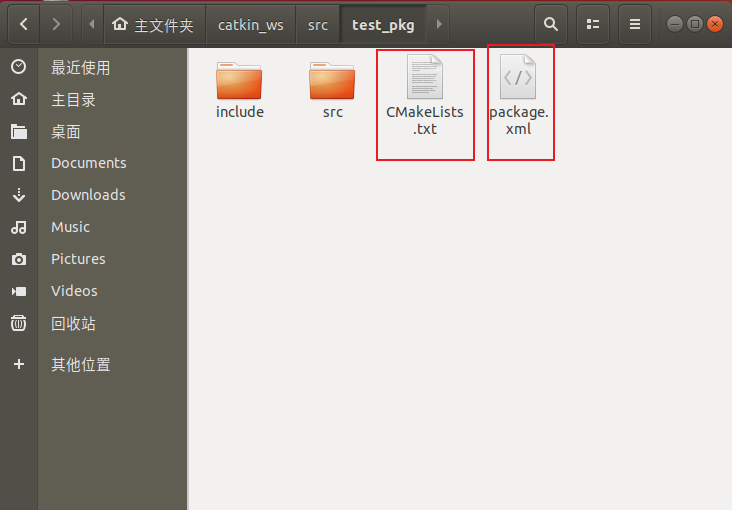
src: 放置功能包源码
include: 放置头文件,如c++里面的.h头文件
CMakeLists.txt 与 package.xml 是每个功能包文件夹中必须存在的两个文件,有这两个文件的存在才标志着你这个文件夹是功能包文件的属性而不是一个普通的文件夹。
编译功能包后如下:
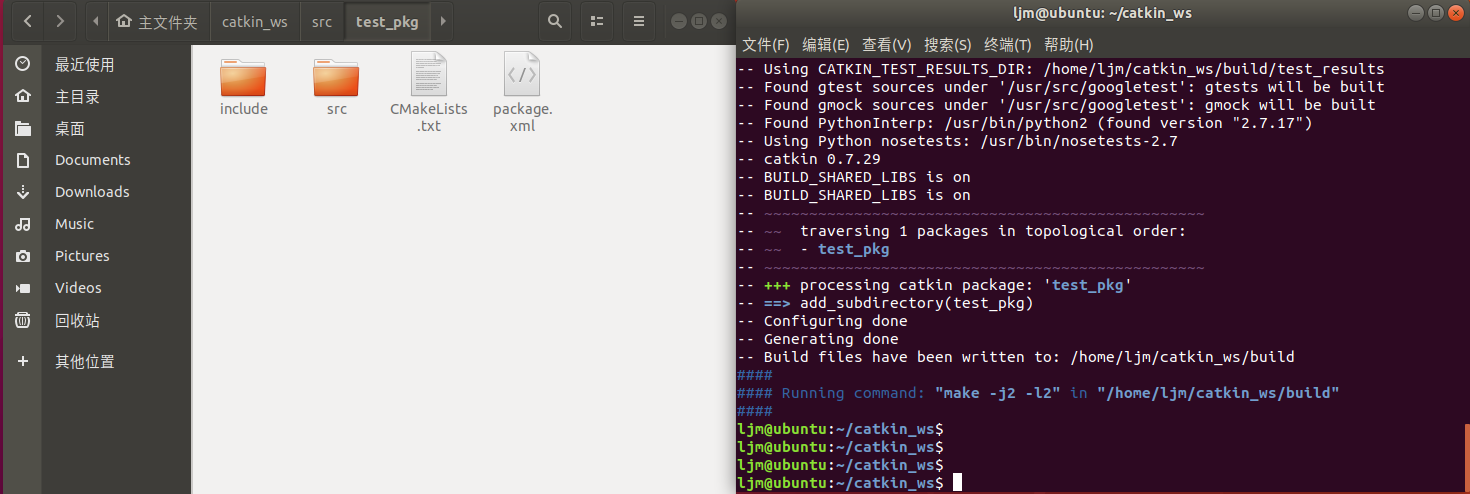
因为功能包内并没有什么代码,所以也并没有什么编译的效果。
编译完成之后,如果我们要运行我们创建的功能包中的某一个程序的话,
我们还需要去设置一下我们创建的工作空间的环境变量,如下:4
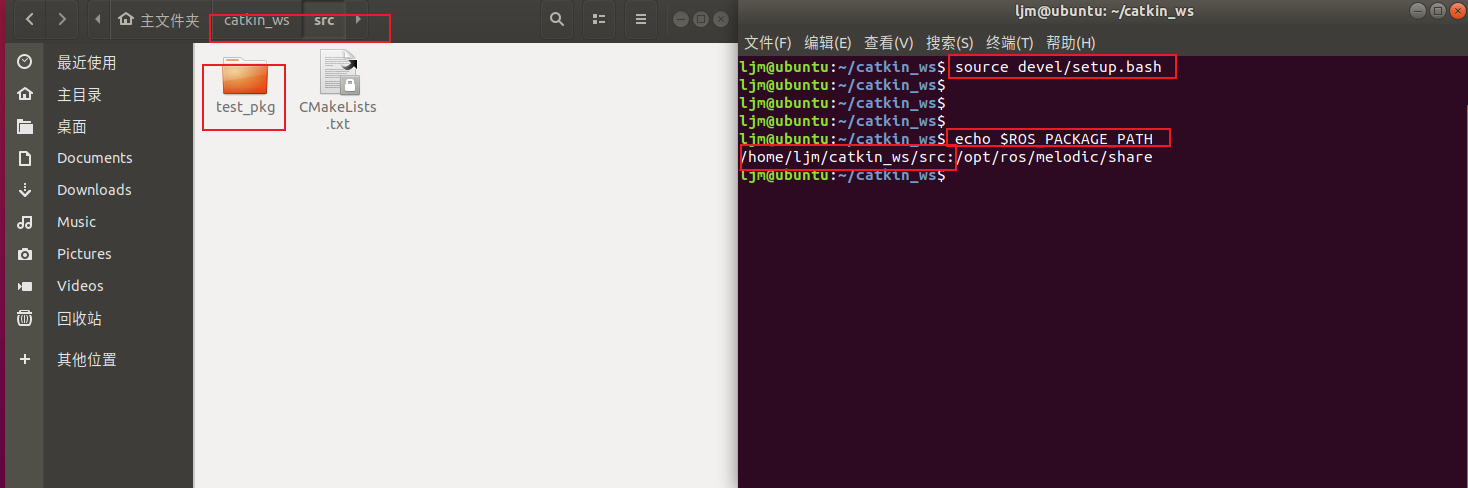
设置环境变量
cd ~/catkin_ws source devel/setup.bash echo $ROS_PACKAGE_PATH
第(1)步:cd ~/catkin_ws , 先切换到catkin_ws功能空间根目录下,
第(2)步:source devel/setup.bash, 对我们创建的catkin_ws工作空间进行环境变量设置,
setup.bash文件在home/catkin_ws/devel下,
只有对catkin_ws工作空间进行环境变量设置之后,
ROS系统才能找到我们创建的catkin_ws工作空间及其里面一些对应的功能包
第(3)步:echo $ROS_PACKAGE_PATH,
ROS_PACKAGE_PATH 是ROS本身的环境变量,
ROS系统里所有的功能包路径都是通过ROS_PACKAGE_PATH这个环境变量查找的,
所以只有上一步对我们创建的catkin_ws工作空间设置了环境变量之后,
我们创建的catkin_ws工作空间的路径才会加到ROS_PACKAGE_PATH中的PATH中。
3. 注意
同一个工作空间下,不能存在同名的功能包;
不同工作空间下,可以存在同名的功能包。
相关文章:
【古月居《ros入门21讲》学习笔记】07_创建工作空间和功能包
目录 说明: 1. 工作空间(workspace) 结构: 2. 创建工作空间和功能包 创建工作空间 编译工作空间 创建功能包 设置环境变量 3. 注意 同一个工作空间下,不能存在同名的功能包; 不同工作空间下,可以存在同名的功…...
第20章多线程
20.1线程简介 Windows操作系统是多任务操作系统,它以进程为单位。一个进程是一个包含有自身地址的程序,每个独立执行的程序都称为进程。也就是说每个正在执行的程序都是一个进程。系统可以分配给每一个进程有一段有限的使用CPU的时间(也可以称…...
深信服防火墙设置应用控制策略(菜鸟必看)
PS:前几天发布了关于深信服防火墙路由部署的流程:深信服防火墙路由模式开局部署-手把手教学(小白篇)-CSDN博客 昨天晚上有csdn的朋友联系我,说有一个关于ACL访问的问题要帮忙看一下 解决了以后,写个大概的…...

解锁 ElasticJob 云原生实践的难题
发生了什么 最近在逛 ElasticJob 官方社区时发现很多小伙伴都在头疼这个 ElasticJob 上云的问题,ElasticJob 本就号称分布式弹性任务调度框架,怎么在云原生环境就有了问题了呢,这就要从 Kubenertes 和 ElasticJob 的一些状态化说起。 有意思的…...

鸿蒙开发已成新趋势
随着华为鸿蒙操作系统的快速崭露头角,鸿蒙开发已然成为当前技术领域的热门新趋势。本文将深入探讨鸿蒙开发的重要性和独特优势,并详细介绍一些关键的鸿蒙开发技术和工具,以及它们对开发者个人和整个行业带来的深远影响。 首先,鸿蒙…...
万人拼团团购小程序源码系统+拼团设置+拼团管理 附带完整的搭建教程
随着互联网的快速发展,电子商务和社交电商的兴起,团购作为一种高效的营销策略和消费方式,受到了广大消费者的热烈欢迎。在此背景下,我们开发了一款基于微信小程序的万人拼团团购系统,旨在为用户提供一种更加便捷、高效…...

软信天成:速看!云端混合数据管理的最佳解决方案
智能时代,互联网、云计算和大数据的应用日益广泛,越来越多的企业将核心IT基础架构迁移至云上,以加速实现企业数字化转型,提高商业用户创新的可能性, 使 IT 变得更加灵活。 各个行业也正在进行从依赖本地系统到混合或云…...

GO 集成Prometheus
一、Prometheus介绍 Prometheus(普罗米修斯)是一套开源的监控&报警&时间序列数据库的组合,起始是由SoundCloud公司开发的。随着发展,越来越多公司和组织接受采用Prometheus,社会也十分活跃,他们便…...

ESP32-Web-Server 实战编程-通过网页控制设备的 GPIO
ESP32-Web-Server 实战编程-通过网页控制设备的 GPIO 概述 前述博客讲解了 Web 编程的基本知识,包括 HTML、CSS、JavaScript 三个部分,从这节开始,我们进入实战部分,在实际项目中进一步学习 ESP32-Web 编程。 GPIO (…...

Springboot 中 指定 AspectJ 的织入模式
在Spring Boot中,AspectJ的织入模式可以通过以下两种方式进行明确指定: 使用配置文件(application.properties或application.yml):在Spring Boot的配置文件中,可以添加以下属性来指定AspectJ的织入模式&am…...
【.NET全栈】.net的微软API接口与.NET框架源码
文章目录 0 前言1 微软官方.net接口学习2 .NET框架源码总结 0 前言 如果浏览器打不开链接,换一个浏览器打开。 我是 打不开微软的链接,使用: 可以打开!!! 1 微软官方.net接口学习 https://docs.microsoft…...
【深度学习】基于深度学习的超分辨率图像技术一览
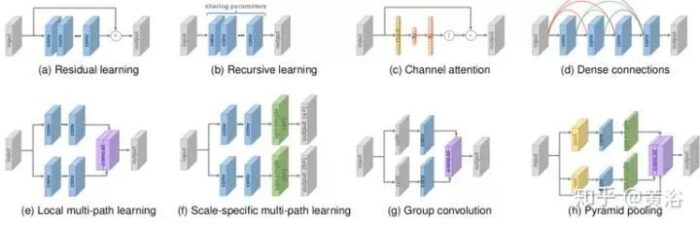
超分辨率(Super-Resolution)即通过硬件或软件的方法提高原有图像的分辨率,图像超分辨率是计算机视觉和图像处理领域一个非常重要的研究问题,在医疗图像分析、生物特征识别、视频监控与安全等实际场景中有着广泛的应用。 SR取得了显著进步。一般可以将现有…...

Android12强制所有应用跟随gsensor旋转
前言 Android12系统中如果机器带gsensor,竖屏应用如果固定了竖屏,当机器旋转为横屏,竖屏应用是不会转到横屏显示的,还是竖屏显示。抖音这种app就是这样的。因为app里面manifest文件中通过android:screenOrientation固定住了竖屏显示。如果要让横屏的时候app也能够横屏显示,…...

C#常用运算符的优先级
前言 运算符在C#编程语言中扮演着重要的角色,用于执行各种计算和操作。了解运算符的优先级是编写高效和正确代码的关键。本文将深入探讨C#中38个常用运算符的优先级划分和理解,并提供详细的说明和示例,以帮助读者更好地理解运算符的使用。 目…...
鸿蒙4.0开发笔记之ArkTS语法的基础数据类型[DevEco Studio开发](七)
文章目录 一、基本数据类型的定义1、变量声明2、数字类型3、字符串类型4、布尔类型5、数组类型6、元组类型7、枚举类型8、联合类型(少用)9、未知Unkown类型10、未定义和空值类型 二、数据类型的使用1、组件内部声明变量不需要使用let关键字2、使用Divide…...

集成学习的两种常见策略:bagging VS. boosting
chatGPT回答,记在这里。 集成学习是一种通过组合多个弱学习器来构建一个更强大的学习器的方法。其中,bagging和boosting是两种常见的集成学习策略。 一、bagging & boosting 简介 Bagging(自助聚集法): Bagging…...

居家适老化设计第三十四条---卫生间之照明
居家适老化卫生间照明设计需要考虑以下几个方面:1. 光源选择:选择适合老年人眼睛的柔和光源,避免刺眼和眩光的发生。可以选择LED灯具,因为它们具有节能、寿命长和可调光的特点。2. 光线布置:在不同区域设置不同的光线&…...
如何使用Cloudreve将个人电脑打造为私有云盘并实现远程访问
文章目录 1、前言2、本地网站搭建2.1 环境使用2.2 支持组件选择2.3 网页安装2.4 测试和使用2.5 问题解决 3、本地网页发布3.1 cpolar云端设置3.2 cpolar本地设置 4、公网访问测试5、结语 1、前言 云存储概念兴起后,现在市面上也已经有了很多公有云盘。但一段时间后…...

[SaaS] 淘宝AI淘淘秀
AIGC技术在淘淘秀场景的探索与实践关键词:图像类AI创新应用、用户轻松创作、内容分享、结合商家品牌。https://mp.weixin.qq.com/s/-3a3_nKeKGON-9-Prd7JKQ 1.生成模版 利用定制的prompt,生成一些比较好的素材图片案例。 最终的用的是通义万相。 2.仿…...

第二证券:机构密集调研消费电子、半导体产业链
据上海证券报记者核算,近一个月来,共有41家消费电子类公司和92家半导体公司(核算标准:申万职业2021,下同)发布出资者调研纪要。其间,有的公司款待了16个批次估计超200家安排,更有公司…...

为什么视频代剪辑会影响你的内容传播效果
为什么你精心拍的视频,发出去却没人看? 你有没有过这样的经历:花了一整天拍Vlog,素材画质高清、内容真实,可一剪出来就显得平淡无奇,点赞寥寥?或者婚礼当天感动全场,回看成片却像流水…...

科华UPS电源全品类汇总:选型与场景适配指南
科华UPS电源作为国内智慧电能领域的主流产品,覆盖家用、办公、机房、工业等全场景,产品系列丰富、规格齐全,但多数用户在选型时,常因分不清系列差异、功率适配、架构类型而踩坑。本文系统汇总科华UPS电源的核心分类、主流系列、核…...

Atomic Layout核心概念解析:Composition组件如何实现布局与间距分离的终极指南
Atomic Layout核心概念解析:Composition组件如何实现布局与间距分离的终极指南 【免费下载链接】atomic-layout Build declarative, responsive layouts in React using CSS Grid. 项目地址: https://gitcode.com/gh_mirrors/at/atomic-layout Atomic Layout…...

RevSSH反向SSH隧道:无公网IP设备的安全远程运维方案
1. 这不是又一个SSH封装工具——RevSSH解决的是“根本性连接悖论”你有没有遇到过这样的场景:一台部署在客户内网的嵌入式设备,没有公网IP,NAT穿透失败,防火墙策略死死锁住所有入向端口,连ICMP都被禁了;或者…...

在模型广场灵活选型让我找到了更适合代码生成的Taotoken模型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在模型广场灵活选型让我找到了更适合代码生成的Taotoken模型 开发代码辅助工具时,选择合适的模型是平衡效果与成本的关…...

告别手动复制!用这个自定义编辑器脚本一键备份/克隆Unity Terrain Data
告别手动复制!用这个自定义编辑器脚本一键备份/克隆Unity Terrain Data在Unity关卡设计和技术美术的工作流中,地形数据的灵活复用往往意味着反复的手动操作——导出高度图、备份材质参数、复制植被分布,每个环节都可能成为效率瓶颈。想象这样…...

基于Atmega 1284P的16位复古计算器:硬件设计与软件实现全解析
1. 项目概述与核心思路最近在整理工作室时,翻出了一堆老旧的7段数码管和矩阵键盘,看着这些充满复古气息的元件,一个想法冒了出来:为什么不自己动手做一台复古风格的计算器呢?不是那种用液晶屏显示的现代计算器…...

API渗透测试:契约驱动的协议/语义/架构三层攻防
1. 为什么“API渗透测试”不是Web渗透的简单延伸?很多人刚接触API安全时,第一反应是:“不就是把Burp Suite抓到的HTTP请求换个参数发一发?跟测网页表单差不多。”我2018年第一次接手某金融类SaaS平台的API安全评估时,也…...

关于内卷,几个值得深想的洞察
首先声明:这篇不劝躺平,也不教内卷——只是想说清楚,你到底在一个什么样的游戏里。 你以为内卷是“资源不足”,其实是“分配方式” 很多人对内卷有个本质上的认知错误:以为内卷是因为资源不够,大家为了抢资…...

3步解决英雄联盟回放难题:ROFL-Player终极使用指南
3步解决英雄联盟回放难题:ROFL-Player终极使用指南 【免费下载链接】ROFL-Player (No longer supported) One stop shop utility for viewing League of Legends replays! 项目地址: https://gitcode.com/gh_mirrors/ro/ROFL-Player 你是否曾经遇到过这样的烦…...