【ESP32】手势识别实现笔记:红外温度阵列 | 双三次插值 | 神经网络 | TensorFlow | ESP-DL
目录
- 一、开发环境搭建与新建工程模板
- 1.1、开发环境搭建与卸载
- 1.2、新建工程目录
- 1.3、自定义组件
- 二、驱动移植与应用开发
- 2.1、I2C驱动移植与AMG8833应用开发
- 2.2、SPI驱动移植与LCD应用开发
- 2.3、绘制温度云图
- 2.4、启用PSRAM(可选)
- 2.5、画面动静和距离检测
- 2.6、图像放大之双三次插值法:权重计算 | 插值计算 | 程序设计
- 四、数据集获取
- 五、CNN模型训练
- 5.1、环境配置:Anconda3 | TF2.1.0 | Pycharm
- 5.2、生成数据集 | 预处理
- 5.2.1、生成数据集:统计数据集 | 数据集随机化 | 数据集划分
- 5.2.2、预处理:string类型转换为float | 数据标准化 | one-hot encoding
- 5.3、构建训练模型
- 5.4、训练结果保存和准确率
- 5.5、ONNX模型转换和校准集导出
- 六、模型量化与部署
- 6.1、模型量化
- 6.2、ESP-DL组件添加
- 6.3、ESP 数据标准化(网络输入)
- 6.4、构建模型与优化
- 6.5、ESP硬件加速:修改sdkconfig配置
- 七、应用逻辑设计
- 7.1、获取静止状态手势 | 定时器引入
- 7.2、交互方式选择:交互方式1
- 7.3、交互方式选择:交互方式2
- 八、others
- 8.1、跑一下示例程序(MNIST)
- 8.2、数据集补充程序
开发板:ESP32-S3-DevKitC-1(ESP32-S3-WROOM-1-N16R8模块)
开发软件:VS Code(Espressif IDF插件) + Anaconda3 + PyCharm
开发框架:ESP-IDF (版本v5.0.4)
训练框架:TensorFlow 2.1.0
部署框架:ESP-DL
💡💡💡💡: 在STM32上跑神经网络做手势识别 🚀
🌎 仓库:https://gitee.com/npc-gitee/esp_dl_for_bixin 🚀
🔍 如理解有误,望不吝指正,感谢。
📍说明:
- 不同手势姿态之间需要具有明显的不同,在使用过程中,手势姿态需要做到位;(可能数据集不足)
- 影响体表温度的因素比较多,由于影响因素的变化,存在部分位置接近环境温度情况,所以即使加入了数据标准化,依然存在推理不准问题;(可能数据集不足)
- 在使用测试中,某个动作出现判断出错,可以将该动作添加到数据集中,在上一次权重文件基础上再训练,修修补补;
- 距离传感器较远,细节难以捕捉,不同手势差异较小,已经无法通过增加数据集来提高预测正确率;
- 该数据集动作主要在中心位置,所以使用过程中动作保持在中心;
- 本示例通过分类任务实现手势识别,如果出现新的手势类别,预测结果就很迷,采用RNN、LSTM等的方式,使用效果应该会较好。
一、开发环境搭建与新建工程模板
1.1、开发环境搭建与卸载
考虑 ESP-DL 库所支持的版本为 ESP-IDF v5.0,所以这里安装的不是最新版本。
在安装 VS Code插件 (Espressif IDF) 后,可以选择两种安装方式:
- 在线安装+自动配置 🚀
- 离线安装+手动配置 🚀 (该教程使用的编译操作为 cmd 的方式)
这里采用离线安装+手动配置(VS Code下完成程序编辑和编译操作) 💡。
① ESP-IDF 开发环境搭建:
- 下载ESP-IDF离线版本:ESP-IDF Windows Installer Download 🚀
- 离线安装
ESP-IDF,安装完成后,安装路径下有三个重要的目录;- frameworks/esp-idf-v5.0.4:内含示例代码和组件源代码等;
- tools:编译器等程序;
- python_env/idf5.0_py3.11_env:python虚拟运行环境,内含python.exe、pip.exe以及依赖的库等。
- 打开
VS Code,安装插件Espressif IDF; - VS Code 手动配置;
a) 打开vscode左侧的插件管理页 => 找到espressif idf => 点击该插件旁边的小齿轮 => 扩展设置,就能看到 ESP-IDF 的配置属性;
b) 将路径信息添加到这些变量中:Custom Extra Paths、Custom Extra Vars、Esp Idf Path Win、Esp Idf Path Win、Git Path、Python Bin Path、Tools Path Win;(参考:esp32 开发环境:windows10 + esp-idf v4.4 + vscode + 插件 espressif idf 搭建踩坑 🚀) - 重启一下VS Code。
② 打开一个Example进行测试:
- 按住
Ctrl+Shift+p打开命令行,这里输入ESP-IDF show,点击ESP-IDF: Show Eaxmples Projects,点击需要使用的 ESP-IDF 路径; - 左边栏中选择 hello word 工程,点击
Create project using example hello_world。

- 选择这个项目的保存路径,任意路径均可;
- 烧录过程配置;
- COM 口的配置,选择对应的COM口;
- ESP32芯片选择,这里选ESP32s3;
- 烧录方式选择串口转USB:
ESP32-S3 chip(via ESP-PROG)- 设置波特率:File => Preferences => Settings => 输入ESP-IDF,然后往下滑找到 Flash Baud Rate,输入115200。(波特率不同,会导致终端输出乱码)

- 点击编译,成功后就可以进行烧录了。
③ 卸载ESP-IDF: 控制面板 => 卸载程序 => ESP-IDF Tools Offline 5.0.4 右键卸载。(VS Code 下的配置直接重置就好)
1.2、新建工程目录
- 打开
VS Code,此时界面可能是很干净,没有打开项目;这里需要随便打开一个目录(不然第二步操作完发现没响应); - 按住
Ctrl+Shift+p打开命令行,输入ESP-IDF: Create project from extension template,点击;然后就按照提示操作就可以了; - 选择项目保存目录;
- 这里选择
template-app,接着就弹出了一个新的VS Code界面,关掉前一个VS Code界面; - 这时候指定目录下就有一个生成的文件夹,修改文件夹名称,方便以后管理(该操作不影响编译);
- 打开该目录根目录下的
CmakeLists.txt,将project(template-app)修改为project(xxx),这样之后生成的可执行文件的名称就是xxx.bin,而不是template-app.bin。点击一下编译查看是否有问题。
1.3、自定义组件
到这一步就可以开发了,为了项目条理更加清晰,还需要引入【自定义组件】。
一般而言,自定义组件可以简单理解为一个目录,里面存放一些功能函数,提供给main函数进行调用。
- 打开
ESP-IDF 5.0 CMD终端,切换到待创建的目录,输入idf.py -C components create-component led;(当然可以手动创建目录和文件)

- components:创建的组件(目录),位于那个目录下,如果没有这个目录就创建,Cmake管理默认的目录名称叫
components,如果起了其它名称,需要用EXTRA_COMPONENT_DIRS变量进行说明。
- 在所在项目根目录下的CmakeLists.txt 中加入这条语句:
set(EXTRA_COMPONENT_DIRS ./新名字)- led:组件的名称。
生成后项目目录树如下:
---Test|---.devcontainer|---.vscode|---build|---CMakeLists.txt|---sdkconfig|---components|---led|---include|---led.h|---CmakeLists.txt|---led.c|---key|---include|---key.h|---CmakeLists.txt|---key.c|---main|---CmakeLists.txt|---main.c
-
将组件中的头文件添加到main.c中,这样就可以进行编译了。
-
如果led组件需要key组件的函数,则:
- led.h 中加入
#include "key.h" - 方式一:led 组件中的 CmakeLists.txt 中加入头文件路径:
INCLUDE_DIRS "include" "../key/include"(注意这里可是没指定链接路径,但还是能找到) - 方式二:led 组件中的 CmakeLists.txt 中加入依赖组件:
REQUIRES driver key(这里led依赖两个组件:driver和key)
- led.h 中加入
-
在 IDF 5.0 的版本之后,driver 组件不作为公共依赖项,所以使用的时候,必须在 CmakeLists.txt 中声明依赖 driver 组件后才能使用:
idf_component_register(SRCS "led.c"INCLUDE_DIRS "include"REQUIRES driver)
如果没有添加这个组件,则会报错:driver/gpio.h: No such file or directory 🚀
REQUIRES 和 PRIV_REQUIRES 的区别:组件依赖示例 🚀
参考:
[1]: ESP-IDF编程指南 🚀
[2]: ESP—IDF开发(1)创建模板工程 🚀
[3]: ESP32学习笔记(21)——构建自己的工程和组件库 🚀
[4]: ESP32 ESP-IDF自定义组件 🚀
[5]: ESP32开发 CMakeLists包含同级目录.h文件,error: gpioX.h: No such file or directory 🚀
二、驱动移植与应用开发
管脚布局:

I2C0引脚资源使用情况: 支持任意 GPIO 管脚
------------------------------------| AMG8833 | ESP32 |------------------------------------| VIN | 3.3V || GND | GND || SCL | GPIO2 || SDA | GPIO1 || INT | / || AD0 | GND | ------------------------------------
SPI3引脚资源使用情况: 支持任意 GPIO 管脚
------------------------------------| LCD Screen | ESP32 |------------------------------------| GND | GND || VCC | VCC(3.3v) || SCL | GPIO5(SCLK) || SDA | GPIO6(MOSI) || RES | GPIO7 || DC | GPIO15 || CS | GPIO16 || BLK | GPIO17 |------------------------------------
2.1、I2C驱动移植与AMG8833应用开发
ESP32-S3 有2个 I2C 控制器,每个控制器都可以设置为主机或从机,本次示例中作为主机使用。
- 当 8x8 中某个测点出现超过极限值就会触发INT引脚电平变化,ESP32 通过 INT 引脚触发外部中断;ESP32 通过读取寄存器的值就可以确定哪个矩阵测点触发电平变化。
- AMG8833 SCL最大支持
400kHz。 AD0(AD_SELECT)为 I2C设备地址选择脚。拉低,设备地址为110 1000,即0x68。拉高,设备地址为110 1001,即0x69。- EPS32-S3 的 I2C 引脚原则上可选择任意引脚,在 I2C 初始化的时候指定即可,并将引脚设置为
Enable GPIO pull-up resistor。
“ ESP32-S3 的内部上拉电阻范围为几万欧姆,因此在大多数情况下,它们本身不足以用作 I2C 上拉电阻。建议用户使用阻值在 I2C 总线协议规范规定范围内的上拉电阻。计算阻值的具体方法,可参考 TI 应用说明 🚀 ” —— ESP-IDF 编程指南(API参考=>外设API=>I2C驱动程序)
对于AMG8833而言,可以直接使用而不用外接上拉电阻。
主机写入数据:
- 使用
i2c_cmd_link_create()创建一个命令链接。然后,将一系列待发送给从机的数据填充命令链接:
a. 启动位 -i2c_master_start()
b. 从机地址 -i2c_master_write_byte()。提供单字节地址作为调用此函数的实参。
c. 数据 - 一个或多个字节的数据作为i2c_master_write()的实参。 - 通过调用
i2c_master_cmd_begin()来触发 I2C 控制器执行命令链接。一旦开始执行,就不能再修改命令链接。(一般报错出现在该语句) - 命令发送后,通过调用
i2c_cmd_link_delete()释放命令链接使用的资源。

主机读取数据的步骤基本相似。

ESP-IDF 对这两个过程进行了封装:
- 主机读取数据:
i2c_master_write_read_device() - 主机写入数据:
i2c_master_write_to_device()
基本过程同上面一致,本示例依据这两个函数源代码,进行简单修改。
AMG8833 需要进行初始化寄存器:正常读取前需要进行初始化操作。
- Power Control寄存器:设置AMG8833的工作模式;
- Reset寄存器:进行软复位;
- Frame Rate寄存器:设定帧率;
- Interrupt Control寄存器:配置中断功能;
AMG8833 Temperature寄存器:红外点阵测量的温度值。

两个寄存器的数据组合起来获得一个测点的温度值。有12位数据,最高位为符号位,0为正,1为负。最小变化单位为0.25℃。
在读取64个像素点温度值时候,I2C只需要指定第一个寄存器地址以及读取的字节数量,AMG8833自动发送后面地址的数据。
- amg8833的初始化程序、读写程序等功能函数参考Arduino框架下的程序。
- ESP32-S3-Devkitc-1 开发板在Arduino IDE 中找不到对应的板子,此时更新一下即可。(工具 => 开发板: “xxx” => 开发板管理器…)
/* Arduino框架下测试代码, 用于对比在ESP-IDF框架下驱动与应用是否正常* 这里在测试代码的基础上增加/修改了两条语句:* => Wire.setPins(1,2); // 设置新的I2C引脚* => status = amg.begin(0x68, &Wire); //amg8833初始化, 0x68为amg8833设备地址
*/#include <Wire.h>
#include <Adafruit_AMG88xx.h>Adafruit_AMG88xx amg;float pixels[AMG88xx_PIXEL_ARRAY_SIZE];void setup() {Serial.begin(9600);Serial.println(F("AMG88xx pixels"));bool status;Wire.setPins(1,2); //new SDA SCL pins// default settingsstatus = amg.begin(0x68, &Wire);if (!status) {Serial.println("Could not find a valid AMG88xx sensor, check wiring!");while (1);}Serial.println("-- Pixels Test --");Serial.println();delay(100); // let sensor boot up
}void loop() { //read all the pixelsamg.readPixels(pixels);Serial.print("[");for(int i=1; i<=AMG88xx_PIXEL_ARRAY_SIZE; i++){Serial.print(pixels[i-1]);Serial.print(", ");if( i%8 == 0 ) Serial.println();}Serial.println("]");Serial.println();//delay a seconddelay(1000);
}
参考:
[1]: ESP_IDF—I2C 驱动程序 🚀
[2]: ESP32 之 ESP-IDF 教学(六)——硬件I2C总线外设(I²C) 🚀
[3]: AMG8833的使用与stm32驱动代码 🚀
[4]: ESP32 I2C自定义引脚 🚀
[5]: ESP32-S3入门Arduino开发(一)–Arduino环境搭建 🚀
2.2、SPI驱动移植与LCD应用开发
ESP32-S3-DevKitC-1 开发板采用 ESP32-S3-WROOM-1/1U 或 ESP32-S3-WROOM-2/2U 模组,而这些模组采用 ESP32-S3芯片。
ESP32-S3 芯片集成了四个 SPI 控制器:
- SPI0
- SPI1
- 通用 SPI2,即GP-SPI2
- 通用 SPI3,即GP-SPI3
SPI0 和 SPI1 控制器主要供内部使用以访问外部 flash 及 PSRAM,如上图所示。这里采用 SPI3 作为 LCD 通信控制器。
SPI有多种模式:为兼容LCD通信规范,这里采用普通 SPI 模式。
- 普通 SPI 模式
- 双线输出模式
- 双线输出模式
- 四线输出模式
- 四线 I/O 模式
- 八线输出模式
- OPI 模式
- MOSI:主机输出,从机输入,也写作SPID;
- MISO:主机输入,从机输出,也写作SPIQ;
- CS:片选,表示设备被选中;
- SCLK:串行时钟,由主机产生的振荡信号,使数据位的传输保持同步;
- QUADWP:写保护信号。只用于 4 位 (qio/qout) 传输;
- QUADHD:保持信号。只用于 4 位 (qio/qout) 传输。
LCD驱动和应用编写:
- SPI初始化:引脚指定、频率、最大传输数据大小、是否开启DMA等,主要配置
spi_bus_config_t和spi_device_interface_config_t结构体;通过spi_bus_initialize和spi_bus_add_device函数完成配置;
spi_bus_config_t结构体成员max_transfer_sz表示最大传输大小,以字节为单位。
- 若一次传输超过
max_transfer_sz设置的大小,则会出现:txdata transfer > host maximum 错误;- 若
max_transfer_sz设置的大小过大(测试过程中使用大于36000),出现 SPI 传输不完全。
根据 ESP32-S3 系列芯片技术规格书,SPI3 可指定为任意 GPIO 管脚。
按照 Arduino 框架驱动程序,LCD 采用的 SPI 时钟频率为 27Mhz。
- 普通GPIO初始化:DC、RST、BCK引脚不在SPI协议所规定的引脚,所以需要单独进行初始化;
对于SPI协议本身而言,传输信息不区分命令和数据,LCD从设备收到信息的时候,需要区分命令和数据,这里通过 DC 引脚电平信号加以区分,当DC为低电平时,SPI传输的是命令,当DC为高电平时,SPI 传输的数据。
- 编写命令/数据SPI发送函数;
- 编写LCD初始化;
- 编写矩形绘制和图片显示函数,验证程序工作正常。
xxx.h: No such file or directory
跳转能正常,但是编译的时候提示没有这个文件,通过清除一下编译的中间文件,然后再编译就可以了。

AMG8833/LCD与ESP32之间采用杜邦线连接,杜邦线受到外界扰动会影响I2C和SPI的通信。
参考:
[1]: ESP32-IDF开发笔记 | 03 - 使用SPI外设驱动ST7789 SPILCD 🚀
[2]: 【ESP32-IDF】 02-4 外设-SPI 🚀
[3]: ESP-IDF 编程指南:SPI 主机驱动程序 🚀
2.3、绘制温度云图
camColors全局变量数组,里面保存颜色数据(RGB565),共有256种颜色,0索引保存为蓝色,255索引保存为红色。
最大温度记作: T m a x T_{max} Tmax;最小温度记作: T m i n T_{min} Tmin;当前温度记作: T c u r T_{cur} Tcur。
最小索引值记作: i d x idx idx。
建立温度和颜色的映射关系:
T m a x − T m i n 255 − 0 = T c u r − T m i n x − 0 \frac{T_{max}-T_{min}}{255-0}=\dfrac{T_{cur}-T_{min}}{x-0} 255−0Tmax−Tmin=x−0Tcur−Tmin
转换为:
x = 255 ∗ T c u r − T m i n T m a x − T m i n x=255*\dfrac{T_{cur}-T_{min}}{T_{max}-T_{min}} x=255∗Tmax−TminTcur−Tmin
Arduino 框架官方提供了映射函数——map函数,主题思想一致的,细节上有些差异,具体表示如下:
x = 255 ∗ ( T c u r − T m i n ) + ( T m a x − T m i n ) / 2 T m a x − T m i n + i d x = 255 ∗ T c u r − T m i n T m a x − T m i n + 0.5 + i d x x=\dfrac{255*{(T_{cur}-T_{min})}+(T_{max}-T_{min})/2}{T_{max}-T_{min}}+idx=255*\dfrac{T_{cur}-T_{min}}{T_{max}-T_{min}}+0.5+idx x=Tmax−Tmin255∗(Tcur−Tmin)+(Tmax−Tmin)/2+idx=255∗Tmax−TminTcur−Tmin+0.5+idx
浮点型赋值给整型,小数部分舍去,这里加上0.5,实现四舍五入。
最大温度和最小温度选择?
假设待测温度区间为20-25℃,若设置最大温度为30℃、最小温度0℃,那么对于256种颜色,用于表示20-25℃区间的颜色约为(30-0)/256*5=43种;若设置最大温度为30℃、最小温度15℃,用于20-25℃区间的颜色约为(30-15)/256*5=85种,用于显示的颜色越多,显示跨度越大,越能显示温度的细微变化,显示效果更好,所以最大温度和最小温度的跨度不要太大。
温度云图显示上下颠倒问题
从AMG8833读入ESP32内存的时候,点阵的左右顺序没有打乱,上下顺序倒了一下,所以在LCD显示的时候出现了上下翻转,这里另外写一个功能函数将点阵顺序调整为amg8833原先的顺序。

2.4、启用PSRAM(可选)
选用的芯片 ESP32-S3 N16R8(片内PSRAM 8MB + 片外FLASH 16MB),内部 SRAM 只有 512 KB,考虑显示一张 240x240 的图片需要的内存大小为 240x240x2=115200 Bytes=112.5KB,所以这里可以考虑采用PSRAM作为显存。(本示例中显示区域较小,所以没有使用)
- 点击齿轮

- 输入 RAM查找一下两项,勾选
Support for external, SPI-connected RAM以及模式选择Octal Mode PSRAM。
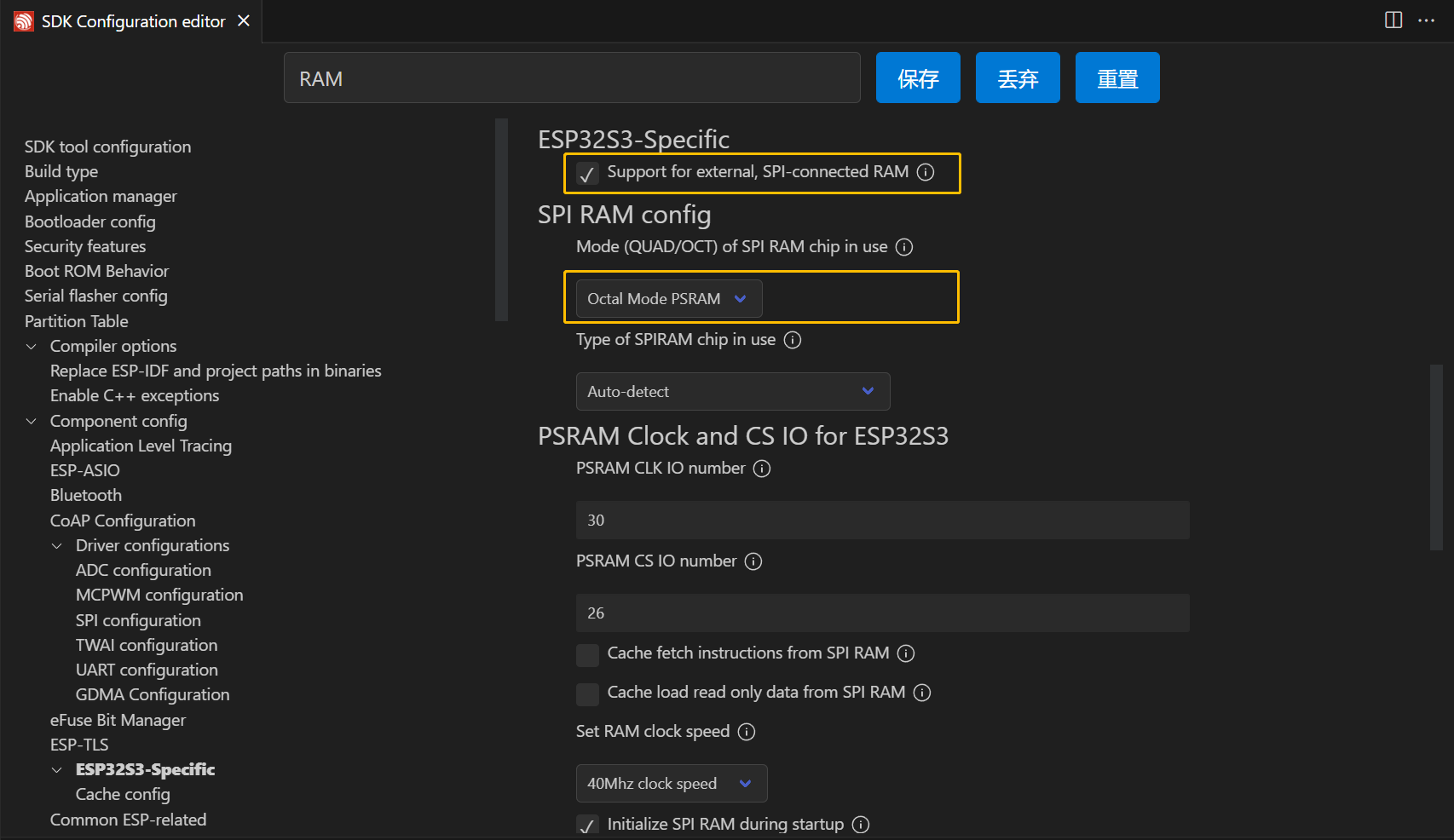
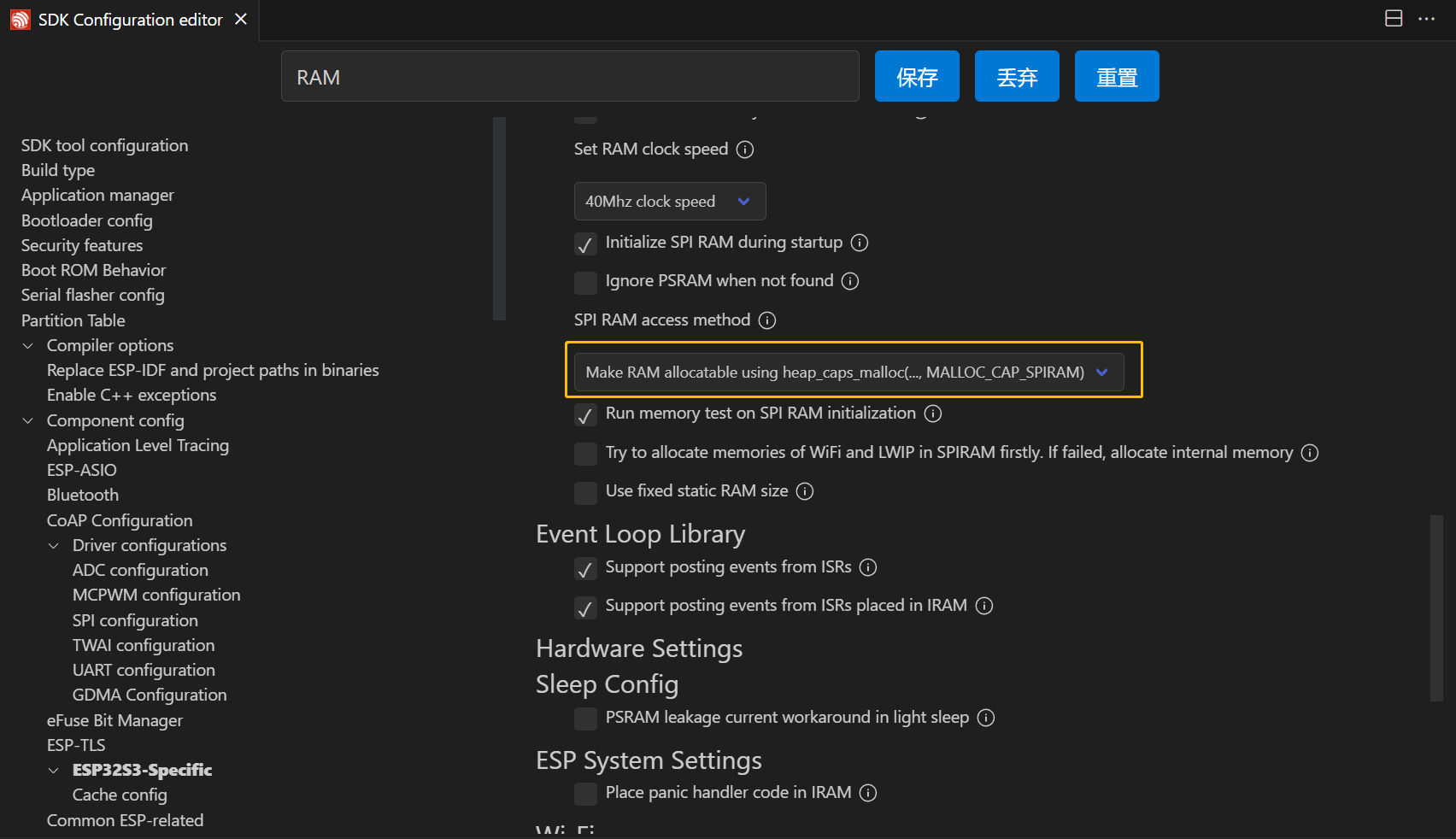
- 选择
Make RAM alloctable using heap_caps_malloc(...,MALLOC_CAP_SPIRAM),也可以选择Make RAM allocatable using malloc() as well,之所以选择前者是从存储器的使用上考虑:若从片上 SRAM 分配空间,则使用malloc函数,若从片外 PSRAM 上分配空间,则使用heap_caps_malloc函数。
- 其它参数可使用默认。
- 保存,然后编译。
报错: psram: PSRAM ID read error: 0x00ffffff
\, \, \, \, \, \, \, \, \, \, \, cpu_start: Failed to init external RAM!
解决:模式选择Octal Mode PSRAM
参考:ESP32 s3 PSRAM ID read error: 0x00ffffff 已解决。 🚀
问题:assert failed: block_trim_free heap_tlsf.c:377 (block_is_free(block) && “block must be free”)
解决: 如果较快的申请资源和释放资源可能会出现这个问题(ESP-IDF4.4),可以尝试增加一下延时函数vTaskDelay(100 / portTICK_PERIOD_MS)。
2.5、画面动静和距离检测
为什么要做画面动静判断?
1.在不使用 RNN/LSTM 的情况下,如果一个动作一直保持,那么就会认为做了多个相同的动作,那么就会根据这个结果执行多次;
2. 如果使用 RNN/LSTM ,数据集创建工作量较大。 所以综合考虑,结合画面动静判断和CNN网络实现手势识别。
这里画面动静判断采用帧间差分法,以目标温度较小值为分界点,区分背景和目标,将两帧温度矩阵(24x24)的对应点进行相减,并取其绝对值,若大于阈值(目标和背景采用不同阈值)则计数值加1,当计数值大于某个值(距离不同,检测到目标的大小也不同,这个值是实时调整)后,则认为画面中存在运动目标。
在实现过程中,由于对比两帧数据,所以需要保存前一帧温度矩阵数据,一帧数据大小为24x24x4(float) = 2.25KB,这里采用 异步内存拷贝(Asynchronous Memory Copy),其核心技术在于DMA,通过给DMA发送命令,实现内存拷贝,此时不需要CPU参与,当传输完成后通过回调函数发送信号通知被阻塞的任务。
异步内存拷贝:
/*-------------------> 安装 <-------------------*/
config = ASYNC_MEMCPY_DEFAULT_CONFIG();
config.backlog = 16; // update the maximum data stream supported by underlying DMA engine
async_memcpy_t mem_driver = NULL;
ESP_ERROR_CHECK(esp_async_memcpy_install(&config, &mem_driver)); // install driver with default DMA engineSemaphoreHandle_t my_semphr = xSemaphoreCreateBinary(); // Create a semaphore used to report the completion of async memcpy/*--------------> 发送内存拷贝请求 <--------------*/
ESP_ERROR_CHECK(esp_async_memcpy(mem_driver, out_img_buf_pre, out_img_buf, COPY_LEN, my_async_memcpy_cb, &myflags));/*-----------> 拷贝完成后调用回调函数 <-----------*/
// Callback function, running in ISR context
static bool my_async_memcpy_cb(async_memcpy_t mcp_hdl, async_memcpy_event_t *event, void *cb_args)
{/*可自定义标志*/BaseType_t high_task_wakeup = pdFALSE;xSemaphoreGiveFromISR(my_semphr, &high_task_wakeup); // high_task_wakeup set to pdTRUE if some high priority task unblockedreturn high_task_wakeup == pdTRUE;
}/*-----------> 阻塞等待内存拷贝完成 <-----------*/
xSemaphoreTake(my_semphr, portMAX_DELAY); // Wait until the buffer copy is done
画面动静判断逻辑:
//获取第一帧24x24温度矩阵
readPixels{}
//保存第一帧数据
mem2mem{1.发送内存拷贝请求2.sigflag = 1
}while(1){readPixels{} //获取24x24温度矩阵motion_detection{if(sigflag == 1){1.阻塞等待内存拷贝完成2.sigflag == 0}/*画面动静判断*/if(运动){mem2mem{} // 如果运动, 保存当前帧数据}else{ // 静止, 不保存数据}}
}
- 获取第一帧24x24温度矩阵;
- 保存第一帧数据;
- 获取第二帧24x24温度矩阵;
- 因为是第一帧,所以等待第一帧保存完成;
- 判断是否运动,若为运动,保存当前帧(第二帧),下一次和第二帧做比较,若为静止,不用保存,下一次和第一帧做比较;
- 开始第二次循环,获取第三帧24x24温度矩阵;
- 是否之前有保存操作,没有就不用阻塞等待,有就阻塞等待;
- 判断是否运动,继续循环往复。
为什么运动时候保存当前帧,静止时候不保存当前帧?
如果每一帧都保存,当动~~~作~~~比~~~较~~~慢~~~时,那么连续两帧比较的时候就会认为没有运动,保存当前帧,之后获取下一帧,同样变化小,认为没有运动,导致最后动作很大了,还是认为没有运动;若静止的不保存,前一帧保存的是最原先的一帧数据,虽然动作慢,但幅度达到一定大小后,就会认为运动了。
考虑自适应参数:如果距离比较远,那么目标比较小,动作也会不容易捕捉,如果距离比较近,捕捉比较敏感,所以考虑引入自适应参数,动态调整阈值和点阵数量(通过大于某个温度的像素点个数确定目标大小,从而判断远近)。
参考:
[1]: 运动目标检测——帧间差分法(Temporal Difference)简介 🚀
[2]: winform 画面关闭返回值_opencv+python判断画面动静 🚀
[3]: The Async memcpy API 🚀
为什么要做目标距离判断?
这里的距离指的是远近,若捏住+近距离的特征表示左移,若捏住+远距离的特征表示右移,那么在使用过程中需要自己把握这个距离,因此,考虑引入距离检测,当发现用户捏住行为,然后捕捉动作,若为靠近,则认为左移,若为远离,则认为右移。
目标距离检测实现原理:靠近传感器温度高,远离传感器温度低。
这种方式存在一个问题:如果目标远离检测范围那么温度也会下降,进入检测范围那么温度也会上升,更复杂是前后左右平移+上下平移的复合动作,这里暂时不考虑,只考虑上下平移。🔍
2.6、图像放大之双三次插值法:权重计算 | 插值计算 | 程序设计
对于低分辨图像在高分辨率的设备上显示,如果不做任何处理,那么实际显示区域会很小,为了扩大显示区域,就需要对低分辨率的图像进行数值图像放大处理,就是将低分辨率的图像变成高分辨率的图像,多出来的像素怎么获得?—— 插值算法。
虽然变成了高分辨率图像,但是这是由低分辨率的数据生成的,所以不会很高清。
常见的插值算法:自适应和非自适应。
非自适应算法:最近邻,双线性,双三次,样条等。双三次插值效果较好,但是时间开销比较大。
基本步骤:
- 计算权重
- 计算放大图像后的像素值
1、权重计算
原图片:8x8
放大后的图片:16x16

将【放大后的图片】缩小到【原图片】的大小,如下图所示:

缩小后,每个像素(共16x16个)都需要计算权值。当计算某个像素权值时,取该像素上下左右邻近的四个点,在这四个点为基础,向外再扩充一圈,总共取16个点,如下图所示:

将上面的距离数据代入权重计算公式:
W ( x ) = { ( a + 2 ) ∣ x ∣ 3 − ( a + 3 ) ∣ x ∣ 2 + 1 f o r ∣ x ∣ ≤ 1 a ∣ x ∣ 3 − 5 a ∣ x ∣ 2 + 8 a ∣ x ∣ − 4 a f o r 1 ≤ ∣ x ∣ ≤ 2 0 o t h e r s W(x)= \begin{cases} (a+2)|x|^3-(a+3)|x|^2+1 \,\,\,\,\,\,\,\,\,for\,\,\, |x|≤1\\ a|x|^3-5a|x|^2+8a|x|-4a \,\,\,\,\,\,\,\,\,\,\,\, for \,\,\, 1≤|x| ≤2\\ 0 \,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,others \end{cases} W(x)=⎩ ⎨ ⎧(a+2)∣x∣3−(a+3)∣x∣2+1for∣x∣≤1a∣x∣3−5a∣x∣2+8a∣x∣−4afor1≤∣x∣≤20others
式中, x x x 为目标像素点距离邻近像素点的距离; a a a 一般取 − 0.5 -0.5 −0.5。
对于【米黄色】的点,X轴方向距离为0.6,Y轴方向距离为1.3。
-
X轴方向:
W ( x ) = ( a + 2 ) ∣ x ∣ 3 − ( a + 3 ) ∣ x ∣ 2 + 1 = ( − 0.5 + 2 ) ∗ ∣ 0.6 ∣ 3 − ( − 0.5 + 3 ) ∗ ∣ 0.6 ∣ 2 + 1 = 0.424 \begin{aligned} W(x) &= (a+2)|x|^3-(a+3)|x|^2+1 \\ &= (-0.5+2)*|0.6|^3-(-0.5+3)*|0.6|^2+1\\ &= 0.424 \end{aligned} W(x)=(a+2)∣x∣3−(a+3)∣x∣2+1=(−0.5+2)∗∣0.6∣3−(−0.5+3)∗∣0.6∣2+1=0.424 -
Y轴方向:
W ( y ) = a ∣ x ∣ 3 − 5 a ∣ x ∣ 2 + 8 a ∣ x ∣ − 4 a = ( − 0.5 ) ∗ ∣ 1.3 ∣ 3 − 5 ∗ ( − 0.5 ) ∗ ∣ 1.3 ∣ 2 + 8 ∗ ( − 0.5 ) ∗ ∣ 1.3 ∣ − 4 ∗ ( − 0.5 ) = − 0.0735 \begin{aligned} W(y) &= a|x|^3-5a|x|^2+8a|x|-4a \\ &= (-0.5)*|1.3|^3-5*(-0.5)*|1.3|^2+8*(-0.5)*|1.3|-4*(-0.5)\\ &= -0.0735 \end{aligned} W(y)=a∣x∣3−5a∣x∣2+8a∣x∣−4a=(−0.5)∗∣1.3∣3−5∗(−0.5)∗∣1.3∣2+8∗(−0.5)∗∣1.3∣−4∗(−0.5)=−0.0735
对于【浅绿色】的点,X轴方向距离为1.6,Y轴方向距离为1.3。
-
X轴方向:
W ( x ) = a ∣ x ∣ 3 − 5 a ∣ x ∣ 2 + 8 a ∣ x ∣ − 4 a = ( − 0.5 ) ∗ ∣ 1.6 ∣ 3 − 5 ∗ ( − 0.5 ) ∗ ∣ 1.6 ∣ 2 + 8 ∗ ( − 0.5 ) ∗ ∣ 1.6 ∣ − 4 ∗ ( − 0.5 ) = − 0.048 \begin{aligned} W(x) &= a|x|^3-5a|x|^2+8a|x|-4a \\ &= (-0.5)*|1.6|^3-5*(-0.5)*|1.6|^2+8*(-0.5)*|1.6|-4*(-0.5)\\ &= -0.048 \end{aligned} W(x)=a∣x∣3−5a∣x∣2+8a∣x∣−4a=(−0.5)∗∣1.6∣3−5∗(−0.5)∗∣1.6∣2+8∗(−0.5)∗∣1.6∣−4∗(−0.5)=−0.048 -
Y轴方向:
W ( y ) = a ∣ x ∣ 3 − 5 a ∣ x ∣ 2 + 8 a ∣ x ∣ − 4 a = ( − 0.5 ) ∗ ∣ 1.3 ∣ 3 − 5 ∗ ( − 0.5 ) ∗ ∣ 1.3 ∣ 2 + 8 ∗ ( − 0.5 ) ∗ ∣ 1.3 ∣ − 4 ∗ ( − 0.5 ) = − 0.0735 \begin{aligned} W(y) &= a|x|^3-5a|x|^2+8a|x|-4a \\ &= (-0.5)*|1.3|^3-5*(-0.5)*|1.3|^2+8*(-0.5)*|1.3|-4*(-0.5)\\ &= -0.0735 \end{aligned} W(y)=a∣x∣3−5a∣x∣2+8a∣x∣−4a=(−0.5)∗∣1.3∣3−5∗(−0.5)∗∣1.3∣2+8∗(−0.5)∗∣1.3∣−4∗(−0.5)=−0.0735
若插值的像素点落在原图内部网格上,16个点怎么取?
对于这种情况,可以有两种选择,要么认为位于左侧网格,要么认为位于右侧网格,在做插值处理的时候,需要做到统一。(落在上下网格也有相同的情况,也需要做到统一)
这里统一为左上。

若插值的像素点落在原图边界上,16个点怎么取?
将原图进行padding处理,往外部扩两层,像素值与原图边界值相同。

每个插值的像素都是由16个原图中像素加权计算所得,每一行X轴方向权重相同,每一列Y轴方向权重相同,所以一个插值的像素需要进行8次权重计算。
2、插值计算
计算红点位置的像素值,取4x4区域中的16个点。
然后计算原图像素和权重的Hadamard积:

Hadamard积:矩阵相同位置元素相乘,数学符号 ⊙ \odot ⊙。

最后,将矩阵中所有元素相加得到了插值的像素值。


由上图可知:
- 当距离为0的时候, W = 1 W=1 W=1
- 当距离为-1或1的时候, W = 0 W=0 W=0
- 当距离为-2或2的时候, W = 0 W=0 W=0
所以当【放大后的图片】像素点与【原图片】像素点重合的时候,距离绝对值取值可能为0、1和2,那么最后插值计算的结果就是重合原图片像素点。
参考:
[1]: 用于数字成像的双三次插值技术 🚀
[2]: 插值算法 | 双三次插值算法 🚀(视频中a = -0.75)
3、程序设计
按照上述基本原理进行程序实现,具体函数在 gesture_display.cpp 文件中,其中有两个主要接口:
interpolate_image函数:实现8x8温度值放大成24x24温度值;temp_cloud_map_display函数:将温度值通过云图方式在LCD上显示;
+----------------------------------------------------------------------------+
| +-------------------------------+|
| ==> getW_x() ==> weight_xy_adjust2D() ==> | matrix_hadamard_pruduct() ||
| ==> getW_y() ==> weight_xy_adjust2D() ==> | img_matrix_hadamard_pruduct() ||
| ==> img8x8_pad_to_img12x12() ===========> | matrix_elem_sum() ||
| +-------------------------------+|
|----------------------------------------------------------------------------|
| ************************* interpolate_image() ************************* |
+----------------------------------------------------------------------------+
img8x8_pad_to_img12x12():将8x8矩阵通过padding的方式变成12x12矩阵。

报错:A stack overflow in task main has been detected.
在 app_main 主函数中调用函数A,正常运行,再函数A之后加入函数B后,在函数A调用的时候出现了上述报错。
解决:增加 app_main 任务的栈空间大小。
点击齿轮 => 输入Main task stack size => 修改为10240(10K)
上面是一种方式,当然menuconfig的方式也是可以的。
手动修改sdkconfig是无效的。
参考:
[1]: idf v4.3 uses libmad,***ERROR*** A stack overflow in task main has been detected (IDFGH-6020) #7706 🚀
[2]: how to set app_main stack size? (IDFGH-2318) #2824 🚀
[3]: ESP32 之 ESP-IDF 教学(十八)—— 组件配置(KConfig) 🚀
报错:assert failed: tlsf_free heap_tlsf.c:872 (!block_is_free(block) && “block already marked as free”)
原因:在C代码改写成C++代码过程中,col_buf缓冲区在构造函数中申请堆空间,按正常来说在析构函数中释放堆空间,但是在LCD显示函数中释放掉了,所以第二次访问col_buf空间的时候报错了。
(本示例中没采用)
设想1:优化处理速度:采用双核运行,创建任务后不销毁,当处理完成一个任务后,将这个任务挂起,当下一次任务来的时候再恢复调度。
设想2:权重的计算可以提前算好,保存起来PSRAM,但是如果计算速度比PSRAM读写速度快,就没有必要。
参考:
[1]: 图像的放大:双三次插值算法(C++实现) 🚀
四、数据集获取
上位机程序(PC):get_data/get_data.py
下位机程序(ESP32):get_data/esp_dl_for_bixin

使用逻辑:
- LCD显示采集温度云图,若符合要求,按下键盘
任意键+回车; - 按下后,通过串口发送给ESP32,ESP32收到命令后,申请互斥锁,阻塞温度采集和插补计算,绘制当前温度云图,确认温度云图是否符合预期;
- 上位机输入标签或者放弃该数据,若输入数字标签(
0-背景,1-放大,2-捏住,3-减小),则将命令发送给ESP32,等待ESP32将点阵数据发送;若放弃,输入数字4,则将命令发送给ESP32,重新进行温度采样; - PC设备在收到串口数据后,复原图像,然后根据标签将数据和图片保存到对应目录下,文件名自动加1;(若上位机程序中途退出,下次运行时候,需要将当前的文件数量覆盖num1/num2/num3/num3变量)
- 然后重新开始第一步。
对于一组动作,当采集第一个动作,然后进行插补计算,之后的动作可能就没有采集到,只要单片机处理速度够快,这种漏采的帧数就较少。
数据保存到 txt 文件中,24行24列,由8行8列数据插补而来,其对应AMG8833的点阵序号为:
|---------------------------------------| | 58 | 59 | 60 | 60 | 61 | 62 | 63 | 64 | | ... | | ... | | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |数据采集过程中,动作可以考虑从不同角度、不同距离采集。
get_data.py 编程注意点:
- windows环境下路径为:D:/xxx/1.jpg
- 不允许一个串口被多个进程使用,所以如果使用多进程编程,串口在创建多进程前打开,子进程会继承父进程的所有文件描述符,那么就会出现报错。
- python语法中,除法 ‘ / ’ 总是返回一个浮点数,除法 ‘ // ’ 若除数和被除数存在浮点,则返回浮点,否则返回整数。
- for i in range(0, 24) # 0开始到23结束。
- image.putpixel 其中一个参数为xy,表示往图像xy位置写入RGB,所以代码中传入的参数为(j,i)。
- ser.flushInput() 的用途是再接收温度数据前,防止串口接收缓冲区中存在其它数据,导致接收错误数据,通过这个函数清空串口输入缓冲区。
对于插补结果上锁考虑:
- 插补的结果作为临界资源呢,防止将数据发送给PC过程中,数据被更改;
- 既然要发送,那么在发送过程中,不需要进行数据采集、插补计算、LCD显示,这个任务可以暂时停止,通过上锁的方式实现任务阻塞等待。
【get_data.py 报错】 fp = builtins.open(filename, “w+b”) PermissionError: [Errno 13] Permission denied: ‘c:/xxx/1.jpg’
原因:C盘读写权限较高,可以尝试将图片保存到D盘。
五、CNN模型训练
5.1、环境配置:Anconda3 | TF2.1.0 | Pycharm
Python:3.7(Anaconda3)
开发框架:TensorFlow 2.1.0
IDE:PyCharm
① Python安装:
Anaconda:python编译器和python包管理工具合在一起的一个软件。
安装配置教程:anaconda的安装和使用(管理python环境看这一篇就够了) 🚀
# 虚拟环境常用命令
conda info -e # 查看已经创建的所有虚拟环境
conda create -n xxx python=3.7 # 创建一个python3.7 名为xxx的虚拟环境
conda activate xxx # 切换/激活到xx虚拟环境
② TensorFlow安装:
// GPU 版本
pip install --upgrade tensorflow-gpu==2.0.0 -i https://pypi.tuna.tsinghua.edu.cn/simple// CPU 版本
pip install --upgrade tensorflow-cpu==2.1.0 -i https://pypi.tuna.tsinghua.edu.cn/simple
检测是否安装成功:切换到虚拟环境——>输入python ——> 载入tensorflow (import tensorflow as tf) ——> 查看版本号(print(tf.__version__))
对于英伟达CUDA安装配置环境相对较为繁琐,该模型较为简单,可以直接使用CPU进行训练。
③ PyCharm安装:
可以直接从 PyCharm 官网下载,但是可能由于 Anaconda 版本比较老,添加 python 解释器比较麻烦,所以这里采用这位博主提供的版本,具体软件安装、解释器添加教程可参考该篇博客 🚀。
5.2、生成数据集 | 预处理
由第四章中所构建的数据集,*.txt 文件中保存的数据为温度值,数据的排布格式如上所示,将*.txt文件中的数据变成数据集需要考虑以下事情:
- 【生成数据集】保存的数据按照分类分别保存在不同的目录下,所以需要统计数据集目录下所有的数据,将数据打乱,按照60%训练-20%测试-20%验证的比例划分。
- 【预处理】
*.txt文件中的数据类型为字符串,而训练时候所需要的数据为 float。
5.2.1、生成数据集:统计数据集 | 数据集随机化 | 数据集划分
- 创建数字编码表,即手势行为与数字的对应关系,
background=0,increase=1,pinch=2,reduce=3; - 遍历文件夹下的所有文件,以列表的方式保存所有文件的路径;
- 通过 random.shuffle 打乱顺序;
- 读取列表每个元素值然后拆解,由于原先存放的顺序以类别分别存放在对应的目录下,所以从拆解的结果可以知道该数据对应的标签,将【数据路径(*.txt)】和【标签】保存到 csv 文件中;
- 从 csv 文件中读出数据,按【数据路径】和【标签】分别保存到两个变量中,返回;
- 按照比例,以切片的方式,得到训练集、测试集、验证集,注意这里的数据还只是数据的路径,后面输入到神经网络需要将数据提取处出来,这部分工作交给预处理来完成。
目录结构:
---xxx|---dataset|---background|---1.jpg|---1.txt|---...|---increase|---1.jpg|---1.txt|---...|---pinch|---1.jpg|---1.txt|---...|---reduce|---1.jpg|---1.txt|---...|---tmp_data.csv|---geture_train.py
代码如下:
# 作用:将文件统计存入csv文件,然后读出csv文件内容
# root:数据集根目录
# filename:csv文件名
# name2label:类别名编码表
def load_csv(root, filename, name2label):if not os.path.exists(os.path.join(root, filename)):tmp_data = []for name in name2label.keys():# 'dataset\\increase\\1.txttmp_data += glob.glob(os.path.join(root, name, '*.txt'))# 200, 'dataset\increase\\1.txt'...print(len(tmp_data), tmp_data)random.shuffle(tmp_data)with open(os.path.join(root, filename), mode='w', newline='') as f:writer = csv.writer(f)for img in tmp_data: # 'dataset\\increase\\1.txt'name = img.split(os.sep)[-2]label = name2label[name]# 'dataset\\increase\\1.png', 1writer.writerow([img, label])print('written into csv file:', filename)# read from csv filetmp_data, labels = [], []with open(os.path.join(root, filename)) as f:reader = csv.reader(f)for row in reader:# 'dataset\\increase\\1.txt', 1tmp, label = rowlabel = int(label)tmp_data.append(tmp)labels.append(label)assert len(tmp_data) == len(labels)return tmp_data, labels# root:数据集根目录
def load_gesture(root, mode='train'):# 创建数字编码表name2label = {} # "sq...":0for name in sorted(os.listdir(os.path.join(root))):if not os.path.isdir(os.path.join(root, name)):continue# 给每个类别编码一个数字# 如: name2label['increase'] = 1name2label[name] = len(name2label.keys())print(name2label)# 读取Label信息# [file1,file2,], [3,1]images, labels = load_csv(root, 'tmp_data.csv', name2label)if mode == 'train': # 60%images = images[:int(0.6 * len(images))]labels = labels[:int(0.6 * len(labels))]elif mode == 'val': # 20% = 60%->80%images = images[int(0.6 * len(images)):int(0.8 * len(images))]labels = labels[int(0.6 * len(labels)):int(0.8 * len(labels))]else: # 20% = 80%->100%images = images[int(0.8 * len(images)):]labels = labels[int(0.8 * len(labels)):]return images, labels, name2label
5.2.2、预处理:string类型转换为float | 数据标准化 | one-hot encoding
预处理工作通过map的方式实现,将每个路径的 txt 加载进来替换掉,变成 txt 本身的内容,即 x x x 由原先路径,变成 [24, 24] 温度矩阵数据, y y y 为标签数据。
- 读取
*.txt中的数据,该数据为一个字符串; - 删除字符串中的
空格和\r\n字符,然后以这些字符,分割字符串,产生 576 个字符串,以列表的方式保存; - 将 576 个字符串转换为 float 类型,此时列表为 576 个 float 类型元素,shape为 [576];
- 将 [576] shape 转换为 [24, 24] shape,并进行扩展维度,将 [24, 24] shape 转变为 [24, 24, 1];
- 采用
最大最小标准化(Min-Max Normalization): x ′ = x − m i n ( x ) m a x ( x ) − m i n ( x ) x^{'}=\dfrac{x-min(x)}{max(x)-min(x)} x′=max(x)−min(x)x−min(x) (对 x x x 数据进行标准化处理); - 将 label 数据( y y y)转换为 tensor 类型,并进行
one-hot encoding处理(共 4 种类型,数字0,编码后变成 [1,0,0,0]); - 导出 x x x 和 y y y 两种 tensor 数据。
代码如下:
def preprocess(x, y): # 这个顺序和from_tensor_slices中的 x,y 对应# 读入txt数据data = tf.io.read_file(x)# 分割每行数据data = tf.strings.split(data) # "22.11 22.11 ...\r\n22.11 22.11...\r\n" => ["22.11" "22.11" ...]data = tf.strings.to_number(data) # ["22.11" "22.11" ...] (string) => [22.11 22.11 ...] (float32)data = tf.reshape(data, [24, 24]) # shape [576] => shape [24, 24]data = tf.expand_dims(data, axis=2) # shape [24, 24] => shape [24, 24, 1]# data数据归一化max_data = tf.reduce_max(data) # 标量min_data = tf.reduce_min(data) # 标量data = (data - min_data)/(max_data-min_data) # broadcat 张量维度扩张y = tf.convert_to_tensor(y)y = tf.one_hot(y, depth=4) # one-hot encodingreturn data, y
问题: Input 0 of layer conv2d is incompatible with the layer: expected ndim=4, found ndim=3. Full shape received: [24, 24, 1]
Conv2d的输入需要 4 维数据,所以预处理数据导出为[24, 24, 1],当训练的时候,经过数据集batch,Conv2d输入的数据为[b, 24, 24, 1],其中 b 就是 batch 的值。
参考:卷积计算输入要求 🚀
5.3、构建训练模型

模型参考:我复现了稚晖君的热成像手!语!识!别! 🚀
conv_layers = [# kernel_size:3x3, 卷积核个数:4layers.Conv2D(4, input_shape=(24, 24, 1), kernel_size=[3, 3], padding="valid", activation=tf.nn.relu), # [b, 24, 24, 1] => [b, 22, 22, 4]layers.MaxPool2D(pool_size=[2, 2], strides=2, padding='valid'), # [b, 22, 22, 4] => [b, 11, 11, 4]layers.Flatten(), # [b, 11, 11, 4] => [b, 484]layers.Dense(128, activation=tf.nn.relu), # [b, 484] => [b, 128]layers.Dense(64, activation=tf.nn.relu), # [b, 128] => [b, 64]layers.Dense(4, activation=tf.nn.softmax), # [b, 64] => [b, 4]
]def main():print(tf.__version__)train_images, train_labels, train_table = load_gesture('.\\dataset', 'train')val_images, val_labels, val_table = load_gesture('.\\dataset', 'val')train_db = tf.data.Dataset.from_tensor_slices((train_images, train_labels))train_db = train_db.map(preprocess).batch(300)val_db = tf.data.Dataset.from_tensor_slices((val_images, val_labels))val_db = val_db.map(preprocess).batch(300)# [b, 24, 24, 1] => [b, 4]network = Sequential(conv_layers)# network.build(input_shape=[None, 24, 24, 1])network.compile(optimizer=optimizers.Adam(lr=1e-4), # Adam优化器配置loss=tf.losses.CategoricalCrossentropy(from_logits=False), # 损失函数: 交叉熵metrics=['accuracy']) # 准确率计算# 打印网络信息network.summary()# 模型训练和验证network.fit(train_db, epochs=200, validation_data=val_db, validation_freq=1)
构建模型的时候,输入张量设置方式有多种,上面的是直接在模型conv_layers 中添加,或者可以使用model.build(input_shape=[None, 24, 24, 1]),这两种方式存在一定的差异,至少在ONNX模型转换的时候,第二种方式会报错:‘Sequential’ object has no attribute ‘output_names’;并且二者的ckpt权值文件也是不通用的,提示:Shapes (128,) and (64,) are incompatible。
5.4、训练结果保存和准确率
在构建模型的基础上,添加权值保存语句:
checkpoint_path = "gesture_train-{epoch:02d}.ckpt" # ckpt保存文件名, 占位符将会被epoch值和传入on_epoch_end的logs所填入
cp_callback = tf.keras.callbacks.ModelCheckpoint(filepath=checkpoint_path, # 保存文件名save_best_only=True, # 当设置为True时,将只保存在验证集上性能最好的模型save_weights_only=True, # 若设置为True,则只保存模型权重,否则将保存整个模型(包括模型结构,配置信息等)verbose=1, # 为1表示输出epoch模型保存信息,默认为0表示不输出该信息save_freq='epoch' # CheckPoint之间的间隔的epoch数)network.fit(train_db, epochs=200, validation_data=val_db, validation_freq=1, callbacks=[cp_callback])
训练结果准确率: 有部分数据集在采集过程中,距离传感器较远,相关特征不能很好的采集,所以验证集中若包含该数据,那么准确率不是很高,差不多在80%。若验证集中不包含该部分数据,准确率能到100%。

参考:
[1]: Tensorflow 2.1 完成权重或模型的保存和加载 🚀
[2]: ModelCheckpoint详解 🚀
5.5、ONNX模型转换和校准集导出
【ONNX模型】和【校准集】用于模型量化,校准集可以是训练集或验证集的子集,这里取训练集和验证集的集合作为校准集。
① ONNX模型转换:
这一步开始参考 ESP-DL 示例程序中的代码,下载:https://github.com/espressif/esp-dl 🚀(解压后目录名称为 esp-dl-master);
参考esp-dl-master\tools\quantization_tool\examples\tensorflow_to_onnx 提供的代码,做简单的修改,应用于本模型。
其余不用修改,注释掉main(),添加下列代码:
if __name__ == '__main__':# main()model = Sequential(conv_layers)model.load_weights('gesture_train-06.ckpt')model.summary()# export model to onnx formatspec = (tf.TensorSpec((None, 24, 24, 1), tf.float32, name="input"),) # 函数签名output_path = "gesture.onnx"model_proto, _ = tf2onnx.convert.from_keras(model, input_signature=spec, opset=13, output_path=output_path)# checker.check_graph(model_proto.graph)
- –opset 11:ONNX是一个不断发展的标准,它将添加更多的新操作并增强现有的操作,因此不同的opset版本将包含不同的操作,它们可能会有些不同 。这里参考示例程序,选择
opset 13。
② 校准集导出: 训练集 + 验证集
- .pkl数据文件 :Python中,Pickle模块将任意一个Python对象转换成一系统字节。
import pickle# obj: 序列化对象
# file: 保存到的待写入的文件对象
# protocol: 序列化模式,默认是0(最原始的人类可读版本)
pickle.dump(obj, file, protocol=None, *, fix_imports=True, buffer_callback=None)
pickle.load() # 反序列化
查看 ESP-DL 示例中的 pickle 文件(esp-dl-master\tools\quantization_tool\examples\mnist_test_data.pickle),本数据集参考该方式转换;
f = open('mnist_test_data.pickle', 'rb') # 打开pickle文件
info = pickle.load(f)
print('type', type(info), len(info))
print(info[0])
print(info[1])
f.close() # 关闭pickle文件
示例中的 pickle 文件的保存类型为list,info[0] 为图像数据,info[1] 为label数据。
注意, 保存类型需保存一致,如果采用字典类型,就会出现报错:‘str’ object has no attribute ‘astype’。
导出 pickle 文件:
# loc_train_db: 用于训练的数据集
# loc_val_db: 用于验证的数据集
def pkl_dataset_create(loc_train_db, loc_val_db):global pkl_train_savePath, pkl_cal_savePathloc_train_sample = [[], []]loc_val_sample = [[], []]for step, (x, y) in enumerate(loc_train_db):if step == 0:loc_train_sample[0] = xloc_train_sample[1] = yelse:loc_train_sample[0] = tf.concat([loc_train_sample[0], x], axis=0) # shape [300,24,24,1] + shape [300,24,24,1] => shape [600, 24, 24, 1]loc_train_sample[1] = tf.concat([loc_train_sample[1], y], axis=0) # shape [300,4] + shape [300, 4] => shape [600, 4]for step, (x, y) in enumerate(loc_val_db):if step == 0:loc_val_sample[0] = xloc_val_sample[1] = yelse:loc_val_sample[0] = tf.concat([loc_val_sample[0], x], axis=0)loc_val_sample[1] = tf.concat([loc_val_sample[1], y], axis=0)print('train:', 'x-', loc_train_sample[0].shape, 'y-', loc_train_sample[1].shape)print('val:', 'x-', loc_val_sample[0].shape, 'y-', loc_val_sample[1].shape)loc_train_sample[0] = tf.concat([loc_train_sample[0], loc_val_sample[0]], axis=0)loc_train_sample[1] = tf.concat([loc_train_sample[1], loc_val_sample[1]], axis=0)print('train:', 'x-', loc_train_sample[0].shape, 'y-', loc_train_sample[1].shape)pkl_train_db = [loc_train_sample[0].numpy(), loc_train_sample[1].numpy()]with open(pkl_train_savePath, 'wb') as f:pickle.dump(pkl_train_db, f, -1)print('pkl save done!')
函数参数传递进来后,进入取训练集的数据循环,若训练集总数为720,验证集总数为80,则:
- 第一次循环后,loc_train_sample[0] 的 shape 为 [300, 24, 24, 1],loc_train_sample[1] 的 shape 为 [300, 4];(300是因为训练的时候batchsize取300)
- 第二次循环后,loc_train_sample[0] 的 shape 为 [300, 24, 24, 1],loc_train_sample[1] 的 shape 为 [300, 4],和上一次循环结果进行合并;
- 第三次循环后,loc_train_sample[0] 的 shape 为[120, 24, 24, 1],loc_train_sample[1] 的 shape 为[120, 4],和上一次循环结果进行合并;
loc_train_sample[0][0]:第一张热成像图片数据(已经完成归一化的数据)
loc_train_sample[1][0]:第一张热成像label数据(已经完成one-hot)
上述数据的类型为 Tensor,存储为pickle后,在后续量化中出现:‘Your CPU supports instructions that this TensorFlow binary was not compiled to use: AVX2’(主机为AMD处理器)。因此这里使用loc_val_sample[0].numpy()语句,将Tensor类型转换为Numpy类型。
参考:
[1]: 手写图像数据集MNIST下载,处理为Numpy格式后存为.pkl格式 🚀
[2]: Python中 pickle 模块的 dump() 和 load() 方法详解 🚀
[3]: pickle — Python object serialization 🚀
六、模型量化与部署
6.1、模型量化
顺利到这一步,已经有如下文件:gesture_train.pickle 和 gesture.onnx。
参考 tools/quantization_tool/examples/example.py,示例目录如下,
---quantization_tool|---examples|---example.py|---optimizer.py|---windows|---calibrator.pyd|---calibrator_acc.pyd|---evaluator.pyd
复制上述文件,创建如下目录,
---quantization|---examples|---quantization.py(原example.py)|---gesture_train.pickle|---gesture.onnx|---optimizer.py|---windows|---calibrator.pyd|---calibrator_acc.pyd|---evaluator.pyd
① 进入虚拟环境
conda activate mt_for_esp
其中,mt_for_esp是<虚拟环境名称>。
② 安装 python 依赖包
pip install numba==0.53.1
pip install --upgrade onnx==1.9.0 # 环境中若已安装可以直接更新
pip install onnxruntime==1.7.0
pip install onnxoptimizer==0.2.6
③ ESP-DL组件下载:https://github.com/espressif/esp-dl 🚀
④ 进行修改quantization.py
1.修改pickle和onnx文件名;
2.删除test_images = test_images / 255.0, 数据集已经完成标准化;
3.calib_dataset = test_images[0:5000:50] => calib_dataset = test_images[0:1040:10];
4.batch_size = 10;
5.test_labels外层增加np.argmax, 原版本label没有one-hot, 这里 pickle 文件中label完成one-hot;
⑤ 输入 python quantization.py,输出如下文件和信息
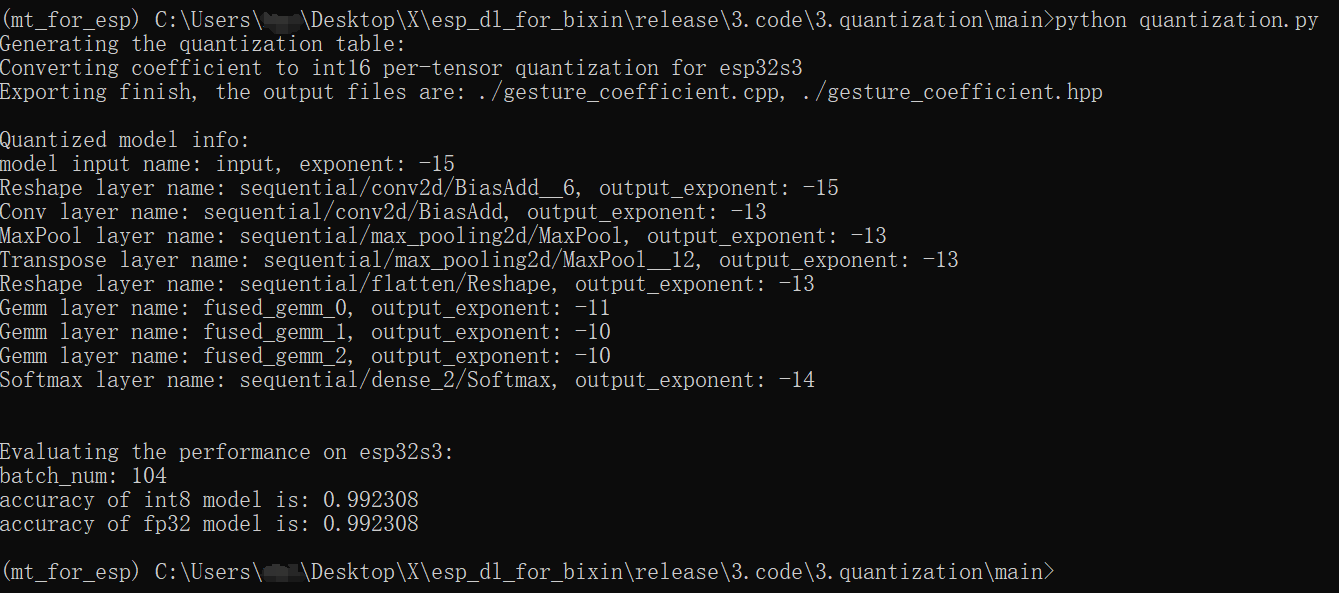
- gesture_cal.pickle
- gesture_coefficient.cpp
- gesture_coefficient.hpp
- gesture_optimized.onnx
参考:手动部署模型 🚀
6.2、ESP-DL组件添加
- ESP-DL组件下载:https://github.com/espressif/esp-dl 🚀(解压后目录名称为
esp-dl-master); - 创建组件,这里叫做
esp-dl; - 将
esp-dl-master/include目录下的文件复制到esp-dl组件中的include目录下;(有些文件不是很必要可以根据需求调整) - 将
esp-dl-master/lib/esp32s3目录下的libdl.a复制到esp-dl组件根目录下,组件结构如下;
---esp-dl|---include|---detect|---image|---layer|---math|---nn|---tool|---tvm|---typedef|---dl_define.hpp|---CMakeLists.txt|---libdl.a
- 修改
esp-dl组件下的CMakeLists.txt,如下
idf_component_register(SRCSINCLUDE_DIRS "include" "include/detect" "include/image" "include/layer" "include/math" "include/nn" "include/tool" "include/tvm" "include/typedef")
target_link_libraries(${COMPONENT_LIB} INTERFACE "${CMAKE_CURRENT_LIST_DIR}/libdl.a")
- (可选)到上面这一步就可以了,这里通过官方示例提供的 MNIST 测试添加
esp-dl组件是否编译正常,(example:esp-dl-master/tutorial/quantization_tool_example); - (可选)创建
model组件,文件结构如下:
---|---esp-dl|---model|---include|---mnist_coefficient.hpp|---mnist_model.hpp|---mnist_coefficient.cpp|---CMakeLists.txt
- (可选)
model组件下的CMakeLists.txt如下,该组件依赖于 esp-dl 组件,所以需要添加REQUIRES esp-dl,
idf_component_register(SRCS "mnist_coefficient"INCLUDE_DIRS "include"REQUIRES esp-dl)
- (可选)
main.app文件替换一下,替换前注意备份老版本,直接编译即可。(若运行的时候发现推理时间官方示例不同,可考虑将sdkconfig配置的同官方一致)
参考:使用 ESP-IDF 生成第三方的 .a 静态库并使用的流程 🚀
6.3、ESP 数据标准化(网络输入)
数据集为关于温度的矩阵(24x24),在训练的时候有一个预处理的过程,其中包含归一化,对于网络而言,输入是归一化后的结果,所以推理的时候,输入网络中的数据也应该是归一化后的数据。
// 寻找最大值和最小值
template<typename T>
void max_min(T *ptr, uint16_t count, T *max, T *min)
{*max = ptr[0];*min = ptr[0];for(int i=1; i<count; i++){if(*max < ptr[i]){*max = ptr[i];}if(*min > ptr[i]){*min = ptr[i];}}
}__attribute__((aligned(16))) float example_element[576];
__attribute__((aligned(16))) float tmp[576];int main(void){float max, min;max_min(example_element, &max, &min);for(int i = 0; i<576; i++){// normalizationtmp[i] = (example_element[i]-min)/(max-min);}
}
6.4、构建模型与优化
创建 model 组件,将 gesture_coefficient.cpp 和 gesture_coefficient.hpp 加入到该组件中,目录如下,
---model|---include|---gesture_coefficient.hpp|---gesture_model.hpp|---CmakeLists.txt|---gesture_coefficient.cpp
CmakeLists.txt 内容如下,
idf_component_register(SRCS "gesture_coefficient.cpp"INCLUDE_DIRS "include"REQUIRES esp-dl)
在 gesture_model.hpp 中完成模型构建,主要步骤如下,
- 模型类派生一个新类,由于量化时配置的为
int16量化,故模型以及之后的层均继承<int16_t>类型; - 将层声明为成员变量;
- 用构造函数初始化层;
- 实现
void build(Tensor<input_t> &input); - 实现
void call(Tensor<input_t> &input);
「 例如定义卷积层 “l2”,根据打印得知输出的指数位为 “-11”,该层的名称为 “fused_gemm_0”。您可调用
get_fused_gemm_0_filter()获取改卷积层权重,调用get_fused_gemm_0_bias()获取该卷积层偏差,调用get_fused_gemm_0_activation()获取该卷积层激活参数。」 —— from ESP
说明:
- 层的名称在哪里看?
- 有些层不需要模型参数,也就不需要存储模型参数,即在构造函数初始化层的时候,传入上述参数。

【注意】卷积输入shape的要求
通过量化工具,生成两个gesture_ccoefficient.cpp、gesture_coefficient.hpp,当中有一个参数是卷积核的shape(3,3,1,4),分别表示卷积核的宽度、高度、通道、卷积核数。
在conv2D.build中有一条语句:assert(input.shape[2]==filter.shape[2]),这对输入的shape提出了要求,而filter.shape[2]就是(3,3,1,4)中的1,所以input的shape为(24,24,1)。
【注意】softmax输入shape的要求
在Softmax.build中有一条语句:this->channel = input.shape[2],如果Softmax的input为[4](shape为1),那么input.shape[2]是越界访问,其值为随机数,所以input的维度必须是3维;若shape[2]为1,则Softmax只会取一个数据计算,所以input的shape为(1,1,4)。
按照量化工具优化后的网络模型,构建网络模型如下:
Reshape<int16_t> l1; // shape(24,24,1) => shape(24,24,1)
Conv2D<int16_t> l2; // shape(24,24,1) => shape(22,22,4)
MaxPool2D<int16_t> l3; // shape(22,22,4) => shape(11,11,4)
Transpose<int16_t> l4; // shape(11,11,4) => shape(11,11,4)
Reshape<int16_t> l5; // shape(11,11,4) => shape(1,484)
FullyConnected<int16_t, int16_t> l6; // shape(1,484) => shape(128)
FullyConnected<int16_t, int16_t> l7; // shape(128) => shape(64)
FullyConnected<int16_t, int16_t> l8; // shape(64) => shape(4)
Reshape<int16_t> l9; // shape(4) => shape(1,1,4)
Softmax<int16_t> l10; // shape(1,1,4) => shape(1,1,4)
优化:删除不必要的层
- l 1 l1 l1层在刚开始设置数据集的时候可以指定,所以这一层可以删除;
- l 4 l4 l4层之后的 l 5 l5 l5层直接打平,可以选择直接从 l 3 l3 l3到 l 5 l5 l5,所以删除 l 4 l4 l4;
l 8 l8 l8层之后可以直接得到预测结果,之所以用到softmax是在训练的时候用于构造损失函数,在推理的时候, l 8 l8 l8层输出结果可以查看当前类别可能性概率有多大,但是如果有一个新的类别,也可能出现类别可能性概率很大的情况,所以,可以考虑删除 l 9 l9 l9层和 l 10 l10 l10层。
优化后的模型如下:
Conv2D<int16_t> l1; // shape(24,24,1) => shape(22,22,4)
MaxPool2D<int16_t> l2; // shape(22,22,4) => shape(11,11,4)
Reshape<int16_t> l3; // shape(11,11,4) => shape(1,484)
FullyConnected<int16_t, int16_t> l4; // shape(1,484) => shape(128)
FullyConnected<int16_t, int16_t> l5; // shape(128) => shape(64)
FullyConnected<int16_t, int16_t> l6; // shape(64) => shape(4)
Reshape<int16_t> l7; // shape(4) => shape(1,1,4)
Softmax<int16_t> l8; // shape(1,1,4) => shape(1,1,4)
6.5、ESP硬件加速:修改sdkconfig配置
ESP32-S3的存储器如下:
-
内部存储器
- 片内ROM(384KB):存放系统底层软件的ROM代码,如一级引导程序。
- 片内SRAM(512KB):用于保存data段、bss段、堆栈等,以及部分text段(IRAM_ATTR修饰的函数)和ICache、DCache。
- RTC 快速存储器(8KB)
- RTC 慢速存储器(8KB)
- 片内PSRAM(8MB)
-
外部存储器
- 片外FLASH(16MB):用于保存二级引导程序(bootloader)和应用启动程序,加之链接脚本设置data/bss/(部分)text的地址空间为IRAM,所以在执行主函数之前需要完成data/(部分)text搬运。
外部存储器:CPU 借助高速缓存 (ICache/DCache) 来访问外部存储器,若地址能命中Cache,那么直接从Cache中取数据,若没有命中,则根据内存管理单元 (MMU) 中的信息把 CPU 指令总线或数据总线的地址变换为访问片外 flash 与片外 RAM 的实地址。
ICache最大为32KB,DCache最大为64KB。ICache 和 DCache 物理存储空间从片内SRAM获得,两种 Cache 均可映射到片外FLASH。

主要加速点:
-
提高DCache大小和访问速率:CPU通过SPI得到FLASH上的代码和数据的速度不及来自Cache(片内SRAM),根据CPU从FLASH取数据的原理,如果Cache足够大,那么地址命中率提高,有效减少片外FLASH访问。
-
提高SPI通讯速率:如果将SPI通讯速率提升,也能提高FLASH访问速度。
-
提高CPU主频:若CPU的主频足够快,理论上计算速度也足够快。(该网络主要性能瓶颈在存储器读写,所以160MHz提高到240MHz提升不明显)
sdkconfig主要配置如下:【idf.py menuconfig】
-
修改CPU主频,160MHz => 240MHz
- Component config —> ESP System Settings —> CPU frequency (160 MHz) —> (x) 240 MHz
-
修改片外FLASH
- SPI 模式,QIO:SPISerial flasher config —> Flash SPI mode (DIO) —> (x) QIO;
- SPI 速度,80MHz:SPISerial flasher config —> Flash SPI speed (80 MHz) ;
- FLASH 大小,4MB:SPISerial flasher config —> Flash size (2MB) —> (x) 4MB;
-
修改片内PSRAM
- SPI 模式为8线(Octal Mode):Component config —> ESP PSRAM —> Support for external, SPI-connected RAM —> SPI RAM config —> Mode (QUAD/OCT) of SPI RAM chip in use (Quad Mode PSRAM) —> (x) Octal Mode PSRAM
- SPI 频率为80MHz:Component config —> ESP PSRAM —> Support for external, SPI-connected RAM —> SPI RAM config —> Set RAM clock speed (40Mhz clock speed) —> (x) 80MHz
-
修改Data Cache
- 设置 DATA Cache size为64KB:Component config —> ESP System Settings —> Cache config —> Data cache size (32KB) —> (x) 64KB
- 设置 DATA Cache Line size为64B:Component config —> ESP System Settings —> Cache config —> Data cache line size (32 Bytes) —> (x) 64 Bytes
ICache 由16KB调整到32KB没怎么提升,所以依然配置为16KB。
【无softmax层】推理耗时:7020us

【有softmax层】推理耗时:7262us

参考:
[1]: ESP32/ESP32-S2 CPU加速建议 🚀
[2]: esp32 CPU时钟设置 240Mhz 🚀
[3]: 【ESP32-IDF】03-1 系统-内存管理 🚀
[4]: ESP32 程序的内存模型 🚀
七、应用逻辑设计
7.1、获取静止状态手势 | 定时器引入
① 获取静止状态手势程序逻辑:

② 定时器引入
对于ESP32-S3部署平台,该模型推理过程约7ms,这对于实际应用过程中,能保持较好的实时性,然而,由于该模型未采用RNN/LSTM等时序处理模型,所以只能针对某一个动作进行推理。试想一下,当手指由交叉状变成捏住状态,在这个改变过程中的某一个状态,可能被采集被推理为增大,但是实际应该是减小。基于此,通过引入定时器,当某个动作保持一定时间后,才对这个动作进行推理。
esp_timer 内部使用 52 位硬件定时器,对于 ESP32-S3 使用的是 SYSTIMER。其 API 集支持单次定时器和周期定时器、微秒级的时间分辨率。
定时器回调可通过以下两种方式调度:
ESP_TIMER_TASK:定时器回调函数是从高优先级的esp_timer任务中调度的,如果有优先级高于esp_timer的其他任务正在运行,则回调调度将延迟,直至esp_timer能够运行。ESP_TIMER_ISR:定时器回调由定时器中断处理程序直接调度。对旨在降低延迟的简单回调,建议使用此途径。
定时器可以以单次模式和周期模式启动。
- 单次模式:定时器计时结束,调用回调函数,随后停止;
- 周期模式:定时器计时结束,调用回调函数,随后重新开始,周而复始。
这里采用单次模式+ESP_TIMER_TASK配置,API接口如下:
esp_timer_create:创建定时器;esp_timer_delete:删除定时器;esp_timer_start_once:启动单次模式定时器;esp_timer_stop:停止定时器,下一次启动使用esp_timer_start_once;esp_timer_get_time:获取从boot开始时间,单位为微秒。
多任务中存在对临界资源的访问,这里通过【互斥锁】加以保护。
测试代码:
#include "esp_timer.h"esp_timer_handle_t oneshot_timer;
volatile char stillness_time_flag = 0; // 临界资源
SemaphoreHandle_t xSemaphore = NULL;
static const char* TAG = "example";static void oneshot_timer_callback(void* arg)
{xSemaphoreTake(xSemaphore, portMAX_DELAY);stillness_time_flag = 1;xSemaphoreGive(xSemaphore);
}const esp_timer_create_args_t oneshot_timer_args = {.callback = &oneshot_timer_callback,/* argument specified here will be passed to timer callback function */.arg = NULL,.name = "one-shot"};extern "C" void app_main(void)
{ESP_ERROR_CHECK(esp_timer_create(&oneshot_timer_args, &oneshot_timer)); //定时器xSemaphore = xSemaphoreCreateMutex(); //创建互斥量assert(xSemaphore != NULL);ESP_LOGI(TAG, "time since boot: %lld us", esp_timer_get_time());esp_timer_stop(oneshot_timer);usleep(2000000); 休眠2sesp_timer_start_once(oneshot_timer, 200000);ESP_LOGI(TAG, "time since boot: %lld us", esp_timer_get_time());
}
参考:
[1]: 高分辨率定时器(ESP 定时器) 🚀
[2]: esp_timer_example_main.c 🚀
7.2、交互方式选择:交互方式1
到这一步,通过上述动作设定,只需要最后静止的动作是训练的那些动作,就能完成捏住/增加/减小/松开的操作。
- 捏住状态: 选中操作对象;
- 捏住+上移:向右移动,选择操作对象;
- 捏住+下移:向左移动,选择操作对象;
- 交叉状态:操作对象增加;
- 松开状态:操作对象减小;
- 背景状态:取消对象选中。
7.3、交互方式选择:交互方式2
- 捏住=>交叉:操作对象增加;【判断逻辑同交互方式1】
- 交叉=>捏住:操作对象减小;
- 捏住=>松开:操作对象取消选择;【只需要判断最后一个动作即可】
- 松开=>捏住:选中操作对象;
- 捏住+上移:向右移动,选择操作对象;【判断逻辑同交互方式1】
- 捏住+下移:向左移动,选择操作对象。【判断逻辑同交互方式1】
如何区别【交叉=>捏住】和【松开=>捏住】
【交叉=>捏住】的操作序列可能为:1-1-2-...-2-2或者2-2-...-2-2-2
【松开=>捏住】的操作序列可能为:3-3-2-...-2-2或者2-2-...-2-2-2
【捏住=>捏住】的操作序列可能为:2-2-...-2-2-2
若操作序列为:2-2-...-2-2-2,如何区分?
- 这里考虑【交叉=>捏住】为减少,若前一组动作为【增加】,则判断当前操作为【减小】。
- 【松开=>捏住】和【捏住=>捏住】最后的状态为捏住,可不加以区分。
对于交互方式2,在运动过程中,边采集数据边推理,一些动作未加入训练集中训练,所以存在推理错误的情况,然而该组动作最后的操作结果依据这些操作序列得出,就可能导致判断出错。所所所所所以,上面的逻辑是理想的推理!
交互方式切换使用条件编译的方式进行选择:gesture_display.h文件下
#define INTERACTIVE_METHODS 1 // 1表示交互方式1, 2表示交互方式2
八、others
8.1、跑一下示例程序(MNIST)
- 下载 ESP-DL,可以使用以下命令,当然也可以直接在 github 🚀网页中下载;
git clone https://github.com/espressif/esp-dl.git
- 打开终端
ESP-IDF 5.0 CMD,进入tutorial/convert_tool_example文件夹:
C: # windows下切换到C盘
dir # 查看当前路径下的文件列表
cd ~/esp-dl/tutorial/convert_tool_example # 切换路径
- 使用以下命令设置目标芯片:(当前芯片为 esp32s3)
idf.py set-target esp32s3
-
将PSRAM模式设置为
Octal Mode PSRAM:终端输入idf.py menuconfig => Component config => ESP PSRAM => SPI RAM config => Moda (QUAD/OCT) of SPI RAM chip in use (Quad Mode PSRAM) => Octal Mode PSRAM -
烧录固件,打印结果
idf.py flash monitor
参考:获取 ESP-DL 并运行示例 🚀
8.2、数据集补充程序
对于分类任务,或多或少有些类别没有被添加到数据集,且当前网络无法做到正确推理,所以在前面的基础上写了个数据集补充程序。
程序分为:PC端上位机(python)和 ESP32端下位机(C/C++)
程序操作步骤:
- 运行上位机程序,马上重启ESP32;
- ESP32采集手势数据(只要一直在运动就不停止数据采集,当停止采集后,就开始推理,并将推理结果发送到上位机);
- 上位机中输入label(0-背景/1-增加/2-捏住/3-减小)或者放弃(4-不添加该数据);
- 下位机收到数字后,若为标签数值,则将手势数据上传,若为放弃,则丢弃数据;
- 然后,开始新一轮的循环。
相关文章:
【ESP32】手势识别实现笔记:红外温度阵列 | 双三次插值 | 神经网络 | TensorFlow | ESP-DL
目录 一、开发环境搭建与新建工程模板1.1、开发环境搭建与卸载1.2、新建工程目录1.3、自定义组件 二、驱动移植与应用开发2.1、I2C驱动移植与AMG8833应用开发2.2、SPI驱动移植与LCD应用开发2.3、绘制温度云图2.4、启用PSRAM(可选)2.5、画面动静和距离检测…...
No matching version found for @babel/compat-data@^7.23.5 处理
npm ERR! notarget No matching version found for babel/compat-data^7.23.5 处理 报错信息 npm WARN ERESOLVE overriding peer dependency npm ERR! code ETARGET npm ERR! notarget No matching version found for babel/compat-data^7.23.5. npm ERR! notarget In most …...

手持机|三防智能手机_4寸/5寸/6寸安卓系统三防手机PDA手持终端方案
随着科技的不断发展,三防手持机作为一种多功能设备,正逐渐在各行业得到广泛应用。这款手持机采用高性能处理器,支持高精度北斗定位和工业本安防爆功能,并具备IP67级防水防尘性能和1.5米防跌落能力。因此,它在仓储管理、…...

蓝桥杯算法心得——仙界诅咒(dfs)
大家好,我是晴天学长,搜索型的dfs,差点开二维矩阵了,仔细一想,没那么夸张啊,哈哈哈,需要的小伙伴可以关注支持一下哦!后续会继续更新的。💪💪💪 1…...
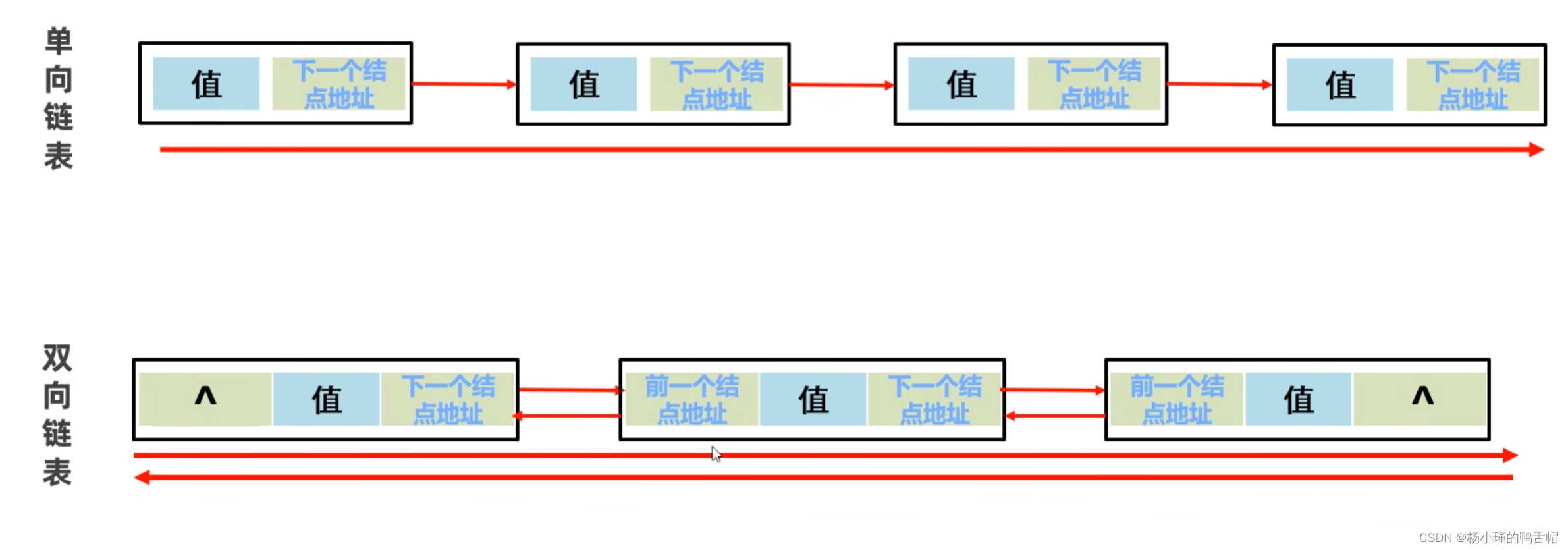
List集合,遍历,数据结构
一.List常见的方法: 二. List集合的遍历方式 除了 迭代器遍历 增强for遍历 Lambda表达式遍历,还有自己独有的普通for遍历,列表迭代器遍历 1.迭代器遍历 2.增强for遍历 3.Lambda表达式遍历 4.普通for遍历 5.列表迭代器遍历 列表迭代器相对于…...
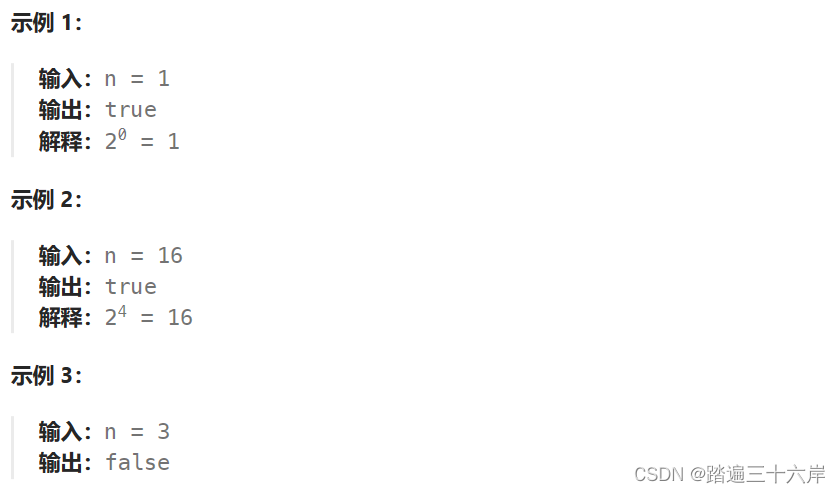
2的幂运算
2的幂 描述 : 给你一个整数 n,请你判断该整数是否是 2 的幂次方。如果是,返回 true ;否则,返回 false 。 如果存在一个整数 x 使得 n 2x ,则认为 n 是 2 的幂次方。 题目 : LeetCode 231.2的幂 : 231. 2 的幂 分…...

优先队列经典例题leetcode思路代码详解
目录 leetcode215题.数组中的第k个最大元素 leetcode347题.前k个高频元素 leetcode295题.数据流的中位数 对优先队列感兴趣的朋友可以去看我上一篇文章。 优先队列基础讲解-CSDN博客 leetcode215题.数组中的第k个最大元素 215. 数组中的第K个最大元素 - 力扣(…...

新型Python环境与依赖管理工具——pipenv
文章目录 pipenv介绍pipenv安装pipenv使用创建虚拟环境删除虚拟环境安装依赖查看包之间的依赖图卸载依赖在虚拟环境中执行命令shell环境下通过requirements.txt安装依赖导出requirements.txt文件查看虚拟环境的路径 pipenv介绍 pipenv可以看做是pip和virtualenv的组合体&#…...
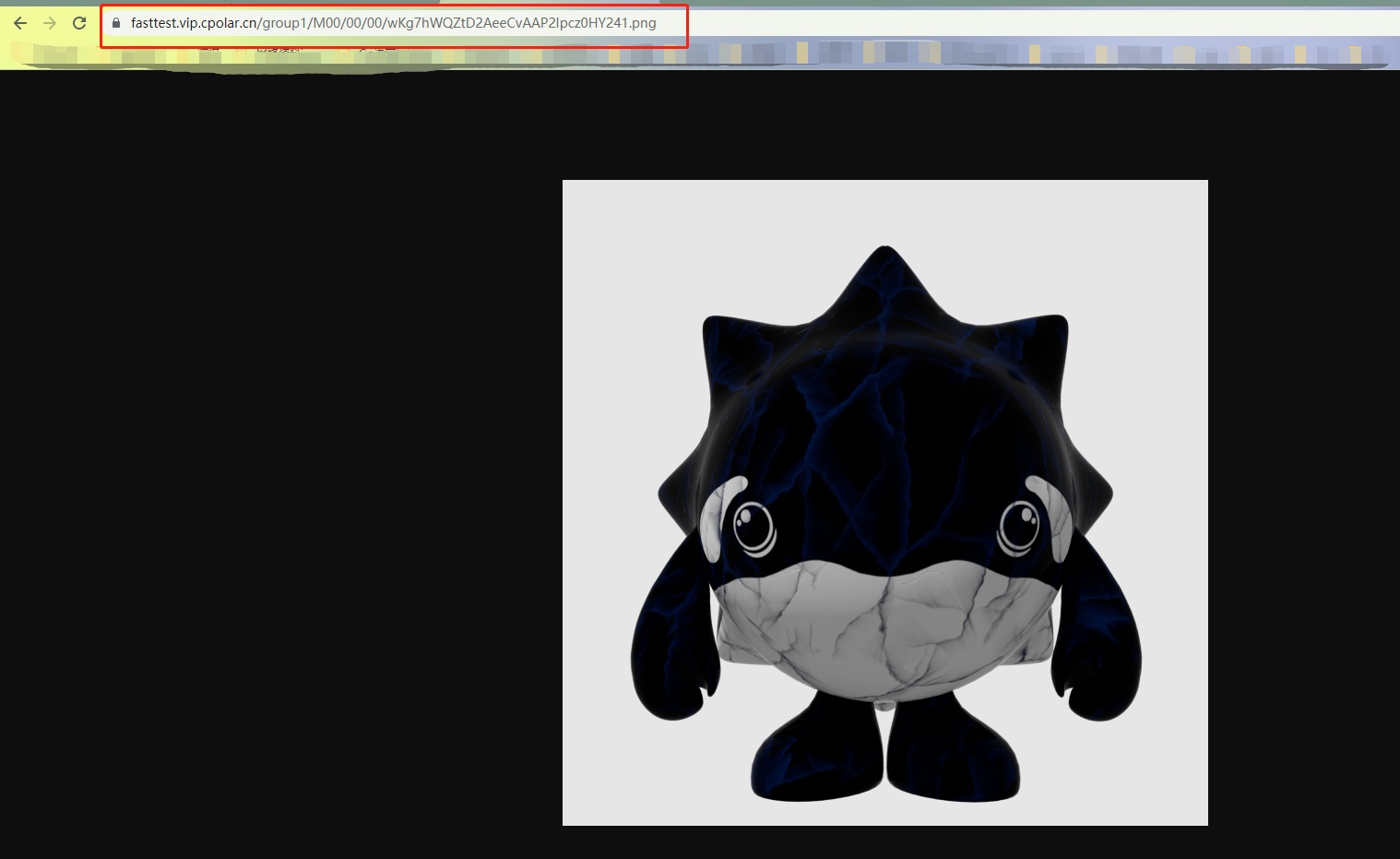
FastDFS+Nginx - 本地搭建文件服务器同时实现在外远程访问「内网穿透」
文章目录 前言1. 本地搭建FastDFS文件系统1.1 环境安装1.2 安装libfastcommon1.3 安装FastDFS1.4 配置Tracker1.5 配置Storage1.6 测试上传下载1.7 与Nginx整合1.8 安装Nginx1.9 配置Nginx 2. 局域网测试访问FastDFS3. 安装cpolar内网穿透4. 配置公网访问地址5. 固定公网地址5.…...

kendo-splitter动态分配分隔框大小
通过size方法,动态改变框大小,参考链接:https://docs.telerik.com/kendo-ui/api/javascript/ui/splitter/methods/size vue画面 <kendo-button type"primary" click"changePane">button</kendo-button><…...

网站提示不安全?
随着互联网的普及和发展,网络安全问题日益严重。黑客攻击、数据泄露、恶意软件等问题层出不穷,给企业和个人带来了巨大的损失。在这个背景下,确保网站安全显得尤为重要,而使用SSL证书是解决这些问题的有效措施。 什么是SSL证书&am…...

C# 泛型编译特性对性能的影响
C#作为一种强类型语言,具有丰富的泛型支持,允许开发者编写可以应对不同数据类型的通用代码。然而,在泛型编译时,针对结构和类作为泛型参数时,会对性能产生不同的影响。 泛型编译行为 在C#中,泛型编译行为取…...
11-30 JavaWeb
修改与删除操作 防止空指针异常 localhost:8080 -> 分页查询 修改流程:(先查后改(两个servlet)) 修改: 传用户id(用户id怎么得到 -> 循环一次得到一个user 对象 user对象里用user.getId()得到用户id) UpdateUserQueryServlet.java (…...
LCR 047. 二叉树剪枝 和 leetCode 1110. 删点成林 + 递归 + 图解
给定一个二叉树 根节点 root ,树的每个节点的值要么是 0,要么是 1。请剪除该二叉树中所有节点的值为 0 的子树。节点 node 的子树为 node 本身,以及所有 node 的后代。 示例 1: 输入: [1,null,0,0,1] 输出: [1,null,0,null,1] 解释: 只有红…...

Flutter笔记:路由观察者
Flutter系列 路由观察者 作者:李俊才 (jcLee95):https://blog.csdn.net/qq_28550263 邮箱 :291148484163.com 本文地址:https://blog.csdn.net/qq_28550263/article/details/134572181 目 录 1. 概述2. 路由…...
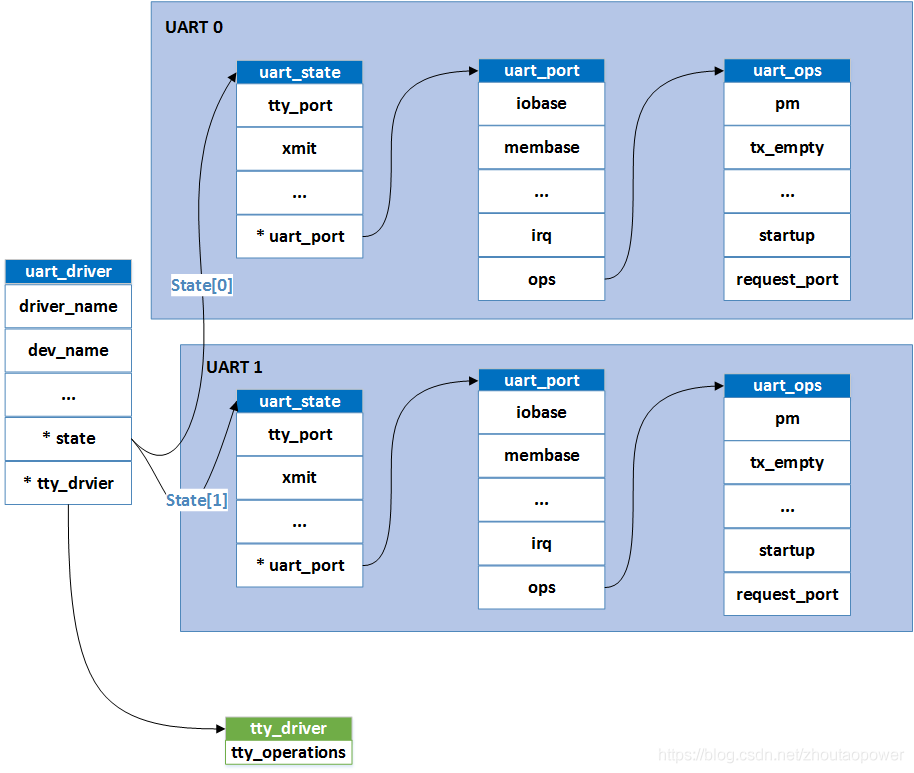
【驱动】串口驱动分析(三)-serial driver
简介 前两节我们介绍串口驱动的框架和tty core部分。这节我们介绍和硬件紧密相关的串口驱动部分。 UART驱动部分依赖于硬件平台,而TTY驱动和具体的平台无关。虽然UART部分依赖于平台,但是不管是哪个硬件平台,驱动的思路都是一致的ÿ…...
 constinit常量初始化)
(C++20) constinit常量初始化
文章目录 由来constinit 常量初始化常量初始化 ! 初始化常量初始化声明静态存储对象非初始化声明thread_local END 由来 在C多文件编译中会出现一个常见的问题,叫做静态初始化顺序问题。Static Initialization Order Fiasco。 比如现在有两个文件,其中…...

python实现获取aws route53域名信息
最近由于工作原因接触到aws的服务,我需要实时获取所有的域名信息,用于对其进行扫描,因此写了一个自动化爬取脚本 给需要的人分享。 1.基础准备 代码环境:python3 第三方库:boto3 (安装方法pip install…...

Linux_Linux终端常用快捷键
Linux命令行核心常用快捷键是一些在终端中使用的快捷键组合,用于提高命令行操作的效率。下面是这些快捷键的原理详细解释、使用场景解释 Ctrl A :将光标移动到命令行的开头。这个快捷键的原理是发送一个控制序列到终端,告诉终端将光标移动到…...

Neo4j 数据库管理 数据备份与恢复(头歌)
文章目录 第1关:数据备份与恢复任务描述相关知识数据备份数据导入 编程要求测试说明答案测试前准备Cypher 代码数据备份与导入 第1关:数据备份与恢复 任务描述 本关任务:熟练掌握数据备份与恢复。 相关知识 为了完成本关任务,…...

终极指南:如何用OpenPilot为您的爱车升级智能驾驶系统
终极指南:如何用OpenPilot为您的爱车升级智能驾驶系统 【免费下载链接】openpilot openpilot is an operating system for robotics. Currently, it upgrades the driver assistance system on 300 supported cars. 项目地址: https://gitcode.com/GitHub_Trendin…...

C251编译器变量分配与内存空间解析
1. C251编译器变量分配问题解析最近在Keil C251开发环境中遇到一个有趣的现象:编译器似乎将部分变量分配到了特殊功能寄存器(SFR)的内存空间。查看链接器生成的MAP文件时,发现如下信息:0000DDH 0000EAH 00000EH BYTE UNIT EDATA …...

巨噬细胞M1型与M2型的差异
巨噬细胞具有高度的功能可塑性,依据微环境信号的不同,可极化为功能迥异的M1型(经典活化)与M2型(替代活化)两大表型。两者在活化机制、代谢特征及生物学功能上呈现出显著的“阴阳”对立与平衡。1. 活化诱导与…...

入门吉他弹唱怎么选?面单琴技术对比:繁星AC-10 vs 雅马哈FG800
一、测评背景与技术参数1.1 测评样品信息桶型:GA桶 vs D桶面板:西提卡云杉纯单板 vs 西提卡云杉背侧板:桃花芯木纯单板 vs 那都木/奥古曼合板琴颈:奥古曼 vs 那都木指板:玫瑰木 vs 玫瑰木有效弦长:650mm vs…...

从能算到秒杀:单词拆分与「能否拼出来」的判定艺术
如果说 完全平方数 是在算「最少几个数」,零钱兑换 是在算「最少几枚硬币」,那 139. 单词拆分 就是在考你:一个字符串,到底能不能被“拼”出来?这也是我第一次意识到:很多 DP 题,其实是在…...
调用ChatGPT API的工业级封装方案)
别再用curl硬刚了!3种主流语言(Python/Node.js/Java)调用ChatGPT API的工业级封装方案
更多请点击: https://kaifayun.com 第一章:ChatGPT API调用方法概览与工业级封装核心原则 ChatGPT API 作为 OpenAI 提供的标准化接口,支持文本生成、对话管理、函数调用等多种能力。其核心调用方式基于 RESTful HTTP 请求,需通过…...

Perplexity反义词≠低困惑度?——斯坦福NLP实验室内部培训材料首次公开的4层认知陷阱
更多请点击: https://kaifayun.com 第一章:Perplexity反义词≠低困惑度?——认知错位的根源剖析 Perplexity(困惑度)是语言模型评估中被广泛误读的核心指标。许多人直觉认为“低困惑度即好模型”,甚至将“…...

破解安卓设备标识获取难题:Android_CN_OAID的全栈兼容解决方案
破解安卓设备标识获取难题:Android_CN_OAID的全栈兼容解决方案 【免费下载链接】Android_CN_OAID 安卓设备唯一标识解决方案,可替代移动安全联盟(MSA)统一 SDK 闭源方案。包括国内手机厂商的开放匿名标识(OAID…...

NoFences:免费开源的Windows桌面整理神器,让杂乱图标瞬间归位
NoFences:免费开源的Windows桌面整理神器,让杂乱图标瞬间归位 【免费下载链接】NoFences 🚧 Open Source Stardock Fences alternative 项目地址: https://gitcode.com/gh_mirrors/no/NoFences 还在为Windows桌面上堆积如山的图标而烦…...

【设计模式 13】命令:覆水能收
这一课讲命令模式。什么在变:决策需要记录、排队、撤销。怎么挡:把决策封装成命令对象,可执行可回滚。林衍那次决策失误,后来集团内部管它叫"黑色十月"。 起因是赵闯带回来一条消息:一家新晋竞争对手拿到了十…...