多传感器融合SLAM在自动驾驶方向的初步探索的记录
1. VIO的不可观问题
现有的VIO都是解决的六自由度的问题, 但是对于行驶在路面上的车来说, 通常情况下不会有roll与z方向的自由度, 而且车体模型限制了不可能有纯yaw的变换. 同时由于IMU在Z轴上与roll, pitch上激励不足, 会导致IMU在初始化过程中尺度不准以及重力方向估计错误, 这是很要命的. 所以我想通过融合车体上的其他传感器来解决这方面的问题.
2. 尝试1, 轮速计的加入
轮速计用来解决IMU+单目初始化尺度不确定的问题. 用阿克曼模型计算出车的速度向量和角速度向量, 也做一个预积分, 把轮速计预积分的结果放进ldlt中计算求出尺度. 在实验中, 如果不融入轮速计, 同样地图每次结果尺度都有差别, 即使标定了很多次IMU噪声和零偏都不行. 这里有个问题是, IMU的噪声会不会因为车发动机震动而变化, 有懂的老哥可以交流一下.
轮速计融入初始化可以解决尺度问题, 剩下的就是融进优化问题了, 这部分有很多论文都做过.
3. 平面约束的加入
在长时间的行驶中, 发现融入轮速计后还是会出现在Z轴上的变化, 初步分析应该是IMU导致的, 加入平面约束是想把Z轴上的跳动抹掉. 这块工作还在进行中, 现有的方法是把车体坐标与世界坐标的Z轴上的平移量加入优化, 优化目标是趋近于0. 但实测效果不好.
待补充…
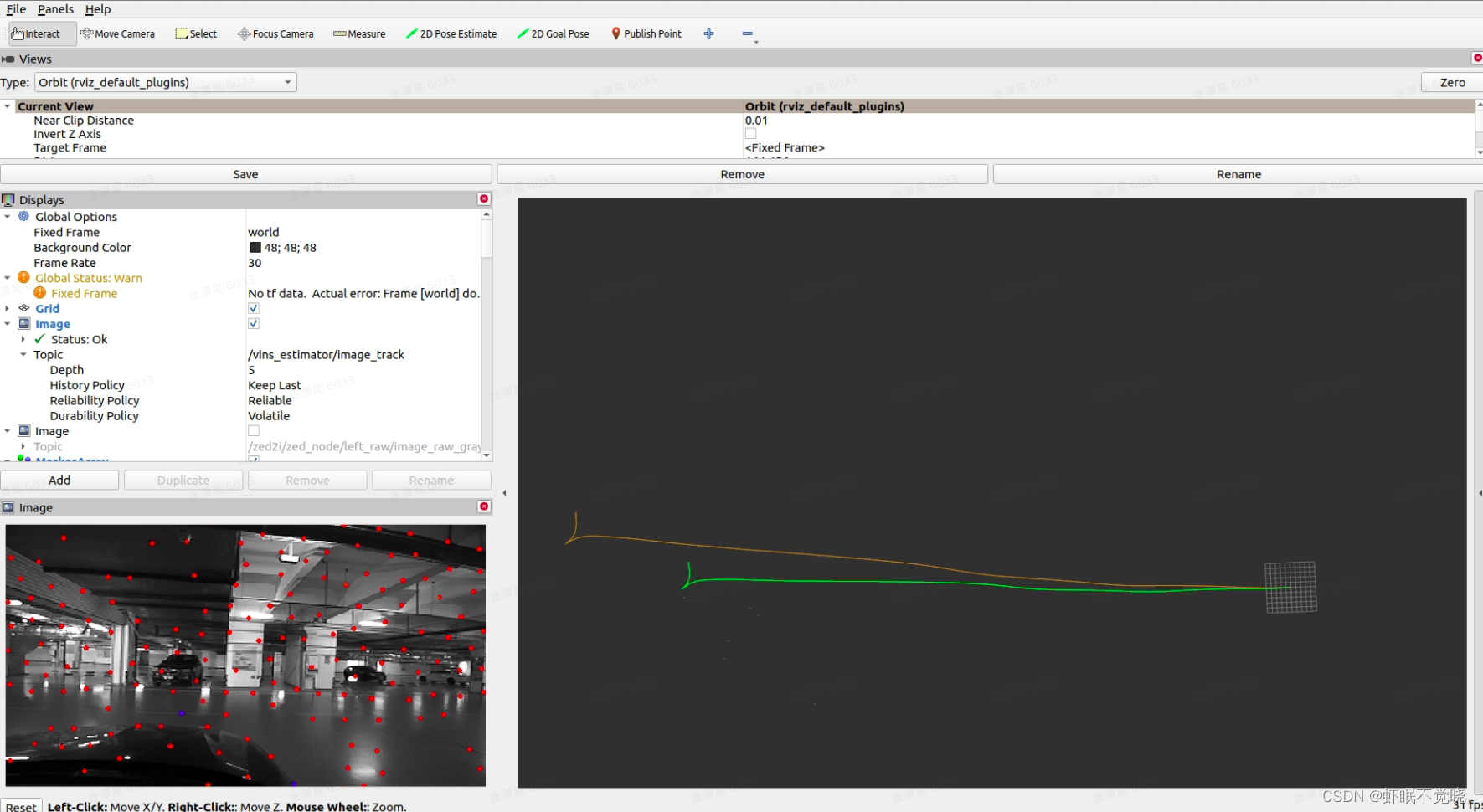
以下是现有的室内测试结果, heading和尺度方面的问题似乎是解决了
对比没有加入平面约束和轮速计的结果
有平面与轮速计约束:
没有轮速与平面约束
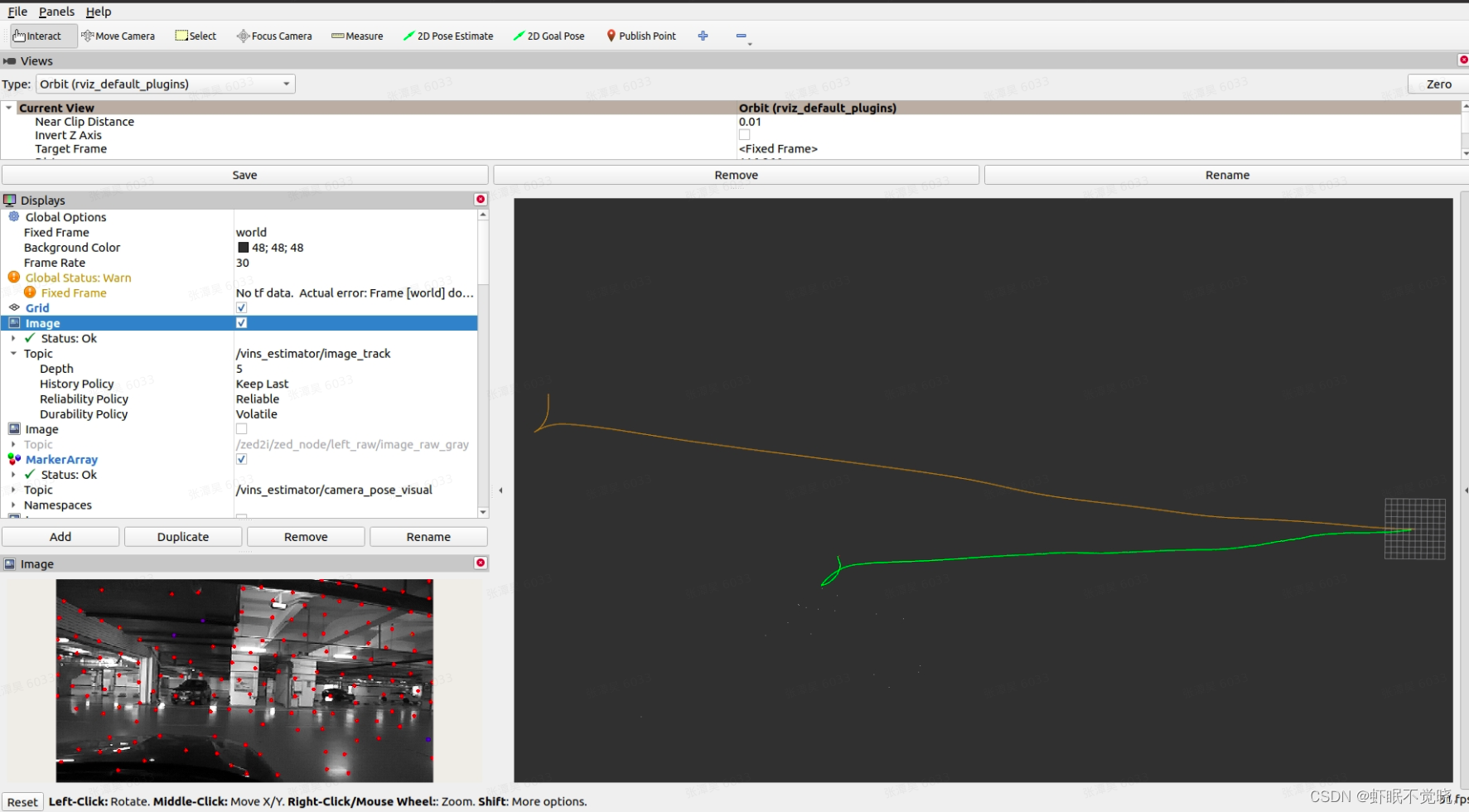
灰色的是用纯轮速计推出来的, 绿的为vio或者viw推的, 可以看到差距还是挺大的
相关文章:
多传感器融合SLAM在自动驾驶方向的初步探索的记录
1. VIO的不可观问题 现有的VIO都是解决的六自由度的问题, 但是对于行驶在路面上的车来说, 通常情况下不会有roll与z方向的自由度, 而且车体模型限制了不可能有纯yaw的变换. 同时由于IMU在Z轴上与roll, pitch上激励不足, 会导致IMU在初始化过程中尺度不准以及重力方向估计错误,…...

ffmpeg与opencv-python处理视频
安装 opencv pip install opencv-pythonFFmpeg 1.下载 FFmpeg 访问FFmpeg官方网站。选择 “Windows builds from gyan.dev” 链接,这会带您到一个包含最新版本 FFmpeg Windows 构建的页面。选择一个适合您系统的版本(例如,32位或64位&…...

java 操作git
实现功能:借助jgit实现拉取文件,并返回文件路径清单 <!-- 依赖库 版本号有自行选择,只是需要注意支持的jdk版本即可,我使用的是jdk1.8--> <dependency><groupId>org.eclipse.jgit</groupId><artif…...

Linux 导入、导出 MySQL 数据库命令
一、导出数据库 1、导出完整数据:表结构数据 mysqldump -u用户名 -p 数据库名 > 数据库名.sql 举例:以下命令可以导出 abc 数据库的数据和表结构 /usr/local/mysql/bin/mysqldump -uroot -p abc > abc.sql2、只导出表结构 mysqldump -u用户名 -p…...
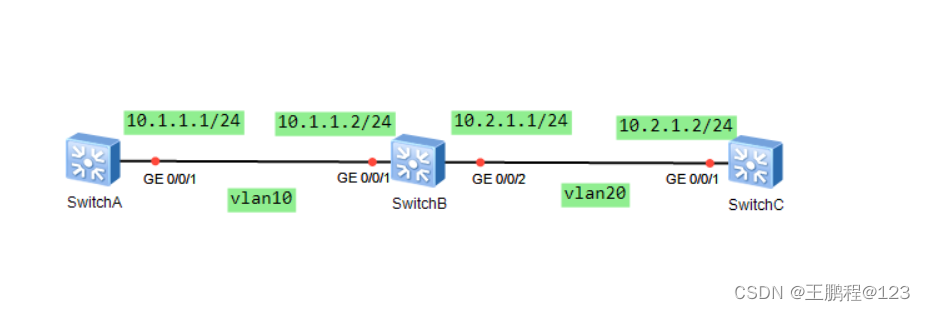
华为数通---BFD多跳检测示例
定义 双向转发检测BFD(Bidirectional Forwarding Detection)是一种全网统一的检测机制,用于快速检测、监控网络中链路或者IP路由的转发连通状况。 目的 为了减小设备故障对业务的影响,提高网络的可靠性,网络设备需要…...

AWS 日志分析工具
当您的网络资源托管在 AWS 中时,需要定期监控您的 AWS CloudTrail 日志、Amazon S3 服务器日志和 AWS ELB 日志等云日志,以降低任何潜在的安全风险、识别严重错误并确保满足所有合规性法规。 什么是 Amazon S3 Amazon Simple Storage Serviceÿ…...
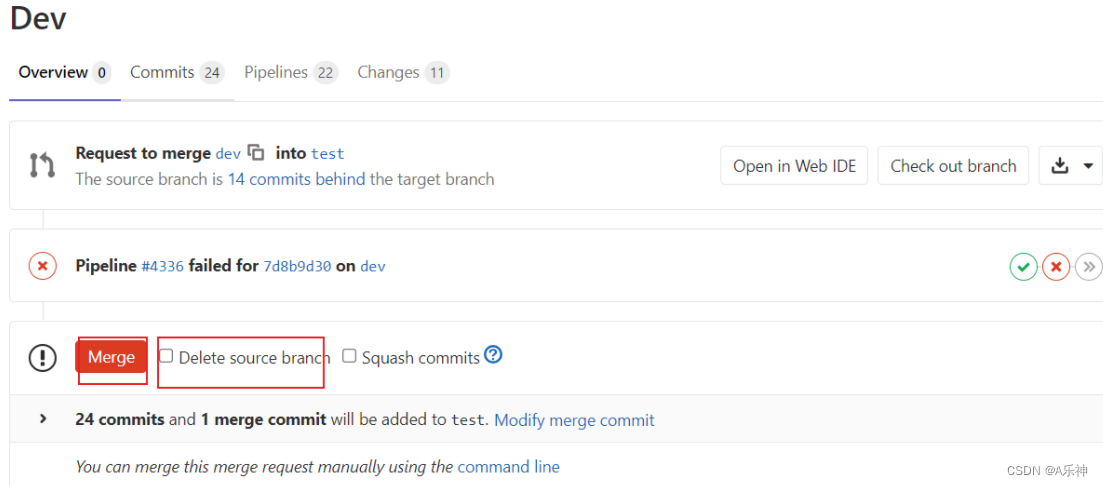
gitLab 和Idea分支合并
以下二选1即可完成分支合并建议第一种简单有效 Idea合并方式 切换到被合并的分支,如我想把0701的内容合并到dev,切换到dev分支,然后再点击merge然后选择要合并的分支,即可,此时git上的代码没有更新只是把代码合到本地需要pull才…...
关于 mapboxgl 的常用方法及效果
给地图标记点 实现效果 /*** 在地图上添加标记点* point: [lng, lat]* color: #83f7a0*/addMarkerOnMap(point, color #83f7a0) {const marker new mapboxgl.Marker({draggable: false,color: color,}).setLngLat(point).addTo(this.map);this.markersList.push(marker);},…...

C语言——二级指针
指针变量也是变量,是变量就有地址,那么指针变量的地址存放在哪里?——这就是二期指针 int a 10;int *pa &a;int **ppa &pa;//a的地址存放在pa中,pa的地址存放在ppa中。 //pa是一级指针,ppa是二级指针。 对…...

股市复苏中的明懿金汇:抓住新机遇
2023年对于明懿金汇来说是充满挑战与机遇的一年。面对复杂多变的市场环境,明懿金汇展现了其对市场趋势的敏锐洞察和卓越的策略适应能力。以下是该公司在2023年的主要投资策略和市场适应方式的详细分析。 随着2023年中国股市迎来反弹,明懿金汇迅速调整了…...

Spacemesh、Kaspa和Chia的全面对比!
当今区块链领域,PoST(Proof of Space and Time)共识算法引领着一股新的技术浪潮。在这个热潮下,Chia项目作为PoST共识机制的经典项目,和目前算力赛道备受瞩目的Kaspa项目,都是不可忽视的存在。虽然这两个项…...
【HTML语法】
HTML语法 1. HTML语法1.1 HTML编辑器1.2 HTML模板1.3 标签示例1.4 常见的HTML标签1.51.61.71.81.91.101.11 学习网站:https://www.runoob.com/html/html-tutorial.html 1. HTML语法 HTML(全称 Hypertext Markup Language,超文本标记语言&…...

ROS报错:RLException:Invalid roslaunch XML Syntax: mismatched tag:
运行roslaunch文件提示: RLException:Invalid roslaunch XML Syntax: mismatched tag: line 45, column 2 The traceback for the exception was written to the log file. j 解决办法: line45 行多了标签:</node> 另外…...

C语言实现快速排序
完整代码: #include<stdio.h>//用第一个元素将待排序序列划分成左右两个部分,返回排序后low的位置,即枢轴的位置 int partition(int arr[],int low,int high){//让待排序序列中的第一个元素成为基准int pivotarr[low];//lowhigh代表一…...

ChatGPT对于当今的社会或科技发展有何重要性?
ChatGPT对于当今社会和科技发展的重要性在于: 促进社交交流:ChatGPT可以为人们提供全天候的在线聊天服务,连接人与人之间的沟通交流,改善社交沟通方式。 提高有效性和效率:人们可以通过ChatGPT获得快速和精确的信息&a…...

宝塔是可以切换mongodb版本的
在软件商店,搜索monggodb,点击设置。点击第三个标签版本切换即可。但是前提要删除所有非系统数据库。 删除数据库方法: 要在 MongoDB 中删除一个数据库,可以使用 dropDatabase() 命令。请注意,在执行此操作之前&#x…...

16、XSS——会话管理
文章目录 一、web会话管理概述1.1 会话管理1.2 为什么需要会话管理?1.3 常见的web应用会话管理的方式 二、会话管理方式2.1 基于server端的session的管理方式2.2 cookie-based的管理方式2.3 token-based的管理方式 三、安全问题 一、web会话管理概述 1.1 会话管理 …...
)
稀疏矩阵的操作(数据结构实训)
题目: 标准输入输出 题目描述: 稀疏矩阵可以采用三元组存储。 输入: 输入包含若干个测试用例,每个测试用例的第一行为两个正整数m,n(1<m,n<100),表示矩阵的行数和列数,接下来m行,每行n个整数,表示稀疏…...

sqlite - sqlite3_exec - c++回调函数的处理
文章目录 sqlite - sqlite3_exec - c回调函数的处理概述笔记回调赋值实现用到的数据结构回调分发函数的实现具体的回调处理sqlite3_exe执行完后, 行集的具体处理END sqlite - sqlite3_exec - c回调函数的处理 概述 以前给客户写了个小程序, 处理sqlite执行sql时, 给定回调, 等…...
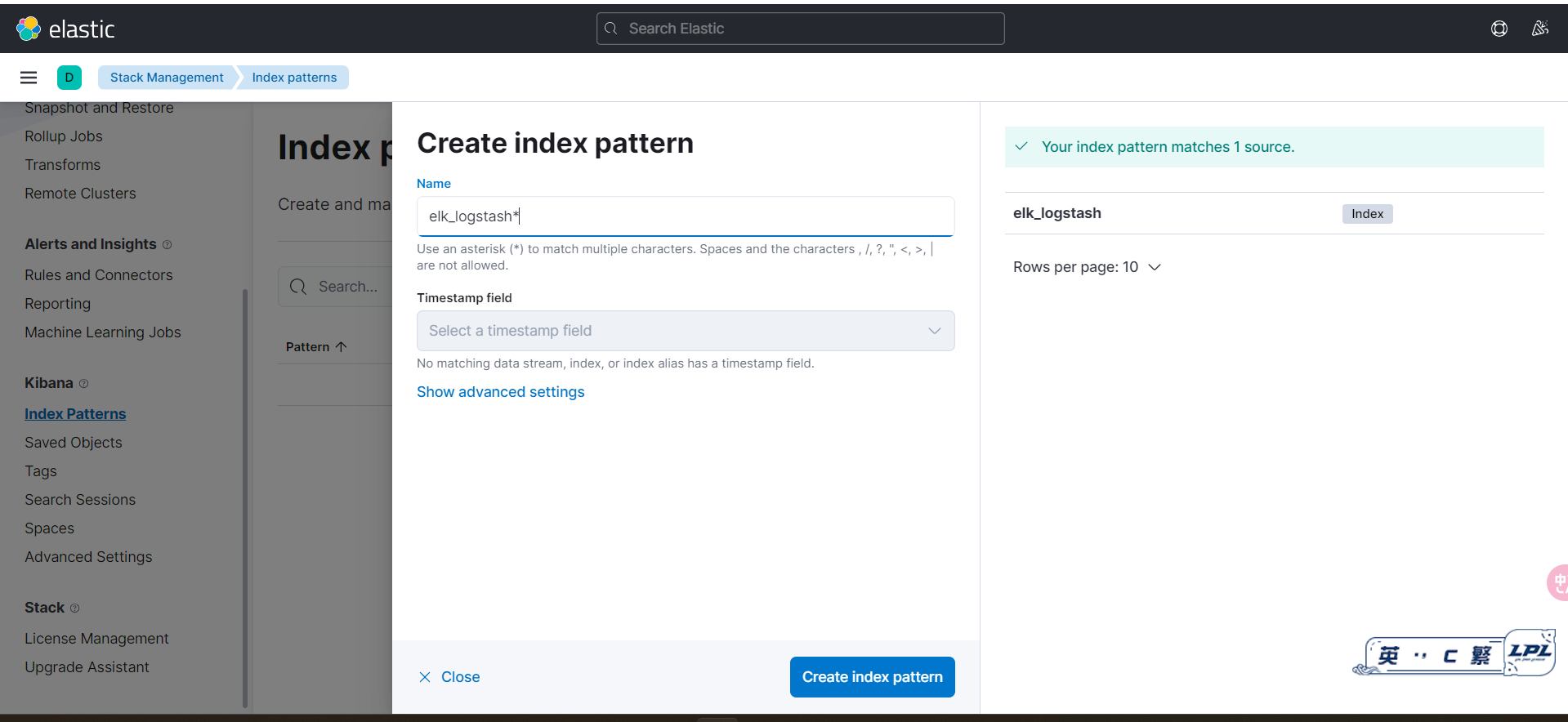
docker搭建logstash和使用方法
配置logstash 查询下载镜像【固定和elasticsearch一样的版本】 [roothao ~]# docker search logstash NAME DESCRIPTION STARS OFFICIAL AUTOMATED logstash …...

开源无人机任务控制系统:微服务架构与自主飞行开发实战
1. 项目概述:一个开源的无人机任务控制系统如果你和我一样,玩过一段时间无人机,从最初的“一键起飞”到后来想实现一些自动化的航线飞行,你可能会发现,市面上成熟的任务规划软件(比如DJI的Pilot 2或一些地面…...
嵌入式LED色彩校正:Gamma原理与Arduino NeoPixel实战
1. 项目概述:为什么你的NeoPixel灯带颜色总是不对劲?如果你玩过像NeoPixel、WS2812B这类可编程LED灯带,并且尝试过自己调色,大概率遇到过这样的困惑:你在代码里设定了一个“橙色”——比如红色满值255,绿色…...

Shinkai Node:构建自主AI Agent的去中心化操作系统内核
1. 项目概述:Shinkai Node 是什么,以及它为何值得关注最近在跟一些做AI应用开发的朋友聊天,发现大家普遍面临一个痛点:如何让AI Agent(智能体)真正“活”起来,拥有持续的记忆、自主的行动能力&a…...

嘎嘎降AI和PaperRR深度对比:2026年学术期刊SCI论文降AI性能完整评测报告
嘎嘎降AI和PaperRR深度对比:2026年学术期刊SCI论文降AI性能完整评测报告 总有人问我选哪个降AI工具,这篇文章把主流的几款对比清楚。 综合推荐嘎嘎降AI(www.aigcleaner.com),4.8元,99.26%达标率。不同需求…...

体育科学论文降AI工具免费推荐:2026年体育科学研究毕业论文知网AIGC超标4.8元亲测达标完整指南
体育科学论文降AI工具免费推荐:2026年体育科学研究毕业论文知网AIGC超标4.8元亲测达标完整指南 帮同学选过降AI工具,综合价格、效果、保障来看,推荐嘎嘎降AI(www.aigcleaner.com)。 4.8元,达标率99.26%&a…...

【深度解析】Qwen 3.6 vs Gemma 4:本地大模型时代,如何选对“日常开发模型”
摘要: 开源权重模型正在快速逼近闭源模型能力边界。本文结合 Qwen 3.6 与 Gemma 4 的实际案例,从架构、上下文、显存、基准测试到落地场景,拆解本地大模型选型逻辑,并给出可直接运行的 Python 调用示例。 背景介绍 近两年…...

为什么你需要Markdown Viewer:浏览器中预览Markdown文件的终极解决方案
为什么你需要Markdown Viewer:浏览器中预览Markdown文件的终极解决方案 【免费下载链接】markdown-viewer Markdown Viewer / Browser Extension 项目地址: https://gitcode.com/gh_mirrors/ma/markdown-viewer 还在为浏览器无法直接打开.md文件而烦恼吗&…...

工业智能化落地实践:从边缘AI到预测性维护的ST方案整合
1. 项目概述:一场工业智能化的深度对话最近刚参加完ST(意法半导体)的工业峰会回来,感触颇深。这场活动与其说是一场展会,不如说是一场关于“工业智能化如何落地”的深度行业对话。作为一家长期深耕工业通讯、物联网与嵌…...

从CTF解题到IoT固件分析:我是如何把‘水土不服’的binwalk调教成Windows主力工具的
从CTF解题到IoT固件分析:我是如何把‘水土不服’的binwalk调教成Windows主力工具的 第一次参加CTF比赛时,我遇到了一个奇怪的压缩包。解压后是一堆看似随机的二进制数据,队友在Linux下轻车熟路地敲下binwalk -e命令,瞬间提取出了…...

2026届最火的降AI率神器解析与推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 人工智能生成内容逐渐普及起来,信息质量以及真实性面临到严峻挑战。各类平台加之…...