在imx6ull中加入ov5640模块
本来觉得是一件很简单的事情但是走了很多的弯路,记录一下调试过程。
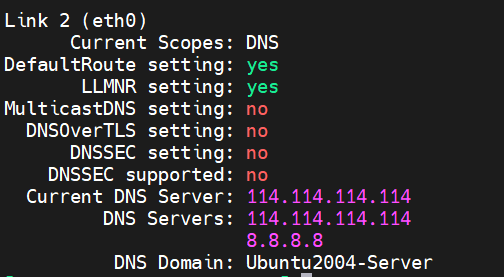
- 先使用正点原子提供的出厂内核把摄像头影像调试出来,然后cat /dev/video1,看一下video1牵扯到哪些模块,可以看到需要ov5640_camera.ko和 mx6s_capture.ko这两个模块。
root@ATK-IMX6U:/mnt/mxc/subdev# cat /dev/video1
[ 234.765777] ------------[ cut here ]------------
[ 234.770851] WARNING: CPU: 0 PID: 1362 at drivers/media/v4l2-core/videobuf2-core.c:2822 __vb2_init_fileio+0x124/0x31c()
[ 234.783858] Modules linked in: ov5640_camera mx6s_capture icm20608(O)
[ 234.791720] CPU: 0 PID: 1362 Comm: cat Tainted: G W O 4.1.15 #1
[ 234.798753] Hardware name: Freescale i.MX6 Ultralite (Device Tree)
[ 234.805019] [<80015dbc>] (unwind_backtrace) from [<80012748>] (show_stack+0x10/0x14)
[ 234.812783] [<80012748>] (show_stack) from [<8081e1ec>] (dump_stack+0x84/0xc4)
[ 234.820061] [<8081e1ec>] (dump_stack) from [<80036bc0>] (warn_slowpath_common+0x80/0xb0)
[ 234.828196] [<80036bc0>] (warn_slowpath_common) from [<80036c8c>] (warn_slowpath_null+0x1c/0x24)
[ 234.837019] [<80036c8c>] (warn_slowpath_null) from [<80549ac8>] (__vb2_init_fileio+0x124/0x31c)
[ 234.845760] [<80549ac8>] (__vb2_init_fileio) from [<8054a51c>] (__vb2_perform_fileio+0x498/0x5e4)
[ 234.854685] [<8054a51c>] (__vb2_perform_fileio) from [<8054a680>] (vb2_read+0x18/0x20)
[ 234.862625] [<8054a680>] (vb2_read) from [<7f004c70>] (mx6s_csi_read+0x4c/0x64 [mx6s_capture])
[ 234.871303] [<7f004c70>] (mx6s_csi_read [mx6s_capture]) from [<80532818>] (v4l2_read+0x60/0x98)
[ 234.880046] [<80532818>] (v4l2_read) from [<800e9c90>] (__vfs_read+0x20/0xd4)
[ 234.887220] [<800e9c90>] (__vfs_read) from [<800ea428>] (vfs_read+0x7c/0x104)
[ 234.894392] [<800ea428>] (vfs_read) from [<800eacc8>] (SyS_read+0x44/0x9c)
[ 234.901280] [<800eacc8>] (SyS_read) from [<8000f480>] (ret_fast_syscall+0x0/0x3c)
[ 234.915272] —[ end trace ed21faed4da06c6d ]—
以下调试都是在nxp原厂内核基础上进行的, 这是为了学习
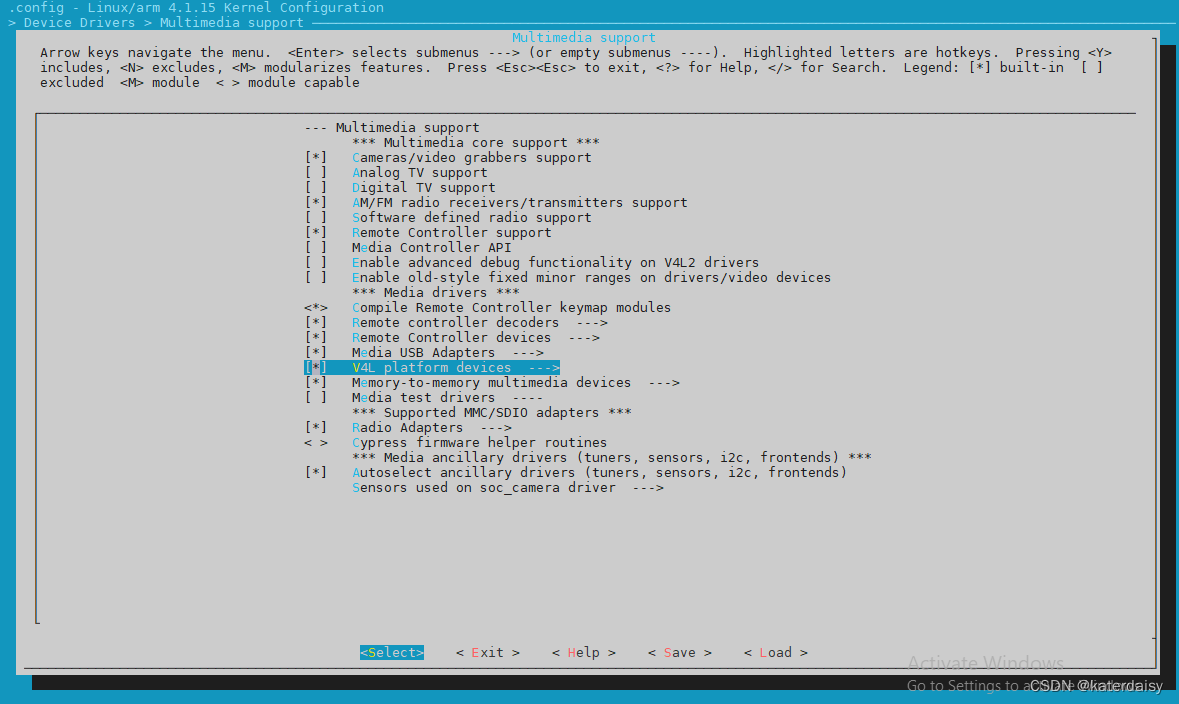
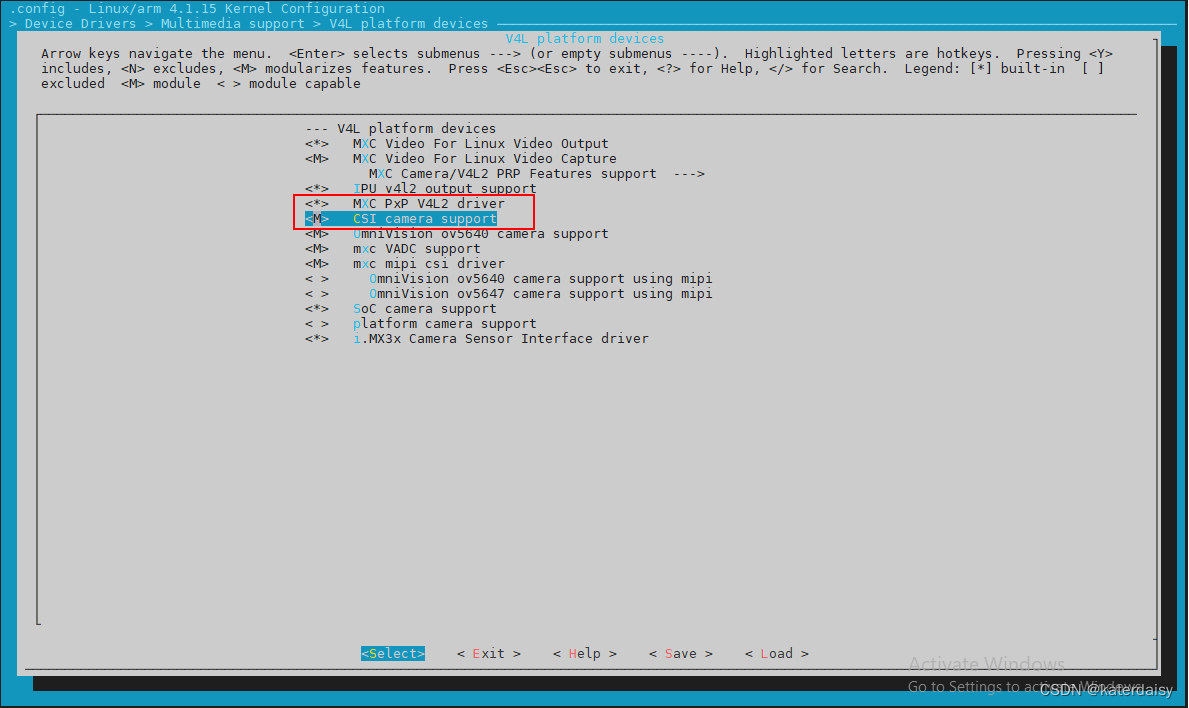
- 查看ov5640_camera.ko和 mx6s_capture.ko相关的Makefile和config配置,可见内核需要配置VIDEO_MXC_CSI_CAMERA和MXC_CAMERA_OV5640两个配置项。
Makefile:
obj-$(CONFIG_VIDEO_MXC_CSI_CAMERA) += mx6s_capture.o
ov5640_camera-objs := ov5640.o
obj-$(CONFIG_MXC_CAMERA_OV5640) += ov5640_camera.o
Kconfig:
config VIDEO_MXC_CSI_CAMERA
tristate “CSI camera support”
depends on VIDEO_MXC_CAPTURE && VIDEO_V4L2
—help—
This is the video4linux2 capture driver based on CSI module.
config MXC_CAMERA_OV5640
tristate “OmniVision ov5640 camera support”
depends on VIDEO_MXC_CAPTURE && I2C
—help—
If you plan to use the ov5640 Camera with your MXC system, say Y here.
-
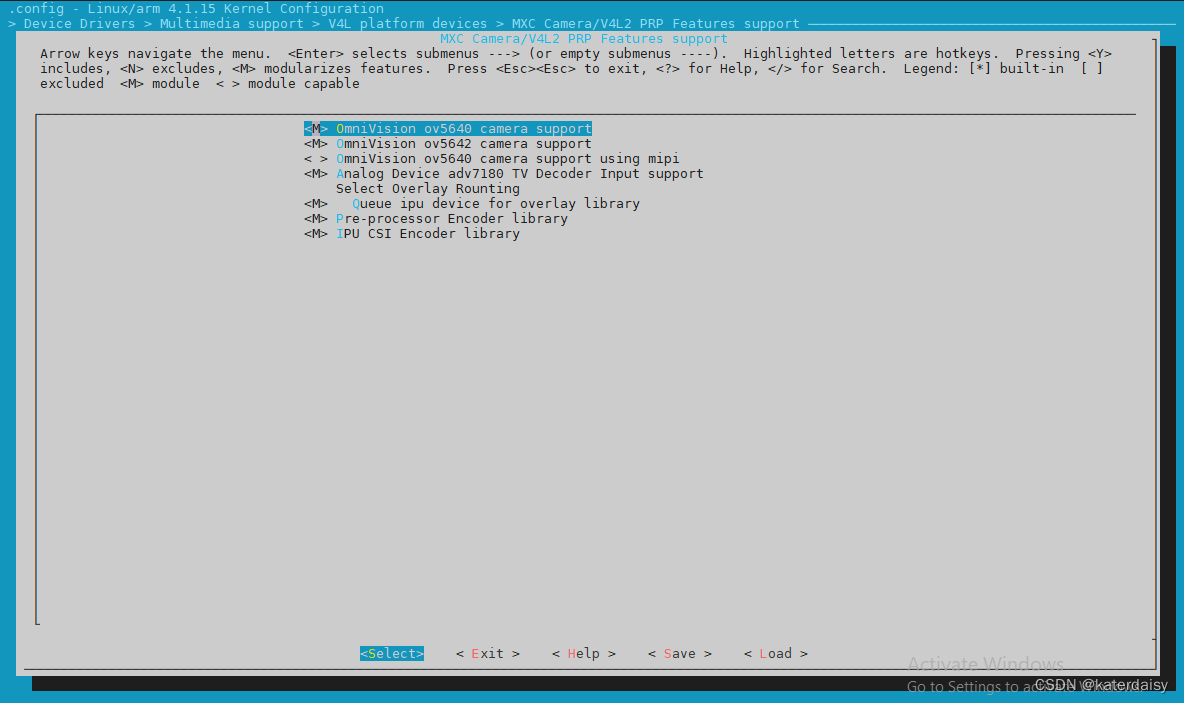
当然,仅仅配置那两项肯定是不行的,经过了几次尝试后后发现能让影像输出的配置如下。
-
NXP原厂提供ov5640.c文件也需要替换成正点原子出厂的ov5640.c。不然影像花屏,无法辨认物体。替换后影像清楚很多可以辨认物体了。
-
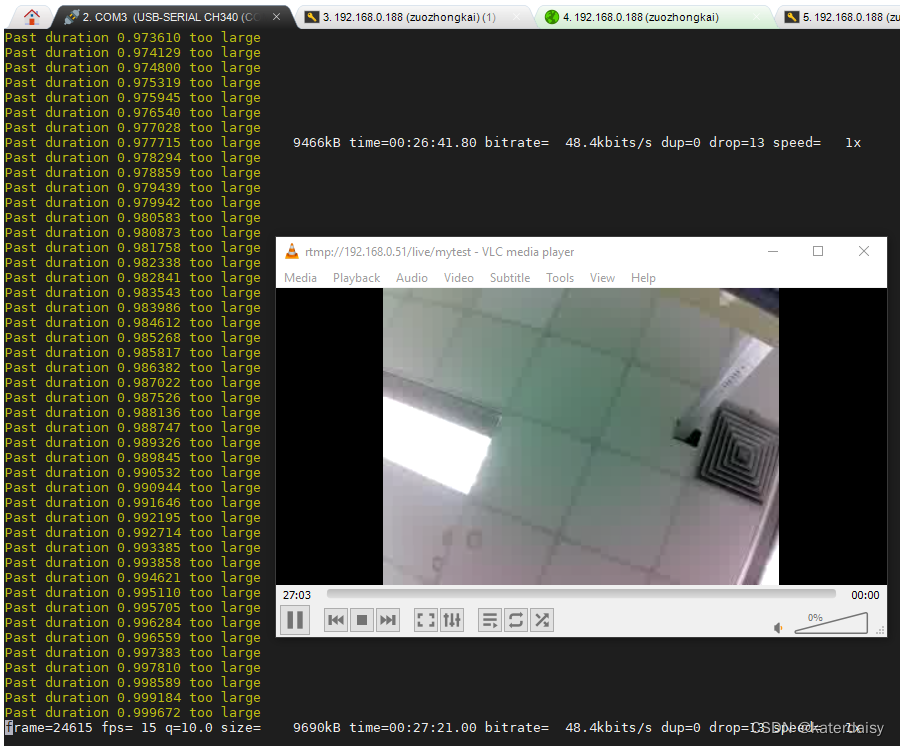
重新使用正点原子手册《I.MX6U嵌入式Linux C应用编程指南V1.4.pdf》第三十四章 实战小项目之视频监控,把影响调试了出来。
相关文章:
在imx6ull中加入ov5640模块
本来觉得是一件很简单的事情但是走了很多的弯路,记录一下调试过程。 先使用正点原子提供的出厂内核把摄像头影像调试出来,然后cat /dev/video1,看一下video1牵扯到哪些模块,可以看到需要ov5640_camera.ko和 mx6s_capture.ko这两个…...
Kafka中的auto-offset-reset配置
Kafka这个服务在启动时会依赖于Zookeeper,Kafka相关的部分数据也会存储在Zookeeper中。如果kafka或者Zookeeper中存在脏数据的话(即错误数据),这个时候虽然生产者可以正常生产消息,但是消费者会出现无法正常消费消息的…...

TCP/IP_整理起因
先分享一个初级的问题;有个客户现场,终端设备使用客户网络更新很慢,使用手机热点更新速度符合预期;网络部署情况如下: 前期花费了很大的精力进行问题排查对比,怀疑是客户网络问题(其他的客户现…...
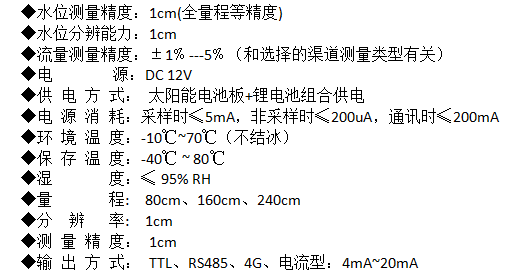
CG-0A 电子水尺水导电测量原理应用于道路积水监测
CG-0A 电子水尺水导电测量原理应用于道路积水监测产品概述 本产品是一种采用微处理器芯片为控制器,内置通讯电路的数字式水位传感器,具备高的可靠性及抗干扰性能。适用于江、河、湖、水库及蓄水池、水渠等处的水位测量使用。 本产品采用了生产工艺技术…...

openEuler JDK21 部署 Zookeeper 集群
zookeeper-jdk21 操作系统:openEuler JDK:21 主机名IP地址spark01192.168.171.101spark02192.168.171.102spark03192.168.171.103 安装 1. 升级内核和软件 yum -y update2. 安装常用软件 yum -y install gcc gcc-c autoconf automake cmake make \zl…...

前端——html拖拽原理
文章目录 ⭐前言⭐draggable属性💖 api💖 单向拖动示例💖 双向拖动示例 ⭐总结⭐结束 ⭐前言 大家好,我是yma16,本文分享关于 前端——html拖拽原理。 vue3系列相关文章: vue3 fastapi 实现选择目录所有文…...
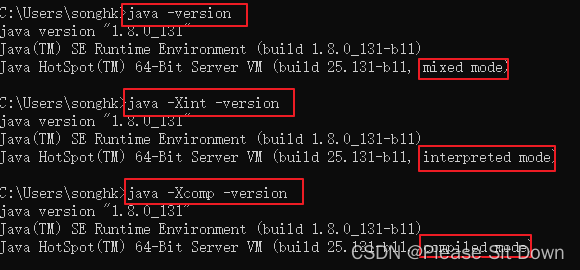
JVM 执行引擎篇
机器码、指令、汇编语言 机器码 各种用二进制编码方式表示的指令,叫做机器指令码。开始,人们就用它采编写程序,这就是机器语言。机器语言虽然能够被计算机理解和接受,但和人们的语言差别太大,不易被人们理解和记忆&a…...

js中数组对象去重的方法
前端面试题库 (面试必备) 推荐:★★★★★ 地址:前端面试题库 最近工作中需要用到数组对象去重的方法,我是怎么想也没想出来,今天稍微研究了一下,总算找到了2种方法。分享一下&…...
【送书活动四期】被GitHub 要求强制开启 2FA 双重身份验证,我该怎么办?
记得是因为fork了OpenZeppelin/openzeppelin-contracts的项目,之后就被GitHub 要求强制开启 2FA 双重身份验证了,一拖再拖,再过几天帐户操作将受到限制了,只能去搞一下了 目录 2FA是什么为什么要开启 2FA 验证GitHub 欲在整个平台…...
)
GO设计模式——13、享元模式(结构型)
目录 享元模式(Flyweight Pattern) 享元模式的核心角色: 优缺点 使用场景 注意事项 代码实现 享元模式(Flyweight Pattern) 享元模式(Flyweight Pattern)它通过共享对象来减少内存使用和提…...
Linux 网络协议
1 网络基础 1.1 网络概念 网络是一组计算机或者网络设备通过有形的线缆或者无形的媒介如无线,连接起来,按照一定的规则,进行通讯的集合( 缺一不可 )。 5G的来临以及IPv6的不断普及,能够进行联网的设备将会是越来越多(…...

【C语言】7-32 刮刮彩票 分数 20
7-32 刮刮彩票 分数 20 全屏浏览题目 切换布局 作者 DAI, Longao 单位 杭州百腾教育科技有限公司 “刮刮彩票”是一款网络游戏里面的一个小游戏。如图所示: 每次游戏玩家会拿到一张彩票,上面会有 9 个数字,分别为数字 1 到数字 9…...
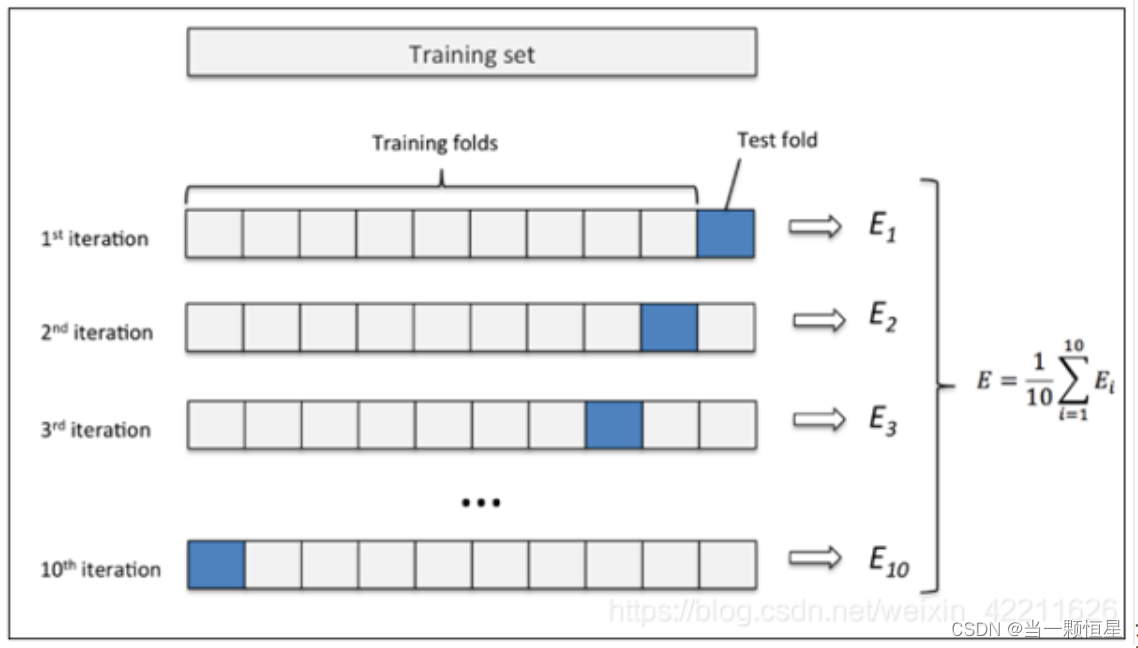
交叉验证以及scikit-learn实现
交叉验证 交叉验证既可以解决数据集的数据量不够大问题,也可以解决参数调优的问题。 主要有三种方式: 简单交叉验证(HoldOut检验)、k折交叉验证(k-fold交叉验证)、自助法。 本文仅针对k折交叉验证做详细解…...

css实现头部占一定高度,内容区占剩余高度可滚动
上下布局: <div class"container"><header class"header">头部内容</header><div class"content">内容区域</div> </div>.container {display: flex;flex-direction: column;height: 100vh; /*…...

redis主从复制模式和哨兵机制
目录 第一章、主从复制模式1.1)Redis 主从复制模式介绍1.2)Redis 主从复制实现、 第二章、哨兵机制2.1)容灾处理之哨兵2.2)Sentinel 配置 第一章、主从复制模式 1.1)Redis 主从复制模式介绍 ①单点故障:数…...

WebStorm:Mac/Win上强大的JavaScript开发工具
WebStorm是JetBrains公司开发的针对Mac和Windows系统的JavaScript开发工具。它为开发者提供了一站式的代码编辑、调试、测试和版本控制等功能,帮助你更高效地进行Web开发。新版本的WebStorm 2023在性能和用户体验方面都做出了重大改进,让你的JavaScript开…...

传世SUN引擎如何安装
大家在搭建的时候一定要理清思路一步一步来,否则一步错步步错。下面跟大家说一下搭建的顺序以及细节。 第一步:首先下载DBC2000进行安装,并按照里面的说明设置好。1、请把压缩包释放到D:\QMirServer目录下。2、在控制面板里找到BDC Administ…...

vue 生命周期
什么是生命周期,有什么作用 定义:vue 实例从创建到销毁的过程,在某个特定的位置会触发一个回调函数 作用:供开发者在生命周期的特定阶段执行相关的操作 生命周期分别有几个阶段 有四个阶段,每个阶段有两个钩子&…...

多开工具对应用程序性能的影响与优化
多开工具对应用程序性能的影响与优化 摘要: 随着计算机技术的不断发展,多开工具逐渐成为一种常见的软件应用。然而,使用多开工具可能会对应用程序的性能产生一定的影响。本文将探讨多开工具对应用程序性能的影响,并提供一些优化方…...

G1 GC基本逻辑
1 MixedGC基本过程 在G1GC中,有两种主要的垃圾回收过程:Young GC和Mixed GC。这两者都是为了回收堆内存中的垃圾对象,但是他们关注的区域和工作方式有所不同。 Young GC: Young GC主要负责回收Young Generation(包括…...

合宙Air153C看门狗芯片:嵌入式系统可靠性的硬件守护方案
1. 项目概述:一颗“小而美”的国产看门狗芯片最近在做一个低功耗的户外监测设备项目,主控用的就是合宙的Air系列MCU。在调试过程中,最让我头疼的就是系统偶尔的“死机”问题。设备部署在野外,不可能每次都跑过去手动重启。正当我琢…...

多维子集和问题:NP难问题的算法与应用解析
1. 多维子集和问题概述多维子集和问题(Multi-dimensional Subset Sum Problem)是计算复杂度理论中的经典NP难问题。简单来说,它要求在给定的n维向量集合中,找出一个子集,使得该子集中所有向量在每一维上的和恰好等于目标向量对应的分量。这个…...

Gopeed下载器深度解析:从零开始构建你的全平台高速下载解决方案
Gopeed下载器深度解析:从零开始构建你的全平台高速下载解决方案 【免费下载链接】gopeed A fast, modern download manager for HTTP, BitTorrent, Magnet, and ed2k. Cross-platform, built with Golang and Flutter. 项目地址: https://gitcode.com/GitHub_Tre…...

线程化笔记工具:重塑深度思考与知识管理的技术实践
1. 项目概述:一个为线程化思考而生的笔记工具最近在折腾个人知识管理工具时,发现了一个挺有意思的开源项目:alishobeiri/thread-notebook。乍一看名字,可能会以为是又一个普通的Markdown笔记本应用。但深入使用后,我发…...

构建通用Docker工具镜像:从设计到实践的全流程指南
1. 项目概述:一个“反重力”的Docker镜像?看到这个镜像名runzhliu/docker-antigravity,很多人的第一反应可能是好奇和疑惑。在Docker Hub上,以“antigravity”(反重力)命名的镜像并不常见,它不像…...

基于意图与技能解耦的智能对话系统构建指南
1. 项目概述:一个意图与技能驱动的AI对话引擎最近在折腾AI应用开发,特别是对话型AI助手时,发现一个核心痛点:如何让AI不仅能理解用户说了什么(意图识别),还能精准地调用相应的功能(技…...

Linux光标主题管理工具x-cursor-help:从原理到实战
1. 项目概述:一个被低估的鼠标光标辅助工具如果你在Linux桌面环境下工作,尤其是使用像GNOME、KDE Plasma这类现代化的桌面环境,你可能会遇到一个不大不小但很恼人的问题:鼠标光标主题的安装和管理。从网上下载了一个漂亮的.tar.gz…...

基于规则引擎与AI Agent的Google Ads自动化营销系统设计与实践
1. 项目概述:当AI遇上Google Ads,一个自动化营销引擎的诞生最近在折腾一个挺有意思的项目,起因是发现很多团队在管理Google Ads广告时,依然在重复着大量手动、低效的操作。无论是关键词的日常拓词、否定关键词的筛选,还…...

CursorTouch/Web-Use:用JavaScript在桌面端模拟移动端触摸交互
1. 项目概述:当光标变成你的手指你有没有想过,在电脑上浏览网页时,如果能像在手机上那样,直接用手指滑动、点击、缩放,体验会不会更流畅?尤其是在处理一些需要精细操作或快速浏览长文档的场景时,…...

嘎嘎降AI和率零哪个更适合毕业论文:2026年性价比达标率用户口碑完整横评测试报告
嘎嘎降AI和率零哪个更适合毕业论文:2026年性价比达标率用户口碑完整横评测试报告 帮几个不同专业的同学处理过论文AI率,用过的工具加起来也有六七款了。 综合看,嘎嘎降AI(www.aigcleaner.com)是最稳的选择࿰…...