FPGA模块——SPI协议(读写FLASH)
FPGA模块——SPI协议(读写FLASH)
- (1)FLASH芯片 W25Q16BV
- (2)SPI协议
- (3)芯片部分命令
- 1.Write Enable(06h)
- 2.Chip Erase (C7h / 60h)
- 3.写指令(02h)
- 4.读指令(03h)
- (4)代码
- 1. FPGA做主机的SPI协议
- 2. SPI协议的使用
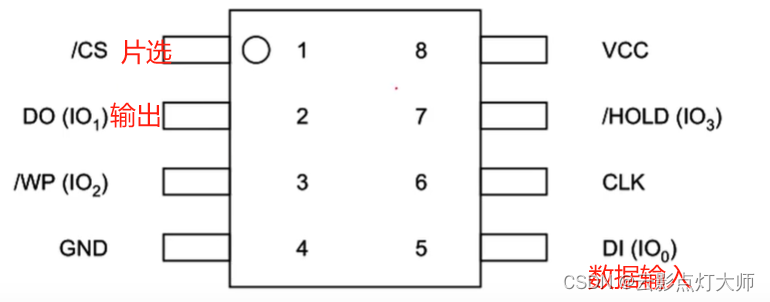
(1)FLASH芯片 W25Q16BV
芯片引脚图:
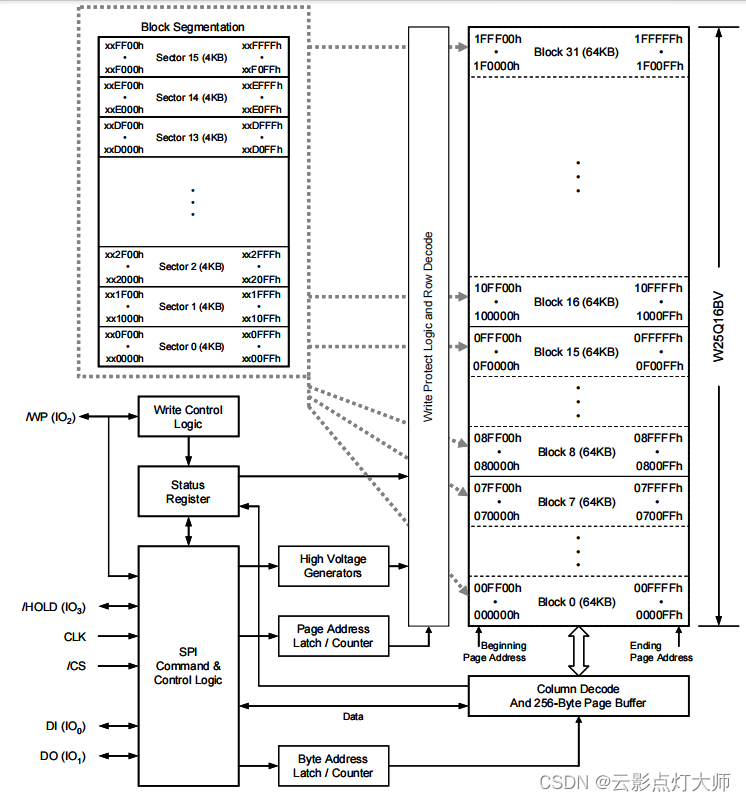
内部结构图:
存储区域总共分成了32块,每块64KB。每块又分成了16个部分,每个部分4KB。方便进行读取和局部操作。
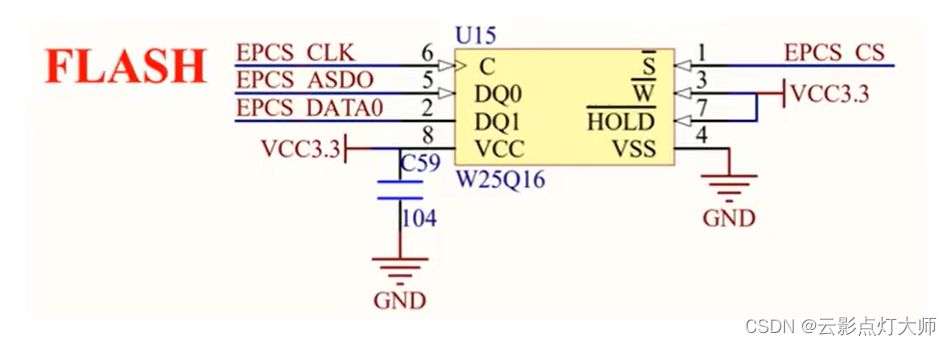
电路设计
(2)SPI协议
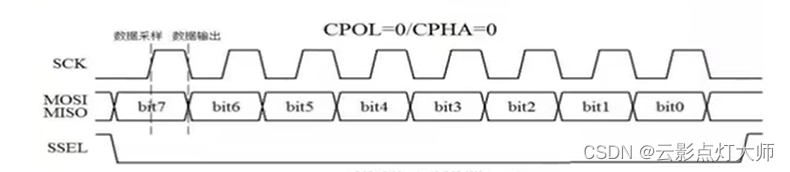
SPI的四种模式
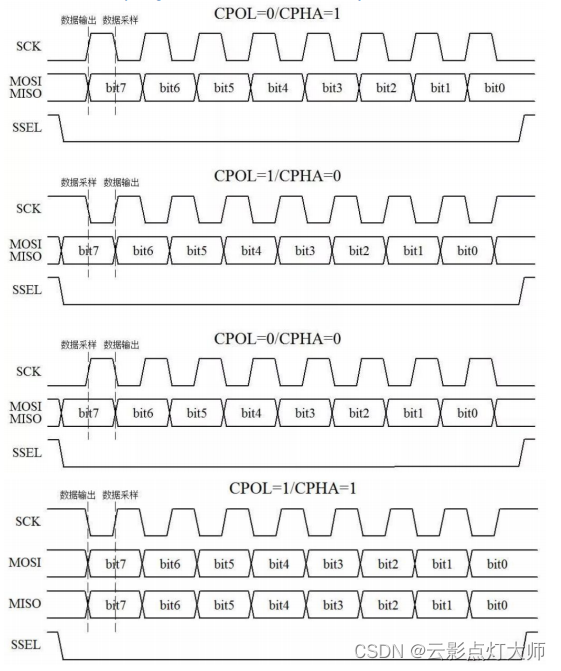
这里使用这个模式:
主机和从机在时钟上升沿放入要输出的数据,在时钟下降沿读取要输入的数据。
8个时钟后交换一个字节8位数据(高位在前)。
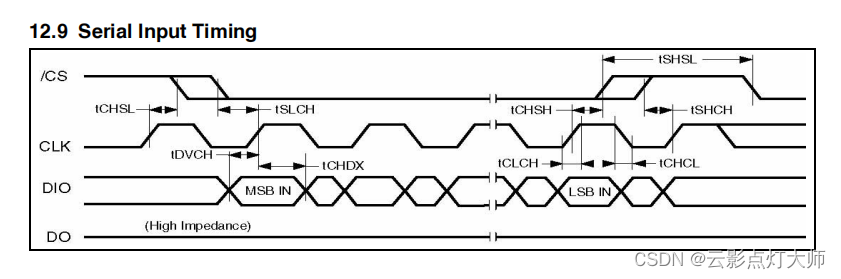
(3)芯片部分命令
有个输入时序的要求 开始时CS拉低等待(tSLCH要求最小5ns)再开始, 结束时CS拉高等待(tSHSL用100ns )再进行下一次操作。
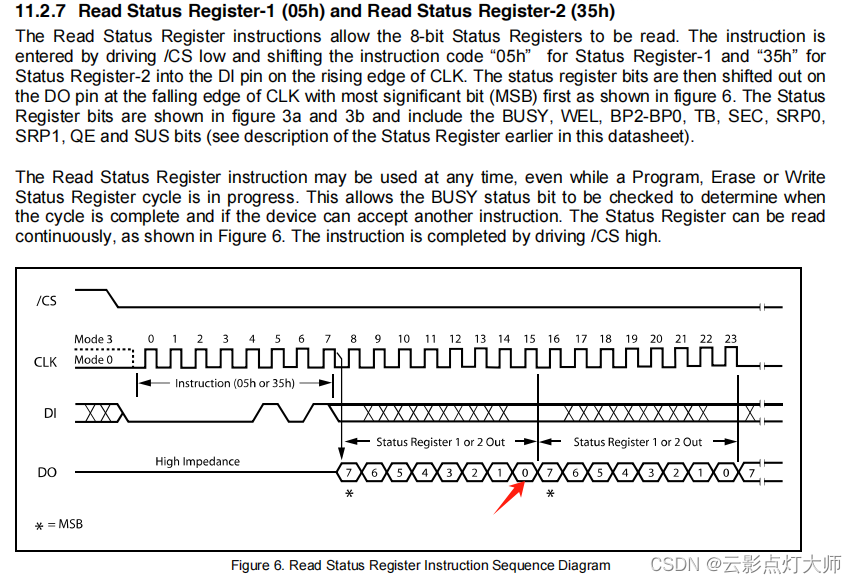
这个寄存器的第一位数据可以判断操作是否完成(BUSY位)
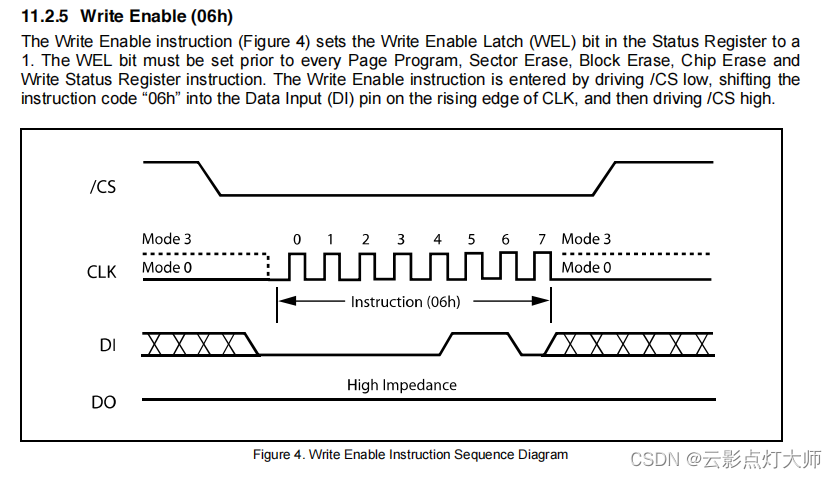
1.Write Enable(06h)
写使能:开始时CS拉低等待(tSLCH要求最小5ns)再开始,结束时CS拉高等待(tSHSL取100ns )再进行下一次操作。
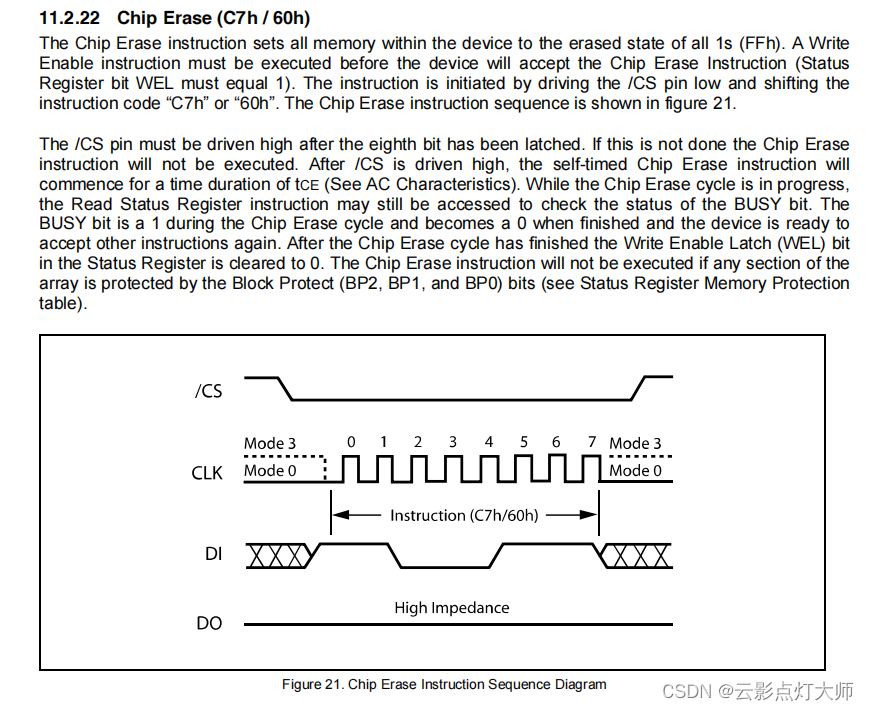
2.Chip Erase (C7h / 60h)
整片擦除,要判断操作是否完成
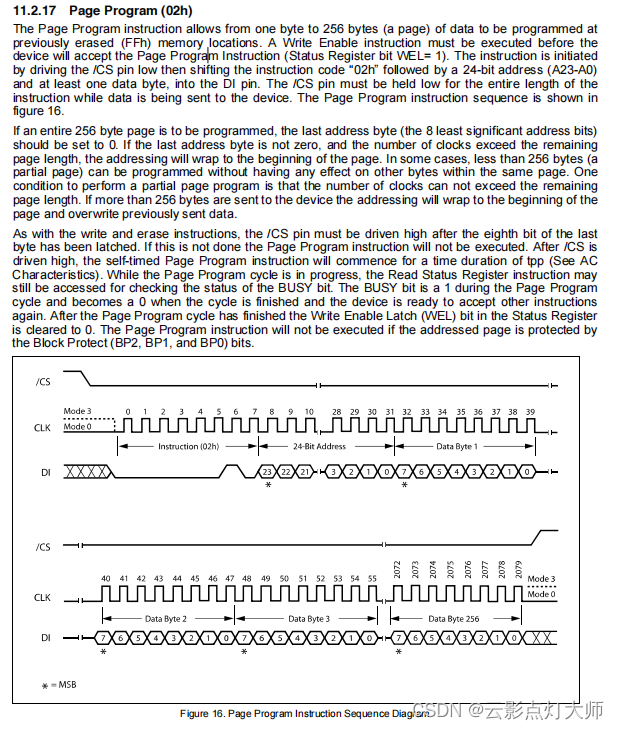
3.写指令(02h)
数据写多了会把之前的数据覆盖掉,要判断操作是否完成。
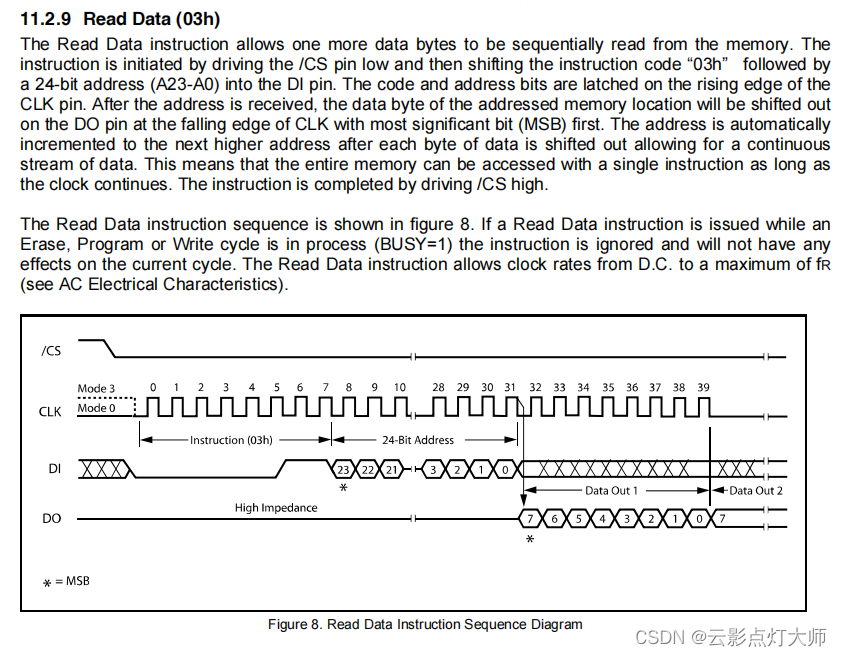
4.读指令(03h)
要判断操作是否完成
(4)代码
1. FPGA做主机的SPI协议
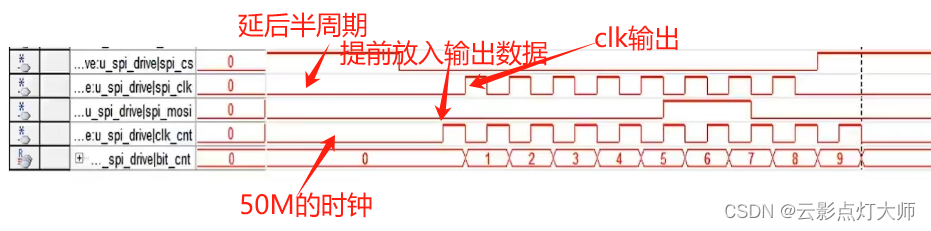
对信号进行同步和提前准备:
100m时钟和clk_cnt配合进行数据的读取和输出(clk_cnt有等于1和0的时候)
spi_clk基于100m时钟输出一个相当于clk_cnt的延时半个周期的时钟,确保输入输出数据稳定。
module spi_drive(input clk_100m ,input sys_rst_n ,//user interfaceinput spi_start ,//spi开启使能。input [7:0 ] spi_cmd ,//FLAH操作指令input [23:0] spi_addr ,//FLASH地址input [7:0 ] spi_data ,//FLASH写入的数据input [3:0 ] cmd_cnt ,output idel_flag_r ,//空闲状态标志的上升沿 output reg w_data_req ,//FLASH写数据请求 output reg [7:0] r_data ,//FLASH读出的数据output reg erro_flag ,//读出的数据错误标志//spi interfaceoutput reg spi_cs ,//SPI从机的片选信号,低电平有效。output reg spi_clk ,//主从机之间的数据同步时钟。output reg spi_mosi ,//数据引脚,主机输出,从机输入。input spi_miso //数据引脚,主机输入,从机输出。);//状态机
parameter IDLE =4'd0;//空闲状态
parameter WEL =4'd1;//写使能状态
parameter S_ERA =4'd2;//扇区擦除状态
parameter C_ERA =4'd3;//全局擦除
parameter READ =4'd4;//读状态
parameter WRITE =4'd5;//写状态
parameter R_STA_REG =4'd6;//指令集
parameter WEL_CMD =8'h06;
parameter S_ERA_CMD =8'h20;
parameter C_ERA_CMD =8'hc7;
parameter READ_CMD =8'h03;
parameter WRITE_CMD =8'h02;
parameter R_STA_REG_CMD=8'h05;//wire define
wire idel_flag;//reg define
reg[3:0] current_state ;
reg[3:0] next_state ;
reg[7:0 ] data_buffer ;
reg[7:0 ] cmd_buffer ;
reg[7:0 ] sta_reg ;
reg[23:0] addr_buffer ;
reg[31:0] bit_cnt ;
reg clk_cnt ;
reg dely_cnt ;
reg[31:0] dely_state_cnt ;
reg[7:0 ] rd_data_buffer ;
reg spi_clk0 ;
reg stdone ;
reg[7:0 ] data_check ;
reg idel_flag0 ;
reg idel_flag1 ;//*****************************************************
//** main code
//*****************************************************//*抓取上升沿
assign idel_flag=(current_state==IDLE)?1:0;//空闲状态标志
assign idel_flag_r=idel_flag0&&(~idel_flag1);//空闲状态标志的上升沿//*抓取上升沿要用的
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)beginidel_flag0<=1'b1;idel_flag1<=1'b1;endelse beginidel_flag0<=idel_flag;idel_flag1<=idel_flag0;end
end//请求数据 + 把数据放入buffer
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)w_data_req<=1'b0;else if((bit_cnt+2)%8==0&&bit_cnt>=30&&clk_cnt==0&¤t_state==WRITE) //提前2个时钟周期w_data_req<=1'b1;elsew_data_req<=1'b0;
endalways @(posedge clk_100m or negedge sys_rst_n )begin//读出的数据移位寄存if(!sys_rst_n)rd_data_buffer<=8'd0;else if(bit_cnt>=32&&bit_cnt<=2080&&clk_cnt==0&¤t_state==READ) rd_data_buffer<={rd_data_buffer[6:0],spi_miso};elserd_data_buffer<=rd_data_buffer;
endalways @(posedge clk_100m or negedge sys_rst_n )begin//检查读出的数据是否正确if(!sys_rst_n)data_check<=8'd0;else if(bit_cnt%8==0&&bit_cnt>=40&&clk_cnt==1&¤t_state==READ)data_check<=data_check+1'd1;elsedata_check<=data_check;
endalways @(posedge clk_100m or negedge sys_rst_n )begin//读出的数据if(!sys_rst_n)r_data<=8'd0;else if(bit_cnt%8==0&&bit_cnt>38&&clk_cnt==1&¤t_state==READ)r_data<=rd_data_buffer;elser_data<=r_data;
endalways @(posedge clk_100m or negedge sys_rst_n )begin//读出的数据错误标志if(!sys_rst_n)erro_flag<=1'd0;else if(bit_cnt>32&&bit_cnt<=2080&¤t_state==READ&&cmd_cnt==6)beginif(data_check!=r_data)erro_flag<=1'd1;elseerro_flag<=erro_flag;endelseerro_flag<=erro_flag;
end//*把数据放入buffer 提前一个周期
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)data_buffer<=8'd0;else if((bit_cnt+1)%8==0&&bit_cnt>30&&clk_cnt==1)//*把数据放入buffer 提前一个周期data_buffer<=spi_data;else if(clk_cnt==1&¤t_state==WRITE&&bit_cnt>=32)data_buffer<={data_buffer[6:0],data_buffer[7]};elsedata_buffer<=data_buffer;
end//*----位移cmd指令存储器 开始:cs选中且dely未生效,提前了100mhz的周期------------
//使50mhz时数据提前半个周期获得
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)cmd_buffer<=8'd0;else if(spi_cs==0&&dely_cnt==0)cmd_buffer<=spi_cmd;else if(clk_cnt==1&&(current_state==WEL||current_state==S_ERA||current_state==C_ERA||current_state==READ||current_state==WRITE||current_state==R_STA_REG)&&bit_cnt<8)cmd_buffer<={cmd_buffer[6:0],1'b1};elsecmd_buffer<=cmd_buffer;
end//取出地址每一位
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)addr_buffer<=8'd0;else if(spi_cs==0&&dely_cnt==0)addr_buffer<=spi_addr;else if(clk_cnt==1&&(current_state==READ||current_state==WRITE)&&bit_cnt>=8&&bit_cnt<32)addr_buffer<={addr_buffer[22:0],addr_buffer[23]};elseaddr_buffer<=addr_buffer;
end//------------使能后clk_cnt输出50M时钟用于操作信号--------------
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)clk_cnt<=1'd0;else if(dely_cnt==1)clk_cnt<=clk_cnt+1'd1;else clk_cnt<=1'd0;
end//*---------cs选中器件后的信号输出的 dely_cnt 可以认为是使能操作------------
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)dely_cnt<=1'd0;else if(spi_cs==0)beginif(dely_cnt<1)dely_cnt<=dely_cnt+1'd1;elsedely_cnt<=dely_cnt;endelsedely_cnt<=1'd0;
end//*-----------------结束的延时计时器------------------------------------
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)dely_state_cnt<=1'd0;else if(spi_cs)beginif(dely_state_cnt<400000000)dely_state_cnt<=dely_state_cnt+1'd1;elsedely_state_cnt<=dely_state_cnt;endelsedely_state_cnt<=1'd0;
end//*-------------------------bit读写计数---------------------
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)bit_cnt<=11'd0;else if(dely_cnt==1)beginif(clk_cnt==1'b1)bit_cnt<=bit_cnt+1'd1;elsebit_cnt<=bit_cnt;endelsebit_cnt<=11'd0;
end
状态机 :每个状态该干什么,怎么转移
修改里面的命令和转态就可以移植到其他的地方了。
//三段式状态机
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)current_state<=IDLE;elsecurrent_state<=next_state;
endalways @(*)begincase(current_state)IDLE: beginif(spi_start&&spi_cmd==WEL_CMD)next_state=WEL;else if(spi_start&&spi_cmd==C_ERA_CMD)next_state=C_ERA;else if(spi_start&&spi_cmd==S_ERA_CMD)next_state=S_ERA;else if(spi_start&&spi_cmd==READ_CMD)next_state=READ;else if(spi_start&&spi_cmd==WRITE_CMD)next_state=WRITE;else if(spi_start&&spi_cmd==R_STA_REG_CMD)next_state=R_STA_REG;elsenext_state=IDLE;endWEL: beginif(stdone&&bit_cnt>=8)next_state=IDLE;elsenext_state=WEL;endS_ERA: beginif(stdone)next_state=IDLE;elsenext_state=S_ERA;endC_ERA: begin if(stdone)next_state=IDLE;elsenext_state=C_ERA;endREAD: begin if(stdone&&bit_cnt>=8)next_state=IDLE;elsenext_state=READ;endWRITE: begin if(stdone&&bit_cnt>=8)next_state=IDLE;elsenext_state=WRITE;endR_STA_REG: begin if(stdone)next_state=IDLE;elsenext_state=R_STA_REG;enddefault: next_state=IDLE; endcase
endalways @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n) beginspi_cs<=1'b1;spi_clk<=1'b0;spi_clk0<=1'b0;spi_mosi<=1'b0; stdone<=1'b0; endelse begincase(current_state)IDLE: beginspi_cs<=1'b1;spi_clk<=1'b0;spi_mosi<=1'b0; endWEL: beginstdone<=1'b0;spi_cs<=1'b0;if(dely_cnt==1&&bit_cnt<8) begin spi_clk0<=~spi_clk0;spi_clk<=spi_clk0;spi_mosi<=cmd_buffer[7];endelse if(bit_cnt==8&&clk_cnt==0)beginstdone<=1'b1;spi_clk<=1'b0; spi_mosi<=1'b0; endelse if(bit_cnt==8&&clk_cnt==1)beginspi_cs<=1'b1; endendC_ERA: beginstdone<=1'b0;if(dely_state_cnt==10) spi_cs<=1'b0;else if(dely_cnt==1&&bit_cnt<8) begin spi_clk0<=~spi_clk0;spi_clk<=spi_clk0;spi_mosi<=cmd_buffer[7];endelse if(bit_cnt==8&&clk_cnt==0)beginstdone<=1'b1; spi_clk<=1'b0;spi_mosi<=1'b0; endelse if(bit_cnt==8&&clk_cnt==1)beginspi_cs<=1'b1; endendS_ERA: beginstdone<=1'b0; if(dely_state_cnt==10) spi_cs<=1'b0;else if(dely_cnt==1&&bit_cnt<8) begin spi_clk0<=~spi_clk0;spi_clk<=spi_clk0;spi_mosi<=cmd_buffer[7];endelse if(bit_cnt>=8&&bit_cnt<32&&spi_cs==0)beginspi_cs<=1'b0;spi_clk0<=~spi_clk0;spi_clk<=spi_clk0;spi_mosi<=addr_buffer[23];endelse if(bit_cnt==32&&clk_cnt==0) beginspi_cs<=1'b1;spi_clk<=1'b0;spi_mosi<=1'b0;stdone<=1'b1;endendREAD: beginstdone<=1'b0;if(dely_state_cnt==10) spi_cs<=1'b0;else if(dely_cnt==1&&bit_cnt<8) begin spi_clk0<=~spi_clk0;spi_clk<=spi_clk0;spi_mosi<=cmd_buffer[7];endelse if(bit_cnt>=8&&bit_cnt<32&&spi_cs==0)begin spi_clk0<=~spi_clk0;spi_clk<=spi_clk0;spi_mosi<=addr_buffer[23];endelse if(bit_cnt>=32&&bit_cnt<2080)begin spi_clk0<=~spi_clk0;spi_clk<=spi_clk0;spi_mosi<=1'b0; endelse if(bit_cnt==2080&&clk_cnt==0) begin spi_clk<=1'b0;spi_mosi<=1'b0;stdone<=1'b1; endelse if(bit_cnt==2080&&clk_cnt==1) beginspi_cs<=1'b1;endendWRITE: beginstdone<=1'b0;if(dely_state_cnt==10) spi_cs<=1'b0;else if(dely_cnt==1&&bit_cnt<8) begin spi_clk0<=~spi_clk0;spi_clk<=spi_clk0;spi_mosi<=cmd_buffer[7];endelse if(bit_cnt>=8&&bit_cnt<32&&spi_cs==0)begin spi_clk0<=~spi_clk0;spi_clk<=spi_clk0;spi_mosi<=addr_buffer[23];endelse if(bit_cnt>=32&&bit_cnt<2080)begin spi_clk0<=~spi_clk0;spi_clk<=spi_clk0;spi_mosi<=data_buffer[7];endelse if(bit_cnt==2080&&clk_cnt==0) beginspi_clk<=1'b0;spi_mosi<=1'b0;stdone<=1'b1;endelse if(bit_cnt==2080&&clk_cnt==1) beginspi_cs<=1'b1;endendR_STA_REG:begin stdone<=1'b0;if(dely_state_cnt==10) spi_cs<=1'b0;else if(dely_cnt==1&&bit_cnt<8)begin spi_clk0<=~spi_clk0;spi_clk<=spi_clk0;spi_mosi<=cmd_buffer[7];endelse if(bit_cnt==8)begin spi_clk0<=~spi_clk0;spi_clk<=spi_clk0;spi_mosi<=1'b0; end else if(~spi_miso&&bit_cnt%8==0)beginspi_clk<=1'b0;spi_cs<=1'b1;stdone<=1'b1;endelse if(~spi_cs&&dely_cnt==1)beginspi_clk0<=~spi_clk0;spi_clk<=spi_clk0;end end default: beginstdone<=1'b0;spi_cs<=1'b1;spi_clk<=1'b0;spi_clk0<=1'b0;spi_mosi<=1'b0; endendcaseend
endendmodule2. SPI协议的使用
首先系统开始运行,来几个周期延伸。
spi_start信号只是一个周期脉冲。
idel_flag_r是进入空闲状态的标志位也就是意味着上一步操作完成。
cmd计数指令不断加来切换不同的命令。
spi_cmd 输出命令
module flash_rw(input sys_clk ,input sys_rst_n ,input idel_flag_r ,input w_data_req ,output reg[3:0 ] cmd_cnt ,output reg spi_start ,//spi开启使能。output reg[7:0 ] spi_cmd ,output reg[7:0 ] spi_data );//指令集
parameter WEL_CMD =16'h06;
parameter S_ERA_CMD =16'h20;
parameter C_ERA_CMD =16'hc7;
parameter READ_CMD =16'h03;
parameter WRITE_CMD =16'h02;
parameter R_STA_REG_CMD=8'h05 ;//reg define
reg[3:0] flash_start;//SPI 要写入的数据
always @(posedge sys_clk or negedge sys_rst_n )beginif(!sys_rst_n)flash_start<=0;else if(flash_start<=5)flash_start<=flash_start+1;elseflash_start<=flash_start;
endalways @(posedge sys_clk or negedge sys_rst_n )beginif(!sys_rst_n)cmd_cnt<=0;else if(flash_start==4)spi_start<=1'b1;else if(idel_flag_r&&cmd_cnt<10)begincmd_cnt<=cmd_cnt+1;spi_start<=1'b1;endelse begincmd_cnt<=cmd_cnt;spi_start<=1'b0;end
endalways @(posedge sys_clk or negedge sys_rst_n )beginif(!sys_rst_n)spi_data<=8'd0;else if(w_data_req)spi_data<=spi_data+1'b1;elsespi_data<=spi_data;
endalways @(*)begincase(cmd_cnt)0:spi_cmd=WEL_CMD;1:spi_cmd=C_ERA_CMD;2:spi_cmd=R_STA_REG_CMD;3:spi_cmd=WEL_CMD;4:spi_cmd=WRITE_CMD;5:spi_cmd=R_STA_REG_CMD;6:spi_cmd=READ_CMD;7:spi_cmd=WEL_CMD;8:spi_cmd=S_ERA_CMD;9:spi_cmd=R_STA_REG_CMD;10:spi_cmd=READ_CMD;default:;endcase
endendmodule
相关文章:
FPGA模块——SPI协议(读写FLASH)
FPGA模块——SPI协议(读写FLASH) (1)FLASH芯片 W25Q16BV(2)SPI协议(3)芯片部分命令1.Write Enable(06h)2.Chip Erase (C7h / 60h)3.写指令(02h&am…...

SQL自学通之表达式条件语句与运算
目录 一、目标 二、表达式条件语句 1、表达式: 2、条件 2.1、WHERE 子句 三、运算 1、数值型运算: 1.1、加法() 1.2、减法 (-) 1.3、除法(/) 1.4、乘法 (*) 1.5、取模 (%) 优先级别…...

公网域名如何解析到内网IP服务器——快解析域名映射外网访问
在本地搭建主机应用后,由于没有公网IP或没有公网路由权限,在需要发布互联网时,就需要用到外网访问内网的一些方案。由于内网IP在外网不能直接访问,通常就用通过外网域名来访问内网的方法。那么,公网域名如何解析到内网…...

线程安全与并发区别
在并发编程中,"线程安全 "和 "并发 "是相关的概念,但它们有着不同的含义。 线程安全 如果一个类或方法可以同时被多个线程使用,而不会导致数据损坏或意外行为,那么这个类或方法就被认为是线程安全的。即使多…...

SEO优化是什么,如何进行SEO优化
SEO(Search Engine Optimization)是指通过对网站进行优化,提高其在搜索引擎中的排名,从而增加有机流量和改善用户体验的一系列技术和方法。 进行SEO优化可以帮助网站获得更多的有机搜索流量,并提升网站的曝光度和可见…...

nodejs发起http或https请求
前言:使用node内置模块http、https http请求 const express require(express) const http require(http)const app express()const loginConfig (token) > {return {hostname: api.test.com,port: 80,path: /test?access_token${token},method: GET} }app.…...

举例C#使用特性排除某些类成员不参与XML序列化和反序列化
在C#中,可以使用 [XmlIgnore] 特性来排除某些类成员不参与XML序列化和反序列化。这个特性告诉XML序列化器忽略被标记的成员。 以下是一个使用 [XmlIgnore] 特性的示例: using System; using System.IO; using System.Xml.Serialization;public class P…...
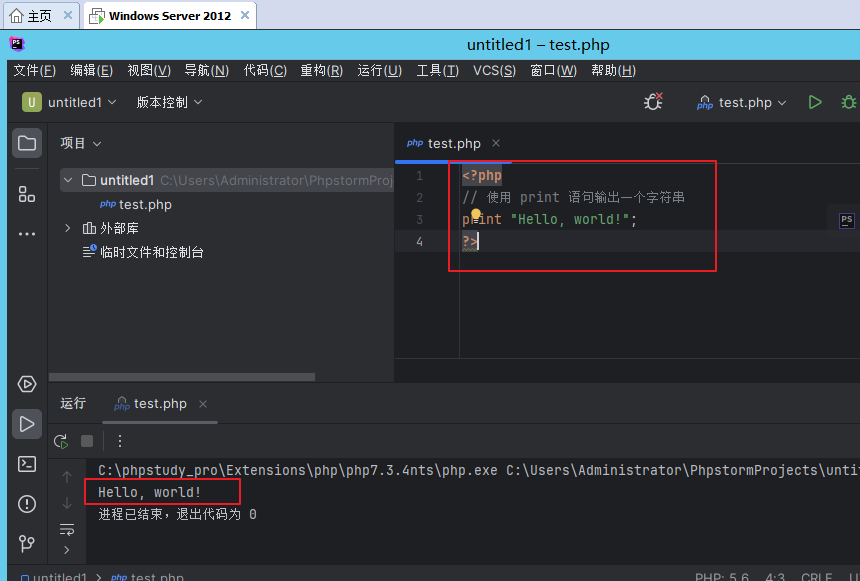
PHP基础 - 输入输出
在 PHP 中,有多种方法可以用来输出内容。下面是其中的几种: 1、echo: 这是最常见的输出语句之一,可以输出一个或多个字符串。它是一个语言结构,可以省略括号。使用示例如下: <?php // 使用 echo 语句输出一个字符串 echo "Hello, world!\n";// 可以使用…...
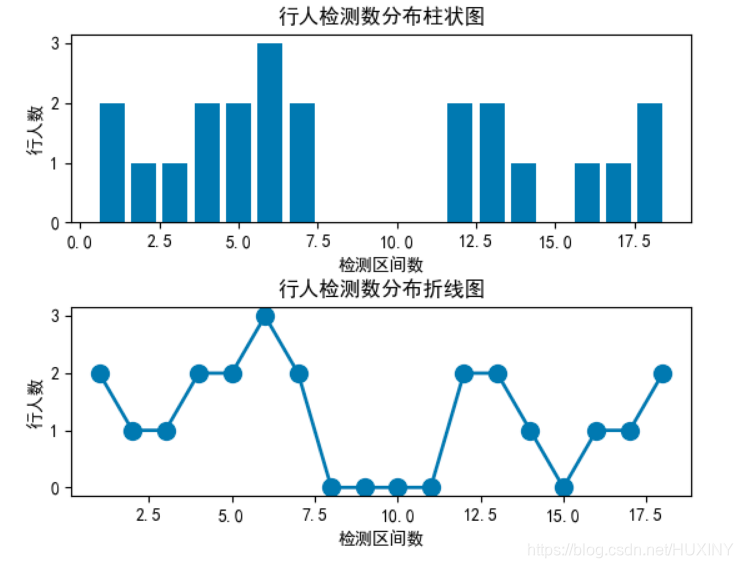
大创项目推荐 交通目标检测-行人车辆检测流量计数 - 大创项目推荐
文章目录 0 前言1\. 目标检测概况1.1 什么是目标检测?1.2 发展阶段 2\. 行人检测2.1 行人检测简介2.2 行人检测技术难点2.3 行人检测实现效果2.4 关键代码-训练过程 最后 0 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 毕业设计…...
利用R语言heatmap.2函数进行聚类并画热图
数据聚类然后展示聚类热图是生物信息中组学数据分析的常用方法,在R语言中有很多函数可以实现,譬如heatmap,kmeans等,除此外还有一个用得比较多的就是heatmap.2。最近在网上看到一个笔记文章关于《一步一步学heatmap.2函数》,在此与…...

伦茨科技宣布ST17H6x芯片已通过Apple Find My「查找」认证
深圳市伦茨科技有限公司(以下简称“伦茨科技”)发布ST17H6x Soc平台。成为继Nordic之后全球第二家取得Apple Find My「查找」认证的芯片厂家,该平台提供可通过Apple Find My认证的Apple查找(Find My)功能集成解决方案。…...
nodejs微信小程序+python+PHP的游戏测评网站设计与实现-计算机毕业设计推荐
目 录 摘 要 I ABSTRACT II 目 录 II 第1章 绪论 1 1.1背景及意义 1 1.2 国内外研究概况 1 1.3 研究的内容 1 第2章 相关技术 3 2.1 nodejs简介 4 2.2 express框架介绍 6 2.4 MySQL数据库 4 第3章 系统分析 5 3.1 需求分析 5 3.2 系统可行性分析 5 3.2.1技术可行性:…...
在 JavaScript 中导入和导出 Excel XLSX 文件:SpreadJS
在 JavaScript 中导入和导出 Excel XLSX 文件 2023 年 12 月 5 日 使用 MESCIUS 的 SpreadJS 将完整的 JavaScript 电子表格添加到您的企业应用程序中。 SpreadJS 是一个完整的企业 JavaScript 电子表格解决方案,用于创建财务报告和仪表板、预算和预测模型、科学、工…...

【Pytorch】Fizz Buzz
文章目录 1 数据编码2 网络搭建3 网络配置,训练4 结果预测5 翻车现场 学习参考来自: Fizz Buzz in Tensorflowhttps://github.com/wmn7/ML_Practice/tree/master/2019_06_10Fizz Buzz in Pytorch I need you to print the numbers from 1 to 100, excep…...

C++ Primer Plus第十四章笔记
目录 1.包含对象成员的类 valarray类简介 1.2 Student类的设计 1.3 接口和实现 1.4 C和约束 2. 私有继承 2.1 私有继承和组合的异同 2.2 初始化基类组件 2.3 访问基类的方法 2.4 访问基类对象 2.5 访问基类的友元函数 2.5 使用组合还是私有继承 3. 保护继承 4. 使…...

CentOS 7 mini 运行环境搭建与测试——CentOS Mini 安装ifconfig工具【云原生开发部署实践笔记】
云原生开发部署实践笔记 一、开发测试环境搭建与测试 1.1 Linux运行环境的搭建与测试 虽然CentOS已经更新到Stream 9 版本,但基于大多数企业和单位多数使用CentOS 7版本作为运行底座,7版本也一直在更行维护,此实践基于CentOS 7 Mini版本搭…...
案例061:基于微信小程序的互助学习系统
文末获取源码 开发语言:Java 框架:SSM JDK版本:JDK1.8 数据库:mysql 5.7 开发软件:eclipse/myeclipse/idea Maven包:Maven3.5.4 小程序框架:uniapp 小程序开发软件:HBuilder X 小程序…...

【ELK03】ES 索引的Mapping映射详解、数据类型和settings属性设置
一、ES 索引的映射和设置 1.MAPPING 映射(MAPPING)就是es中一个决定了文档如何存储,如何生成索引,字段各种类型定义的过程.类似于我们在关系型数据库中创建一个表格数据之前先定义表格有哪些字段,每个字段是什么类型,然后数据会按照这个配置写入表格,ES中同样是这个过程,它由…...
线性代数入门与学习笔记
该内容为重拾部分线性代数知识的学习笔记,内容上更多的是为了解决问题而学习的内容,并非系统化的学习。 针对的问题为:Music算法推导求解过程中的矩阵计算知识。 学习的内容包括:矩阵原理、矩阵行列式、矩阵的秩、线性变换矩阵变换…...

Linux安全学习路标
1. 操作系统基础知识 首先,你需要建立坚实的操作系统基础知识,包括Linux文件系统和目录结构、Linux进程管理、权限管理等基本概念。 2. 网络和通信安全 学习关于网络和通信安全的基础知识,包括TCP/IP协议栈、网络攻击类型、防火墙配置、网…...

基于计算机视觉的屏幕内容智能识别与自动化实践
1. 项目概述:当屏幕成为你的“眼睛”最近在折腾一个挺有意思的项目,我把它叫做“Screen Vision”,直译过来就是“屏幕视觉”。这名字听起来有点玄乎,但核心想法其实很直接:让计算机程序能像人一样,“看懂”…...

郎朗乐境音乐会定档7月5日深圳:以破界之姿,开启全维感官盛宴
2026年7月5日,郎朗乐境音乐会将在深圳市宝安体育中心体育馆启幕,作为“深圳国际形象大使”的郎朗,将在这座以创新著称的国际化都市,,进一步探索艺术表达形式的多重可能,呈现一场融合音乐、文化与多维感官体…...

嵌入式游戏开发实战:在4x8 LED点阵上用CircuitPython复刻FlappyBird
1. 项目概述:在4x8的像素矩阵上“复活”FlappyBird如果你玩过嵌入式开发,尤其是用那些小巧的微控制器板子,可能会觉得游戏开发离它们很远——资源有限,没有图形库,怎么搞?但恰恰是这种限制,最能…...

【实战排错】Vivado 综合卡死与“PID not specified”的深度诊断与修复
1. 故障现象与初步排查 最近在跑Vivado综合时,突然遇到一个让人头疼的问题:综合进程莫名其妙卡死,日志里还跳出"PID not specified"的错误提示。这种情况相信不少FPGA工程师都遇到过,特别是项目紧急的时候,这…...

Armv8-A内存模型特性寄存器详解与应用
1. Armv8-A内存模型特性寄存器概述在Armv8-A架构中,内存模型特性寄存器(Memory Model Feature Registers,简称MMFR)是一组关键的系统寄存器,用于描述处理器实现的内存管理功能特性。这些寄存器采用只读访问模式&#x…...

Arm SystemReady ACS测试指南与硬件兼容性认证
1. SystemReady Band ACS测试概述 SystemReady Band是Arm公司推出的一套硬件兼容性认证标准,专门针对基于Arm架构的计算设备设计。这套标准的核心理念是确保采用Arm处理器的设备能够无缝运行主流操作系统,包括Linux发行版、Windows和各种BSD变体。作为硬…...

java微服务驱动的社区平台:友猫社区的功能模块与实现逻辑
一、项目概述 友猫社区平台是由宠友信息技术有限公司研发的一体化社区生态系统,结合了内容分享、即时通讯、社交关系链与商城电商等功能。平台采用前后端分离架构,以高可扩展性、灵活配置与多端兼容性为设计核心,能够适应不同类型的企业及创…...

英矽智能对标宁德时代,AI 制药规模化复制难题待解!
AI 制药巨头“朋友圈”扩大AI 制药巨头的“朋友圈”越来越大了。“港股 AI 制药一哥”英矽智能日前宣布与谷歌云达成战略合作,要把 Gemini 大模型塞进自家 Pharma.AI 平台。这意味着英矽智能已不再满足于做一家“卖算法的”公司,而是要把自己变成药物发现…...

对话式AI智能中继与编排框架:构建高可用AI应用的核心架构
1. 项目概述:一个面向对话式AI的智能中继与编排框架最近在折腾一个挺有意思的开源项目,叫ChatAgentRelay。乍一看这个名字,可能觉得它又是一个聊天机器人框架,但深入把玩之后,我发现它的定位其实更精准,也更…...

隔热型防火入户门 烟气阻隔密封构造原理
在高层住宅建筑消防设计体系中,防火入户门是分隔防火分区、阻断烟火蔓延的核心构件,其中隔热型防火入户门凭借优异的耐火性能与烟气阻隔能力,成为民用住宅工程的标配产品,其密封构造设计直接决定防火隔烟效果与消防验收合规性。隔…...