CCF 202104-2:邻域均值--C++
#include<iostream>
#include<bits/stdc++.h>using namespace std;int A[601][601];
int n;//长宽都为n个像素double FindNeighborSum(int i,int j,int r,int A[][601])
{int sum=0;//像素和 int gs=0;//领域 中的像素个数 for(int x=i-r;x<=i+r;x++)//找到每一个领域像素点 {for(int y=j-r;y<=j+r;y++){if(x>=0&&x<n){if(y>=0&&y<n){sum+=A[x][y];gs++;}}}}double result=(double)sum/gs;//要用double不能用int,不然等于t的数量会变多 return result;//
}int main()
{int L;//像素的取值范围int r;//领域的范围int t;//阈值,当领域内的均值小于或等于阈值t时是较暗区域cin>>n>>L>>r>>t;for(int i=0;i<n;i++){for(int j=0;j<n;j++)cin>>A[i][j];}int sum=0;//记录较暗区域个数 for(int i=0;i<n;i++){for(int j=0;j<n;j++)//对每一个像素点分析 {if(FindNeighborSum(i,j,r,A)<=t) sum++;}}cout<<sum;return 0;
}暴力求解:70分,要返回一个double类型的值,不然的话有些不是较暗区域的点也会被计为较暗区域
原本我想 分区域来运算,当邻域像素点个数为最大值(2*r+1)*(2*r+1)时用二维差分,否则用暴力
但是还是会超时
#include<iostream>
#include<bits/stdc++.h>using namespace std;int A[601][601];
int n;//长宽都为n个像素int d[601][601];//记录(i,j)点的前缀和 double FindNeighborSum(int i,int j,int r,int A[][601])
{int suml=0;//像素和 int gs=0;//领域 中的像素个数 for(int x=i-r;x<=i+r;x++)//找到每一个领域像素点 {for(int y=j-r;y<=j+r;y++){if(x>=0&&x<n){if(y>=0&&y<n){suml+=A[x][y];gs++;}}}}double result=(double)suml/gs;//要用double不能用int,不然等于t的数量会变多 return result;//
}int main()
{int L;//像素的取值范围int r;//领域的范围int t;//阈值,当领域内的均值小于或等于阈值t时是较暗区域memset(d,0,sizeof d);//将d清零 cin>>n>>L>>r>>t;for(int i=0;i<n;i++){for(int j=0;j<n;j++){cin>>A[i][j];d[i][j]=d[i][j-1]+d[i-1][j]-d[i-1][j-1]+A[i][j]; //cout<<d[i][j]<<endl;}}int sum=0;//记录较暗区域个数 int NeighborSum=0;//记录邻域中像素数值之和 double NeighborAvg=0;for(int i=0;i<n;i++){for(int j=0;j<n;j++)//对每一个像素点分析 { if(i-r>=0&&i+r<n&&j-r>=0&&j+r<n)//分区域来运算,当邻域像素点个数为最大值(2*r+1)*(2*r+1)时用差分,否则用暴力{NeighborSum=d[i+r][j+r]-d[i+r][j-r-1]-d[i-r-1][j+r]+d[i-r-1][j-r-1];NeighborAvg=(double)NeighborSum/((2*r+1)*(2*r+1));if(NeighborAvg<=t) sum++;}else{//邻域的上下左右有些地方不全 if(FindNeighborSum(i,j,r,A)<=t) sum++; } }}cout<<sum;return 0;
}从上面的分区域到下面的满分优化,关键是怎么得到邻域的像素点个数,上面的分区域方法如果所判断的像素点(i,j)的邻域没有缺少,即邻域像素点个数达到最大(2*r-1)*(2*r-1),如果(i,j)的邻域不完整,那就暴力的一个一个判断使得gs++来得到邻域中像素点的个数。
可以通过邻域的上下左右来求得邻域中像素点的个数
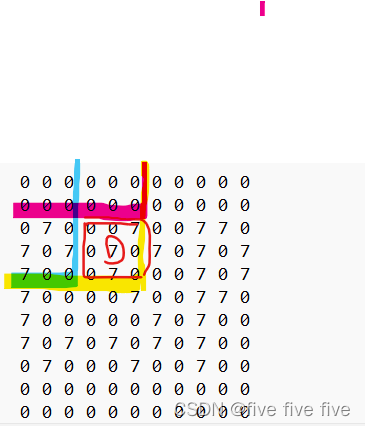
如图,如果此时红色笔圈起来的数7是当前判断到的像素,设为(i,j),r=2, 那么(i,j)的邻域就应该是如图画的正方形,红色直线=left=j-r; 橙色直线=right=j+r ,蓝色直线=top=i-r;绿色直线=buttom=i+r;
所以这个邻域中像素点的个数 等于 (right-left+1)*(buttom-top+1)
这是理想的情况,即邻域是完整的
当邻域不完整时,应该通过判断来调整上下左右的取值,但是像素点个数求法还是一样的
if(i-r<0)//上边不够
top=0;
else//上边够那么可能下边不够
{
if(i+r>=n)//下边不够
buttom=n-1;
}
if(j-r<0)//左边不够
left=0;
else
if(j+r>=n)//右边不够
right=n-1;
再用前缀和来求解一个区域中像素点的数值和

优化:用二维差分,记录一下我的第一次自己优化
#include<iostream>
#include<bits/stdc++.h>using namespace std;int A[601][601];
int n;//长宽都为n个像素int d[601][601];//记录(i,j)点的前缀和 int main()
{int L;//像素的取值范围int r;//领域的范围int t;//阈值,当领域内的均值小于或等于阈值t时是较暗区域memset(d,0,sizeof d);//将d清零 cin>>n>>L>>r>>t;for(int i=0;i<n;i++){for(int j=0;j<n;j++){cin>>A[i][j];d[i][j]=d[i][j-1]+d[i-1][j]-d[i-1][j-1]+A[i][j]; //cout<<d[i][j]<<endl;}}int sum=0;//记录较暗区域个数 int NeighborSum=0;//记录邻域中像素数值之和 double NeighborAvg=0;int Neighbor=0;//记录邻域中像素个数 int left=0,right=0,top=0,buttom=0;//记录邻域的上下左右,方便计数 for(int i=0;i<n;i++){for(int j=0;j<n;j++)//对每一个像素点分析 {//首先将邻域当作理想情况,后面通过判断再调整top=i-r;buttom=i+r;left=j-r;right=j+r;if(i-r<0)//上边不够top=0;else//上边够那么可能下边不够 {if(i+r>=n)//下边不够 buttom=n-1; }if(j-r<0)//左边不够left=0;else if(j+r>=n)//右边不够right=n-1; Neighbor=(buttom-top+1)*(right-left+1); //邻域中像素点个数 NeighborSum=d[buttom][right]-d[buttom][left-1]-d[top-1][right]+d[top-1][left-1];//cout<<NeighborSum<<endl;NeighborAvg=(double)NeighborSum/Neighbor;if(NeighborAvg<=t) sum++;} }cout<<sum;return 0;
}我自己的理解,之前看过一篇特别好的差分法的文章,可惜找不到了
差分法就是在输入的时候求得对应位置的前缀和,当你需要对某个区间或区域进行加减时不用一个一个加减,直接对前缀和数组操作
一维差分:
int n=10;
for(int i=0;i<n;i++)
{
cin>>A[i];
d[i]=d[i-1]+A[i];//前缀和数组,代表第i位以及前面所有数据的和
}//对[1,5]的数据全部加1
d[1]+=1;
d[5]-=1;//只需要对区间两端的前缀和数组进行操作即可
//A[i]=d[i]-d[i-1];//得到新的加一之和的值例题:非零段划分202109-2 非零段划分--C++-CSDN博客
二维差分:
for(int i=0;i<n;i++)
{
for(int j=0;j<n;j++)
{
cin>>A[i][j];
d[i][j]=d[i][j-1]+d[i-1][j]-d[i-1][j-1]+A[i][j];
}
}当i=3,j=3时,d[i][j]就是如图左上角的所有数之和

这样我们通过输入就可以得到每一个数的二维前缀和,当我们想要求一个区域的所有数之和(在本题中相对于求邻域中的所有数值之和),当我们想要求红色区域的所有数之和,可以用黄色区域所有数之和即d[4][5],减去蓝色区域所有数之和即d[4][2],再减去粉色区域所有数之和即d[1][5],重复减去的区域要加回来,加上d[2][2],就可以得到想要求的区域的所有数之和
差分法~超详细(公式+原理+例题)-CSDN博客
相关文章:
CCF 202104-2:邻域均值--C++
#include<iostream> #include<bits/stdc.h>using namespace std;int A[601][601]; int n;//长宽都为n个像素double FindNeighborSum(int i,int j,int r,int A[][601]) {int sum0;//像素和 int gs0;//领域 中的像素个数 for(int xi-r;x<ir;x)//找到每一个领域像素…...
基于JAVA+SpringBoot+Vue的前后端分离的医院信息智能化HIS系统
✌全网粉丝20W,csdn特邀作者、博客专家、CSDN新星计划导师、java领域优质创作者,博客之星、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和毕业项目实战✌ 🍅文末获取项目下载方式🍅 一、项目背景介绍: 随着科技的不断发展&a…...

Kotlin Flow 操作符
前言 Kotlin 拥有函数式编程的能力,使用Kotlin开发,可以简化开发代码,层次清晰,利于阅读。 然而Kotlin拥有操作符很多,其中就包括了flow。Kotlin Flow 如此受欢迎大部分归功于其丰富、简洁的操作符,巧妙使…...
HarmonyOS4.0从零开始的开发教程08构建列表页面
HarmonyOS(六)构建列表页面 List组件和Grid组件的使用 简介 在我们常用的手机应用中,经常会见到一些数据列表,如设置页面、通讯录、商品列表等。下图中两个页面都包含列表,“首页”页面中包含两个网格布局ÿ…...

分布式环境下的session 共享-基于spring-session组件和Redis实现
1、问题概述 不是所有的项目都是单机模式的,当一个项目服务的局域比较广,用户体量比较大,数据量较大的时候,我们都会将项目部署到多台服务器上,这些个服务器都是分布在不同的区域,这样实现了项目的负载和并…...
docker基本管理和相关概念
docker是什么? docker是开源的应用容器引擎。基于go语言开发的。运行在Linux系统当中开源轻量级的“虚拟机”。 docker的容器技术可以在一台主机上轻松的为任何应用创建一个轻量级的,可移植的,自给自足的容器。 docker的宿主机是Linux系统…...
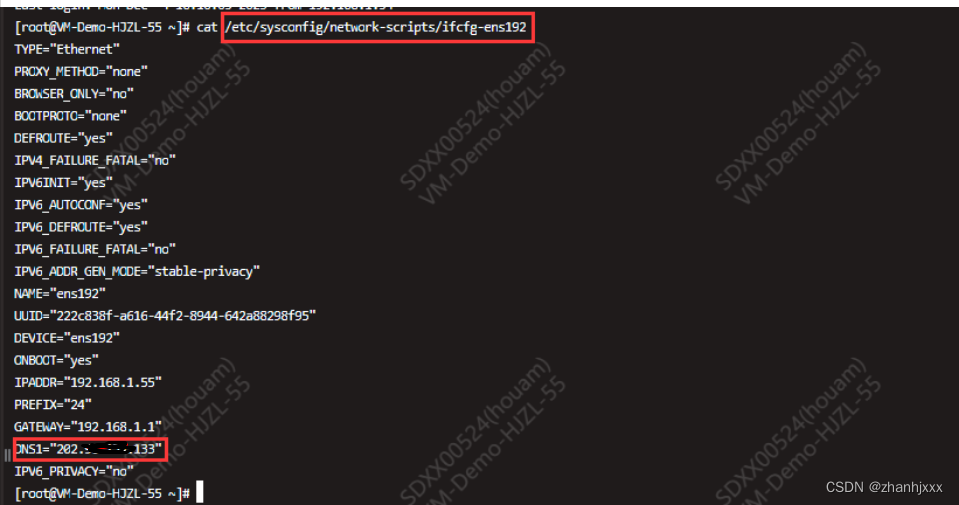
Linix服务器添加dns解析
Linix开通互联网域名地址出现,如下错误: 需要访问的服务器上添加dns解析 vim /etc/sysconfig/network-scripts/ifcfg-ens192 添加如下配置: DNS1202.96.134.13 重启网卡: systemctl restart network 注意如果是docker服务部署…...
llama.cpp部署(windows)
一、下载源码和模型 下载源码和模型 # 下载源码 git clone https://github.com/ggerganov/llama.cpp.git# 下载llama-7b模型 git clone https://www.modelscope.cn/skyline2006/llama-7b.git查看cmake版本: D:\pyworkspace\llama_cpp\llama.cpp\build>cmake --…...

STM32CubeMX+micro_ros_stm32cubemx_utils库
GitHub - micro-ROS/micro_ros_stm32cubemx_utils at humble 这个就是下载这个代码库以后的文件结构。其中sample_project.ioc就是平时STM32CubeMX的工程文件。类似于visual studio里面的项目文件 。打开以后是这个样子的: 可以看到跟本文后面的那些配置是几乎一模一…...
C语言有哪些预处理操作?
C语言的预处理是在编译之前对源代码进行处理的阶段,它主要由预处理器完成。预处理器是一个独立的程序,它负责对源代码进行一些文本替换和处理,生成经过预处理的代码。以下是C语言预处理的一些重要特性: 1,头文件包含 #…...

数据结构算法-希尔排序算法
引言 在一个普通的下午,小明和小森决定一起玩“谁是老板”的扑克牌游戏。这次他们玩的可不仅仅是娱乐,更是要用扑克牌来决定谁是真正的“大老板”。 然而,小明的牌就像刚从乱麻中取出来的那样,毫无头绪。小森的牌也像是被小丑掷…...

php使用vue.js实现省市区三级联动
参考gpt 有问题问gpt 实现效果 现省市区三级联动的方法可以使用PHP结合AJAX异步请求来实现。下面是一个简单的示例代码: HTML部分: <!DOCTYPE html> <html> <head><meta charset"UTF-8"><title>省市区三级联动…...

软件测试:测试用例八大要素模板
一、通用测试用例八要素 1、用例编号; 2、测试项目; 3、测试标题; 4、重要级别; 5、预置条件; 6、测试输入; 7、操作步骤; 8、预期输出 二、具体分析通用测试用例八要素 1、用例编号 一般是数字…...
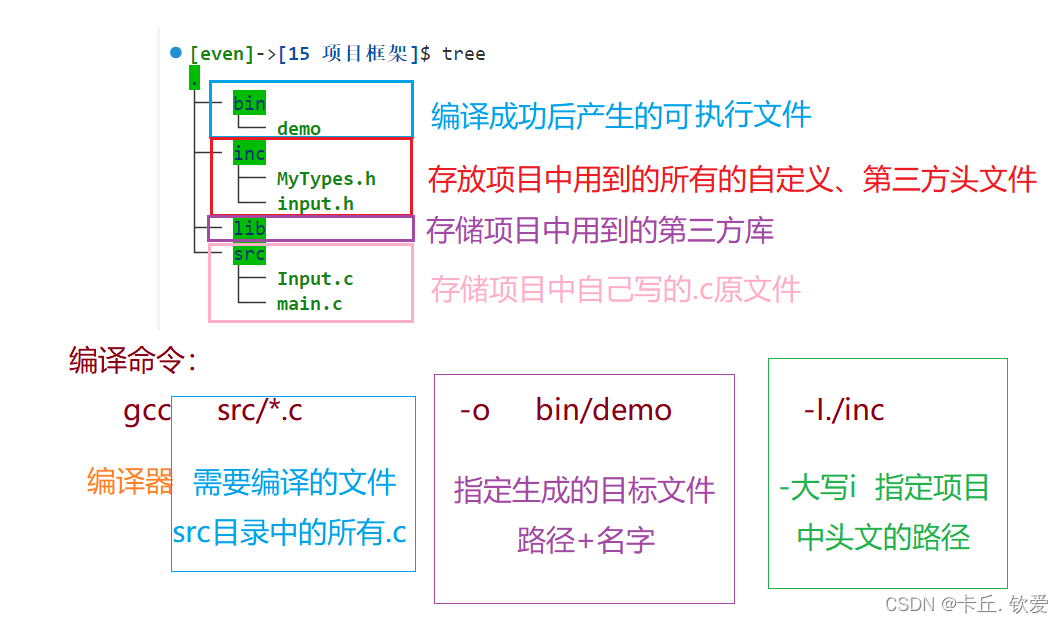
C语言进阶之路之顶峰相见篇
目录 一、学习目标 二、宏定义 预处理 宏的概念 带参宏 无值宏定义 三、条件编译 条件编译 条件编译的使用场景 四、头文件 头文件的作用 头文件的内容 头文件的基础语句: GCC编译器的4个编译步骤: 总结 一、学习目标 掌握宏定义含义和用…...
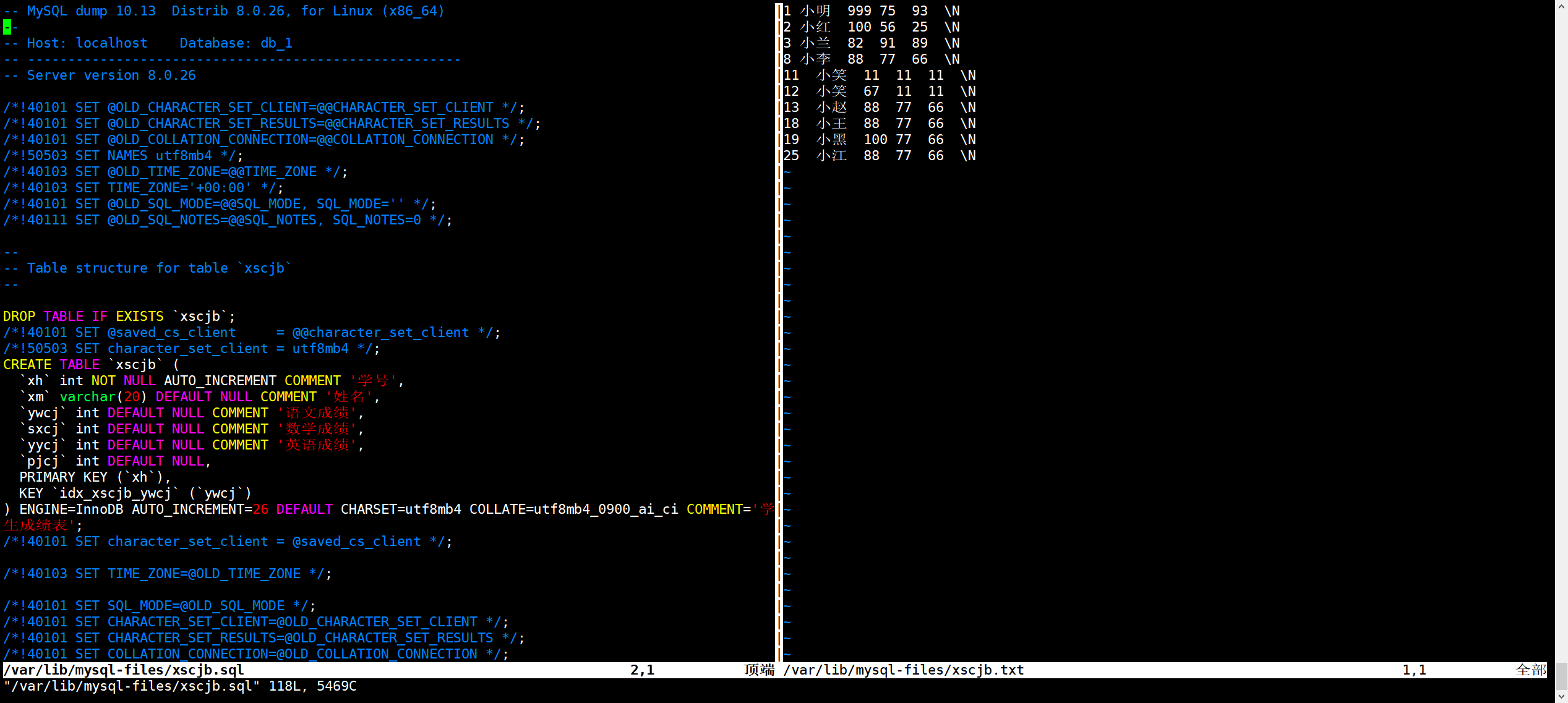
第76讲:MySQL数据库中常用的命令行工具的基本使用
文章目录 1.mysql客户端命令工具2.mysqladmin管理数据库的客户端工具3.mysqlbinlog查看数据库中的二进制日志4.mysqlshow统计数据库中的信息5.mysqldump数据库备份工具6.mysqllimport还原备份的数据7.source命令还原SQL类型的备份文件 MySQL数据库提供了很多的命令行工具&#…...

初级数据结构(二)——链表
文中代码源文件已上传:数据结构源码 <-上一篇 初级数据结构(一)——顺序表 | NULL 下一篇-> 1、链表特征 与顺序表数据连续存放不同,链表中每个数据是分开存放的,而且存放的位置尤其零散&#…...
Kubernetes架构及核心部件
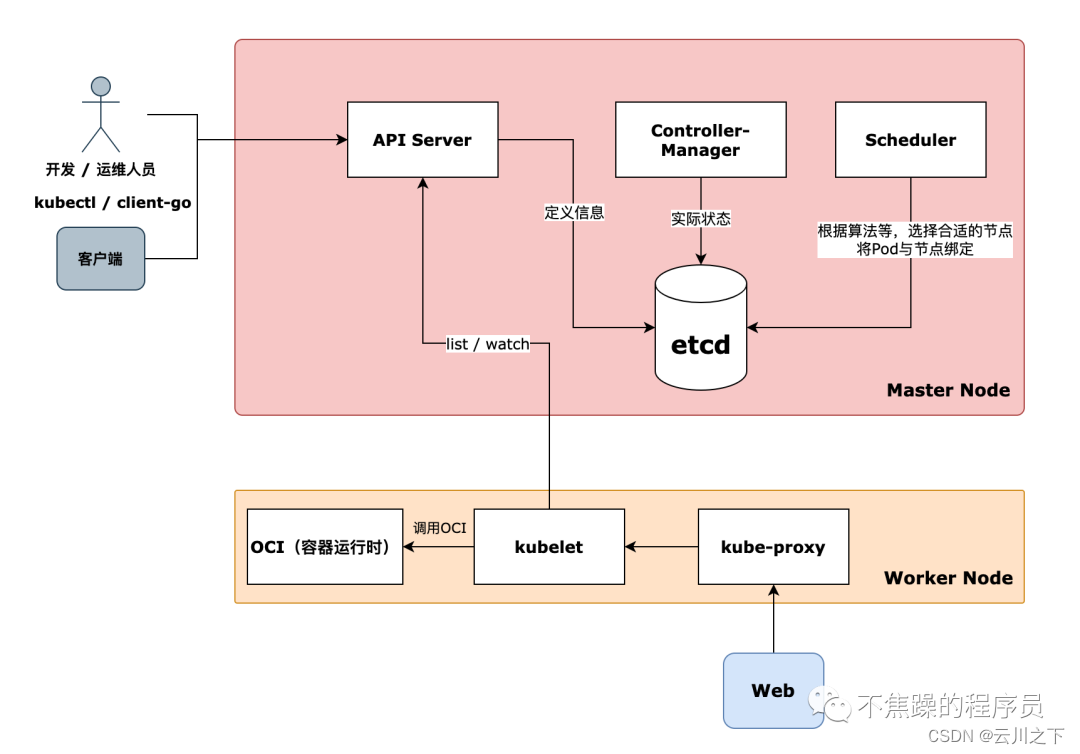
文章目录 1、Kubernetes集群概述1.1、概述1.2、通过声明式API即可 2、Kubernetes 集群架构2.1、Master 组件2.1.1、API Server2.1.2、集群状态存储2.1.3、控制器管理器2.1.4、调度器 2.2、Worker Node 组件2.2.1、kubelet2.2.2、容器运行时环境2.2.3、kube-proxy 2.3、图解架构…...

RAW和YUV的区别
RAW是指未经过任何压缩或处理的原始图像数据。在摄像头中,原始图像数据可以是来自图像传感器的未经处理的像素值。这些原始数据通常以一种Bayer模式的形式存在,其中每个像素仅包含一种颜色信息(红色、绿色或蓝色),需要…...
)
Linux常见问题-获取日志方法总结(Ubuntu/Debian)
1 日志基本路径和基础查看方法 在 Ubuntu 或 Debian 11 系统中,可以通过不同的日志文件来获取系统日志和内核日志。日志常见路径如下: /var/log/syslog:包含系统的整体日志,包括各种系统事件和服务日志。/var/log/auth.log&…...

【机器视觉技术栈】03 - 镜头
镜头 定焦镜头变焦镜头远心镜头 FA镜头与远心镜头的区别? 焦距越小畸变程度越大,精度要求不高的场景可以使用焦距大的FA镜头做尺寸测量,但焦距越大带来的问题就是整个机械设备越大。精度高的场景使用远心镜头进行尺寸测量。 光学基础知识…...

Android Native逆向实战:Frida与IDA协同分析ART内存模型
1. 这不是“游戏外挂开发指南”,而是一次对移动应用安全边界的诚实测绘你打开手机里那个图标是蓝色小鸟、背景是木头和石头的《愤怒的小鸟》——它早已不是2010年那个靠物理引擎惊艳全场的休闲游戏,而是被无数人遗忘在角落、却仍静静躺在旧安卓设备里的“…...

HAR模型调优实战:为何精心调优的线性模型能击败复杂机器学习?
1. 项目概述:当HAR模型遇上机器学习,一场关于“调优”的较量在金融计量和量化交易领域,预测明天的市场波动率,就像试图预测一场风暴的强度,充满了挑战但也至关重要。无论是为了给衍生品定价、管理投资组合风险…...

终极指南:如何用WeChatIntercept实现macOS微信防撤回功能
终极指南:如何用WeChatIntercept实现macOS微信防撤回功能 【免费下载链接】WeChatIntercept 微信防撤回插件,一键安装,仅MAC可用,支持v3.7.0微信 项目地址: https://gitcode.com/gh_mirrors/we/WeChatIntercept 还在为微信…...

5分钟掌握微信防撤回:WeChatIntercept新手完整指南
5分钟掌握微信防撤回:WeChatIntercept新手完整指南 【免费下载链接】WeChatIntercept 微信防撤回插件,一键安装,仅MAC可用,支持v3.7.0微信 项目地址: https://gitcode.com/gh_mirrors/we/WeChatIntercept 还在为错过微信撤…...

随机森林回归与PISO算法融合:实现CFD在线模型修正与状态估计
1. 项目概述:当随机森林“遇见”PISO算法在计算流体动力学(CFD)的日常工作中,我们常常面临一个核心矛盾:物理模型的普适性与特定场景的精确性难以兼得。传统的湍流模型,无论是雷诺平均纳维-斯托克斯&#x…...

基于最优潮流与随机噪声的欧洲电网合成数据生成方法
1. 项目概述:为什么我们需要一个“人造”的欧洲电网?在电力系统这个行当里干了十几年,我越来越觉得,我们正处在一个尴尬的十字路口。一方面,以深度学习为代表的机器学习技术,正以前所未有的热情涌入电力系统…...

84、CAN FD数据链路层革新:可变数据场长度与DLC编码
004、CAN FD数据链路层革新:可变数据场长度与DLC编码 一、一个让我熬夜的调试现场 去年做某新能源车BMS项目,客户要求把电池包内部温度数据从8字节扩展到32字节。我心想简单,传统CAN报文拆成4帧发呗。结果现场联调时,主控那边死活收不到完整数据——不是丢帧就是乱序,最…...

Julia语言在科学机器学习领域的优势、挑战与实践指南
1. 科学机器学习:当物理定律遇见数据驱动如果你和我一样,长期在科学计算和机器学习的交叉领域“搬砖”,那你一定对“两难困境”深有体会。我们既需要Python那样灵活、易上手的语法来快速验证物理模型和算法原型,又渴望C级别的极致…...

AI社交对话设计:如何避免商业场景中的期望违背与尴尬感
1. 项目概述:当AI的“聪明”变成商业场景的“尴尬”最近几年,AI驱动的社交对话机器人,从智能客服到虚拟销售助理,几乎成了商业互动的标配。我们总在谈论它们如何提升效率、降低成本、提供7x24小时服务。但作为一名在数字化营销和客…...

Unity安装包瘦身实战:从2.3GB到680MB的工程化治理
1. 为什么一个500MB的Unity项目打包后会变成3GB?——安装包膨胀的真实逻辑“Unity安装包减肥”这六个字,听起来像在给软件做瑜伽,但实际是每个上线前夜都在咬牙硬扛的生存战。我做过7个已上线的Unity手游项目,最深的体会是&#x…...