【STM32】TIM定时器编码器
1 编码器接口简介
Encoder Interface 编码器接口
编码器接口可接收增量(正交)编码器的信号,根据编码器旋转产生的正交信号脉冲,自动控制CNT自增或自减,从而指示编码器的位置、旋转方向和旋转速度
接收正交信号,自动执行CNT自增或者自减,编码器接口相当于带有方向控制的外部时钟,同时控制着CNT的计数时钟和计数方向。每隔一段时间去取一次CNT的值,再把CNT清零,每次取出来的值就表示编码器的速度。(测频法)
每个高级定时器和通用定时器都拥有1个编码器接口
两个输入引脚借用了输入捕获的通道1和通道2(CH1和CH2)
1.1 正交编码器
正交编码器一般可以测量位置或者带有方向的速度值
旋转编码器:用来测量位置、速度或旋转方向的装置,当其旋转轴旋转时,其输出端可以输出与旋转速度和方向对应的方波信号,读取方波信号的频率和相位信息即可得知旋转轴的速度和方向
类型:机械触点式/霍尔传感器式/光栅式

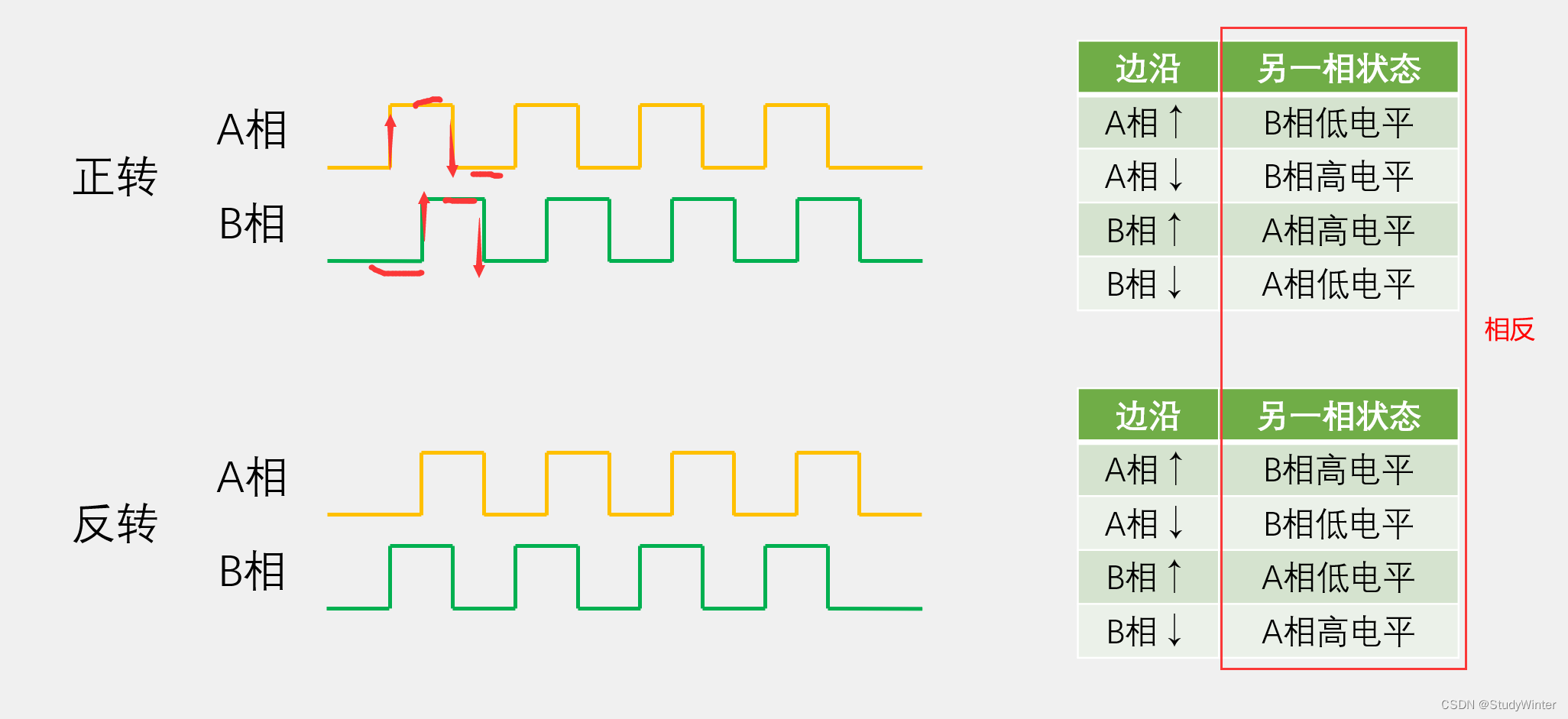
方波频率代表速度。正转时A相提前B相90°;反转时A相滞后B相90°
首先把A\相和B相的所有边沿作为计数器的计数时钟,出现边沿信号时就计数器自增或者自减;计数的方向由另一相的状态来确定。当出现某个边沿时,判断另一相高低电平,如果另一相的状态出现在上面这个表中,那就是正转,计数自增;否则就是反转,计数自减。这样就可以实现编码器接口的功能了。
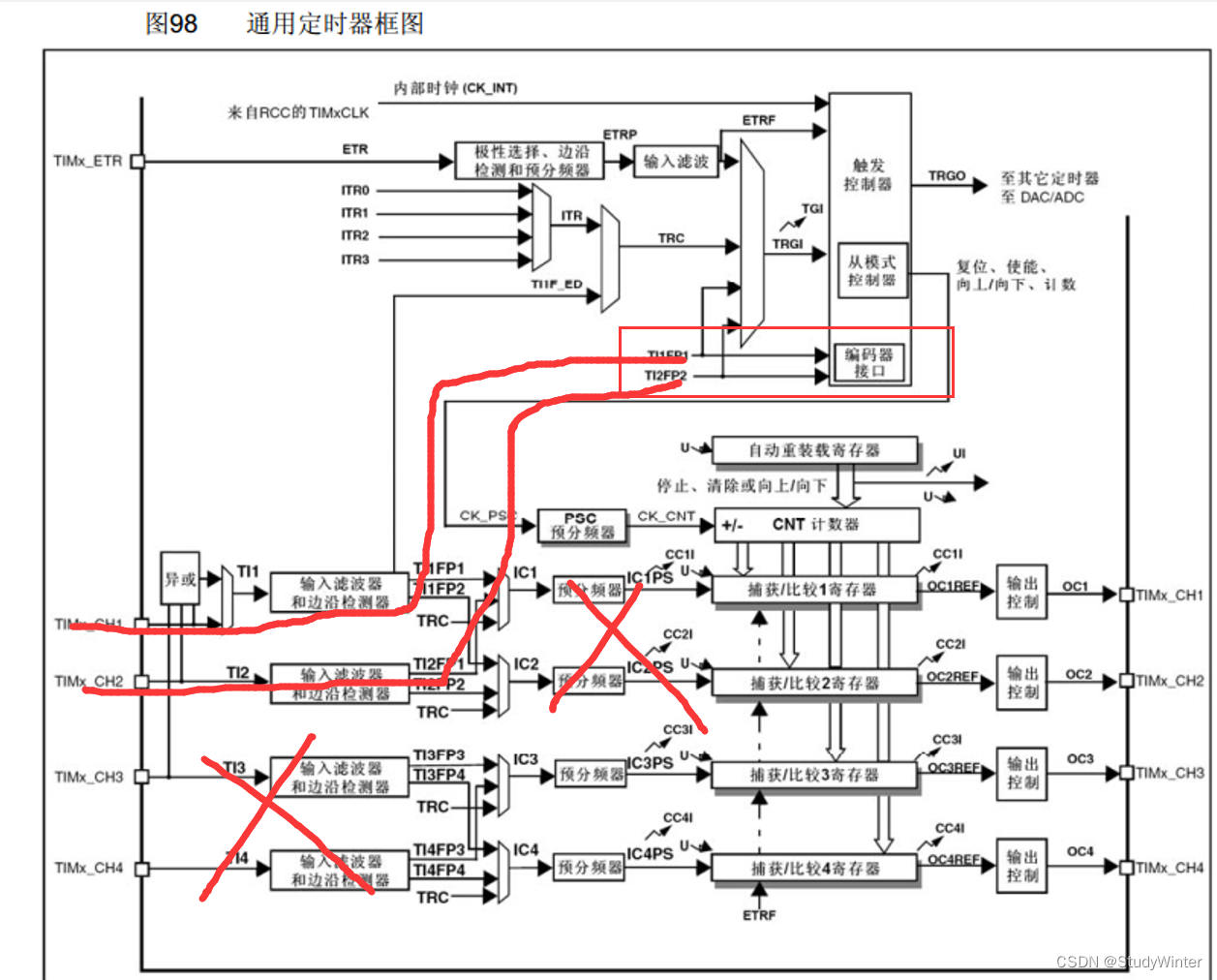
编码器接口有两个输入端,分别接到编码器的A相和B相,所以编码器的输入引脚就是定时器的CH1和CH2引脚。编码器的输出部分相当于从模式的控制器了,控制CNT的计数时钟和计数方向。计数器的自增和自减受编码器控制。
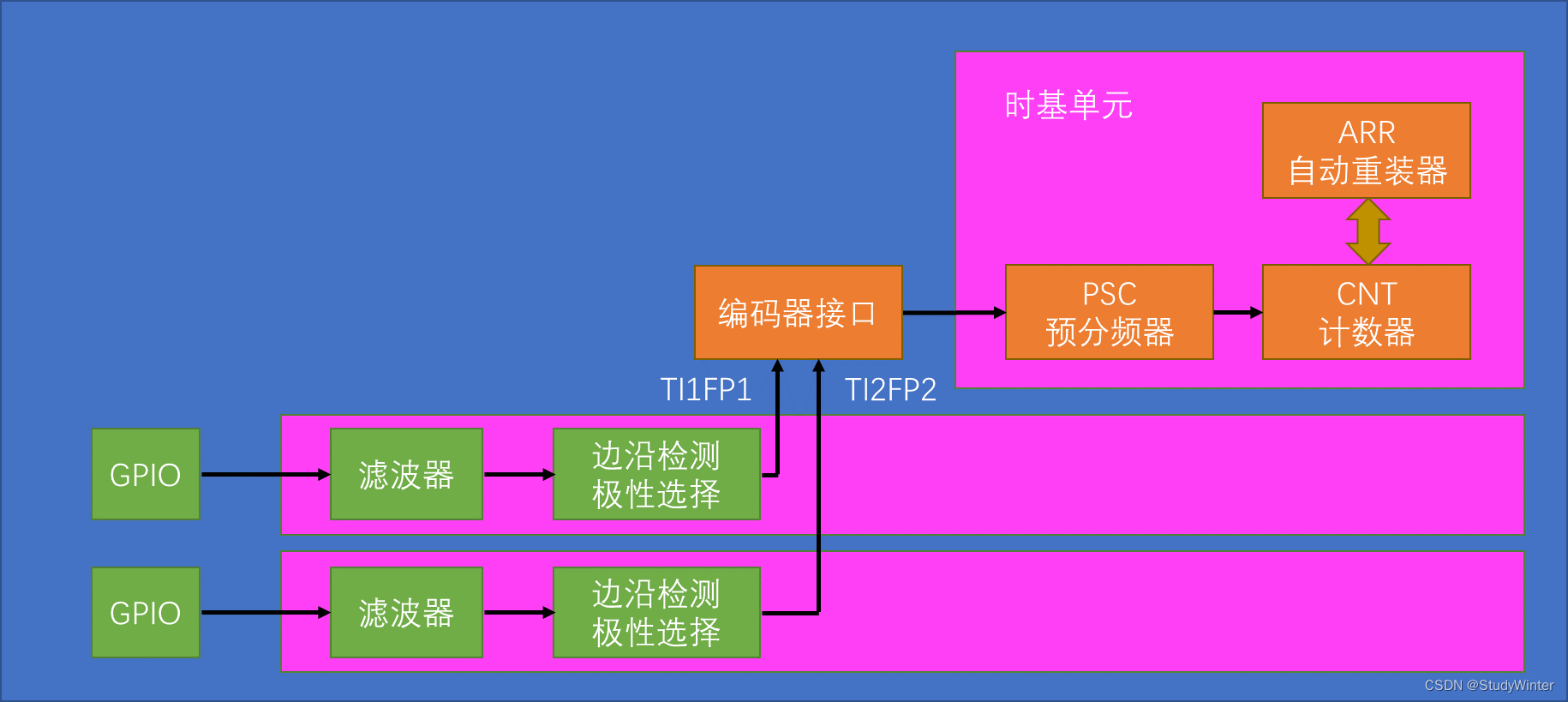
1.2 编码器接口基本结构
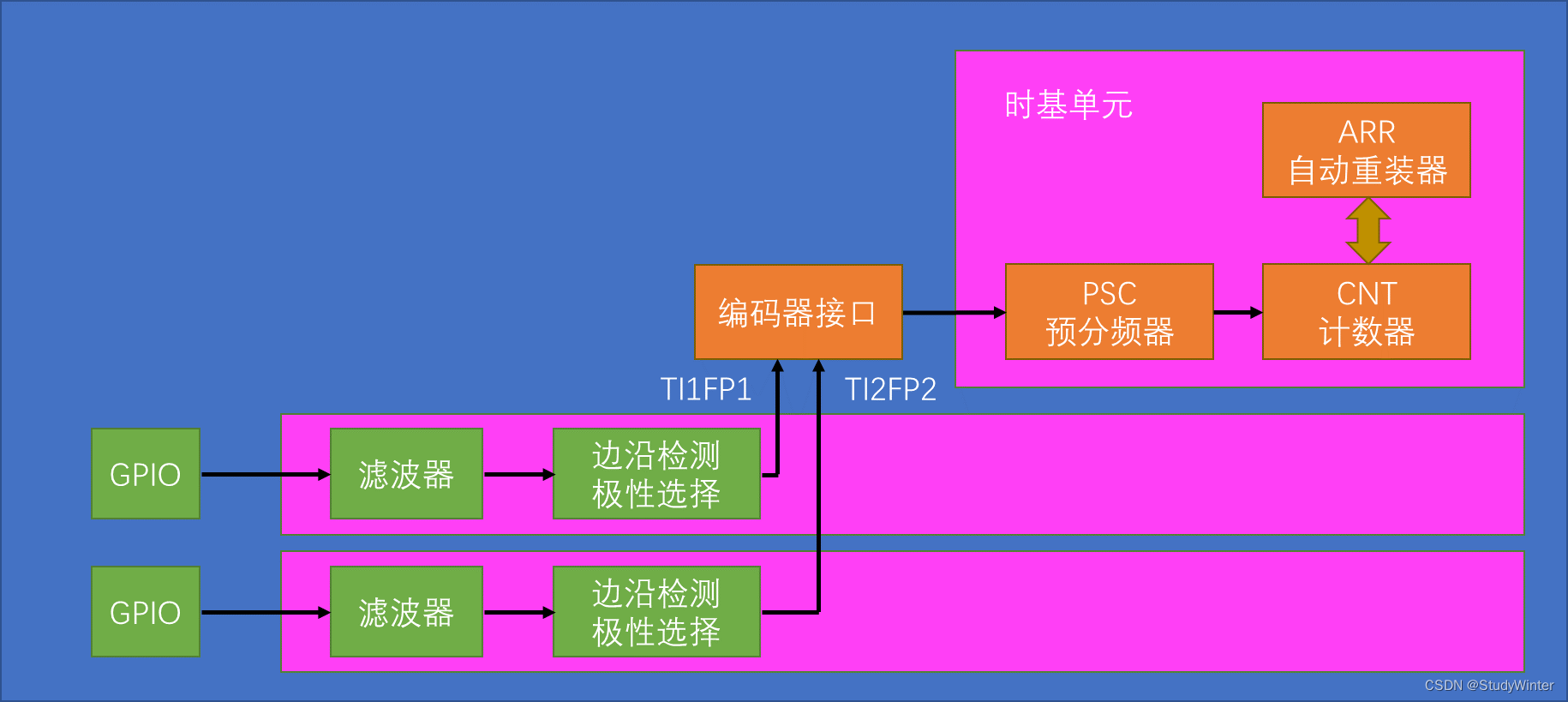
很清晰
1.3 工作模式

这里TI1FP1和TI2FP2接的就是AB相。计数和前面一样。

正转向上计数,反转向下计数。
1.4 实例图
均不反向,使用TI1和TI2都计数

很清晰。
TI1反向,TI2不反向。极性的变化对计数的影响。
这里的极性选择就是高低电平的极性选择了。如果选择上升沿的参数,就是信号直通过来,高低电平极性不反转;如果选择下降沿的参数,就是信号通过非门,高低电平反转。
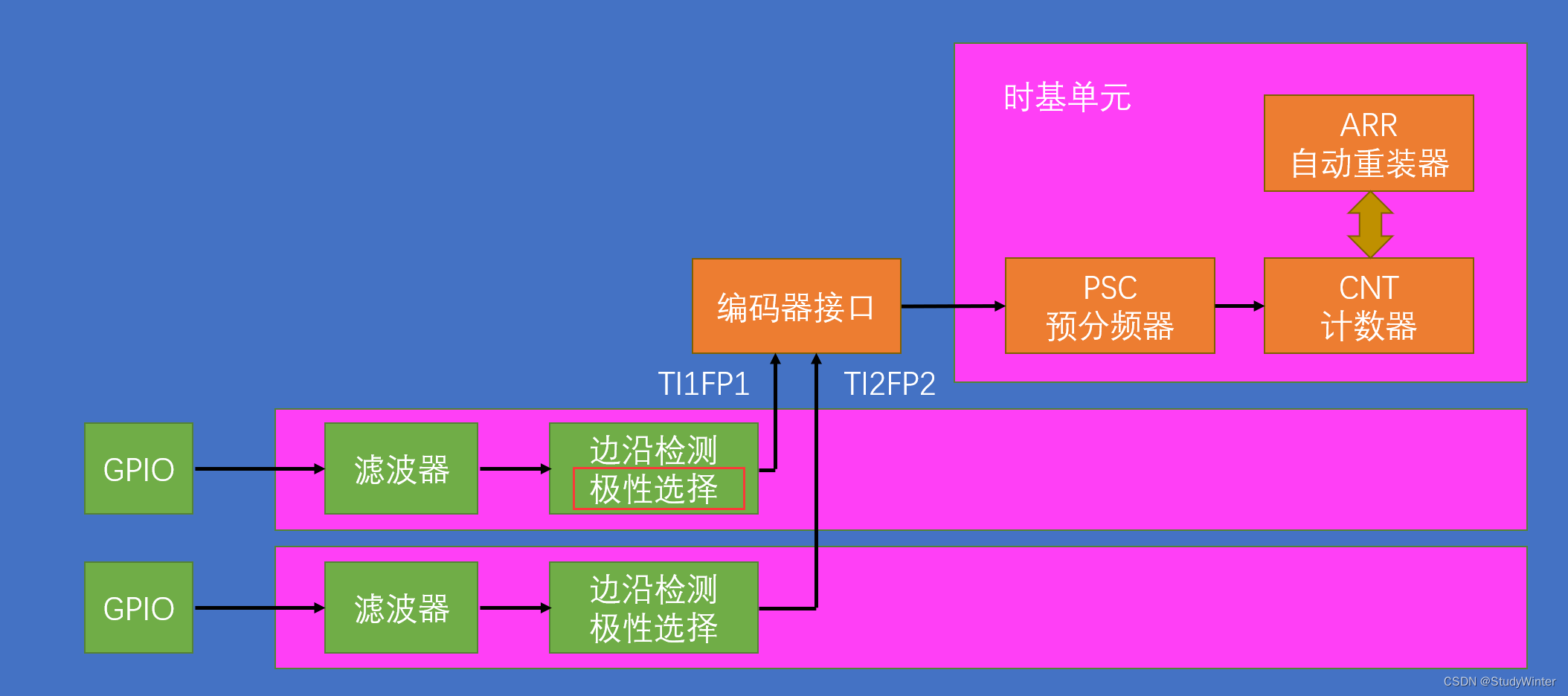

很清晰。
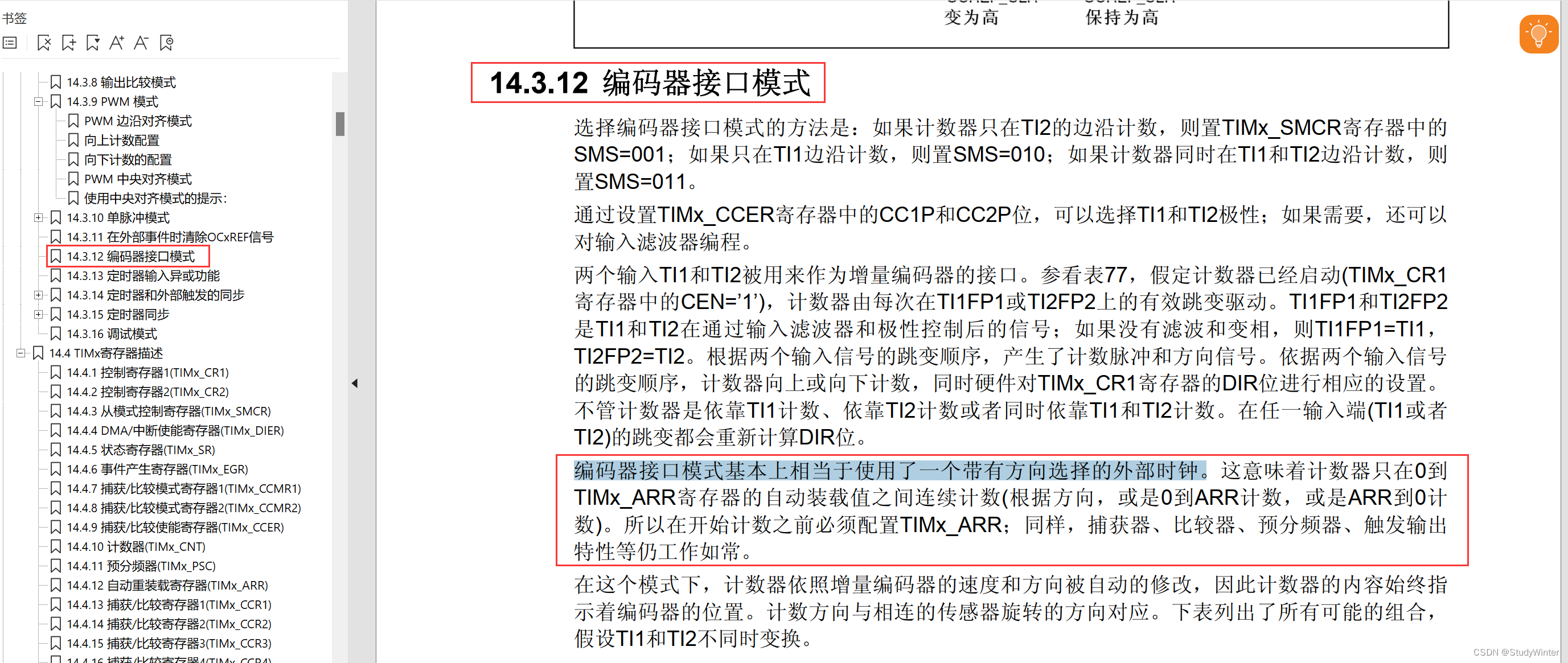
手册
2 编码器接口测速
2.1 接线图
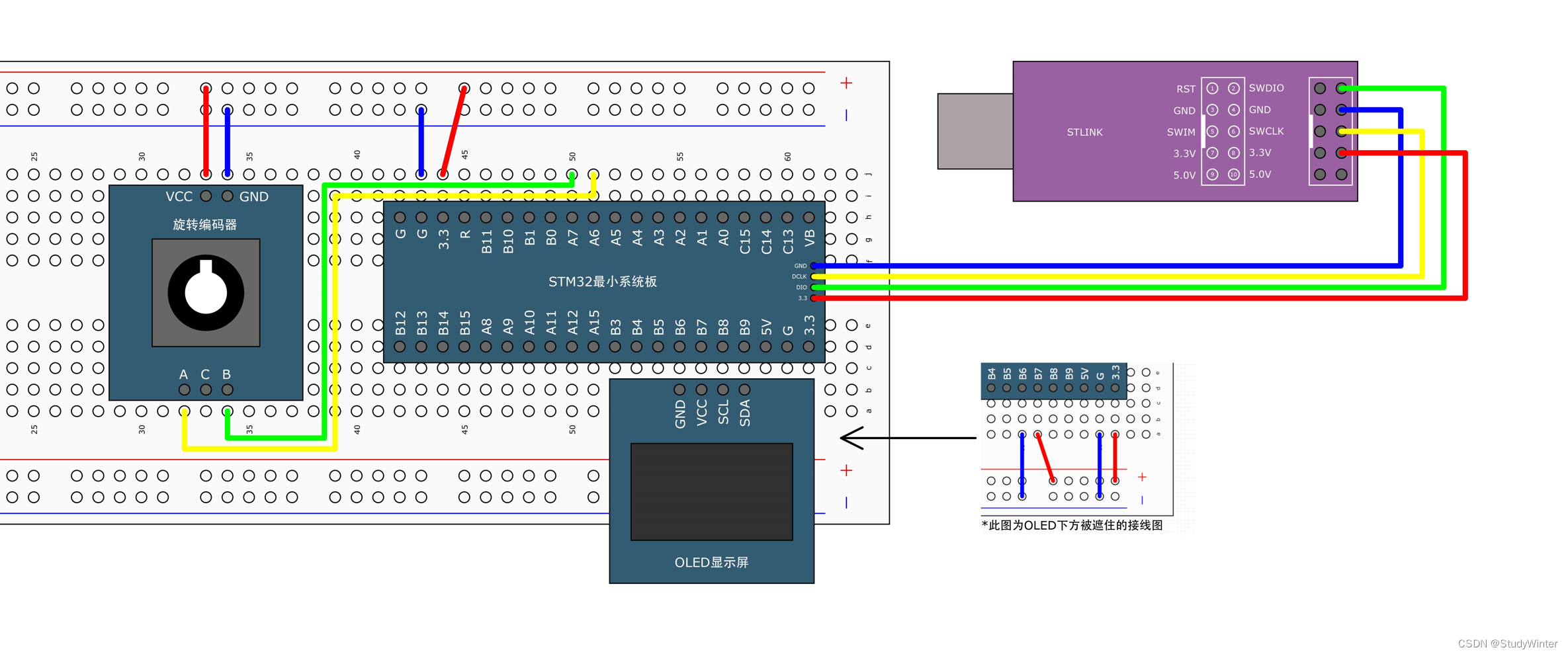
引脚定义

计划用TIM3的通道1和通道2
2.2 模块封装
按这个配置
库函数
// 定时器编码器接口配置
void TIM_EncoderInterfaceConfig(TIM_TypeDef* TIMx, uint16_t TIM_EncoderMode,uint16_t TIM_IC1Polarity, uint16_t TIM_IC2Polarity);版本一:Encoder.c
#include "stm32f10x.h" // Device header// 编码器接口初始化函数
void EnCoder_Init(void)
{// 1开启时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);// 2配置GPIOGPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU; // 上拉输入模式GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStruct);// 3配置时基单元TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;TIM_TimeBaseInitStruct.TIM_Prescaler = 1 - 1; // PSC预分频器的值,不分频TIM_TimeBaseInitStruct.TIM_Period = 65536 - 1; // ARR自动重装器的值 TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up; // 向上计数,没有用TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1; // 不分频TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0; // 重复计数器的值TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStruct);// 4配置输入捕获单元(只有极性和滤波器两个参数有用)TIM_ICInitTypeDef TIM_ICInitStruct;TIM_ICStructInit(&TIM_ICInitStruct); // 结构体初始化TIM_ICInitStruct.TIM_Channel = TIM_Channel_1; // 通道1TIM_ICInitStruct.TIM_ICFilter = 0xF; // 滤波器
// TIM_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Rising; // 和后面重复
// TIM_ICInitStruct.TIM_ICSelection = TIM_ICSelection_DirectTI; // 无作用
// TIM_ICInitStruct.TIM_ICPrescaler = TIM_ICPSC_DIV1; // 无作用TIM_ICInit(TIM3, &TIM_ICInitStruct);TIM_ICInitStruct.TIM_Channel = TIM_Channel_2;TIM_ICInitStruct.TIM_ICFilter = 0xF;// TIM_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Rising; // 和后面重复TIM_ICInit(TIM3, &TIM_ICInitStruct);// 5配置编码器接口模式// TIM_ICPolarity_Rising这个通道不反向,TIM_ICPolarity_Falling这个通道反向// 后两个参数相反就是方向相反TIM_EncoderInterfaceConfig(TIM3, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);// 6启动定时器TIM_Cmd(TIM3, ENABLE);
}// 获取CNT的值
int16_t Encoder_Get(void)
{return TIM_GetCounter(TIM3);
}版本二:Encoder.c
#include "stm32f10x.h" // Device header// 编码器接口初始化函数
void EnCoder_Init(void)
{// 1开启时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);// 2配置GPIOGPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU; // 上拉输入模式GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStruct);// 3配置时基单元TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;TIM_TimeBaseInitStruct.TIM_Prescaler = 1 - 1; // PSC预分频器的值,不分频TIM_TimeBaseInitStruct.TIM_Period = 65536 - 1; // ARR自动重装器的值 TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up; // 向上计数,没有用TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1; // 不分频TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0; // 重复计数器的值TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStruct);// 4配置输入捕获单元(只有极性和滤波器两个参数有用)TIM_ICInitTypeDef TIM_ICInitStruct;TIM_ICStructInit(&TIM_ICInitStruct); // 结构体初始化TIM_ICInitStruct.TIM_Channel = TIM_Channel_1; // 通道1TIM_ICInitStruct.TIM_ICFilter = 0xF; // 滤波器
// TIM_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Rising; // 和后面重复
// TIM_ICInitStruct.TIM_ICSelection = TIM_ICSelection_DirectTI; // 无作用
// TIM_ICInitStruct.TIM_ICPrescaler = TIM_ICPSC_DIV1; // 无作用TIM_ICInit(TIM3, &TIM_ICInitStruct);TIM_ICInitStruct.TIM_Channel = TIM_Channel_2;TIM_ICInitStruct.TIM_ICFilter = 0xF;// TIM_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Rising; // 和后面重复TIM_ICInit(TIM3, &TIM_ICInitStruct);// 5配置编码器接口模式// TIM_ICPolarity_Rising这个通道不反向,TIM_ICPolarity_Falling这个通道反向// 后两个参数相反就是方向相反TIM_EncoderInterfaceConfig(TIM3, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);// 6启动定时器TIM_Cmd(TIM3, ENABLE);
}// 获取CNT的值
int16_t Encoder_Get(void)
{
// return TIM_GetCounter(TIM3);// 读取cnt,把cnt清零的逻辑int16_t temp = TIM_GetCounter(TIM3);TIM_SetCounter(TIM3, 0);return temp;
}2.3 主函数
版本一:主函数
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Timer.h"
#include "EnCoder.h"int main()
{OLED_Init(); // 初始化OLEDEnCoder_Init();
// Timer_Init(); // 初始化定时器OLED_ShowString(1, 1, "CNT:"); // 显示字符串while (1){OLED_ShowNum(1, 5, Encoder_Get(), 5); // 显示CNT计数器}
}版本二:主函数
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Timer.h"
#include "EnCoder.h"int16_t speed;int main()
{OLED_Init(); // 初始化OLEDEnCoder_Init();Timer_Init(); // 初始化定时器OLED_ShowString(1, 1, "speed:"); // 显示字符串while (1){OLED_ShowSignedNum(1, 7, speed, 5); // 显示CNT计数器}
}// 中断函数
void TIM2_IRQHandler(void)
{// 检测中断标志位,确保是设置的中断源触发的这个函数if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET){// 中断处理speed = Encoder_Get();// 清除中断标志TIM_ClearITPendingBit(TIM2, TIM_IT_Update);}
}相关文章:
【STM32】TIM定时器编码器
1 编码器接口简介 Encoder Interface 编码器接口 编码器接口可接收增量(正交)编码器的信号,根据编码器旋转产生的正交信号脉冲,自动控制CNT自增或自减,从而指示编码器的位置、旋转方向和旋转速度 接收正交信号&#…...

力扣44题通配符匹配题解
44. 通配符匹配 - 力扣(LeetCode) 给你一个输入字符串 (s) 和一个字符模式 (p) ,请你实现一个支持 ? 和 * 匹配规则的通配符匹配: ? 可以匹配任何单个字符。* 可以匹配任意字符序列(包括空字符序列)。 …...
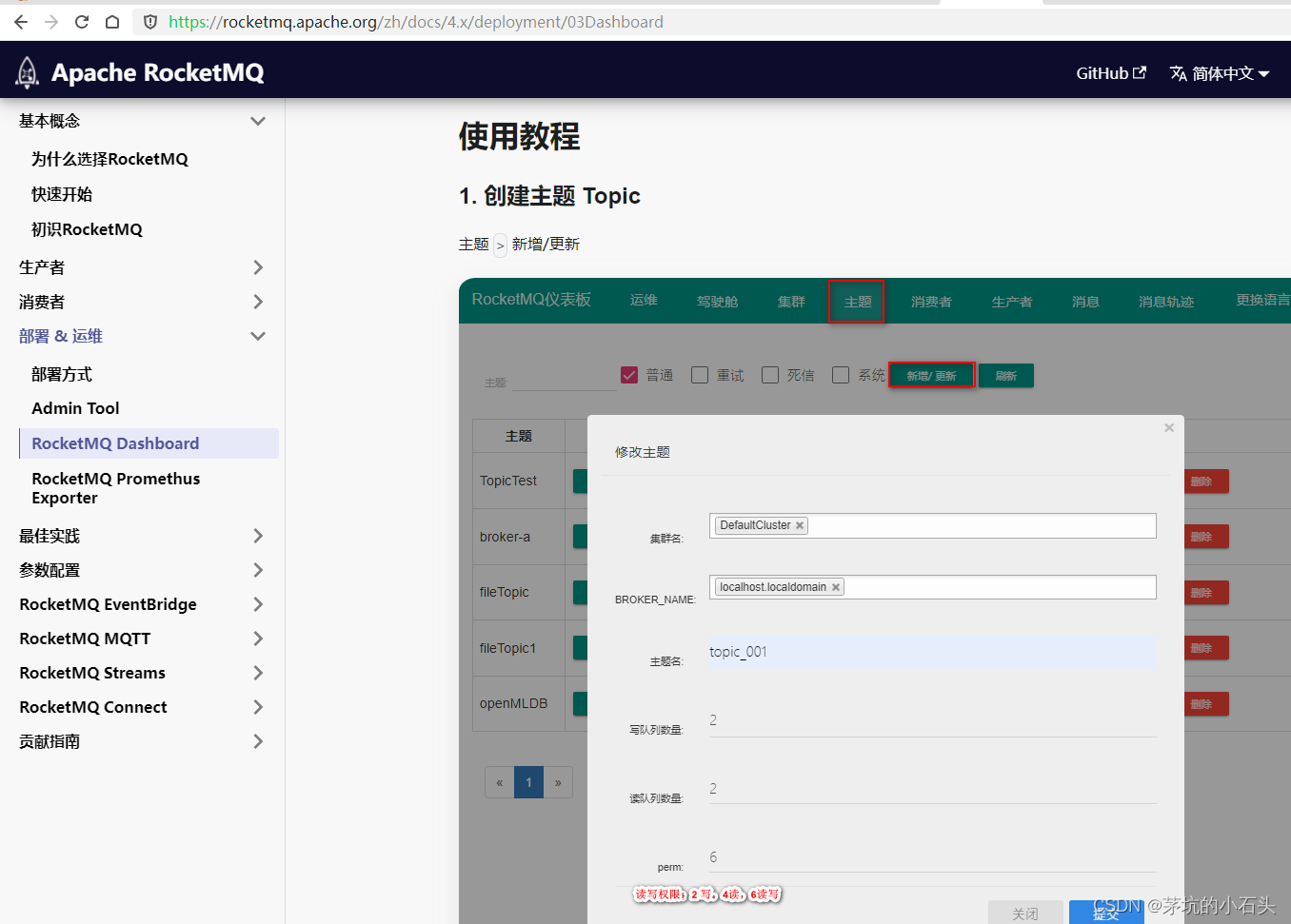
windows系统安装RocketMQ_dashboard
1.下载源码 按照官网说明下载源码 官网 官网文档 2.源码安装 2.1.① 编译rocketmq-dashboard 注释掉报错的maven插件frontend-maven-plugin、maven-antrun-plugin mvn clean package -Dmaven.test.skiptrue2.2.② 运行rocketmq-dashboard java -jar target/rocketmq-…...
ATECLOUD电源自动测试系统打破传统 助力新能源汽车电源测试
随着新能源汽车市场的逐步扩大,技术不断完善提升,新能源汽车测试变得越来越复杂,测试要求也越来越严格。作为新能源汽车的关键部件之一,电源为各个器件和整个电路提供稳定的电源,满足需求,确保新能源汽车的…...

如何教会小白使用淘宝API接口获取商品数据
随着互联网的普及,越来越多的人开始接触网络购物,而淘宝作为中国最大的电商平台之一,成为了众多消费者首选的购物平台。然而,对于一些小白用户来说,如何通过淘宝API接口获取商品数据可能是一个难题。本文将详细介绍如何…...
Redis有序集合对象
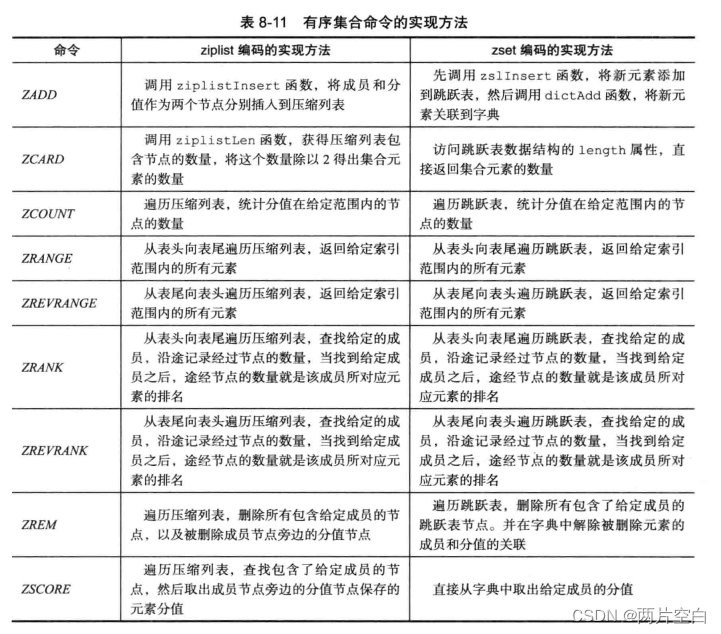
一.编码 有序集合的编码可以是ziplist或者skiplist。 ziplist编码的有序集合对象使用压缩列表作为底层实现,每一个集合元素使用紧挨在一起的两个压缩列表节点来保存。第一个节点保存元素的成员(member),而第二个元素则保存元素的分值(score)。 127.0.0.…...

【C++数据结构 | 字符串速通】10分钟秒杀字符串相关操作 | 字符串的增删改查 | 字符串与数组相互转换
字符串 by.Qin3Yu 文中所有代码默认已使用std命名空间且已导入部分头文件: #include <iostream> #include <string> using namespace std;概念速览 字符串是一种非常好理解的数据类型,它用于存储和操作文本数据。字符串可以包含任意字符…...
运动重定向:C-3PO
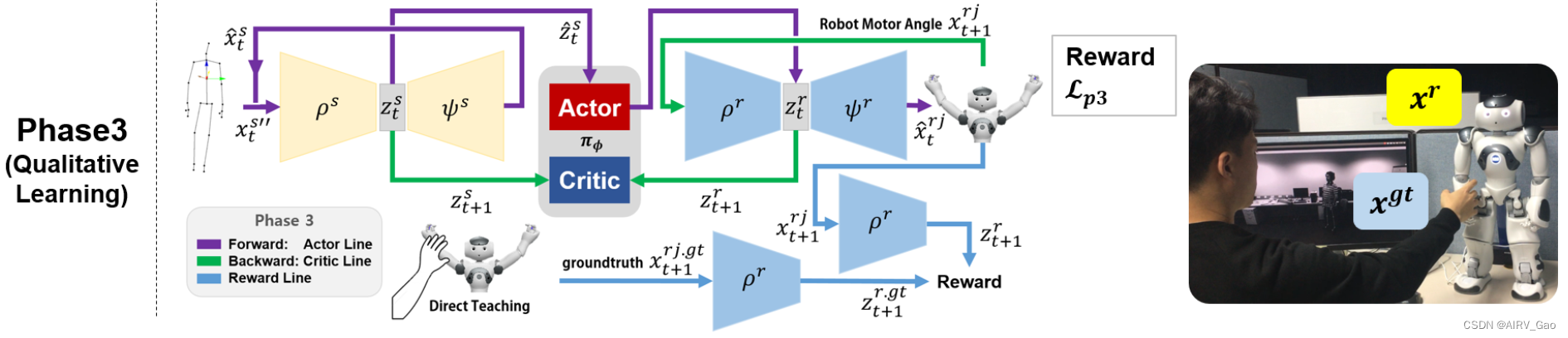
C-3PO: Cyclic-Three-Phase Optimization for Human-Robot Motion Retargeting based on Reinforcement Learning解析 摘要1. 简介2. 相关工作2.1 运动重定向(Motion Retargeting)2.2 强化学习(Reinforcement Learning) 3. 预备知…...
天池SQL训练营(四)-集合运算-表的加减法和join等
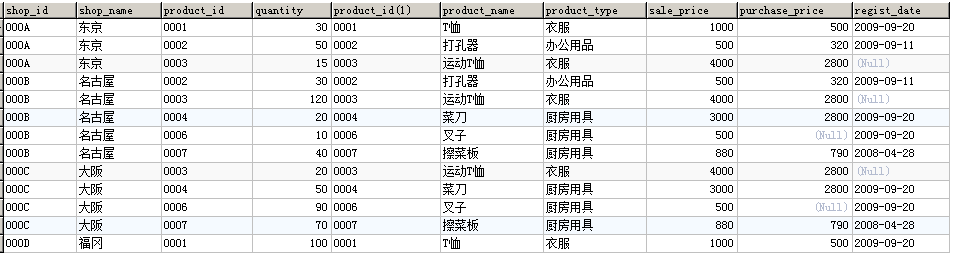
-天池龙珠计划SQL训练营 4.1表的加减法 4.1.1 什么是集合运算 集合在数学领域表示“各种各样的事物的总和”, 在数据库领域表示记录的集合. 具体来说,表、视图和查询的执行结果都是记录的集合, 其中的元素为表或者查询结果中的每一行。 在标准 SQL 中, 分别对检索结果使用 U…...
thinkphp lists todo
来由: 数据库的这个字段我想返回成: 新奇的写法如下: 逻辑层的代码: public function goodsDetail($goodId){$detail $this->good->where(id, $goodId)->hidden([type_params,user_id])->find();if (!$detail) {ret…...
)
【Flutter】创建应用顶级组件,应用根组件 (学习记录)
前言 在 Flutter 中,应用的顶级组件或根组件通常是在 main() 函数中通过 runApp() 方法创建的。这个组件通常是一个 MaterialApp、CupertinoApp、GetMaterialApp 或其他类似的应用框架组件。 以下是一个创建 MaterialApp 作为根组件的示例: void main()…...
AI材料专题报告:AI革命催生新需求国产替代推动新方向
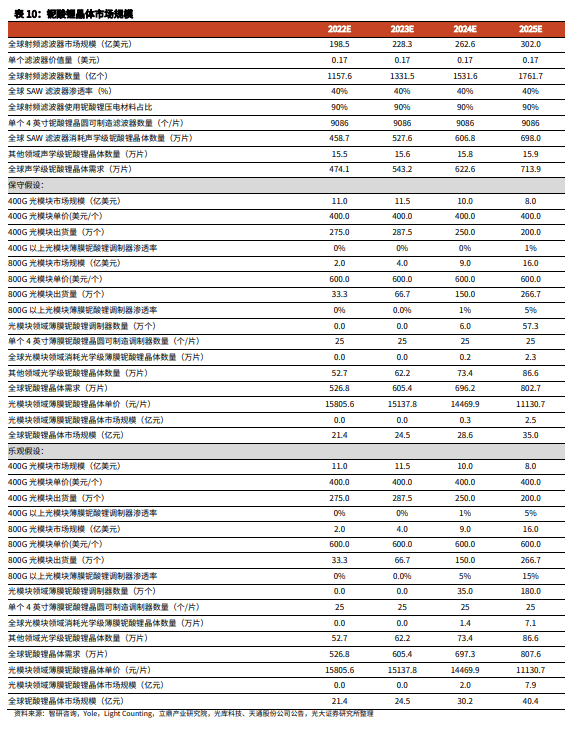
今天分享的AI系列深度研究报告:《AI材料专题报告:AI革命催生新需求国产替代推动新方向》。 (报告出品方:光大证券) 报告共计:25页 1、算力需求增长催生 800G 光模块需求 算力是数字经济时代新生产力&…...

JVM 分析GC日志
GC日志参数 -verbose:gc 输出gc日志信息,默认输出到标准输出 -XX:PrintGC 输出GC日志。类似:-verbose:gc -XX:PrintGCDetails 在发生垃圾回收时打印内存回收详细的日志,并在进程退出时输出当前内存各区域分配情况 -XX:PrintGCTimeStam…...

阿里云服务器环境配置,ssh免密登录和配置docker
此文章适合ubuntu20.04 64位和ubuntu22.04 64位版本 一.登陆服务器 租完服务器后,首选需要使用本地gitbash或者cmd进入服务器, 命令: ssh rootxxx xxx为服务器公网ip,然后yes,然后输入密码就会进入自己的服务器&am…...
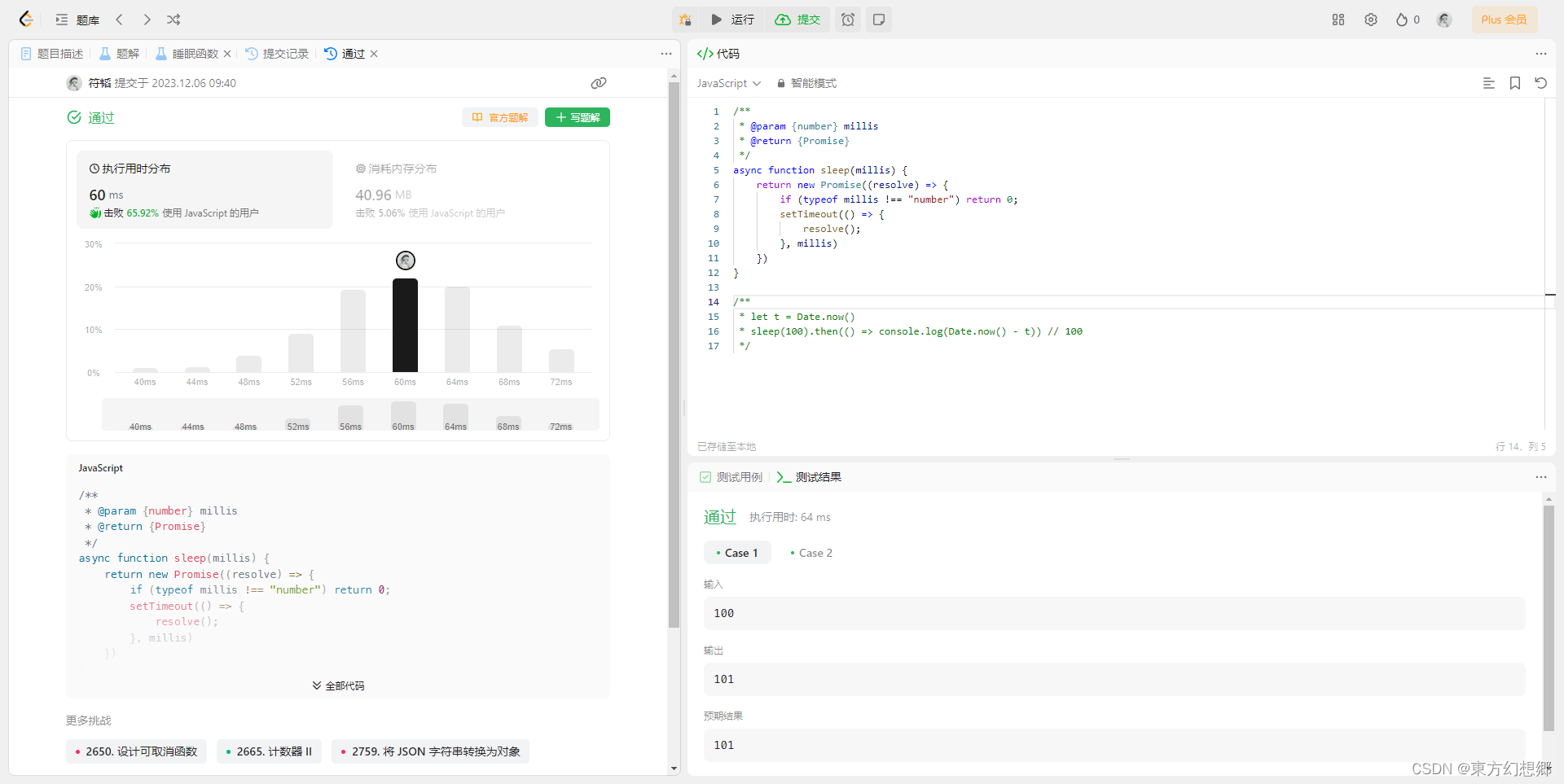
【LeetCode】2621. 睡眠函数
睡眠函数 Promise异步 题目题解 题目 请你编写一个异步函数,它接收一个正整数参数 millis ,并休眠 millis 毫秒。要求此函数可以解析任何值。 示例 1: 输入:millis 100 输出:100 解释: 在 100ms 后此异步…...

网络入门---TCP通信实现
目录标题 前言准备工作 tcpserver.hpp构造函数初始化函数(listen)运行函数(accept) tcpserver.cctcpclient.hpp构造函数初始化函数运行函数(connect) tcpclient.cc问题测试改进一:多进程改进二:多线程改进三:线程池完整代码 前言 在前面的文…...

neuq-acm预备队训练week 8 P2661 [NOIP2015 提高组] 信息传递
题目背景 NOIP2015 Day1T2 题目描述 有 n 个同学(编号为 1 到n)正在玩一个信息传递的游戏。在游戏里每人都有一个固定的信息传递对象,其中,编号为 i 的同学的信息传递对象是编号为 Ti 的同学。 游戏开始时,每人都…...

《C++新经典设计模式》之第18章 备忘录模式
《C新经典设计模式》之第18章 备忘录模式 备忘录模式.cpp 备忘录模式.cpp #include <iostream> #include <vector> #include <memory> using namespace std;// 保存对象内部状态,必要时恢复 // 在不破坏封装性的前提下,捕获对象的内部…...
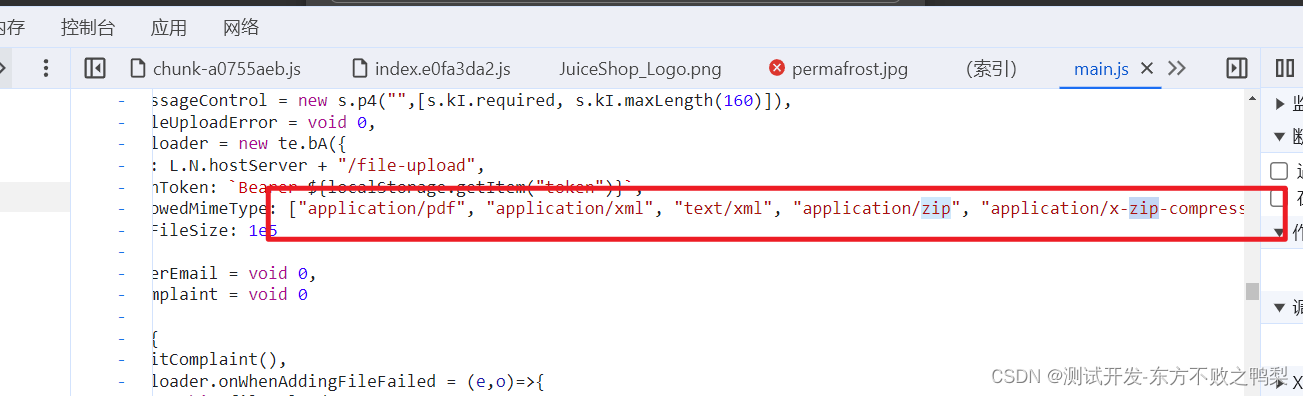
OWASP安全练习靶场juice shop-更新中
Juice Shop是用Node.js,Express和Angular编写的。这是第一个 完全用 JavaScript 编写的应用程序,列在 OWASP VWA 目录中。 该应用程序包含大量不同的黑客挑战 用户应该利用底层的困难 漏洞。黑客攻击进度在记分板上跟踪。 找到这个记分牌实际上是&#…...

当使用RSA加密,从手机前端到服务器后端的请求数据存在+
将转成了空格,导致解密出错 将空格转成了...
》第4.2条直指Agent记忆泄露风险:3类必查缓存节点+2分钟自检脚本)
紧急!财政部新发《AI增强型审计工作指引(试行)》第4.2条直指Agent记忆泄露风险:3类必查缓存节点+2分钟自检脚本
更多请点击: https://kaifayun.com 第一章:AI Agent审计行业应用 AI Agent在审计行业的深度渗透正重塑传统作业范式。不同于规则驱动的RPA工具,AI Agent具备目标分解、工具调用、多步推理与自主反馈能力,可动态适配审计场景中的非…...

85%企业将淘汰纯业务程序员!2026年前,大模型才是你的职业救命稻草!
文章指出传统技术岗面临淘汰风险,85%企业计划在2026年前淘汰纯业务型程序员。未来职场核心竞争力在于掌握大模型技术。文章强调大模型技术是技术人的时代红利,提供从入门到精通的全套视频教程,涵盖提示词工程、RAG、Agent等技术点。文章还分析…...

AI Agent不是工具课,而是组织进化课:全球TOP5咨询公司正在用的7维培训成熟度评估框架
更多请点击: https://intelliparadigm.com 第一章:AI Agent不是工具课,而是组织进化课:全球TOP5咨询公司正在用的7维培训成熟度评估框架 当麦肯锡、BCG、贝恩、罗兰贝格与奥纬在2024年Q2同步升级其内部AI能力发展路线图时&#x…...
)
别再死记公式了!用Multisim仿真带你直观理解星三角变换(Y-Δ)
用Multisim仿真破解星三角变换:从公式恐惧到电路直觉 记得第一次在实验室里面对三相电路板时,那些密密麻麻的接线和闪烁的指示灯让我完全摸不着头脑。教授在黑板上写满Y-Δ变换公式时,我的笔记本上只留下了一堆问号——直到我发现仿真软件这…...

Autodesk Fusion 360 Linux终极指南:在Ubuntu上运行专业3D建模软件
Autodesk Fusion 360 Linux终极指南:在Ubuntu上运行专业3D建模软件 【免费下载链接】Autodesk-Fusion-360-for-Linux This is a project, where I give you a way to use Autodesk Fusion 360 on Linux! 项目地址: https://gitcode.com/gh_mirrors/au/Autodesk-Fu…...

深度学习分段逼近实战:激活函数硬件友好型实现指南
1. 项目概述:为什么“分段逼近”不是数学游戏,而是深度学习落地的命脉“Mastering Deep Learning: The Art of Approximating Non-Linearities with Piecewise Estimations Part-2”——这个标题里藏着一个被太多教程刻意绕开的真相:深度学习…...

【AI Agent审计实战白皮书】:20年审计专家亲授7大高危场景识别法与合规落地路径
更多请点击: https://intelliparadigm.com 第一章:AI Agent审计的核心范式演进 传统软件系统审计聚焦于代码合规性、日志完整性与权限边界,而AI Agent的自主决策、多步推理与动态工具调用能力,正推动审计范式从静态验证转向“意图…...

有哪些AI论文软件是真的适配学科专业,而不是模板套话?
在 AI 写作技术迅猛发展的今天,各类论文工具层出不穷,看似能快速完成写作任务,实则多数是内容空洞、逻辑混乱、格式随意的“模板复制器”,生成的文章缺乏专业深度,充斥着机械化的表达方式。真正具备学术价值的 AI 论文…...

3步高效启用Windows Insider预览计划:免登录离线方案终极指南
3步高效启用Windows Insider预览计划:免登录离线方案终极指南 【免费下载链接】offlineinsiderenroll OfflineInsiderEnroll - A script to enable access to the Windows Insider Program on machines not signed in with Microsoft Account 项目地址: https://g…...

为什么83%的AI Agent项目卡在POC阶段?——20年架构师拆解4层“隐性集成墙”及破壁工具链
更多请点击: https://kaifayun.com 第一章:为什么83%的AI Agent项目卡在POC阶段?——20年架构师拆解4层“隐性集成墙”及破壁工具链 当AI Agent从论文走向产线,真正的断崖不在模型能力,而在四堵看不见的“集成墙”&am…...