工业机器人编程调试怎么学
很多人觉得工业机器人很难学学,实际上机器人涉及的知识远比PLC要少。现简单说明一下初学者学习工业机器人编程调试的流程,以AUBO机器人为例:
首先我们需要知道工业机器人的调试学起来不难,远比编程更简单,示教器上的编程远比脚本代码编程要简单。系统学习工业机器人的几个阶段:
1、了解工业机器人和安装对应软件
了解工业机器人的结构、分类和应用场景。然后构建基础练习用的工业机器人虚拟工作站,以便于后面的编程练习和仿真。
(1)熟悉硬件:本体+控制柜,上电/断电、开机/关机。注意:上电不等于开机。
(2)通读用户手册。
(3)机器人官网浏览学习,掌握常见概念。
2、工业机器人硬件结构及接线
掌握工业机器人标准配置,也就是工业机器人由哪几个部分构成。以AUBO-I5工业机器人为例,包括4个主要部分:工业机器人本体、示教器、线缆配件及控制柜。

其中控制柜是工业机器人的控制主体,机器人本体为机器人系统的执行部分,示教器给用户提供了一个可视化的操作界面,这三者之间则用线缆配件连接起来。
3、工业机器人示教器基本操作及工件/用户坐标系标定
了解了机器人的构造和安装之后,我们要学会该怎么操作示教器让机械臂动起来。在这一阶段,需要掌握工业机器人示教器的构成和基础操作,熟悉示教器主界面,包括:
(1)位姿=位置+姿态、6关节电机角度。
(2)能够使用示教器上的步进模式进行示教位置微调。
(3)用户坐标系,必须会创建用户坐标系。
(4)工具坐标系的创建,这个是可选操作。
(5)要注意看清楚机械臂基坐标系XYZ方向,否则在示教器上往XYZ轴方向移动时会弄错方向,尤其是XYZ轴都有正反两个方向。
(6)在示教器中切换用户坐标系,要明白为什么要切换用户坐标系,何时切换用户坐标系。
(7)要明白不管用什么用户坐标系,还是就用机械臂基坐标系,最终得到的路点永远都是机械臂6个关节的电机角度,这是本质。
(8)要明白示教器左下角切换工具坐标系导致XYZ RX RY RZ数值的变化是为什么,如果不理解就会导致不知道什么时候去切换工具坐标系。

关于接线,要能看懂控制柜IO板上的各种符号,控制柜上的用户IO接线,理解npn和pnp的电压高低和电流流向,以及急停、防护停止、拖动示教,以及气缸的接线等等。
4、工业机器人编程调试及仿真
手动控制学会了之后,我们就要开始学习该怎么编程,让机械臂按照我们编写的程序自动工作。在这个阶段我们需要学习机器人基本指令和功能函数,这一阶段内容相对前面几个阶段难度稍高一些,但是结合实际操作之后也很容易就能掌握了。这个阶段最好有实物操作练习,如果没有也可以用各家机械臂自带的模拟软件仿真练习。
基础要求:
(1)能够用逻辑树可视化界面编写简单的控制逻辑,简单逻辑使用基本指令。
(2)可配置的变量类型有哪几种?尤其是要熟悉pose类型的变量表示什么含义。
(3)熟悉最基本最常用的指令,包括:move、set、wait、if、elseif、else、loop,以及waypoint、while、for等基本指令。
(4)知道关节轴动、直线运动、圆弧/圆周运动的区别,使用它们时传递的参数的含义,这些手册上都有讲解。
(5)知道怎么调整机械臂运动的速度。
如果以上都掌握了,可以进一步学习脚本代码编程了。不过这个难度稍高,暂不做说明。
5、机械臂IO配置
掌握机床IO信号的配置需要能熟练说出有哪些IO信号,并且能够把机床IO信号和IO扩展板的信号线连接正确。
一个完整的机器人工作站,除了机械臂本体之外,还会有其他的一些设备来和机械臂协同工作,比如外接一个启动按钮,一个停止按钮,一个双色灯。要求按下启动按钮,机械臂开始工作,并亮绿灯;按下停止按钮,机械臂停止工作并亮红灯。那这些按钮功能的实现就需要我们事先配置好IO点位,做好信号的交互。所以这个阶段我们就需要好好学习一下机械臂IO信号的类别和配置。
6、工业机器人实战练习
前面关于机械臂的基础知识全部学完了之后,就是需要大量的实战练习,来对前面学习的内容进行消化和融汇贯通。如果公司里有机械臂相关的项目,那就可以跟着好好学习和练习,尤其是调试,亲自上手一次等于看一百遍。有时间也可以多看一看其他工程师写的程序。想更进一步需要多关注通讯方面的知识比如modbus。
虽然使用的软件不同,如果掌握了本质不同品牌的机器人不管是调试还是编程差异都没有那么大,佳途自动化网站上也有ABB机器人打磨和码垛的课程可供学习参考。

相关文章:
工业机器人编程调试怎么学
很多人觉得工业机器人很难学学,实际上机器人涉及的知识远比PLC要少。现简单说明一下初学者学习工业机器人编程调试的流程,以AUBO机器人为例: 首先我们需要知道工业机器人的调试学起来不难,远比编程更简单,示教器上的编…...

Java并发包提供了哪些并发工具类?
第19讲 | Java并发包提供了哪些并发工具类? 通过前面的学习,我们一起回顾了线程、锁等各种并发编程的基本元素,也逐步涉及了 Java 并发包中的部分内容,相信经过前面的热身,我们能够更快地理解 Java 并发包。 今天我要…...
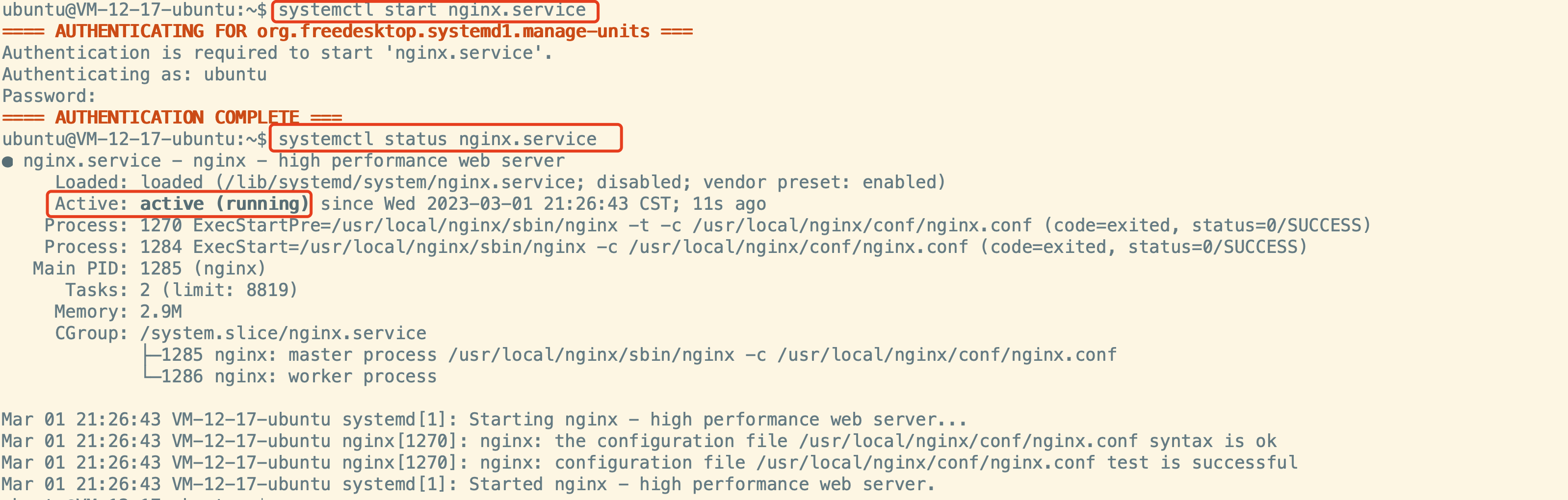
systemctl 启动/停止/重新加载 nginx
systemctl 启动/停止/重新加载 nginx 一、新建nginx.service脚本 sudo vim /usr/lib/systemd/system/nginx.service然后按iii进入编辑模式,粘贴如下内容,其中/usr/local/nginx/是进行make && make install之后的文件夹路径,需要根据…...
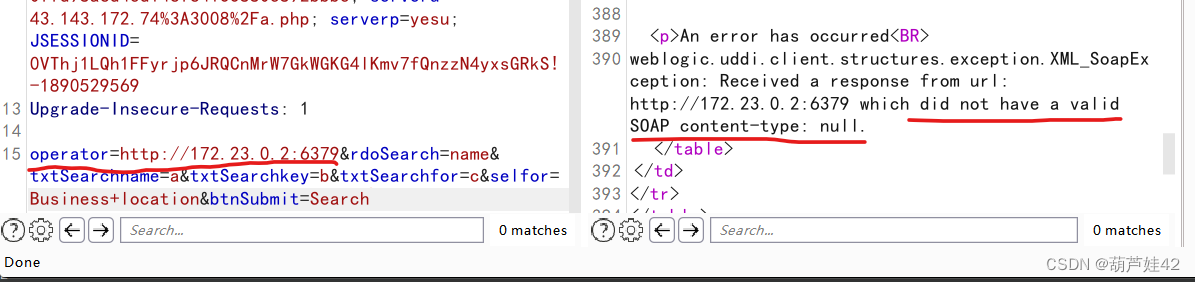
SSRF学习 3
目录 <1> 什么是SSRF? <2> 通常SSRF会发生在哪些位置? <3> 测试流程 <4> Weblogic-ssrf 复现 (1) 漏洞存在点 (2) 注入HTTP头,利用Redis反弹shell (3) 修复方案 <1> 什么是SSRF? SSRF(Serv…...
)
Mysql(数据库基础篇)
👌 棒棒有言:也许我一直照着别人的方向飞,可是这次,我想要用我的方式飞翔一次!人生,既要淡,又要有味。凡事不必太在意,一切随缘,缘深多聚聚,缘浅随它去。凡事…...
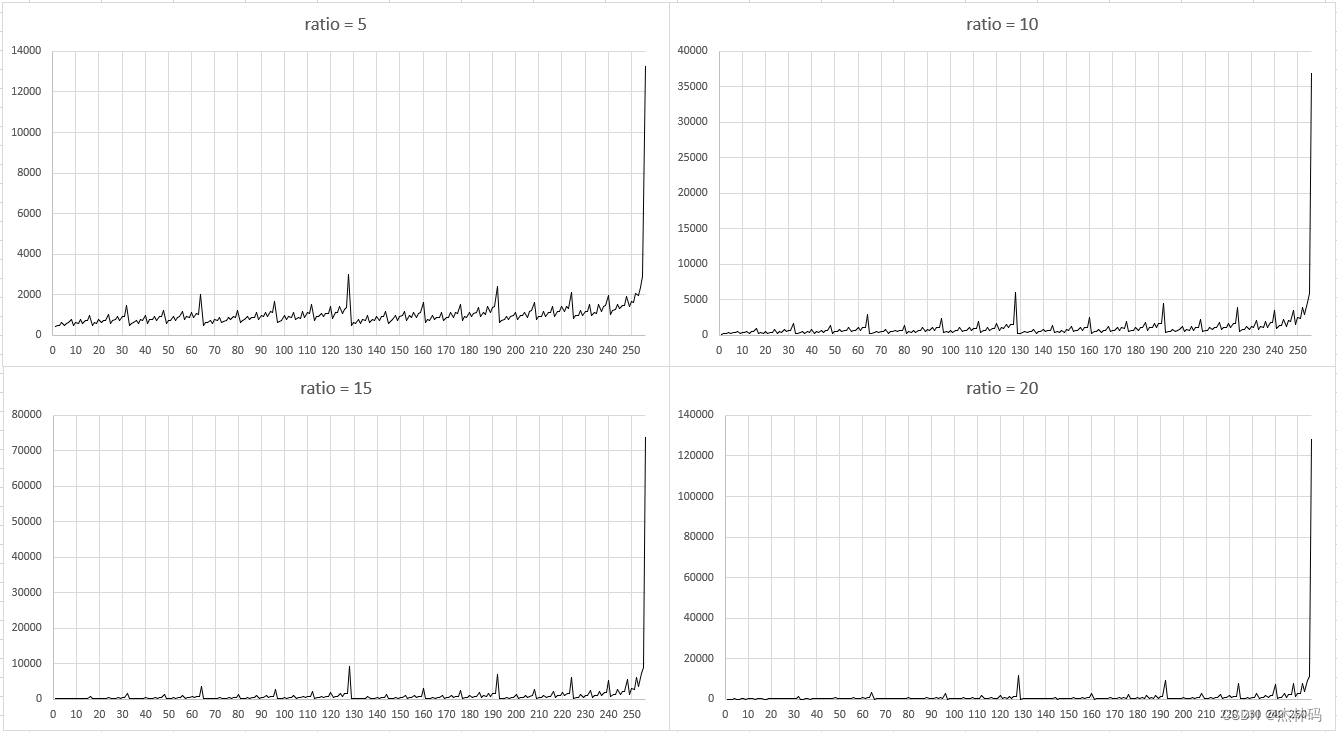
一种全新的图像变换理论的实验(五)——研究目的替代DCT和小波
一、前言 目前在大量的灰度图像测试下,基本确定变换系数ratio取值0-25之间时,逆变化后的图还能基本保障效果,而且越接近0效果越好。本文还是以lenna.bmp灰度图为例,实验不再逆变换,而是把变换后的数据直接输出为bmp的…...
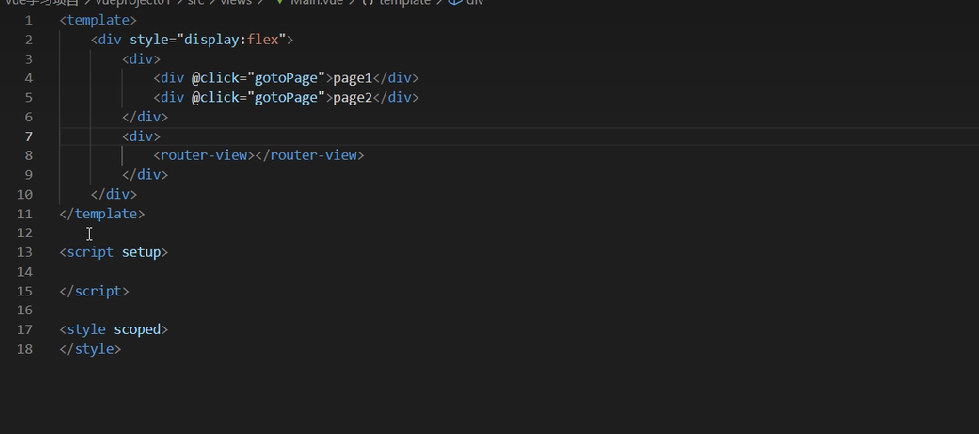
vue3、vite、pinia 快速入门
准备 开发工具及插件IDE:vscode,WebStorm插件:Auto Close Tag、Auto Rename Tag、Live Server通过“!”快速生成html模板正式学习安装vue通过CDN的方式导入vue<script src"" target"_blank">https://unpkg.com/vue3/dist/vue.…...
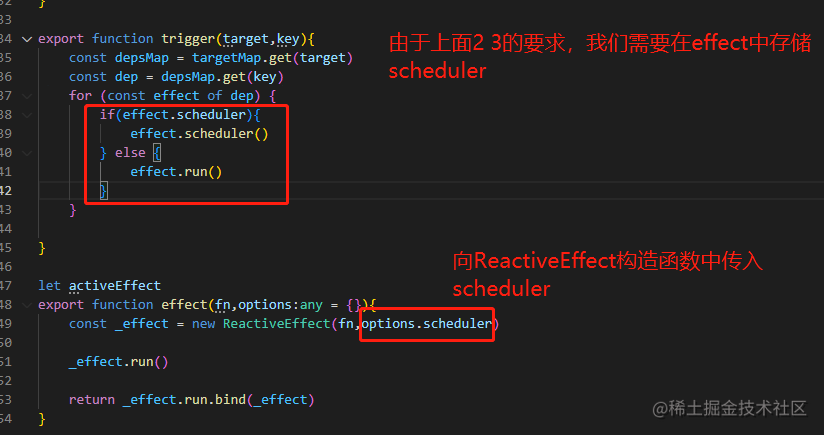
第六章 effect.scheduler功能实现
effect.scheduler功能实现 主要先了解scheduler需要实现什么样的需求,有一下四点: 1 通过 effect 的第二个参数给定一个 scheduler 的 fn 2 effect 第一次执行的时候 还会执行 fn 3 当 响应式对象 set update 不执行fn 而是执行 scheduler 4 如果说…...

软件测试之zentao
禅道 1. 禅道介绍 1.1 禅道项目管理软件是做什么的? 禅道,国产开源项目管理软件。它集产品管理、项目管理、质量管理、文档管理、组织管理和事务管理于一体,是一款专业的研发项目管理软件,完整覆盖了研发项目管理的核心流程。禅…...

美颜sdk动态贴纸的实现流程
随着移动互联网时代的到来,各式各样的 APP层出不穷,从最初的微信、 QQ到如今的抖音、快手等等,再到如今的微博、小红书等等,各式各样的 APP不断涌现。从最开始简单的图片展示到视频聊天,再到现如今丰富多样的各种动态贴…...

Web连接器
分模块编写爬虫(一) 连接器模块基本思路: 输入:url连接输出:url对应的html文本步骤: 定义url和user-agent获取网页的requests对象捕获异常: 403:禁止访问404:页面失效5…...
插上数据的翅膀,开启我升职加薪的梦想之旅
我是麦思思,大学毕业后就进入大厂工作并担任电子消费行业业务部门的数据分析师,对于一个数据分析师而言,Excel是必备技能,函数公式我能随手就来,几十M的文件处理那都是轻轻松松。但是,近几年随着企业业务发…...

来香港饮茶吹水先,免费报名Zabbix Meetup香港站!
Zabbix Meetup 来到香港啦! 春暖花开,Zabbix计划5月来到香港,和你一起饮茶吹水! 时间:5月某日,周几方便? 预计14:00-17:00 形式:线下交流会,免费,线下&…...

李群李代数求导-常用求导公式
参考 A micro Lie theory for state estimation in robotics manif issues 116 常用求导公式 Operation左雅克比右雅克比X−1\mathcal{X}^{-1}X−1JXX−1−I\mathbf{J}_{\mathcal{X}}^{\mathcal{X}^{-1}}\mathbf{-I}JXX−1−IJXX−1−AdX\mathbf{J}_{\mathcal{X}}^{\mathc…...
IIS之web服务器的安装、部署以及使用教程(图文详细版)
WEB服务器的部署 打开虚拟机后查看已经开放的端口,可以看到没有TCP 80、TCP 443,说明HTTP服务端口没有打开 打开我的电脑—双击CD驱动器 选择安装可选的Windows组件 选择应用程序服务器—打开Internet信息服务—选择万维网服务和FTP服务 一路确…...

进程的介绍
文章目录一.进程的概念1.1概念1.2进程的组成1.2.1 PCB中描述进程的特征二.进程的虚拟地址空间三.进程间的通信引入线程一.进程的概念 1.1概念 百科的介绍: 换句话说,一个跑起来的程序,就是一个进程,也就是在操作系统中运行的exe程序就是一个进程,如下图的进程列表 进程是操…...

hadoop shell 练习题
hadoop shell 练习题: 利用Hadoop提供的Shell命令完成以下任务(路径中的xxx替换为自己的用户名): 1、显示HDFS中指定的文件的读写权限、大小、创建时间、路径等信息; 示例: hdfs dfs -ls / 2、从HDFS中下载指定文件; 示例: hdfs dfs -get /…...

优化Linux系统性能的必杀技:调整进程优先级!学会使用nice命令,让你的系统飞一般的顺畅!
文章目录前言一. nice命令介绍1.1 nice的介绍1.2 cpu资源的调度1.3 nice是控制内核吗?二. 语法格式及常用选项三. 参考案例3.1 将ls命令的优先级调整为最高3.2 将 find 命令的优先级调整为最低3.3 如何查看nice值四. nice和renice的区别总结前言 大家好,…...
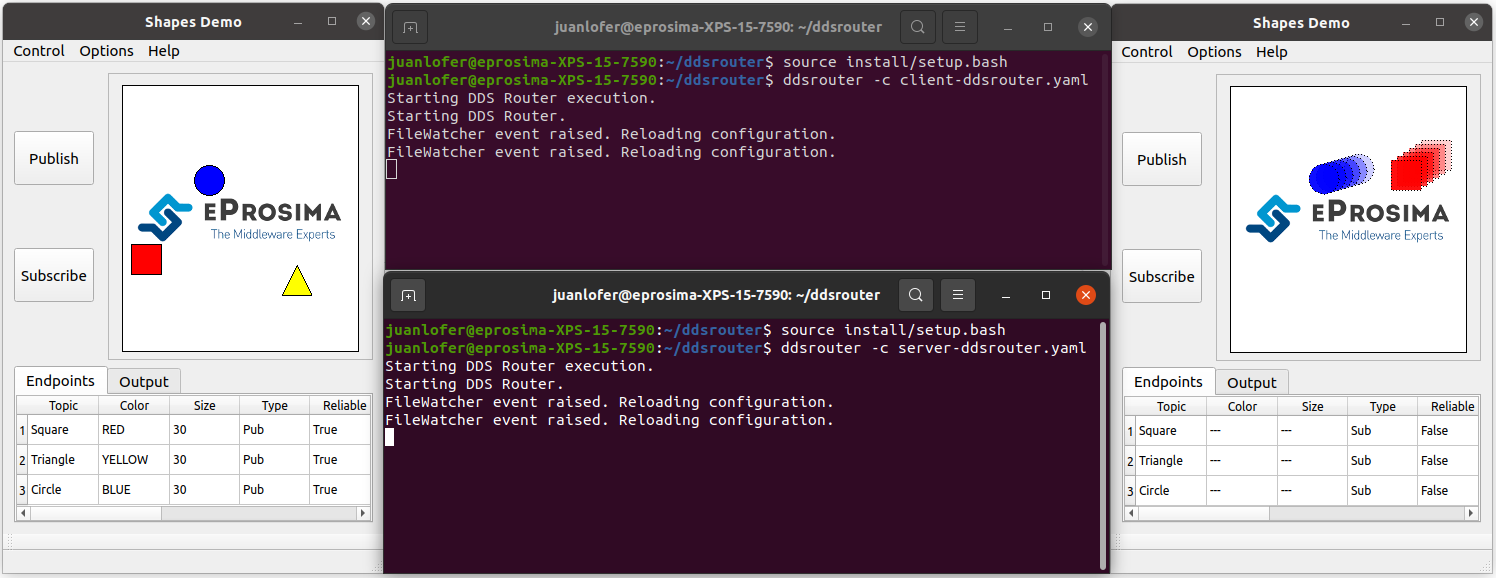
fastdds router-3.开始
1. 项目概述 DDS路由器是由eProsima开发的跨平台非图形化应用程序,由Fast DDS提供支持,允许创建一个通信桥,连接两个DDS网络,否则将被隔离。DDS路由器的主要用途是通信两个物理或虚拟分离的DDS网络,这些网络属于不同的…...

云服务器ECS 什么是云服务器ECS?
云服务器ECS(Elastic Compute Service)是阿里云提供的性能卓越、稳定可靠、弹性扩展的IaaS(Infrastructure as a Service)级别云计算服务。 云服务器ECS免去了您采购IT硬件的前期准备,让您像使用水、电、天然气等公共…...

在ubuntu上使用nodejs通过taotoken统一调用多模型api
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在 Ubuntu 上使用 Node.js 通过 Taotoken 统一调用多模型 API 基础教程类,指导 Ubuntu 上的 Node.js 开发者如何利用 T…...

基于VitePress构建开源AI智能体框架深度中文文档站实战指南
1. 项目概述:一个为AI智能体框架量身打造的中文文档站如果你正在寻找一个能帮你把Claude、GPT这些大模型快速接入到微信、Telegram、飞书等聊天软件的开源框架,那你大概率会接触到OpenClaw(原名ClawdBot)。但当你兴冲冲地打开官方…...

TEdit地图编辑器:从新手到专家的泰拉瑞亚世界创作指南
TEdit地图编辑器:从新手到专家的泰拉瑞亚世界创作指南 【免费下载链接】Terraria-Map-Editor TEdit - Terraria Map Editor - TEdit is a stand alone, open source map editor for Terraria. It lets you edit maps just like (almost) paint! It also lets you ch…...

为什么Windows用户需要APK安装器?三大场景解决你的跨平台痛点
为什么Windows用户需要APK安装器?三大场景解决你的跨平台痛点 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 你是否曾经遇到过这样的困境:在电…...

终极指南:在Windows上无需模拟器安装安卓应用的完整教程
终极指南:在Windows上无需模拟器安装安卓应用的完整教程 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 还在为安卓模拟器的臃肿和卡顿烦恼吗?今…...

芯片设计演进:从摩尔定律到软件驱动与异构集成的工程实践
1. 项目概述:一位芯片老兵的CMOS缩放宣言在半导体这个日新月异的行业里,每隔几年就会听到“摩尔定律已死”的论调。这几乎成了一个周期性出现的“行业寓言”。但如果你在2014年,有机会和吉姆凯勒(Jim Keller)——这位先…...
)
从pip._vendor.urllib3报错到apt-get失败:一次搞定Ubuntu网络DNS配置(附阿里云镜像加速)
从pip报错到apt-get失败:Ubuntu网络DNS配置全攻略 最近在Ubuntu 16.04上配置Python开发环境时,遇到了一个看似简单却令人头疼的问题——pip安装包时频繁报错pip._vendor.urllib3.connection.HTTPSConnection,紧接着发现连apt-get update也失败…...

CV论文工业落地避坑指南:从复现到部署的四大过滤维度
1. 这不是论文清单,而是一份“CV研究者晨间速读指南” 如果你每天打开arXiv、CVPR官网或Twitter刷到一堆标题带“Vision Transformer”“Diffusion”“Multimodal Alignment”的新论文,却总在摘要第一句就卡住——“We propose a novel hierarchical tok…...

FPGA生成SPWM的另一种思路:抛弃ROM,用DDS IP核与CORDIC算法实时生成正弦波
FPGA实时生成SPWM:基于DDS IP核与CORDIC算法的高效实现方案 在电力电子和电机控制领域,SPWM(正弦脉宽调制)技术因其优异的谐波特性和高效率而广受青睐。传统FPGA实现方案通常采用预存波形数据的ROM方法,虽然实现简单&a…...

3分钟解决Windows 11 LTSC应用生态缺失:微软商店一键恢复终极指南
3分钟解决Windows 11 LTSC应用生态缺失:微软商店一键恢复终极指南 【免费下载链接】LTSC-Add-MicrosoftStore Add Windows Store to Windows 11 24H2 LTSC 项目地址: https://gitcode.com/gh_mirrors/ltscad/LTSC-Add-MicrosoftStore 你是否正在使用Windows …...