IIC总线式驱动开发(mpu6050)(二)
目录
六、I2C总线二级外设驱动开发方法
七、I2C总线二级外设驱动开发之名称匹配
1. i2c_register_board_info
2. i2c_new_device:明确二级外设地址的情况下可用
3. i2c_new_probed_device
八、I2C总线二级外设驱动开发之设备树匹配
六、I2C总线二级外设驱动开发方法
1. 查阅原理图以便得知二级外设挂在哪条I2C总线上、二级外设的身份标识(二级外设自身的地址)
2. 参照platform样式搭建二级外设驱动框架
3. 查询二级外设芯片手册以便得知驱动需要用到的寄存器地址
注意:
(1) 此处寄存器是指二级外设内部的寄存器,每个寄存器在芯片手册里有个对应编号(也被称为地址),但不是内存地址,特别提醒此寄存器不是SOC芯片内部参与内存统一编址的寄存器,更不是ARM核-CPU的寄存器
(2)通过调用i2c_tranfer函数完成与相应寄存器的数据交互
4. 参照字符驱动完成其余代码编写
5. 创建对应的i2c_client对象
linux-3.14\Documentation\i2c\instantiating-devices
匹配方式:
1. 名称匹配(id和name差不多)
2. 设备树匹配
3. ACPI匹配
Advanced Configuration and Power Management Interface 高级配置和电源管理接口
PC机平台采用的一种硬件配置接口
(咱们是arm平台这种方式用不了)
i2c二级外设驱动框架:
```c//其它struct file_operations函数实现原理同硬编驱动static int mpu6050_probe(struct i2c_client *pclt,const struct i2c_device_id *pid){//做硬编驱动模块入口函数的活}static int mpu6050_remove(struct i2c_client *pclt){//做硬编驱动模块出口函数的活}/*名称匹配时定义struct i2c_device_id数组*/static struct i2c_device_id mpu6050_ids ={{"mpu6050",0},//.....{}};/*设备树匹配时定义struct of_device_id数组*/static struct of_device_id mpu6050_dts ={{.compatible = "invensense,mpu6050"},//....{}};/*通过定义struct i2c_driver类型的全局变量来创建i2c_driver对象,同时对其主要成员进行初始化*/struct i2c_driver mpu6050_driver ={.driver = {.name = "mpu6050",.owner = THIS_MODULE,.of_match_table = mpu6050_dts,},.probe = mpu6050_probe,.remove = mpu6050_remove,.id_table = mpu6050_ids,};/*以下其实是个宏,展开后相当于实现了模块入口函数和模块出口函数*/module_i2c_driver(mpu6050_driver);MODULE_LICENSE("GPL");```
七、I2C总线二级外设驱动开发之名称匹配
这种匹配方式需要自己创建i2c_client对象
创建i2c_client对象有三种方式:
1. i2c_register_board_info
1.当开发板上电内核跑起来的时候,肯定是架构相关的程序首先运行,也就是mach-xxx.c
2. mach-xxx.c文件里首先会定义i2c_board_info的结构体数组,在mach-xxx.c的初始化函数里调用i2c_register_board_info函数把i2c_board_inifo链接进内核的i2c_board_list链表当中去
3.在驱动i2c目录下和开发板板对应的驱动文件i2c-xxx.c里,创建i2c_adapter对象
4.这种方式严重依赖平台,缺乏灵活性,基本会被遗弃
2. i2c_new_device:明确二级外设地址的情况下可用
i2c二级外设client框架:
```c#include <linux/kernel.h>#include <linux/module.h>#include <linux/i2c.h>static struct i2c_board_info mpu6050_info ={I2C_BOARD_INFO("mpu6050",二级外设地址) };static struct i2c_client *mpu6050_client;static int __init mpu6050_dev_init(void){struct i2c_adapter *padp = NULL;padp = i2c_get_adapter(i2c通道编号);mpu6050_client = i2c_new_device(padp,&mpu6050_info);i2c_put_adapter(padp);return 0;}module_init(mpu6050_dev_init);static void __exit mpu6050_dev_exit(void){i2c_unregister_device(mpu6050_client);}module_exit(mpu6050_dev_exit);MODULE_LICENSE("GPL");```
3. i2c_new_probed_device
i2c二级外设client框架:不明确二级外设地址,但是知道是可能几个值之一的情况下可用
```c#include <linux/kernel.h>#include <linux/module.h>#include <linux/i2c.h>static const unsigned short addr_list[] ={0x68,//.....I2C_CLIENT_END};static struct i2c_client *mpu6050_client;static int __init mpu6050_dev_init(void){struct i2c_adapter *padp = NULL;struct i2c_board_info mpu6050_info = {""};strcpy(mpu6050_info.type,"mpu6050");padp = i2c_get_adapter(i2c通道编号);mpu6050_client = i2c_new_probed_device(padp,&mpu6050_info,addr_list,NULL);i2c_put_adapter(padp);if(mpu6050_client != NULL){return 0;}else{return -ENODEV;}}module_init(mpu6050_dev_init);static void __exit mpu6050_dev_exit(void){i2c_unregister_device(mpu6050_client);}module_exit(mpu6050_dev_exit);MODULE_LICENSE("GPL");```
 mpu6050_client.c
mpu6050_client.c
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/i2c.h>static struct i2c_board_info mpu6050_info =
{I2C_BOARD_INFO("mpu6050",0x68)
};static struct i2c_client *gpmpu6050_client = NULL;static int __init mpu6050_client_init(void)
{struct i2c_adapter *padp = NULL;padp = i2c_get_adapter(5);gpmpu6050_client = i2c_new_device(padp,&mpu6050_info);i2c_put_adapter(padp);return 0;
}static void mpu6050_client_exit(void)
{i2c_unregister_device(gpmpu6050_client);
}module_init(mpu6050_client_init);
module_exit(mpu6050_client_exit);
MODULE_LICENSE("GPL");
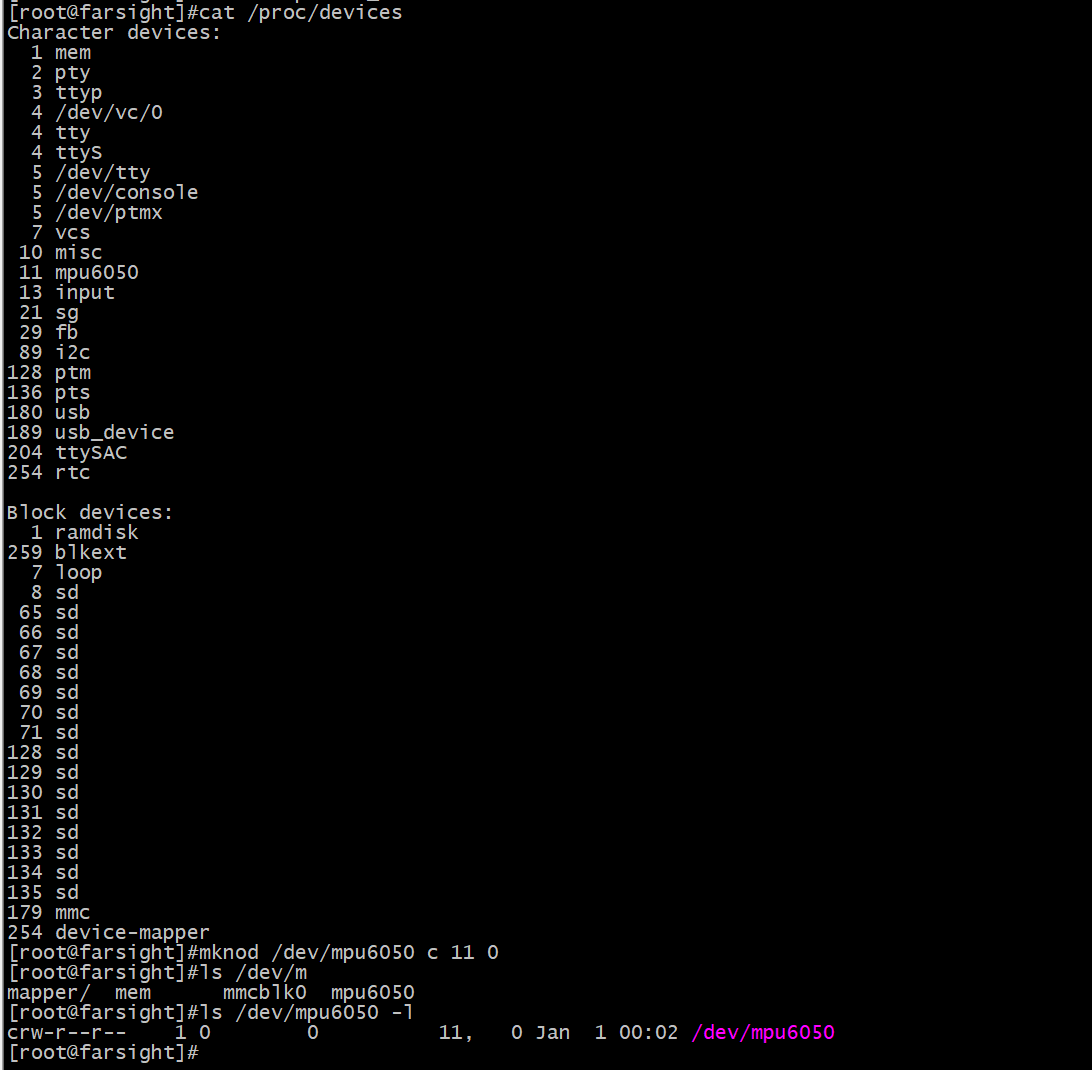
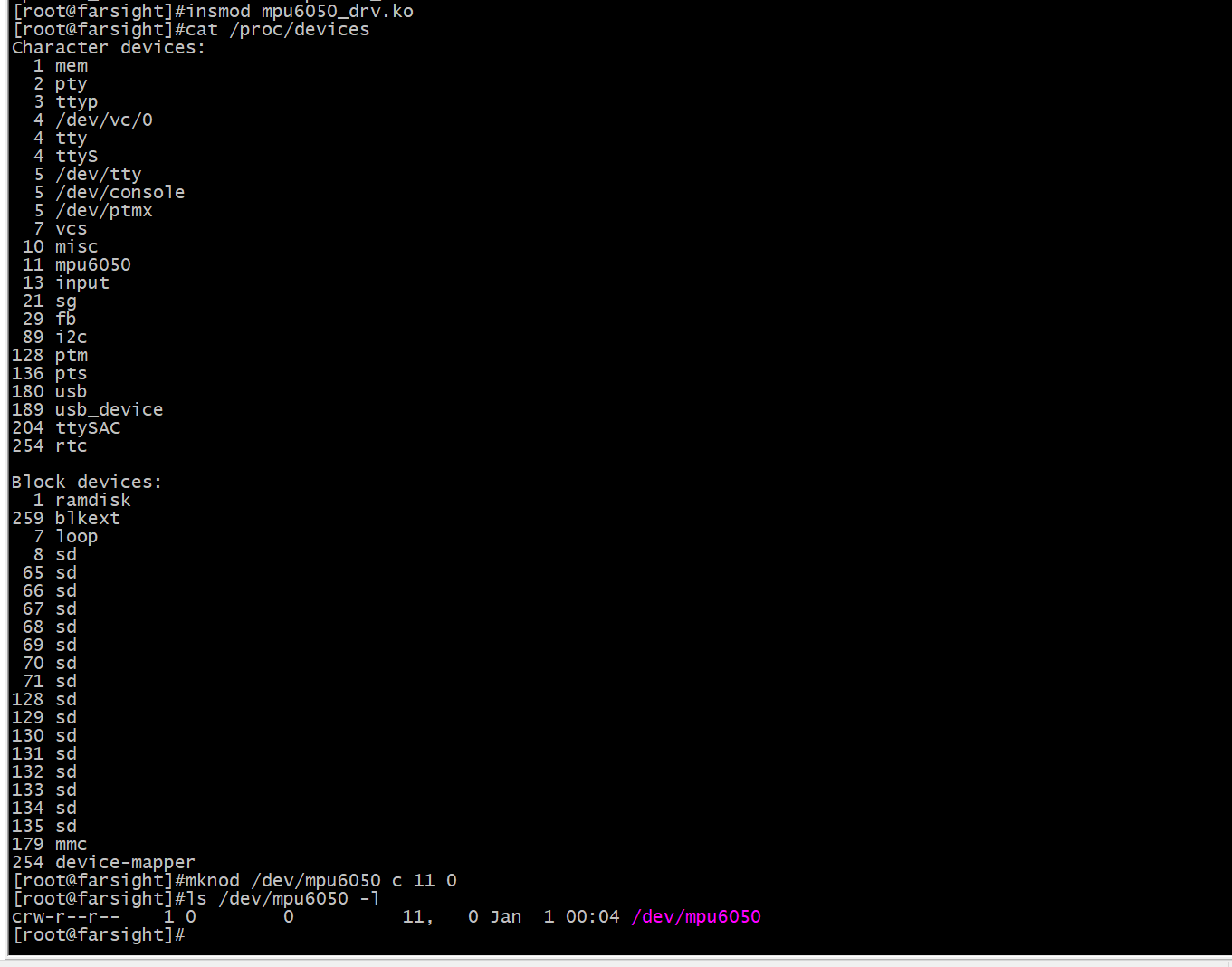
mpu6050_drv.c
#include <linux/module.h> #include <linux/kernel.h> #include <linux/fs.h> #include <linux/i2c.h> #include <linux/cdev.h> #include <linux/wait.h> #include <linux/sched.h> #include <linux/poll.h> #include <linux/slab.h> #include <linux/mm.h> #include <linux/io.h> #include <asm/uaccess.h> #include <asm/atomic.h>#include "mpu6050.h"#define SMPLRT_DIV 0x19 #define CONFIG 0x1A #define GYRO_CONFIG 0x1B #define ACCEL_CONFIG 0x1C#define ACCEL_XOUT_H 0x3B #define ACCEL_XOUT_L 0x3C #define ACCEL_YOUT_H 0x3D #define ACCEL_YOUT_L 0x3E #define ACCEL_ZOUT_H 0x3F #define ACCEL_ZOUT_L 0x40 #define TEMP_OUT_H 0x41 #define TEMP_OUT_L 0x42 #define GYRO_XOUT_H 0x43 #define GYRO_XOUT_L 0x44 #define GYRO_YOUT_H 0x45 #define GYRO_YOUT_L 0x46 #define GYRO_ZOUT_H 0x47 #define GYRO_ZOUT_L 0x48#define PWR_MGMT_1 0x6Bint major = 11; int minor = 0; int mpu6050_num = 1;struct mpu6050_dev {struct cdev mydev;struct i2c_client *pclt;};struct mpu6050_dev *pgmydev = NULL;int mpu6050_read_byte(struct i2c_client *pclt,unsigned char reg) {int ret = 0;char txbuf[1] = {reg};char rxbuf[1] = {0};struct i2c_msg msg[2] = {{pclt->addr,0,1,txbuf},{pclt->addr,I2C_M_RD,1,rxbuf}};ret = i2c_transfer(pclt->adapter,msg,ARRAY_SIZE(msg));if(ret < 0){printk("ret = %d,in mpu6050_read_byte\n",ret);return ret;}return rxbuf[0]; }int mpu6050_write_byte(struct i2c_client *pclt,unsigned char reg,unsigned char val) {int ret = 0;char txbuf[2] = {reg,val};struct i2c_msg msg[1] = {{pclt->addr,0,2,txbuf},};ret = i2c_transfer(pclt->adapter,msg,ARRAY_SIZE(msg));if(ret < 0){printk("ret = %d,in mpu6050_write_byte\n",ret);return ret;}return 0; }int mpu6050_open(struct inode *pnode,struct file *pfile) {pfile->private_data =(void *) (container_of(pnode->i_cdev,struct mpu6050_dev,mydev));return 0; }int mpu6050_close(struct inode *pnode,struct file *pfile) {return 0; }long mpu6050_ioctl(struct file *pfile,unsigned int cmd,unsigned long arg) {struct mpu6050_dev *pmydev = (struct mpu6050_dev *)pfile->private_data;union mpu6050_data data;switch(cmd){case GET_ACCEL:data.accel.x = mpu6050_read_byte(pmydev->pclt,ACCEL_XOUT_L);data.accel.x |= mpu6050_read_byte(pmydev->pclt,ACCEL_XOUT_H) << 8;data.accel.y = mpu6050_read_byte(pmydev->pclt,ACCEL_YOUT_L);data.accel.y |= mpu6050_read_byte(pmydev->pclt,ACCEL_YOUT_H) << 8;data.accel.z = mpu6050_read_byte(pmydev->pclt,ACCEL_ZOUT_L);data.accel.z |= mpu6050_read_byte(pmydev->pclt,ACCEL_ZOUT_H) << 8;break;case GET_GYRO:data.gyro.x = mpu6050_read_byte(pmydev->pclt,GYRO_XOUT_L);data.gyro.x |= mpu6050_read_byte(pmydev->pclt,GYRO_XOUT_H) << 8;data.gyro.y = mpu6050_read_byte(pmydev->pclt,GYRO_YOUT_L);data.gyro.y |= mpu6050_read_byte(pmydev->pclt,GYRO_YOUT_H) << 8;data.gyro.z = mpu6050_read_byte(pmydev->pclt,GYRO_ZOUT_L);data.gyro.z |= mpu6050_read_byte(pmydev->pclt,GYRO_ZOUT_H) << 8;break;case GET_TEMP:data.temp = mpu6050_read_byte(pmydev->pclt,TEMP_OUT_L);data.temp |= mpu6050_read_byte(pmydev->pclt,TEMP_OUT_H) << 8;break;default:return -EINVAL;}if(copy_to_user((void *)arg,&data,sizeof(data))){return -EFAULT;}return sizeof(data); }void init_mpu6050(struct i2c_client *pclt) {mpu6050_write_byte(pclt,PWR_MGMT_1,0x00);mpu6050_write_byte(pclt,SMPLRT_DIV,0x07);mpu6050_write_byte(pclt,CONFIG,0x06);mpu6050_write_byte(pclt,GYRO_CONFIG,0xF8);mpu6050_write_byte(pclt,ACCEL_CONFIG,0x19); }struct file_operations myops = {.owner = THIS_MODULE,.open = mpu6050_open,.release = mpu6050_close,.unlocked_ioctl = mpu6050_ioctl, };static int mpu6050_probe(struct i2c_client *pclt,const struct i2c_device_id *pid) {int ret = 0;dev_t devno = MKDEV(major,minor);/*申请设备号*/ret = register_chrdev_region(devno,mpu6050_num,"mpu6050");if(ret){ret = alloc_chrdev_region(&devno,minor,mpu6050_num,"mpu6050");if(ret){printk("get devno failed\n");return -1;}major = MAJOR(devno);//容易遗漏,注意}pgmydev = (struct mpu6050_dev *)kmalloc(sizeof(struct mpu6050_dev),GFP_KERNEL);if(NULL == pgmydev){unregister_chrdev_region(devno,mpu6050_num);printk("kmalloc failed\n");return -1;}memset(pgmydev,0,sizeof(struct mpu6050_dev));pgmydev->pclt = pclt;/*给struct cdev对象指定操作函数集*/ cdev_init(&pgmydev->mydev,&myops);/*将struct cdev对象添加到内核对应的数据结构里*/pgmydev->mydev.owner = THIS_MODULE;cdev_add(&pgmydev->mydev,devno,mpu6050_num);init_mpu6050(pgmydev->pclt);return 0; }static int mpu6050_remove(struct i2c_client *pclt) {dev_t devno = MKDEV(major,minor);cdev_del(&pgmydev->mydev);unregister_chrdev_region(devno,mpu6050_num);kfree(pgmydev);pgmydev = NULL;return 0; }struct i2c_device_id mpu6050_ids[] = {{"mpu6050",0},{} };struct i2c_driver mpu6050_driver = {.driver = {.name = "mpu6050",.owner = THIS_MODULE,},.probe = mpu6050_probe,.remove = mpu6050_remove,.id_table = mpu6050_ids, };#if 0 int __init mpu6050_driver_init(void) {i2c_add_driver(&mpu6050_driver); }void __exit mpu6050_driver_exit(void) {i2c_del_driver(&mpu6050_driver); } module_init(mpu6050_driver_init); module_exit(mpu6050_driver_exit); #else module_i2c_driver(mpu6050_driver); #endifMODULE_LICENSE("GPL");
#ifndef MPU_6050_H
#define MPU_6050_Hstruct accel_data
{unsigned short x;unsigned short y;unsigned short z;
};
struct gyro_data
{unsigned short x;unsigned short y;unsigned short z;
};union mpu6050_data
{struct accel_data accel;struct gyro_data gyro;unsigned short temp;
};#define MPU6050_MAGIC 'K'#define GET_ACCEL _IOR(MPU6050_MAGIC,0,union mpu6050_data)
#define GET_GYRO _IOR(MPU6050_MAGIC,1,union mpu6050_data)
#define GET_TEMP _IOR(MPU6050_MAGIC,2,union mpu6050_data)#endif使用probed也行
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/i2c.h>static unsigned short mpu6050_addr_list[] =
{0x68,0x69,I2C_CLIENT_END
};static struct i2c_client *gpmpu6050_client = NULL;static int __init mpu6050_client_init(void)
{struct i2c_adapter *padp = NULL;struct i2c_board_info mpu6050_info = {""};strcpy(mpu6050_info.type,"mpu6050");padp = i2c_get_adapter(5);gpmpu6050_client = i2c_new_probed_device(padp,&mpu6050_info,mpu6050_addr_list,NULL);i2c_put_adapter(padp);if(gpmpu6050_client != NULL){return 0;}else{return -ENODEV;}
}static void mpu6050_client_exit(void)
{i2c_unregister_device(gpmpu6050_client);
}module_init(mpu6050_client_init);
module_exit(mpu6050_client_exit);
MODULE_LICENSE("GPL");测试用的APP
#include <sys/types.h>
#include <sys/stat.h>
#include <sys/ioctl.h>
#include <fcntl.h>
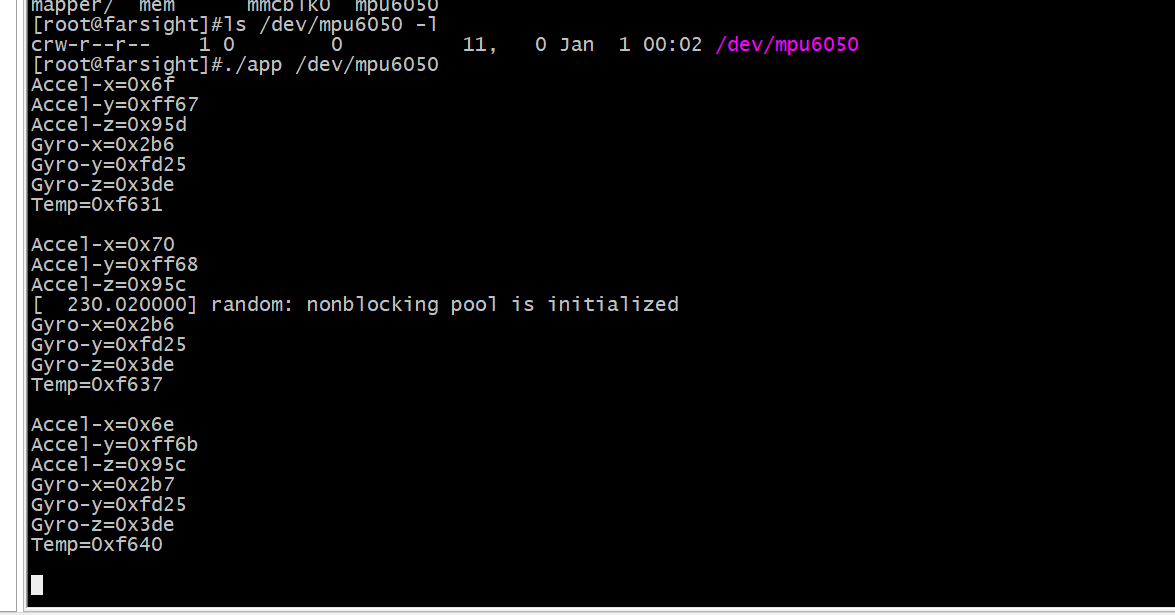
#include <unistd.h>#include <stdio.h>#include "mpu6050.h"int main(int argc,char *argv[])
{int fd = -1;union mpu6050_data data;if(argc < 2){printf("The argument is too few\n");return 1;}fd = open(argv[1],O_RDONLY);if(fd < 0){printf("open %s failed \n",argv[1]);return 2;}while(1){sleep(2);ioctl(fd,GET_ACCEL,&data);printf("Accel-x=0x%x\n",data.accel.x);printf("Accel-y=0x%x\n",data.accel.y);printf("Accel-z=0x%x\n",data.accel.z);ioctl(fd,GET_GYRO,&data);printf("Gyro-x=0x%x\n",data.gyro.x);printf("Gyro-y=0x%x\n",data.gyro.y);printf("Gyro-z=0x%x\n",data.gyro.z);ioctl(fd,GET_TEMP,&data);printf("Temp=0x%x\n",data.temp);printf("\n");}close(fd);fd = -1;return 0;
}
八、I2C总线二级外设驱动开发之设备树匹配
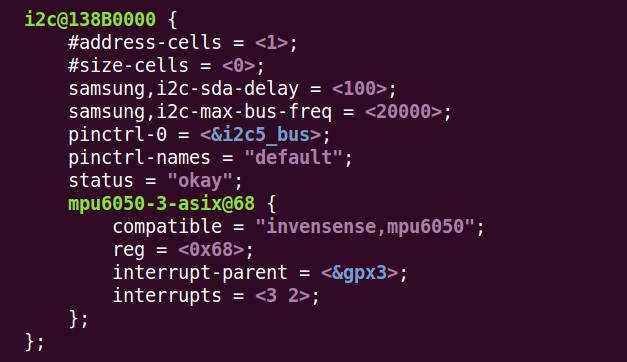
0x68是从设备号,interrupt是中断
IIC的实现和前面LED不太一样那个使用设备树匹配不需要ip IIC需要有一个IP。

#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/fs.h>
#include <linux/i2c.h>
#include <linux/cdev.h>
#include <linux/wait.h>
#include <linux/sched.h>
#include <linux/poll.h>
#include <linux/slab.h>
#include <linux/mm.h>
#include <linux/io.h>
#include <asm/uaccess.h>
#include <asm/atomic.h>#include "mpu6050.h"#define SMPLRT_DIV 0x19
#define CONFIG 0x1A
#define GYRO_CONFIG 0x1B
#define ACCEL_CONFIG 0x1C#define ACCEL_XOUT_H 0x3B
#define ACCEL_XOUT_L 0x3C
#define ACCEL_YOUT_H 0x3D
#define ACCEL_YOUT_L 0x3E
#define ACCEL_ZOUT_H 0x3F
#define ACCEL_ZOUT_L 0x40
#define TEMP_OUT_H 0x41
#define TEMP_OUT_L 0x42
#define GYRO_XOUT_H 0x43
#define GYRO_XOUT_L 0x44
#define GYRO_YOUT_H 0x45
#define GYRO_YOUT_L 0x46
#define GYRO_ZOUT_H 0x47
#define GYRO_ZOUT_L 0x48#define PWR_MGMT_1 0x6Bint major = 11;
int minor = 0;
int mpu6050_num = 1;struct mpu6050_dev
{struct cdev mydev;struct i2c_client *pclt;};struct mpu6050_dev *pgmydev = NULL;int mpu6050_read_byte(struct i2c_client *pclt,unsigned char reg)
{int ret = 0;char txbuf[1] = {reg};char rxbuf[1] = {0};struct i2c_msg msg[2] = {{pclt->addr,0,1,txbuf},{pclt->addr,I2C_M_RD,1,rxbuf}};ret = i2c_transfer(pclt->adapter,msg,ARRAY_SIZE(msg));if(ret < 0){printk("ret = %d,in mpu6050_read_byte\n",ret);return ret;}return rxbuf[0];
}int mpu6050_write_byte(struct i2c_client *pclt,unsigned char reg,unsigned char val)
{int ret = 0;char txbuf[2] = {reg,val};struct i2c_msg msg[1] = {{pclt->addr,0,2,txbuf},};ret = i2c_transfer(pclt->adapter,msg,ARRAY_SIZE(msg));if(ret < 0){printk("ret = %d,in mpu6050_write_byte\n",ret);return ret;}return 0;
}int mpu6050_open(struct inode *pnode,struct file *pfile)
{pfile->private_data =(void *) (container_of(pnode->i_cdev,struct mpu6050_dev,mydev));return 0;
}int mpu6050_close(struct inode *pnode,struct file *pfile)
{return 0;
}long mpu6050_ioctl(struct file *pfile,unsigned int cmd,unsigned long arg)
{struct mpu6050_dev *pmydev = (struct mpu6050_dev *)pfile->private_data;union mpu6050_data data;switch(cmd){case GET_ACCEL:data.accel.x = mpu6050_read_byte(pmydev->pclt,ACCEL_XOUT_L);data.accel.x |= mpu6050_read_byte(pmydev->pclt,ACCEL_XOUT_H) << 8;data.accel.y = mpu6050_read_byte(pmydev->pclt,ACCEL_YOUT_L);data.accel.y |= mpu6050_read_byte(pmydev->pclt,ACCEL_YOUT_H) << 8;data.accel.z = mpu6050_read_byte(pmydev->pclt,ACCEL_ZOUT_L);data.accel.z |= mpu6050_read_byte(pmydev->pclt,ACCEL_ZOUT_H) << 8;break;case GET_GYRO:data.gyro.x = mpu6050_read_byte(pmydev->pclt,GYRO_XOUT_L);data.gyro.x |= mpu6050_read_byte(pmydev->pclt,GYRO_XOUT_H) << 8;data.gyro.y = mpu6050_read_byte(pmydev->pclt,GYRO_YOUT_L);data.gyro.y |= mpu6050_read_byte(pmydev->pclt,GYRO_YOUT_H) << 8;data.gyro.z = mpu6050_read_byte(pmydev->pclt,GYRO_ZOUT_L);data.gyro.z |= mpu6050_read_byte(pmydev->pclt,GYRO_ZOUT_H) << 8;break;case GET_TEMP:data.temp = mpu6050_read_byte(pmydev->pclt,TEMP_OUT_L);data.temp |= mpu6050_read_byte(pmydev->pclt,TEMP_OUT_H) << 8;break;default:return -EINVAL;}if(copy_to_user((void *)arg,&data,sizeof(data))){return -EFAULT;}return sizeof(data);
}void init_mpu6050(struct i2c_client *pclt)
{mpu6050_write_byte(pclt,PWR_MGMT_1,0x00);mpu6050_write_byte(pclt,SMPLRT_DIV,0x07);mpu6050_write_byte(pclt,CONFIG,0x06);mpu6050_write_byte(pclt,GYRO_CONFIG,0xF8);mpu6050_write_byte(pclt,ACCEL_CONFIG,0x19);
}struct file_operations myops = {.owner = THIS_MODULE,.open = mpu6050_open,.release = mpu6050_close,.unlocked_ioctl = mpu6050_ioctl,
};static int mpu6050_probe(struct i2c_client *pclt,const struct i2c_device_id *pid)
{int ret = 0;dev_t devno = MKDEV(major,minor);/*申请设备号*/ret = register_chrdev_region(devno,mpu6050_num,"mpu6050");if(ret){ret = alloc_chrdev_region(&devno,minor,mpu6050_num,"mpu6050");if(ret){printk("get devno failed\n");return -1;}major = MAJOR(devno);//容易遗漏,注意}pgmydev = (struct mpu6050_dev *)kmalloc(sizeof(struct mpu6050_dev),GFP_KERNEL);if(NULL == pgmydev){unregister_chrdev_region(devno,mpu6050_num);printk("kmalloc failed\n");return -1;}memset(pgmydev,0,sizeof(struct mpu6050_dev));pgmydev->pclt = pclt;/*给struct cdev对象指定操作函数集*/ cdev_init(&pgmydev->mydev,&myops);/*将struct cdev对象添加到内核对应的数据结构里*/pgmydev->mydev.owner = THIS_MODULE;cdev_add(&pgmydev->mydev,devno,mpu6050_num);init_mpu6050(pgmydev->pclt);return 0;
}static int mpu6050_remove(struct i2c_client *pclt)
{dev_t devno = MKDEV(major,minor);cdev_del(&pgmydev->mydev);unregister_chrdev_region(devno,mpu6050_num);kfree(pgmydev);pgmydev = NULL;return 0;
}struct of_device_id mpu6050_dt[] =
{{.compatible = "invensense,mpu6050"},{}
};struct i2c_device_id mpu6050_ids[] =
{{"mpu6050",0},{}
};struct i2c_driver mpu6050_driver =
{.driver = {.name = "mpu6050",.owner = THIS_MODULE,.of_match_table = mpu6050_dt,},.probe = mpu6050_probe,.remove = mpu6050_remove,.id_table = mpu6050_ids,
};#if 0
int __init mpu6050_driver_init(void)
{i2c_add_driver(&mpu6050_driver);
}void __exit mpu6050_driver_exit(void)
{i2c_del_driver(&mpu6050_driver);
}
module_init(mpu6050_driver_init);
module_exit(mpu6050_driver_exit);
#else
module_i2c_driver(mpu6050_driver);
#endifMODULE_LICENSE("GPL");
测试程序和.h程序和上面一样。
相关文章:
IIC总线式驱动开发(mpu6050)(二)
目录 六、I2C总线二级外设驱动开发方法 七、I2C总线二级外设驱动开发之名称匹配 1. i2c_register_board_info 2. i2c_new_device:明确二级外设地址的情况下可用 3. i2c_new_probed_device 八、I2C总线二级外设驱动开发之设备树匹配 六、I2C总线二级外设驱动开…...

盘点一下那些远程办公的神仙公司
其实远程办公已经有50多年的历史了,这几年,这种工作方式越来越受到大家的喜欢,对于员工来说,工作效率可以大幅提高,节省下来的通勤时间和成本,有更多的时间花在工作上。可以更好的平衡工作与生活。对于公司…...

Spring Cloud Alibaba全家桶(四)——微服务调用组件Feign
前言 本文小新为大家带来 微服务调用组件Feign 的相关知识,具体内容包含什么是Feign,Spring Cloud Alibaba快速整合OpenFeign,Spring Cloud Feign的自定义配置及使用(包括:日志配置、契约配置、自定义拦截器实现认证逻…...
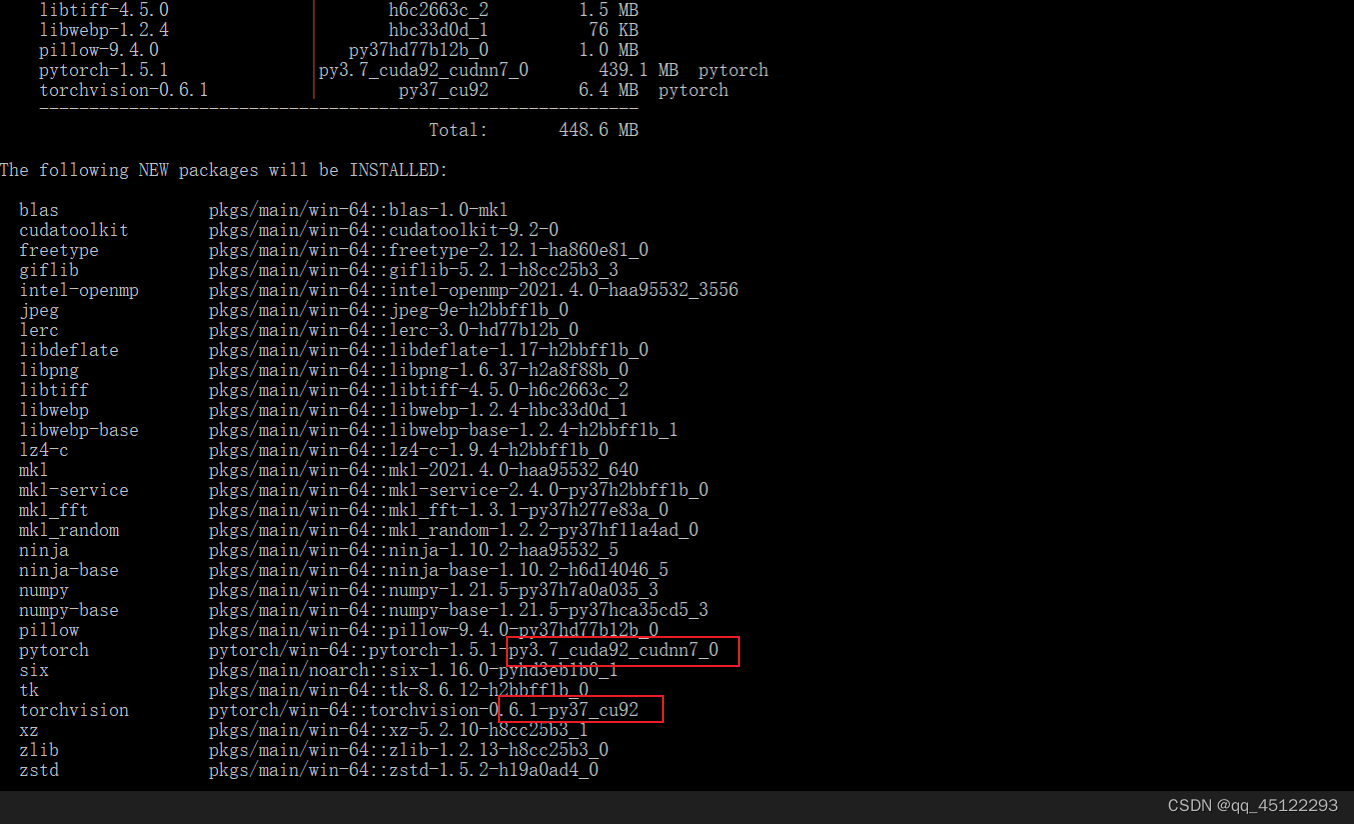
安装pytorch
一、在anaconda中创建虚拟环境 打开Anaconda Prompt创建一个虚拟环境。比如要创建一个名字为pytorch的虚拟环境,可以如下输入。其中python3.7指定该虚拟环境的python版本号。 conda create -n pytorch python3.7 二、进入新创建的虚拟环境。 创建好虚拟环境后&a…...

自动化测试 Appium之Python运行环境搭建 Part2
环境部署 1、安装Android SDK 安装好后,配置ANDROID_HOME环境变量,设置为Android SDK安装路径(例中:D:\Program Files (x86)\Android\android-sdk) 2、安装其它SDK相关软件包 安装好Android SDK后,选择打开Android SDK Manager…...

LeetCode 2 - 两数相加
给你两个 非空 的链表,表示两个非负的整数。它们每位数字都是按照 逆序 的方式存储的,并且每个节点只能存储 一位 数字。 请你将两个数相加,并以相同形式返回一个表示和的链表。 你可以假设除了数字 0 之外,这两个数都不会以 0 开…...

用Python实现九九乘法表的几种方式,最简单只需一行代码
前言 嗨喽~大家好呀,这里是魔王呐 ❤ ~! 我们在学习Python的过程中需要不断的积累和练习,这样才能够走的更远, 今天一起来学习怎么用Python写九九乘法表~ 更多教程源码资料电子书: 点击此处跳转文末名片获取 第一种方法、for-for 代码&…...

入职外包三个月,我提桶跑路了
有一种打工人的羡慕,叫做“大厂”。 真是年少不知大厂香,错把青春插稻秧。 但是,在深圳有一群比大厂员工更庞大的群体,他们顶着大厂的“名”,做着大厂的工作,还可以享受大厂的伙食,却没有大厂…...

企业邮箱对企业有哪些好处以及便捷性
企业邮箱拥有更专业的办公功能,更适合职场使用。同时,使用企业邮箱还可以帮助企业“公私分明”。一方面保护了公司信息,另一方面也提高了工作效率。加上公司统一邮箱也有助于提升公司形象。使用企业邮箱除了收发邮件方便外,还可以…...
ConvNeXt V2实战:使用ConvNeXt V2实现图像分类任务(一)
文章目录摘要安装包安装timm安装 grad-cam数据增强Cutout和MixupEMA项目结构计算mean和std生成数据集关于不上分的问题摘要 论文:https://arxiv.org/pdf/2301.00808.pdf 论文翻译:https://wanghao.blog.csdn.net/article/details/128541957 官方源码&am…...

3.2 报错整理
报错1: 报错:RuntimeError: DataLoader worker (pid 93789) is killed by signal: Killed.原因:显存不够报错2: 报错:TqdmWarning: IProgress not found. Please update jupyter and ipywidgets.解决:pip i…...
从0开始学python -46
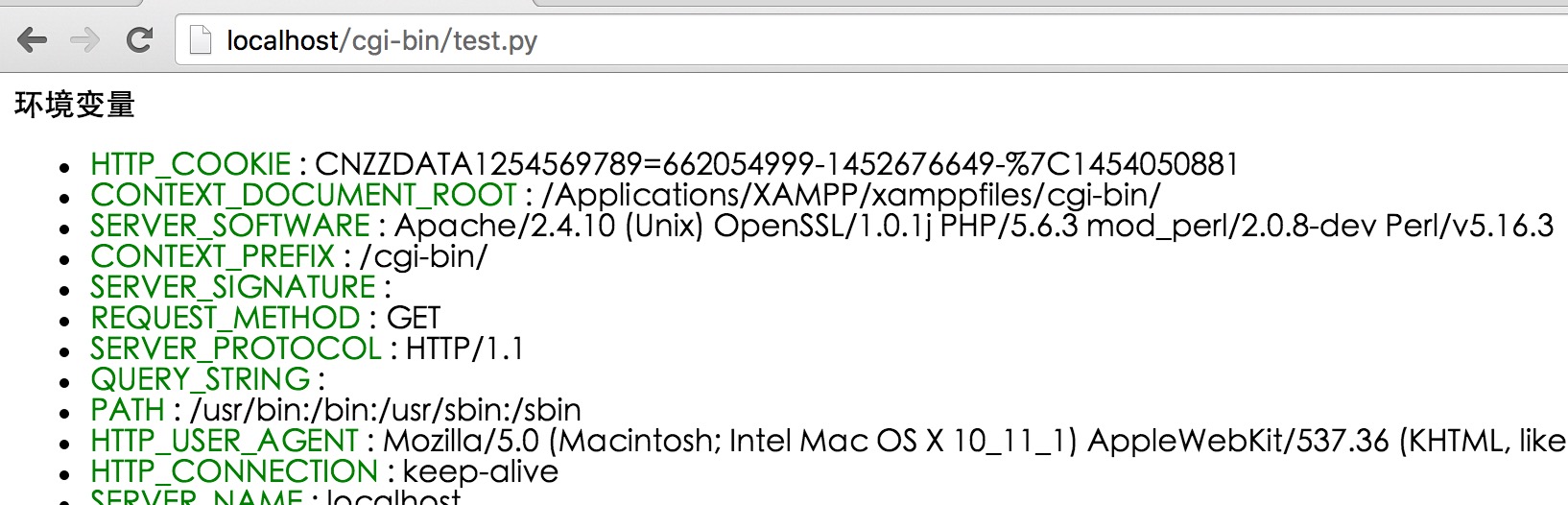
Python CGI编程 什么是CGI CGI 目前由NCSA维护,NCSA定义CGI如下: CGI(Common Gateway Interface),通用网关接口,它是一段程序,运行在服务器上如:HTTP服务器,提供同客户端HTML页面的接口。 网页浏览 为了更好的了解CGI是如何工作…...

JavaScript事件委托机制详解
一、什么是事件委托机制 事件委托机制就是:我们给元素添加click事件时不在该元素上添加,而是委托给某个公共的祖辈元素,告诉祖辈元素如果接收到了click事件,并且这个click事件是由该元素触发的,就执行祖辈元素上委托绑…...

【项目实战】MySQL中union和union all的相同点与不同点
一、union和union all的相同点 在MySQL中,Union和Union All都是用来合并两个或者多个查询结果集的关键字 二、union和union all的不同点 union复杂,union all简单 2.1 自动压缩,自动求并集、去重、排序操作 (1)unio…...
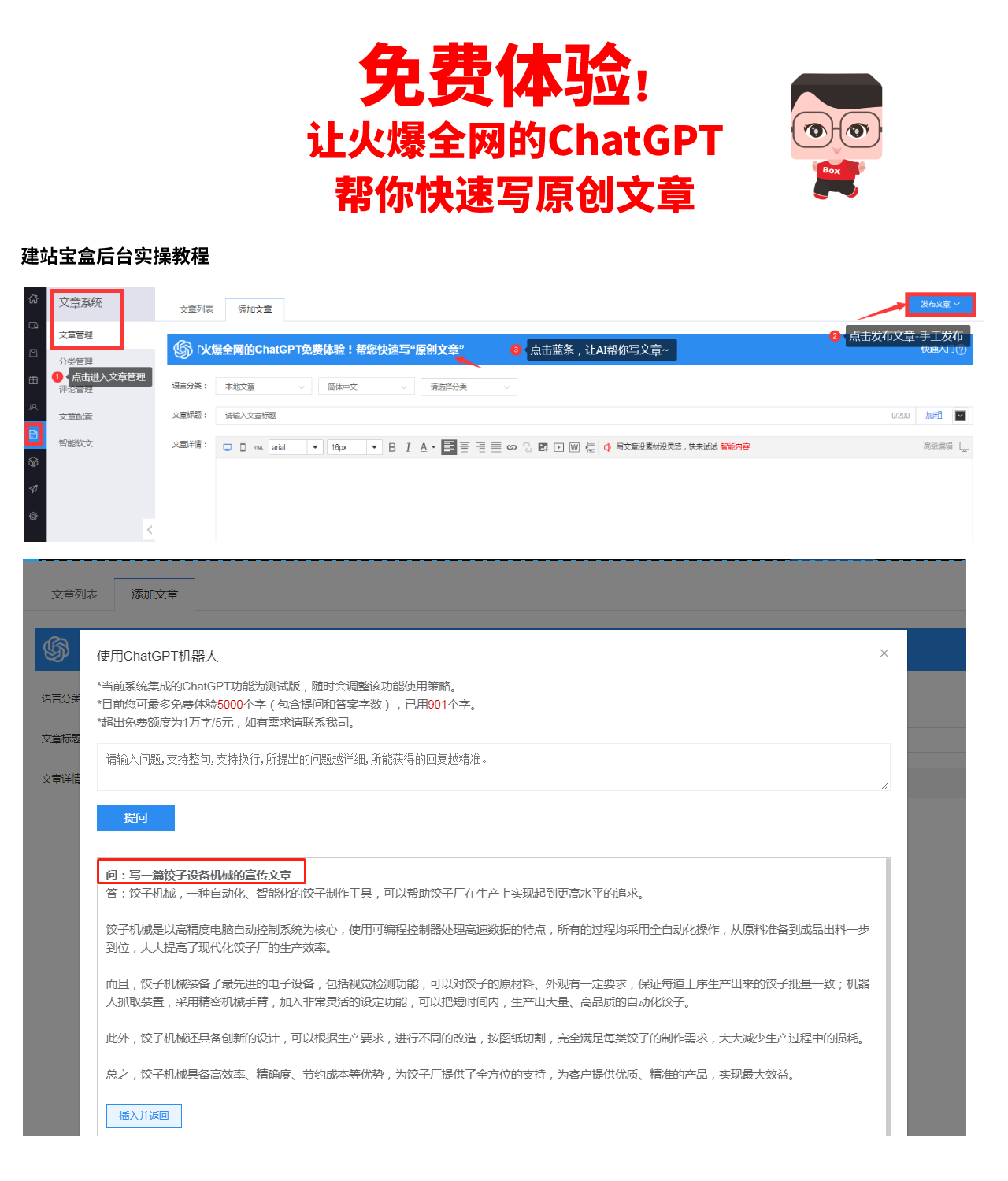
ChatGPT最牛应用,让它帮你更新网站新闻吧!
谁能想到,ChatGPT火了!既能对话入流,又能写诗歌论文、出面试题、编代码,甚至还通过了谷歌面试拿到L3工程师offer,放在一年之前,没人相信这是当前AI能够达到的水平。ChatGPT自面世以来,凭借其极为…...
乌班图安装kvm并配置网络
乌班图22安装KVM 1.安装KVM sudo apt install qemu-kvm libvirt-daemon-system libvirt-clients bridge-utils virt-manager virtinstsudo adduser id -un libvirt sudo adduser id -un kvm sudo apt install virtinst qemu-efi sudo systemctl enable --now libvirtd sudo s…...

蓝库云|ERP系统在企业数字化转型中最常用的八大功能
ERP系统和与企业数字化转型 随着数字化发展的兴起,规划和管理已成为企业产生富有成效的成果的关键。许多企业采用了企业资源规划 (ERP) 等先进工具,使企业所有者能够以高效的方式规划和管理其资源和运营。 ERP系统负责整合业务的不同流程并向决策者提供…...

Pytorch学习笔记#1:拟合函数/梯度下降
学习自https://pytorch.org/tutorials/beginner/pytorch_with_examples.html 概念 Pytorch Tensor在概念上和Numpy的array一样是一个nnn维向量的。不过Tensor可以在GPU中进行计算,且可以跟踪计算图(computational graph)和梯度(…...

挑战图像处理100问(24)——伽玛校正
伽马校正(Gamma Correction)是一种图像处理技术,用于校正显示设备的非线性响应。通过对图像进行伽马变换,可以将图像的亮度范围映射到显示设备的亮度范围内,从而提高图像的对比度和细节,改善图像的视觉效果…...
软考论文评分标准(附历年高项论文题目汇总))
高级信息系统项目管理师(高项)软考论文评分标准(附历年高项论文题目汇总)
1、如果您想了解如何高分通过高级信息系统项目管理师(高项)你可以点击一下链接: 高级信息系统项目管理师(高项)高分通过经验分享_高项经验 2、如果您想了解更多的高级信息系统项目管理(高项 软考)原创论文࿰…...

VisualCppRedist AIO:一站式解决Windows应用程序运行库缺失难题
VisualCppRedist AIO:一站式解决Windows应用程序运行库缺失难题 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist 在Windows系统中,你是否经…...

淘宝商品详情 API 实现标题 / SKU / 主图批量采集
item_get_pro-获得淘宝商品详情高级版请求示例-- 请求示例 url 默认请求参数已经URL编码处理 curl -i "https://api-服务器.cn/taobao/item_get_pro/?key<您自己的apiKey>&secret<您自己的apiSecret>&num_iid678121631641"响应示例"num_ii…...

AI模型Docker镜像构建指南:从环境封装到生产部署
1. 项目概述:一个AI模型镜像的诞生与价值最近在开发者社区里,看到不少朋友在讨论一个名为xianyu110/claude4.5的镜像。乍一看这个标题,很多刚接触的朋友可能会有点懵:这到底是啥?是一个新的开源项目,还是一…...

订阅Token Plan套餐后在长期项目中的成本节约效果分析
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 订阅Token Plan套餐后在长期项目中的成本节约效果分析 对于需要持续、稳定调用大模型的个人开发者或团队而言,成本控制…...

策略梯度定理实战解析:从蒙特卡洛回报到PyTorch梯度实现
1. 这不是数学课,是写给实战者的政策梯度定理手记你打开这篇文字的时候,大概率正卡在某个强化学习项目里:模型跑不通、梯度爆炸、训练曲线像心电图一样乱跳,或者更糟——明明代码和论文一模一样,但 reward 就是上不去。…...
:ELK日志采集实战,集中分析接口异常、慢请求和用户上传问题)
Pytorch图像去噪实战(七十三):ELK日志采集实战,集中分析接口异常、慢请求和用户上传问题
Pytorch图像去噪实战(七十三):ELK日志采集实战,集中分析接口异常、慢请求和用户上传问题 一、问题场景:日志散落在各个容器里,排查问题非常痛苦 图像去噪服务上线后,日志会越来越多: FastAPI访问日志 模型推理日志 Nginx访问日志 Worker任务日志 Celery错误日志 GPU异…...

Web技术为何称王?五大核心优势碾压原生应用,一文读懂现代Web的统治力
本文深入剖析Web技术(涵盖H5、PWA及现代Web App)相对于原生APP的五大核心优势:跨平台低成本、免安装热更新、无缝分发能力、技术生态与标准演进、AI融合前景。通过详实的数据对比与技术架构拆解,揭示为什么Web依然是数字世界的终极…...

使用 Taotoken CLI 工具一键配置团队开发环境中的大模型密钥
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用 Taotoken CLI 工具一键配置团队开发环境中的大模型密钥 在团队协作开发中,统一管理大模型 API 密钥和端点配置是一…...

词达人自动化工具:如何用智能技术将30分钟学习任务压缩到3分钟完成?
词达人自动化工具:如何用智能技术将30分钟学习任务压缩到3分钟完成? 【免费下载链接】cdr 微信词达人,高正确率,高效简洁。支持班级任务及自选任务 项目地址: https://gitcode.com/gh_mirrors/cd/cdr 在当今数字化教育环境…...

IP核验证责任共担模型:从授权方到被授权方的实践策略
1. IP核验证的责任边界:一场持续多年的行业对话在SoC设计领域,IP核的集成与验证从来都不是一个轻松的话题。随着芯片设计复杂度的指数级增长,一个现代SoC中可能集成了数十甚至上百个来自不同供应商的IP核,从处理器、内存控制器到各…...