ubuntu20.04在noetic下编译orbslam2
ubuntu20.04在noetic下编译orbslam2
参考链接1:https://blog.csdn.net/qq_58869016/article/details/128660588
参考链接2:https://blog.csdn.net/dong123456789e/article/details/129693837
在noetic下的安装环境
1.库安装
sudo apt-get update
sudo apt-get install cmake gcc g++ git
sudo apt-get install libblas-dev liblapack-dev
2.安装Pangolin0.5
sudo apt-get install libxkbcommon-dev
sudo apt-get install wayland-protocols
sudo apt install libglew-dev
git clone https://github.com/cheukwaylee/Pangolin-0.5
cd Pangolin
mkdir build
cd build
cmake ..
make -j
sudo make install
3.源码编译安装Eigen3.3.9:
http://eigen.tuxfamily.org/index.php?title=Main_Page
mkdir build
cd build
cmake ..
make
sudo make install
4.ROS-Noetic自带Opencv4.2,因此无需另外安装Opencv。
在编译之前需要修改的地方
第一处修改
将ORB_SLAM2, Example/ROS/ORB_SLAM2 以及Thirdparty/DBoW2下的CMakelist.txt中修改opencv版本
#原find_package(OpenCV 3.0 QUIET)
find_package(OpenCV 4.2 QUIET)
if(NOT OpenCV_FOUND)find_package(OpenCV 2.4.3 QUIET)if(NOT OpenCV_FOUND)message(FATAL_ERROR "OpenCV > 2.4.3 not found.")endif()
endif()
第二处修改
ORBextractor.h中头文件修改
#include <vector>
#include <list>
// #include <opencv/cv.h> 这一行注释掉,添加以下两行
#include<opencv2/imgproc/imgproc_c.h>
#include <opencv2/highgui/highgui_c.h>
第三处修改
在Example/Monocular ,Stereo,RGB-D下面的.cc文件中
# 参考链接:https://blog.csdn.net/m0_56140527/article/details/132496600#将下行中CV_LOAD_IMAGE_UNCHANGED替换为cv::IMREAD_UNCHANGED# im = cv::imread(vstrImageFilenames[ni],CV_LOAD_IMAGE_UNCHANGED);im = cv::imread(vstrImageFilenames[ni],cv::IMREAD_UNCHANGED);#这是因为opencv4.x以上,有些宏,API名字改了,需要改为新的#CV_LOAD_IMAGE_UNCHANGED 改为 cv::IMREAD_UNCHANGED#CV_LOAD_IMAGE_GRAYSCALE 改为 cv::IMREAD_GRAYSCALE#CV_LOAD_IMAGE_COLOR 改为 cv::IMREAD_COLOR#CV_LOAD_IMAGE_ANYDEPTH 改为 cv::IMREAD_ANYDEPTH#CV_MINMAX 改成 NORM_MINMAX
调用安卓相机实时运行单目模式下的slam
1、下载Android_Camera-IMU,将其中的Camera-Imu.apk文件发送至手机端进行安装。
git clone https://github.com/hitcm/Android_Camera-IMU.git
2.安装工具包
sudo apt-get install ros-noetic-imu-tools # 修改对应自己的 ROS 版本
3.查看自己电脑的ip 地址:
ip address
获得地址后,在手机端打开Camera-Imu.apk,将ip地址输入,点击Connect
4.调用手机相机
第一个终端:
roscore
第二个终端cd Android_Camera-IMUroslaunch android_cam-imu.launch在rviz中设置:

在By topic中添加Image显示图像,添加Imu显示imu(注意要将Fixed Frame的map修改为//imu,之后会显示/imu)
在运行ORB_SLAM2之前对相机进行标定
1.
安装相机校准功能包:
sudo apt-get install ros-noetic-camera-calibrationsudo apt-get install libcanberra-gtk-module
终端1运行:
roscore
终端2运行:
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.024 image:=/camera/image_raw camera:=/camera --no-service-check
标定后,点击
CALIBRATE
SAVE
查看标定以后的文件内容如右图所示。 <camera_matrix type_id=“opencv-matrix”> 是相机内参矩阵,顺序为 fx, 0, cx; 0, fy, cy; 0, 0, 1。 <distortion_coefficients type_id=“opencv-matrix”> 是畸变参数,其顺序为 k1, k2, p1, p2, k3。
然后在/catkin_ws/src/ORB_SLAM2/Examples/Monocular/目录下中新建一个配置文件 AndroidPhone.yaml
运行
终端1:
roscore
终端2:
cd Android_Camera-IMU
roslaunch android_cam-imu.launch终端3:rosrun ORB_SLAM2 Mono /home/xxx/catkin_ws/src/ORB_SLAM2/Vocabulary/ORBvoc.txt /home/xxx/catkin_ws/src/ORB_SLAM2/Examples/Monocular/AndroidPhone.yaml
相关文章:
ubuntu20.04在noetic下编译orbslam2
ubuntu20.04在noetic下编译orbslam2 参考链接1:https://blog.csdn.net/qq_58869016/article/details/128660588 参考链接2:https://blog.csdn.net/dong123456789e/article/details/129693837 在noetic下的安装环境 1.库安装 sudo apt-get update sudo …...
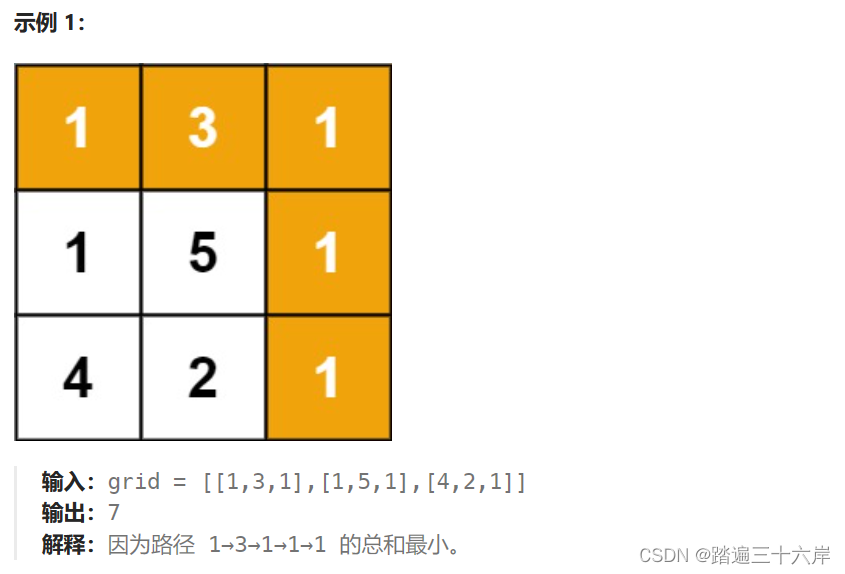
64. 最小路径和
最小路径和 描述 : 给定一个包含非负整数的 m x n 网格 grid ,请找出一条从左上角到右下角的路径,使得路径上的数字总和为最小。 说明:每次只能向下或者向右移动一步。 题目 : LeetCode 64.最小路径和 64. 最小路径和 解析 : class So…...
)
惰性加载函数(js的问题)
在web开发中,因为浏览器之间的实现差异,一些嗅探工作总是不可避免。 var addEvent function( elem, type, handler ){if ( window.addEventListener ){return elem.addEventListener( type, handler, false );}if ( window.attachEvent ){return elem.…...
jmeter,读取CSV文件数据的循环控制
1、构造csv数据 保存文件时需要注意文件的编码格式 id,name,limit,status,address,start_time 100,小米100,1000,1,某某会展中心101,2023/8/20 14:20 101,小米101,1001,1,某某会展中心102,2023/8/21 14:20 2、在线程组下添加【CSV数据文件设置】元件 3、CSV文件数据的循环控…...
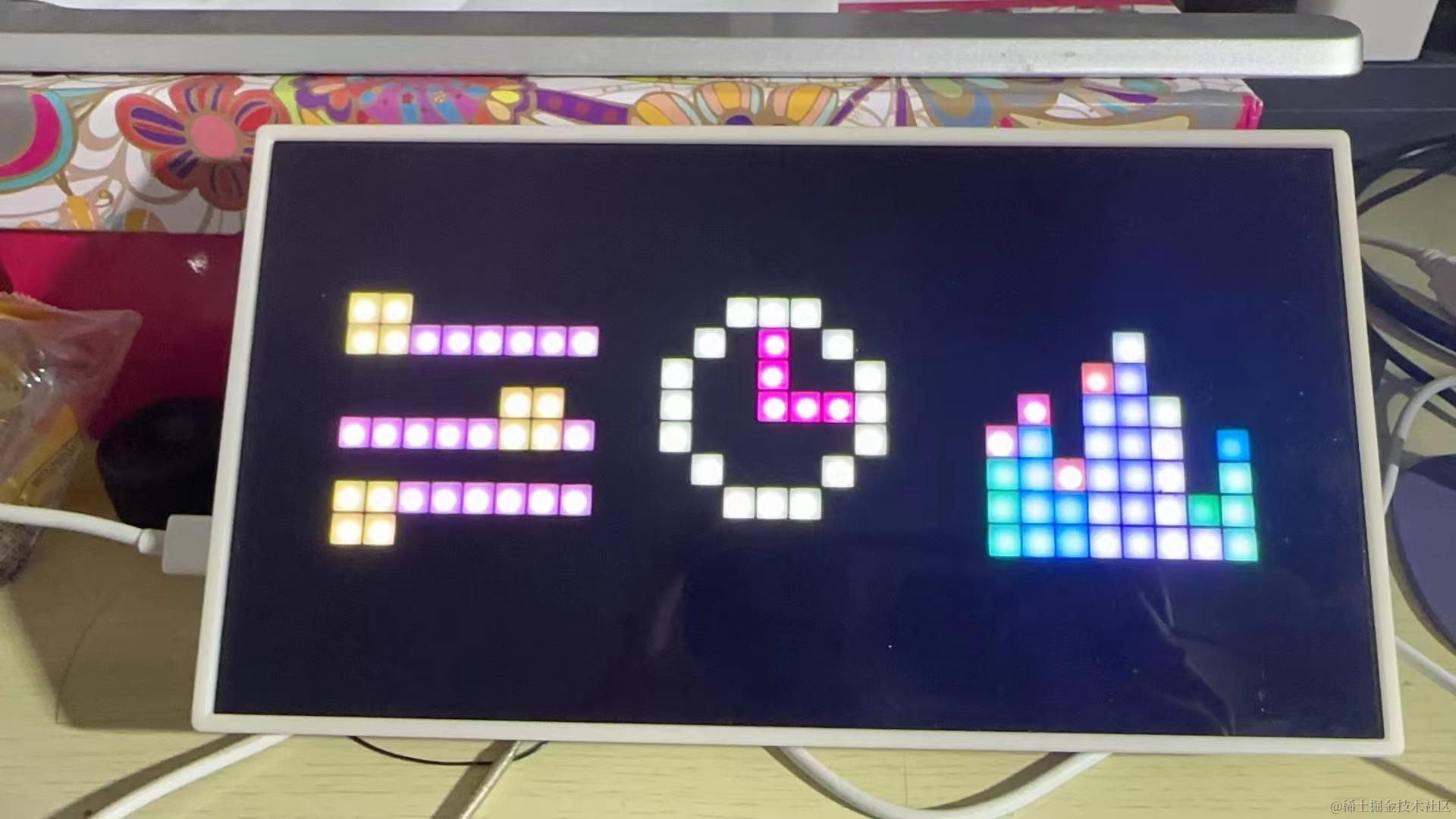
移植LVGL到像素屏,从此玩转像素屏0门槛
硬件方面 先上渲染图 实物图 配置 主控:esp32 micro32 plus主频:240MhzFlash:8MPSRAM:2M 软件方面 众所周知,LVGL是一个十分优秀的图形框架,小到几百kb的单片机,大到Linux都可以运行。既然它…...
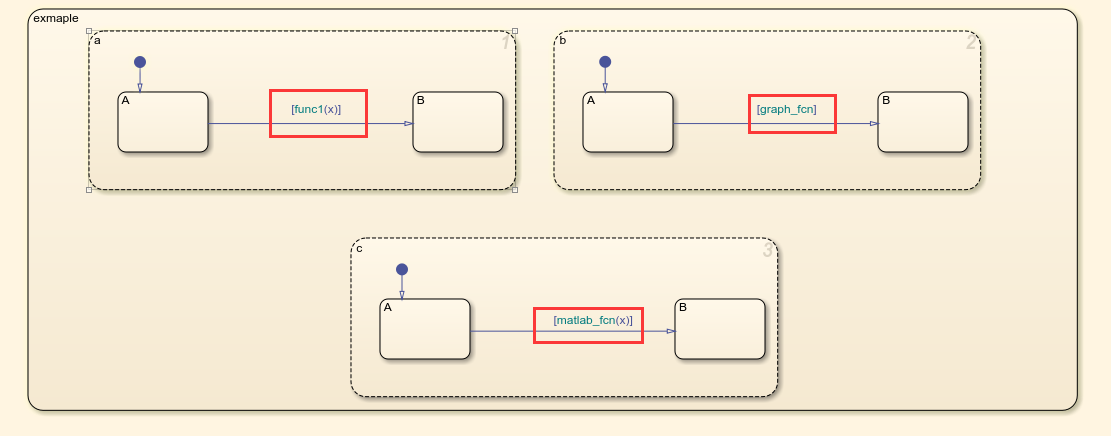
stateflow 之图函数、simulink函数和matlab函数使用及案例分析
目录 前言 1. 图函数graph function 2.simulink function 3.matlab function 4.调用stateflow中的几种函数方式 前言 对于stateflow实际上可以做simulink和matlab的所有任务,可以有matlab的m语言,也可以有simulink的模块,关于几种函数在…...

C# 加载本地文件设置应用程序图标
static class Program{[STAThread]static void Main(){Application.EnableVisualStyles();Application.SetCompatibleTextRenderingDefault(false);Form mainForm new Form1();mainForm.Show();//IntPtr hProcess Process.GetCurrentProcess().MainWindowHandle;// 设置应用程…...

苹果计划将全球1/4的IPhone产能转移至印度
KlipC报道:据相关人士报道,苹果希望在未来2到3年内每年在印度生产超过5000万部iphone,要是该计划得以实现,印度将占领全球iPhone产量的四分之一。 KlipC的分析师Alex Su表示:“此次iPhone15推出是苹果印度制造计划的一…...

el-date-picker 选择一个或多个日期
el-date-picker可选择多个日期 type“dates” 加个s即可 <div><span>el-date-picker选择多个日期</span><el-date-pickertype"dates"v-model"dateList"placeholder"选择一个或多个日期"></el-date-picker></di…...

5个创建在线帮助文档的好方法!
在线帮助文档是企业为用户提供支持服务的重要工具,它能够帮助用户更好地了解和使用产品,提高用户体验。然而,创建一份优秀的在线帮助文档需要掌握一定的技巧和方法。接下来就介绍一下创建在线帮助文档的5个好方法,帮助企业更好地为…...

听GPT 讲Rust源代码--src/tools(14)
File: rust/src/tools/rust-analyzer/crates/cfg/src/lib.rs 在Rust源代码中,rust/src/tools/rust-analyzer/crates/cfg/src/lib.rs这个文件是Rust语言分析器(Rust Analyzer)的一部分,用于处理和管理条件编译指令(Cond…...
)
arcgis api for js 中使用API的代理页面(跨越配置)
以下仅作为自己阅读官网api的对reques的理解做的备忘笔记。一知半解,仅供参考。 1、获取或者构建第三方代理 官网解释:代理在其自己的 Web 服务器上安装并运行,而不是在 Esri 服务器或安装了 ArcGIS Enterprise 的计算机上安装和运行&#…...
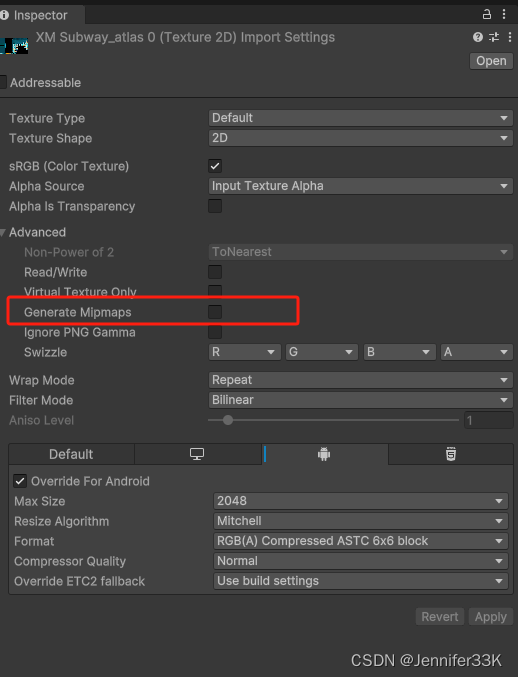
Unity_FairyGUI发布导入Unity编辑器资源报错
Unity_FairyGUI发布导入Unity编辑器资源报错 报错: FairyGUI: settings for Assets/UI/XMUI/XMSubway_atlas0.png is wrong! Correct values are: (Generate Mip Mapsunchecked) UnityEngine.Debug:LogWarning (object) FairyGUI.UIPackage:LoadAtlas (FairyGUI.P…...
)
1.5【应用开发】缓冲区(二)
二,附加缓冲区 你可以通过分别调用以下函数来附加一个缓冲区(screen_buffer_t类型),以将其与像素图、流或窗口相关联: screen_attach_pixmap_buffer() //用于附加像素图缓冲区 screen_attach_stream_buffers()//用于附加流缓冲区 screen_attach_window_buffers()屏幕附加…...

RTMP流设置超时时间失败
使用FFmpeg(版本是5.0.3)将rtmp流作为输入,设置超时时间(使用-timeout参数),结果报错:Cannot open Connection tcp://XXX:1935?listen&listen_timeout 通过./ffmpeg -help full 命令查看FFmpeg帮助&am…...

如何一步步让MySQL支撑亿级流量
1 主从读写分离 大部分互联网业务都是读多写少,因此优先考虑DB如何支撑更高查询数,首先就需要区分读、写流量,这才方便针对读流量单独扩展,即主从读写分离。 若前端流量突增导致从库负载过高,DBA会优先做个从库扩容上去…...
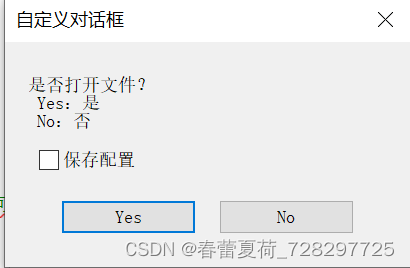
MFC CLXHHandleEngine动态库-自定义设置对话框使用
实现的效果如下所示: void CSampleDlg::OnBnClickedButton2() { // TODO: 在此添加控件通知处理程序代码 CSgxMemDialog dlg(180, 100); dlg.SetEnable(true); dlg.SetWindowTitle(_T("自定义对话框")); dlg.AddStatic(1000, //控件资源…...
Python生成器(Generator)(继续更新...)
学习网页: Welcome to Python.orghttps://www.python.org/https://www.python.org/ Python生成器 生成器(Generator)是 Python 的一种特殊类型的迭代器。生成器允许你创建自己的数据流,每次从数据流中获取一个元素,…...
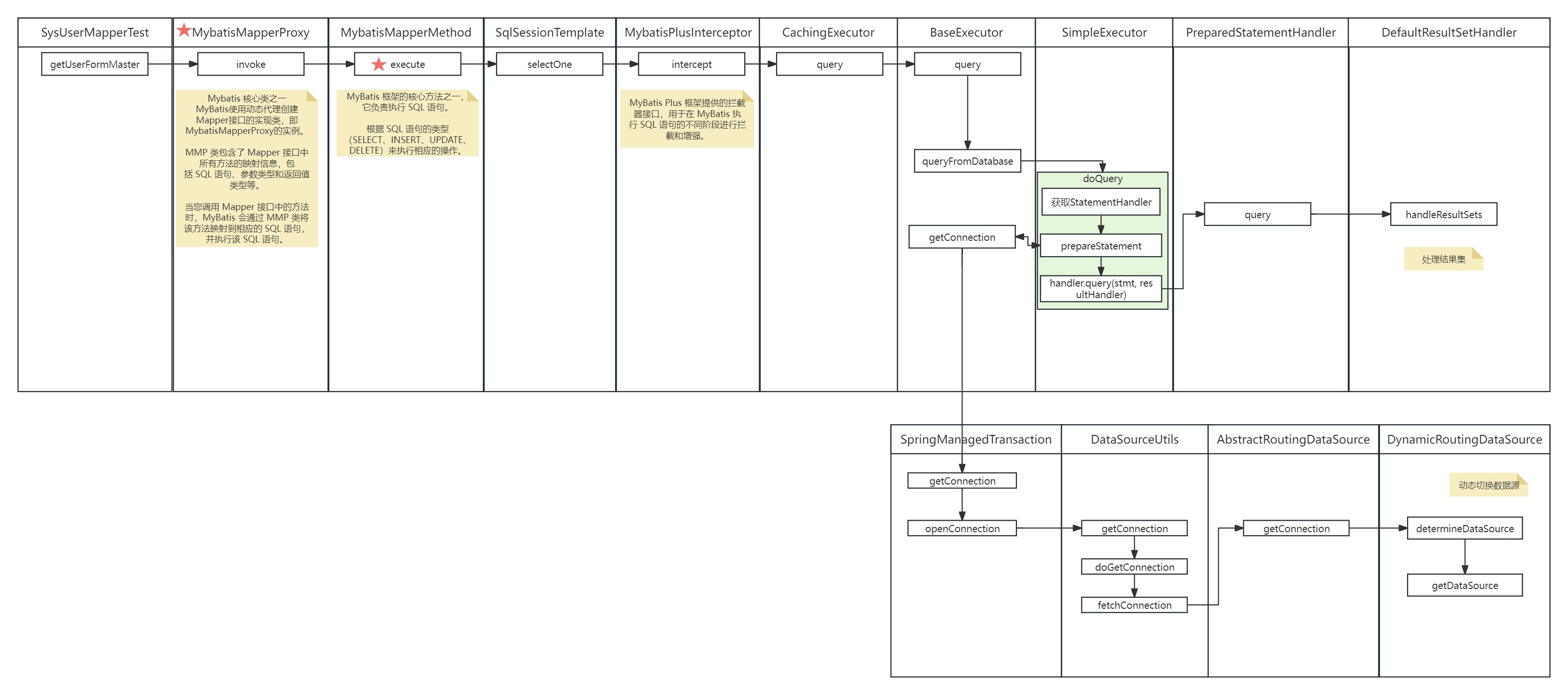
Spring Boot 3 整合 Mybatis-Plus 动态数据源实现多数据源切换
🚀 作者主页: 有来技术 🔥 开源项目: youlai-mall 🍃 vue3-element-admin 🍃 youlai-boot 🌺 仓库主页: Gitee 💫 Github 💫 GitCode 💖 欢迎点赞…...

快速学习C++中的模板
模板是一个让C支持范型编程的重要功能,它本质上是一个万能变量适配器;vector,pair等都是使用模板实现的 模板是C的一个强大特性,它允许您编写通用的代码来处理不同的数据类型。您可以有函数模板和类模板。 函数模板: 函数模板允许您创建一…...

危化园区 ReID 跨镜管控难,镜像视界无感定位筑牢安全防线
危化园区 ReID 跨镜管控难,镜像视界无感定位筑牢安全防线危化工业园区作为化工生产、仓储、运输的核心载体,承载着易燃易爆、有毒有害等高危物料的全流程作业,其安全管控水平直接关系到人员生命安全、财产安全与生态环境安全。不同于普通工业…...

【限时开放】Midjourney未来主义风格权威认证路径:完成这5个里程碑任务,获取由Adobe+MJ Labs联合签发的Futurism Prompt Architect证书
更多请点击: https://intelliparadigm.com 第一章:【限时开放】Midjourney未来主义风格权威认证路径:完成这5个里程碑任务,获取由AdobeMJ Labs联合签发的Futurism Prompt Architect证书 什么是未来主义Prompt架构师认证…...

对话式AI智能中继与编排框架:构建高可用AI应用的核心架构
1. 项目概述:一个面向对话式AI的智能中继与编排框架最近在折腾一个挺有意思的开源项目,叫ChatAgentRelay。乍一看这个名字,可能觉得它又是一个聊天机器人框架,但深入把玩之后,我发现它的定位其实更精准,也更…...

碧蓝航线Alas自动化脚本:10分钟解放双手的智能游戏助手
碧蓝航线Alas自动化脚本:10分钟解放双手的智能游戏助手 【免费下载链接】AzurLaneAutoScript Azur Lane bot (CN/EN/JP/TW) 碧蓝航线脚本 | 无缝委托科研,全自动大世界 项目地址: https://gitcode.com/gh_mirrors/az/AzurLaneAutoScript 还在为每…...

ModernBERT:用现代训练技术重塑经典BERT,实现性能与效率双提升
1. 项目概述:为什么我们需要一个“现代”的BERT?如果你在过去几年里深度参与过自然语言处理(NLP)项目,那么对BERT这个名字一定不会陌生。作为Transformer架构在预训练领域的里程碑,BERT彻底改变了我们处理文…...

车载网络测试演进:从CAN总线到TSN与SOA的实战解析
1. 项目概述:一场关于“神经”与“体检”的进化史几年前,我和几个同行在路边摊就着麻小和扎啤,聊起车载以太网测试,那时它还是个新鲜玩意儿,大家讨论的焦点更多是“要不要做”和“怎么做”。几年过去,再回头…...

告别臃肿!Dell G15散热控制开源替代方案全解析
告别臃肿!Dell G15散热控制开源替代方案全解析 【免费下载链接】tcc-g15 Thermal Control Center for Dell G15 - open source alternative to AWCC 项目地址: https://gitcode.com/gh_mirrors/tc/tcc-g15 还在为Dell G15游戏本自带的AWCC散热控制软件启动慢…...

Android自动化测试代理droidrun-agent:架构、原理与实战部署
1. 项目概述:一个面向Android应用的自动化测试代理在移动应用开发,尤其是Android生态中,自动化测试是保证应用质量、提升迭代效率的基石。无论是回归测试、兼容性测试还是性能压测,一套稳定、高效的自动化框架都至关重要。然而&am…...

如何通过LizzieYzy围棋AI分析工具在30天内实现棋力突破:从入门到实战的完整指南
如何通过LizzieYzy围棋AI分析工具在30天内实现棋力突破:从入门到实战的完整指南 【免费下载链接】lizzieyzy LizzieYzy - GUI for Game of Go 项目地址: https://gitcode.com/gh_mirrors/li/lizzieyzy 在围棋AI技术飞速发展的今天,LizzieYzy作为一…...

LTspice仿真波形图看不清?这4个隐藏操作技巧让你效率翻倍
LTspice波形分析进阶指南:4个被低估的高效操作技巧 当电路仿真结果呈现在眼前时,多数用户会本能地拖动鼠标进行粗略查看。但真正的高手知道,波形分析阶段的细微操作差异,往往决定了问题定位的效率与设计迭代的速度。本文将揭示那些…...