STM32超声波——HC_SR04
文章目录
- 一.超声波图片
- 二.时序图
- 三.超声波流程
- 四.单位换算
- 五.取余计算
- 六.换算距离
- 七.超声波代码
一.超声波图片
测量距离:2cm——400cm

二.时序图
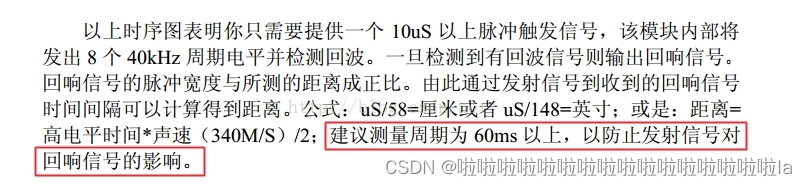
(1).以下时序图要先提供一个至少10us的脉冲触发信号,告诉单片机我准备好了,然后该超声波模块内部将发出8个40Khz的的周期电平并检测回波,这时候是超声波模块发送的波,检测能不能发送超声波,与单片机无关,所以代码就不用写写这里的代码,然后一旦检测到有回波信号后则向单片机输出回响信号,高电平持续的时间就是超声波发出波到返回的时间。
(2).以超声波为主体,Trig是接受触发信号RX,Echo是发送超声波TX。

三.超声波流程

四.单位换算

五.取余计算

六.换算距离
从下图手册可知,我们距离s可以等于时间微妙us/58,单位是cm,所以把定时器设置成1ms,在然后在定时器中断里面设置一个标志位,进去一次就是1ms,然后标志位在乘于一个1000,就是把1ms换算成1000us了,然后这个是来回的时间,但是要注意超声波回来的最后一刻,定时器没有达到ARR自动重装值的话,就结束了,这个也要算进去时间,就是TIM_GetCounter,然后t得到之后,t需要/2,因为是来回的时间,然后因为声速是340m/s,需要把us换成s,就是t * 0.00001/2=t/2000000,然后340m/s需要换成cm,也就是340 * 100,所以s=t/2000000 * 340 * 100,最后换算就是t/58。
七.超声波代码
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "Buzzer.h"
#include "OLED.h"float distance;int main()
{Ultrasonic_Init();OLED_Init();OLED_ShowString(1,1,"distance");OLED_ShowString(2,1,"000.000cm");while(1){distance=Ultrasonic_Getdistance();OLED_ShowNum(2,1,distance,3);//最多3位,因为最高测量4m,也就是400cmOLED_ShowNum(2,5,(uint16_t)(distance*1000)%1000,3);//小数也是3位,然后这里OLED_ShowNum是只显示整数,所以需要把float类型强转int类型Delay_ms(66);//周期至少60ms}
}Buzzer.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "Buzzer.h"uint32_t Ultrasonic_Num=0; // 计数值void Ultrasonic_Port()
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;//GPIOA0--RX--TrigGPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStructure);//GPIOA1---TX--EchoGPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(GPIOA,&GPIO_InitStructure);}void Ultrasonic_TIM(uint16_t arr,uint16_t psc)
{RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);TIM_TimeBaseInitTypeDef TIM_InitStructure;TIM_InitStructure.TIM_Period = arr-1;TIM_InitStructure.TIM_Prescaler = psc-1;TIM_InitStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_InitStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_InitStructure.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM3,&TIM_InitStructure);NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);NVIC_InitTypeDef NVIC_InitStructure;NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 8;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE);TIM_Cmd(TIM3, DISABLE);
}void Ultrasonic_Init()
{Ultrasonic_Port();Ultrasonic_TIM(1000,72);
}//触发超声波
void Ultrasonic_Start()
{INC = 1; Delay_us(12);//Trig给高电平12us INC = 0;
}//测量时间
int Ultrasonic_GetTime(void)
{uint32_t t;//1ms*1000=1000us,这里化成ust = Ultrasonic_Num * 1000; //t=t+TIM_GetCounter(TIM3),意思是:t是上面获取的定时器爆表后的时间,爆表一次就是1000us,也就是ARR为1000时就是1000us,当然如果超声波在下一次计时没有爆表就结束了,//假如此时CNT=900,那我们假如Ultrasonic_Num=1,就是1000us,然后t=1000+900=1900ust +=TIM_GetCounter(TIM3);return t;
}//测量距离
float Ultrasonic_Getdistance(void)
{int i =0;uint32_t t = 0;float distance = 0;float sum = 0;while(i!=5) //五次测量{Ultrasonic_Start(); //触发超声波TIM_SetCounter(TIM3,0);Ultrasonic_Num = 0; //定时器清0while(IN0 == 0);TIM_Cmd(TIM3,ENABLE); //启动定时器i++;while(IN0 == 1);TIM_Cmd(TIM3, DISABLE); //关闭定时器t = Ultrasonic_GetTime(); //获取时间distance =(float)t /58; //测量距离sum += distance; //五次测量总和}distance = (sum/5); //取平均值return distance;
}void TIM3_IRQHandler(void)//0.001s=1ms
{if(TIM_GetITStatus(TIM3,TIM_IT_Update) == SET){Ultrasonic_Num++; //计数值+1}TIM_ClearITPendingBit(TIM3,TIM_IT_Update);
}
Buzzer.h
#include "stm32f10x.h" // Device header
#include "sys.h"#ifndef __BUZZER_H
#define __BUZZER_H#define INC PAout(0)
#define IN0 PAin(1)void Ultrasonic_Init(void);
float Ultrasonic_Getdistance(void);#endifsys.c
sys.h
#ifndef __SYS_H
#define __SYS_H
#include "stm32f10x.h"//位带操作,实现51类似的GPIO控制功能
//具体实现思想,参考<<CM3权威指南>>第五章(87页~92页).
//IO口操作宏定义
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
//IO口地址映射
#define GPIOA_ODR_Addr (GPIOA_BASE+12) //0x4001080C
#define GPIOB_ODR_Addr (GPIOB_BASE+12) //0x40010C0C
#define GPIOC_ODR_Addr (GPIOC_BASE+12) //0x4001100C
#define GPIOD_ODR_Addr (GPIOD_BASE+12) //0x4001140C
#define GPIOE_ODR_Addr (GPIOE_BASE+12) //0x4001180C
#define GPIOF_ODR_Addr (GPIOF_BASE+12) //0x40011A0C
#define GPIOG_ODR_Addr (GPIOG_BASE+12) //0x40011E0C #define GPIOA_IDR_Addr (GPIOA_BASE+8) //0x40010808
#define GPIOB_IDR_Addr (GPIOB_BASE+8) //0x40010C08
#define GPIOC_IDR_Addr (GPIOC_BASE+8) //0x40011008
#define GPIOD_IDR_Addr (GPIOD_BASE+8) //0x40011408
#define GPIOE_IDR_Addr (GPIOE_BASE+8) //0x40011808
#define GPIOF_IDR_Addr (GPIOF_BASE+8) //0x40011A08
#define GPIOG_IDR_Addr (GPIOG_BASE+8) //0x40011E08 //IO口操作,只对单一的IO口!
//确保n的值小于16!
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //输出
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //输入 #define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n) //输出
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n) //输入 #define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n) //输出
#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n) //输入 #define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n) //输出
#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n) //输入 #define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n) //输出
#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n) //输入#define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入#define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n) //输出
#define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n) //输入#endifOLED.c
#include "stm32f10x.h"
#include "OLED_Font.h"/*引脚配置*/
#define OLED_W_SCL(x) GPIO_WriteBit(GPIOB, GPIO_Pin_12, (BitAction)(x))
#define OLED_W_SDA(x) GPIO_WriteBit(GPIOB, GPIO_Pin_13, (BitAction)(x))/*引脚初始化*/
void OLED_I2C_Init(void)
{GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;GPIO_Init(GPIOB, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;GPIO_Init(GPIOB, &GPIO_InitStructure);OLED_W_SCL(1);OLED_W_SDA(1);
}/*** @brief I2C开始* @param 无* @retval 无*/
void OLED_I2C_Start(void)
{OLED_W_SDA(1);OLED_W_SCL(1);OLED_W_SDA(0);OLED_W_SCL(0);
}/*** @brief I2C停止* @param 无* @retval 无*/
void OLED_I2C_Stop(void)
{OLED_W_SDA(0);OLED_W_SCL(1);OLED_W_SDA(1);
}/*** @brief I2C发送一个字节* @param Byte 要发送的一个字节* @retval 无*/
void OLED_I2C_SendByte(uint8_t Byte)
{uint8_t i;for (i = 0; i < 8; i++){OLED_W_SDA(Byte & (0x80 >> i));OLED_W_SCL(1);OLED_W_SCL(0);}OLED_W_SCL(1); //额外的一个时钟,不处理应答信号OLED_W_SCL(0);
}/*** @brief OLED写命令* @param Command 要写入的命令* @retval 无*/
void OLED_WriteCommand(uint8_t Command)
{OLED_I2C_Start();OLED_I2C_SendByte(0x78); //从机地址OLED_I2C_SendByte(0x00); //写命令OLED_I2C_SendByte(Command); OLED_I2C_Stop();
}/*** @brief OLED写数据* @param Data 要写入的数据* @retval 无*/
void OLED_WriteData(uint8_t Data)
{OLED_I2C_Start();OLED_I2C_SendByte(0x78); //从机地址OLED_I2C_SendByte(0x40); //写数据OLED_I2C_SendByte(Data);OLED_I2C_Stop();
}/*** @brief OLED设置光标位置* @param Y 以左上角为原点,向下方向的坐标,范围:0~7* @param X 以左上角为原点,向右方向的坐标,范围:0~127* @retval 无*/
void OLED_SetCursor(uint8_t Y, uint8_t X)
{OLED_WriteCommand(0xB0 | Y); //设置Y位置OLED_WriteCommand(0x10 | ((X & 0xF0) >> 4)); //设置X位置高4位OLED_WriteCommand(0x00 | (X & 0x0F)); //设置X位置低4位
}/*** @brief OLED清屏* @param 无* @retval 无*/
void OLED_Clear(void)
{ uint8_t i, j;for (j = 0; j < 8; j++){OLED_SetCursor(j, 0);for(i = 0; i < 128; i++){OLED_WriteData(0x00);}}
}/*** @brief OLED显示一个字符* @param Line 行位置,范围:1~4* @param Column 列位置,范围:1~16* @param Char 要显示的一个字符,范围:ASCII可见字符* @retval 无*/
void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char)
{ uint8_t i;OLED_SetCursor((Line - 1) * 2, (Column - 1) * 8); //设置光标位置在上半部分for (i = 0; i < 8; i++){OLED_WriteData(OLED_F8x16[Char - ' '][i]); //显示上半部分内容}OLED_SetCursor((Line - 1) * 2 + 1, (Column - 1) * 8); //设置光标位置在下半部分for (i = 0; i < 8; i++){OLED_WriteData(OLED_F8x16[Char - ' '][i + 8]); //显示下半部分内容}
}/*** @brief OLED显示字符串* @param Line 起始行位置,范围:1~4* @param Column 起始列位置,范围:1~16* @param String 要显示的字符串,范围:ASCII可见字符* @retval 无*/
void OLED_ShowString(uint8_t Line, uint8_t Column, char *String)
{uint8_t i;for (i = 0; String[i] != '\0'; i++){OLED_ShowChar(Line, Column + i, String[i]);}
}/*** @brief OLED次方函数* @retval 返回值等于X的Y次方*/
uint32_t OLED_Pow(uint32_t X, uint32_t Y)
{uint32_t Result = 1;while (Y--){Result *= X;}return Result;
}/*** @brief OLED显示数字(十进制,正数)* @param Line 起始行位置,范围:1~4* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~4294967295* @param Length 要显示数字的长度,范围:1~10* @retval 无*/
void OLED_ShowNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{uint8_t i;for (i = 0; i < Length; i++) {OLED_ShowChar(Line, Column + i, Number / OLED_Pow(10, Length - i - 1) % 10 + '0');}
}/*** @brief OLED显示数字(十进制,带符号数)* @param Line 起始行位置,范围:1~4* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:-2147483648~2147483647* @param Length 要显示数字的长度,范围:1~10* @retval 无*/
void OLED_ShowSignedNum(uint8_t Line, uint8_t Column, int32_t Number, uint8_t Length)
{uint8_t i;uint32_t Number1;if (Number >= 0){OLED_ShowChar(Line, Column, '+');Number1 = Number;}else{OLED_ShowChar(Line, Column, '-');Number1 = -Number;}for (i = 0; i < Length; i++) {OLED_ShowChar(Line, Column + i + 1, Number1 / OLED_Pow(10, Length - i - 1) % 10 + '0');}
}/*** @brief OLED显示数字(十六进制,正数)* @param Line 起始行位置,范围:1~4* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~0xFFFFFFFF* @param Length 要显示数字的长度,范围:1~8* @retval 无*/
void OLED_ShowHexNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{uint8_t i, SingleNumber;for (i = 0; i < Length; i++) {SingleNumber = Number / OLED_Pow(16, Length - i - 1) % 16;if (SingleNumber < 10){OLED_ShowChar(Line, Column + i, SingleNumber + '0');}else{OLED_ShowChar(Line, Column + i, SingleNumber - 10 + 'A');}}
}/*** @brief OLED显示数字(二进制,正数)* @param Line 起始行位置,范围:1~4* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~1111 1111 1111 1111* @param Length 要显示数字的长度,范围:1~16* @retval 无*/
void OLED_ShowBinNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length)
{uint8_t i;for (i = 0; i < Length; i++) {OLED_ShowChar(Line, Column + i, Number / OLED_Pow(2, Length - i - 1) % 2 + '0');}
}/*** @brief OLED初始化* @param 无* @retval 无*/
void OLED_Init(void)
{uint32_t i, j;for (i = 0; i < 1000; i++) //上电延时{for (j = 0; j < 1000; j++);}OLED_I2C_Init(); //端口初始化OLED_WriteCommand(0xAE); //关闭显示OLED_WriteCommand(0xD5); //设置显示时钟分频比/振荡器频率OLED_WriteCommand(0x80);OLED_WriteCommand(0xA8); //设置多路复用率OLED_WriteCommand(0x3F);OLED_WriteCommand(0xD3); //设置显示偏移OLED_WriteCommand(0x00);OLED_WriteCommand(0x40); //设置显示开始行OLED_WriteCommand(0xA1); //设置左右方向,0xA1正常 0xA0左右反置OLED_WriteCommand(0xC8); //设置上下方向,0xC8正常 0xC0上下反置OLED_WriteCommand(0xDA); //设置COM引脚硬件配置OLED_WriteCommand(0x12);OLED_WriteCommand(0x81); //设置对比度控制OLED_WriteCommand(0xCF);OLED_WriteCommand(0xD9); //设置预充电周期OLED_WriteCommand(0xF1);OLED_WriteCommand(0xDB); //设置VCOMH取消选择级别OLED_WriteCommand(0x30);OLED_WriteCommand(0xA4); //设置整个显示打开/关闭OLED_WriteCommand(0xA6); //设置正常/倒转显示OLED_WriteCommand(0x8D); //设置充电泵OLED_WriteCommand(0x14);OLED_WriteCommand(0xAF); //开启显示OLED_Clear(); //OLED清屏
}OLED.h
#ifndef __OLED_H
#define __OLED_H#include "stm32f10x.h" // Device headervoid OLED_Init(void);
void OLED_Clear(void);
void OLED_ShowChar(uint8_t Line, uint8_t Column, char Char);
void OLED_ShowString(uint8_t Line, uint8_t Column, char *String);
void OLED_ShowNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length);
void OLED_ShowSignedNum(uint8_t Line, uint8_t Column, int32_t Number, uint8_t Length);
void OLED_ShowHexNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length);
void OLED_ShowBinNum(uint8_t Line, uint8_t Column, uint32_t Number, uint8_t Length);#endifOLED_Font.h
#ifndef __OLED_FONT_H
#define __OLED_FONT_H#include "stm32f10x.h" // Device header/*OLED字模库,宽8像素,高16像素*/
const uint8_t OLED_F8x16[][16]=
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,// 00x00,0x00,0x00,0xF8,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x33,0x30,0x00,0x00,0x00,//! 10x00,0x10,0x0C,0x06,0x10,0x0C,0x06,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//" 20x40,0xC0,0x78,0x40,0xC0,0x78,0x40,0x00,0x04,0x3F,0x04,0x04,0x3F,0x04,0x04,0x00,//# 30x00,0x70,0x88,0xFC,0x08,0x30,0x00,0x00,0x00,0x18,0x20,0xFF,0x21,0x1E,0x00,0x00,//$ 40xF0,0x08,0xF0,0x00,0xE0,0x18,0x00,0x00,0x00,0x21,0x1C,0x03,0x1E,0x21,0x1E,0x00,//% 50x00,0xF0,0x08,0x88,0x70,0x00,0x00,0x00,0x1E,0x21,0x23,0x24,0x19,0x27,0x21,0x10,//& 60x10,0x16,0x0E,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//' 70x00,0x00,0x00,0xE0,0x18,0x04,0x02,0x00,0x00,0x00,0x00,0x07,0x18,0x20,0x40,0x00,//( 80x00,0x02,0x04,0x18,0xE0,0x00,0x00,0x00,0x00,0x40,0x20,0x18,0x07,0x00,0x00,0x00,//) 90x40,0x40,0x80,0xF0,0x80,0x40,0x40,0x00,0x02,0x02,0x01,0x0F,0x01,0x02,0x02,0x00,//* 100x00,0x00,0x00,0xF0,0x00,0x00,0x00,0x00,0x01,0x01,0x01,0x1F,0x01,0x01,0x01,0x00,//+ 110x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0xB0,0x70,0x00,0x00,0x00,0x00,0x00,//, 120x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x01,0x01,0x01,0x01,0x01,0x01,//- 130x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,0x00,0x00,//. 140x00,0x00,0x00,0x00,0x80,0x60,0x18,0x04,0x00,0x60,0x18,0x06,0x01,0x00,0x00,0x00,/// 150x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x0F,0x10,0x20,0x20,0x10,0x0F,0x00,//0 160x00,0x10,0x10,0xF8,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//1 170x00,0x70,0x08,0x08,0x08,0x88,0x70,0x00,0x00,0x30,0x28,0x24,0x22,0x21,0x30,0x00,//2 180x00,0x30,0x08,0x88,0x88,0x48,0x30,0x00,0x00,0x18,0x20,0x20,0x20,0x11,0x0E,0x00,//3 190x00,0x00,0xC0,0x20,0x10,0xF8,0x00,0x00,0x00,0x07,0x04,0x24,0x24,0x3F,0x24,0x00,//4 200x00,0xF8,0x08,0x88,0x88,0x08,0x08,0x00,0x00,0x19,0x21,0x20,0x20,0x11,0x0E,0x00,//5 210x00,0xE0,0x10,0x88,0x88,0x18,0x00,0x00,0x00,0x0F,0x11,0x20,0x20,0x11,0x0E,0x00,//6 220x00,0x38,0x08,0x08,0xC8,0x38,0x08,0x00,0x00,0x00,0x00,0x3F,0x00,0x00,0x00,0x00,//7 230x00,0x70,0x88,0x08,0x08,0x88,0x70,0x00,0x00,0x1C,0x22,0x21,0x21,0x22,0x1C,0x00,//8 240x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x00,0x31,0x22,0x22,0x11,0x0F,0x00,//9 250x00,0x00,0x00,0xC0,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,//: 260x00,0x00,0x00,0x80,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0x60,0x00,0x00,0x00,0x00,//; 270x00,0x00,0x80,0x40,0x20,0x10,0x08,0x00,0x00,0x01,0x02,0x04,0x08,0x10,0x20,0x00,//< 280x40,0x40,0x40,0x40,0x40,0x40,0x40,0x00,0x04,0x04,0x04,0x04,0x04,0x04,0x04,0x00,//= 290x00,0x08,0x10,0x20,0x40,0x80,0x00,0x00,0x00,0x20,0x10,0x08,0x04,0x02,0x01,0x00,//> 300x00,0x70,0x48,0x08,0x08,0x08,0xF0,0x00,0x00,0x00,0x00,0x30,0x36,0x01,0x00,0x00,//? 310xC0,0x30,0xC8,0x28,0xE8,0x10,0xE0,0x00,0x07,0x18,0x27,0x24,0x23,0x14,0x0B,0x00,//@ 320x00,0x00,0xC0,0x38,0xE0,0x00,0x00,0x00,0x20,0x3C,0x23,0x02,0x02,0x27,0x38,0x20,//A 330x08,0xF8,0x88,0x88,0x88,0x70,0x00,0x00,0x20,0x3F,0x20,0x20,0x20,0x11,0x0E,0x00,//B 340xC0,0x30,0x08,0x08,0x08,0x08,0x38,0x00,0x07,0x18,0x20,0x20,0x20,0x10,0x08,0x00,//C 350x08,0xF8,0x08,0x08,0x08,0x10,0xE0,0x00,0x20,0x3F,0x20,0x20,0x20,0x10,0x0F,0x00,//D 360x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,0x20,0x3F,0x20,0x20,0x23,0x20,0x18,0x00,//E 370x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,0x20,0x3F,0x20,0x00,0x03,0x00,0x00,0x00,//F 380xC0,0x30,0x08,0x08,0x08,0x38,0x00,0x00,0x07,0x18,0x20,0x20,0x22,0x1E,0x02,0x00,//G 390x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,0x20,0x3F,0x21,0x01,0x01,0x21,0x3F,0x20,//H 400x00,0x08,0x08,0xF8,0x08,0x08,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//I 410x00,0x00,0x08,0x08,0xF8,0x08,0x08,0x00,0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,0x00,//J 420x08,0xF8,0x88,0xC0,0x28,0x18,0x08,0x00,0x20,0x3F,0x20,0x01,0x26,0x38,0x20,0x00,//K 430x08,0xF8,0x08,0x00,0x00,0x00,0x00,0x00,0x20,0x3F,0x20,0x20,0x20,0x20,0x30,0x00,//L 440x08,0xF8,0xF8,0x00,0xF8,0xF8,0x08,0x00,0x20,0x3F,0x00,0x3F,0x00,0x3F,0x20,0x00,//M 450x08,0xF8,0x30,0xC0,0x00,0x08,0xF8,0x08,0x20,0x3F,0x20,0x00,0x07,0x18,0x3F,0x00,//N 460xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,0x0F,0x10,0x20,0x20,0x20,0x10,0x0F,0x00,//O 470x08,0xF8,0x08,0x08,0x08,0x08,0xF0,0x00,0x20,0x3F,0x21,0x01,0x01,0x01,0x00,0x00,//P 480xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,0x0F,0x18,0x24,0x24,0x38,0x50,0x4F,0x00,//Q 490x08,0xF8,0x88,0x88,0x88,0x88,0x70,0x00,0x20,0x3F,0x20,0x00,0x03,0x0C,0x30,0x20,//R 500x00,0x70,0x88,0x08,0x08,0x08,0x38,0x00,0x00,0x38,0x20,0x21,0x21,0x22,0x1C,0x00,//S 510x18,0x08,0x08,0xF8,0x08,0x08,0x18,0x00,0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//T 520x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//U 530x08,0x78,0x88,0x00,0x00,0xC8,0x38,0x08,0x00,0x00,0x07,0x38,0x0E,0x01,0x00,0x00,//V 540xF8,0x08,0x00,0xF8,0x00,0x08,0xF8,0x00,0x03,0x3C,0x07,0x00,0x07,0x3C,0x03,0x00,//W 550x08,0x18,0x68,0x80,0x80,0x68,0x18,0x08,0x20,0x30,0x2C,0x03,0x03,0x2C,0x30,0x20,//X 560x08,0x38,0xC8,0x00,0xC8,0x38,0x08,0x00,0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//Y 570x10,0x08,0x08,0x08,0xC8,0x38,0x08,0x00,0x20,0x38,0x26,0x21,0x20,0x20,0x18,0x00,//Z 580x00,0x00,0x00,0xFE,0x02,0x02,0x02,0x00,0x00,0x00,0x00,0x7F,0x40,0x40,0x40,0x00,//[ 590x00,0x0C,0x30,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x06,0x38,0xC0,0x00,//\ 600x00,0x02,0x02,0x02,0xFE,0x00,0x00,0x00,0x00,0x40,0x40,0x40,0x7F,0x00,0x00,0x00,//] 610x00,0x00,0x04,0x02,0x02,0x02,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//^ 620x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x80,//_ 630x00,0x02,0x02,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//` 640x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x19,0x24,0x22,0x22,0x22,0x3F,0x20,//a 650x08,0xF8,0x00,0x80,0x80,0x00,0x00,0x00,0x00,0x3F,0x11,0x20,0x20,0x11,0x0E,0x00,//b 660x00,0x00,0x00,0x80,0x80,0x80,0x00,0x00,0x00,0x0E,0x11,0x20,0x20,0x20,0x11,0x00,//c 670x00,0x00,0x00,0x80,0x80,0x88,0xF8,0x00,0x00,0x0E,0x11,0x20,0x20,0x10,0x3F,0x20,//d 680x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x1F,0x22,0x22,0x22,0x22,0x13,0x00,//e 690x00,0x80,0x80,0xF0,0x88,0x88,0x88,0x18,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//f 700x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x6B,0x94,0x94,0x94,0x93,0x60,0x00,//g 710x08,0xF8,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//h 720x00,0x80,0x98,0x98,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//i 730x00,0x00,0x00,0x80,0x98,0x98,0x00,0x00,0x00,0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,//j 740x08,0xF8,0x00,0x00,0x80,0x80,0x80,0x00,0x20,0x3F,0x24,0x02,0x2D,0x30,0x20,0x00,//k 750x00,0x08,0x08,0xF8,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//l 760x80,0x80,0x80,0x80,0x80,0x80,0x80,0x00,0x20,0x3F,0x20,0x00,0x3F,0x20,0x00,0x3F,//m 770x80,0x80,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//n 780x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//o 790x80,0x80,0x00,0x80,0x80,0x00,0x00,0x00,0x80,0xFF,0xA1,0x20,0x20,0x11,0x0E,0x00,//p 800x00,0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x0E,0x11,0x20,0x20,0xA0,0xFF,0x80,//q 810x80,0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x20,0x20,0x3F,0x21,0x20,0x00,0x01,0x00,//r 820x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x33,0x24,0x24,0x24,0x24,0x19,0x00,//s 830x00,0x80,0x80,0xE0,0x80,0x80,0x00,0x00,0x00,0x00,0x00,0x1F,0x20,0x20,0x00,0x00,//t 840x80,0x80,0x00,0x00,0x00,0x80,0x80,0x00,0x00,0x1F,0x20,0x20,0x20,0x10,0x3F,0x20,//u 850x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,0x00,0x01,0x0E,0x30,0x08,0x06,0x01,0x00,//v 860x80,0x80,0x00,0x80,0x00,0x80,0x80,0x80,0x0F,0x30,0x0C,0x03,0x0C,0x30,0x0F,0x00,//w 870x00,0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x31,0x2E,0x0E,0x31,0x20,0x00,//x 880x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,0x80,0x81,0x8E,0x70,0x18,0x06,0x01,0x00,//y 890x00,0x80,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x21,0x30,0x2C,0x22,0x21,0x30,0x00,//z 900x00,0x00,0x00,0x00,0x80,0x7C,0x02,0x02,0x00,0x00,0x00,0x00,0x00,0x3F,0x40,0x40,//{ 910x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,//| 920x00,0x02,0x02,0x7C,0x80,0x00,0x00,0x00,0x00,0x40,0x40,0x3F,0x00,0x00,0x00,0x00,//} 930x00,0x06,0x01,0x01,0x02,0x02,0x04,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//~ 94
};#endif相关文章:
STM32超声波——HC_SR04
文章目录 一.超声波图片二.时序图三.超声波流程四.单位换算五.取余计算六.换算距离七.超声波代码 一.超声波图片 测量距离:2cm——400cm 二.时序图 (1).以下时序图要先提供一个至少10us的脉冲触发信号,告诉单片机我准备好了,然后该超声波…...
[Excel] vlookup函数
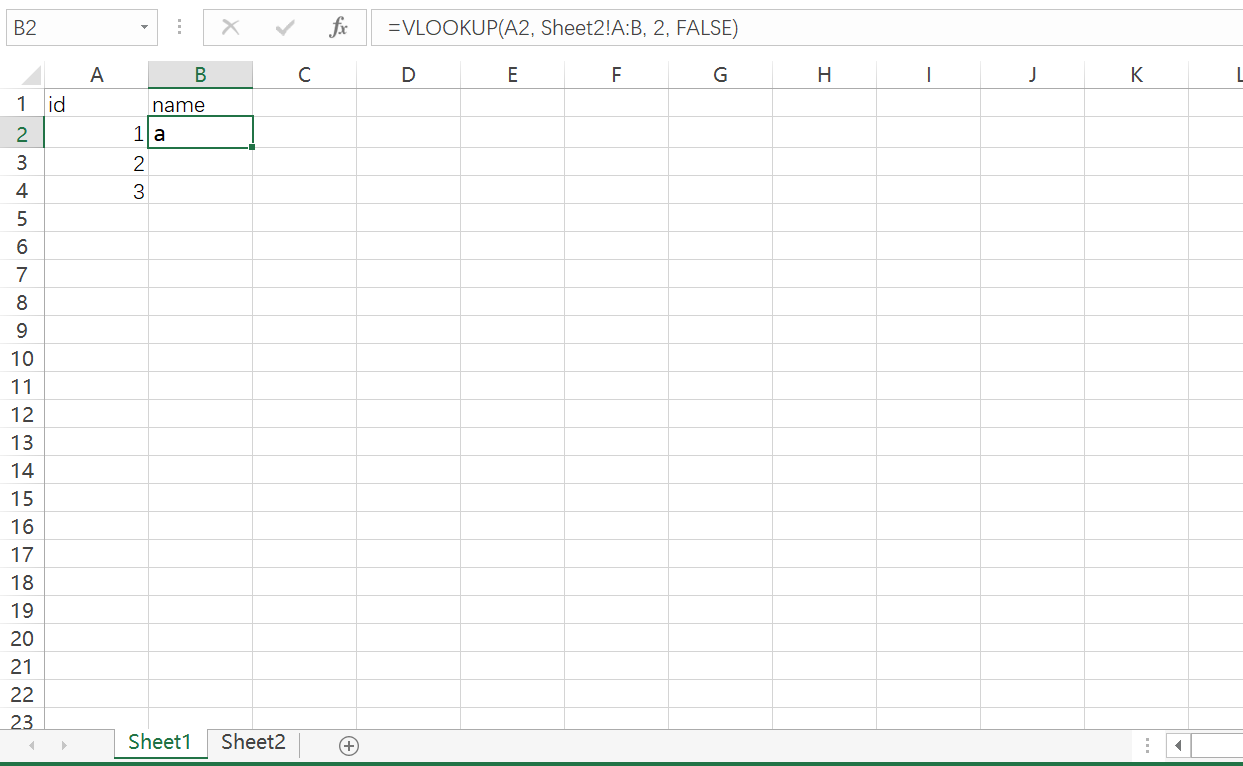
VLOOKUP用法 VLOOKUP(lookup_value, table_array, col_index_num, [range_lookup])其中: lookup_value是你要查找的值table_array是你要在其中进行查找的表格区域col_index_num是你要返回的在table_array中列索引号range_lookup是一个可选参数,用于指定…...
)
Python入门第5篇(爬虫相关)
目录 爬虫初步说明 html相关基础 urllib之读取网页内容 http相关基础 requests之webapi调用 爬虫初步说明 爬虫,一句话来说,即模拟浏览器爬取一些内容,如自动下载音乐、电影、图片这种的 具体可能是直接访问网页进行解析,也…...
单元测试二(实验)-云计算2023.12-云南农业大学
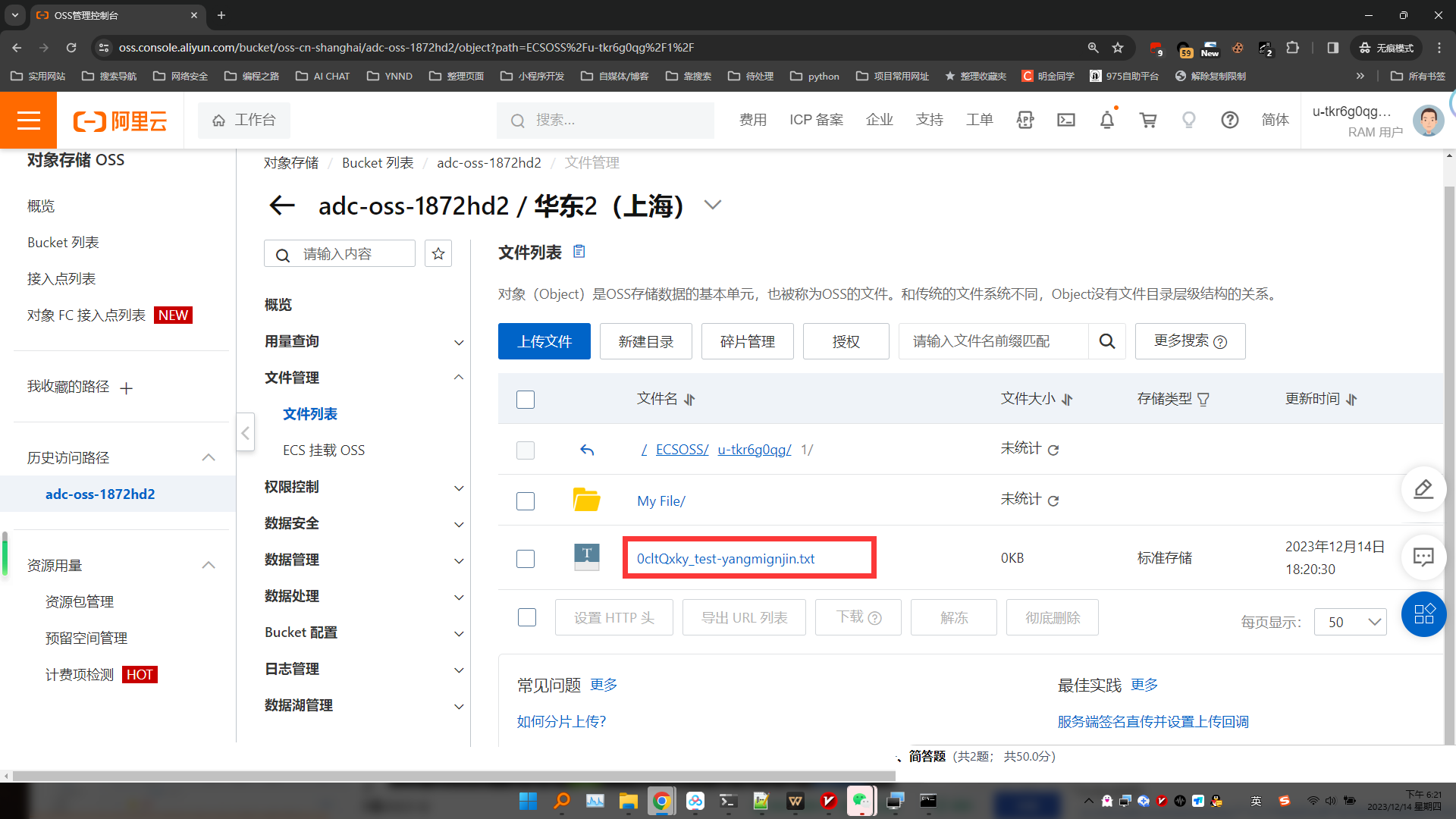
1、实践系列课《深入浅出Docker应用》 https://developeraliyun.com/adc/scenarioSeries/713c370e605e4f1fa7be903b80a53556?spma2c6h.27088027.devcloud-scenarioSeriesList.13.5bb75b8aZHOM2w 容器镜像的制作实验要求 创建Dockerfile文件: FROM ubuntu:latest WORKDIR data…...
Axure动态面板的使用以及示例分享
目录 一. 什么是动态面板 二. 动态面板教程——以轮播图为例 2.1 创建动态面板 2.2 动态面板自适应大小 2.3 重复状态,将图片导入 2.4 添加交互事件——图片切换 2.5 效果展示 三. 多方式登录示例展示 四. 后台主界面左侧菜单栏示例展示 一. 什么是动态面板…...
容斥原理的并
文章目录 简介AcWing 890. 能被整除的数思路解析CODE 简介 推荐题解:https://www.acwing.com/solution/content/126553/ 画了图,清晰易懂,懒得打字了。 总之就是以下公式: S S 1 S 2 S 3 − S 1 ∩ S 2 − S 1 ∩ S 3 − S 2 …...
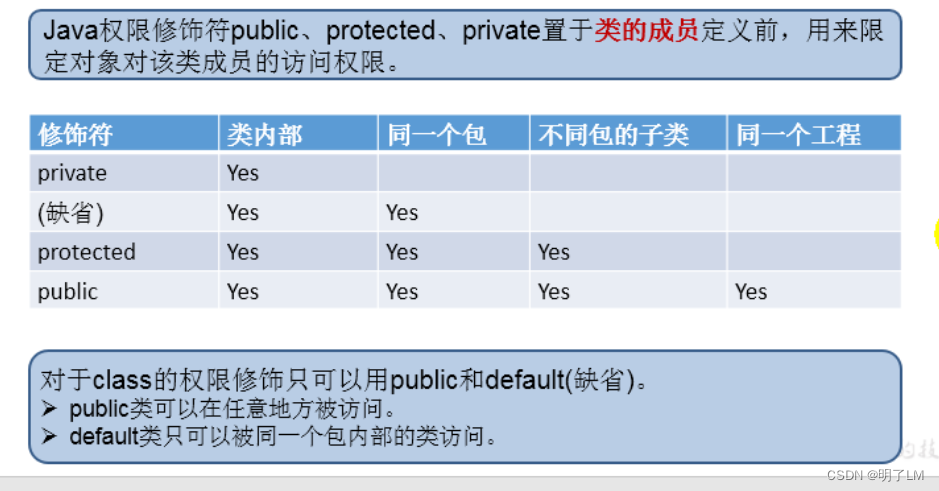
JavaSE第7篇:封装
文章目录 一、封装1、好处:2、使用 二、四种权限修饰符三、构造器1、作用2、说明3、属性赋值的过程 一、封装 封装就是将类的属性私有化,提供公有的方法访问私有属性 不对外暴露打的私有的方法 单例模式 1、好处: 1.只能通过规定的方法来访问数据 2.隐藏类的实例细节,方便…...

mysql数据库相关知识【MYSQL】
mysql数据库相关知识【MYSQL】 一. 库1.1 登录数据库管理系统1.2 什么是数据库1.2.1 mysqld与mysql 1.3 编码集和校验集1.3.1 什么是编码集和校验集1.3.2 查看库对应的编码集和校验集1.3.3 用指定的编码集和校验集 1.4 库的操作 一. 库 1.1 登录数据库管理系统 这个算是第一个…...
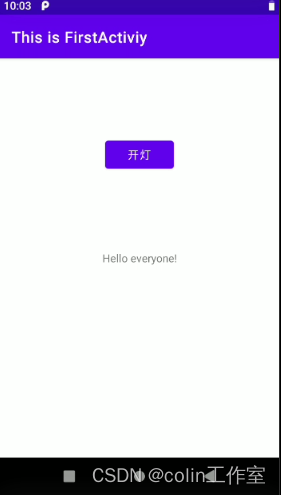
android studio 创建按钮项目
1)、新建一个empty activity项目,切换到project视图: 2)、修改app\src\main\res\layout\activity_main.xml文件,修改后如下: <?xml version"1.0" encoding"utf-8"?> <andr…...
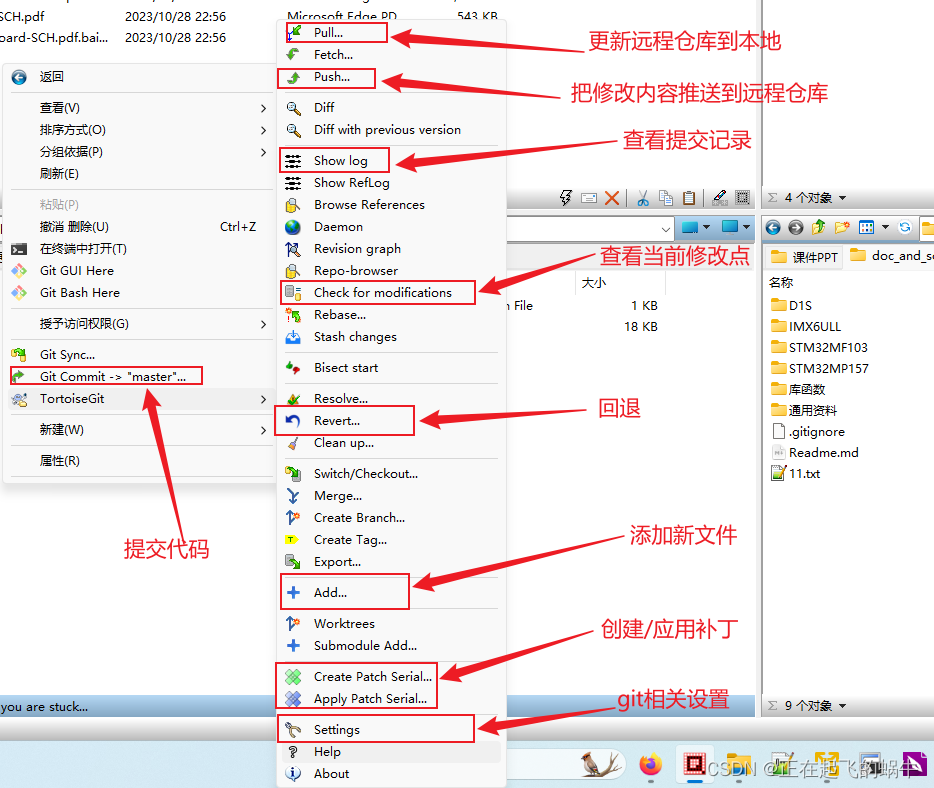
gitee提交代码步骤介绍(含git环境搭建)
1、gitee官网地址 https://gitee.com; 2、Windows中安装git环境 参考博客:《Windows中安装Git软件和TortoiseGit软件》; 3、设置用户名和密码 这里的用户名和密码就是登录gitee网站的用户名和密码如果设置错误,可以在Windows系统的“凭据管理…...
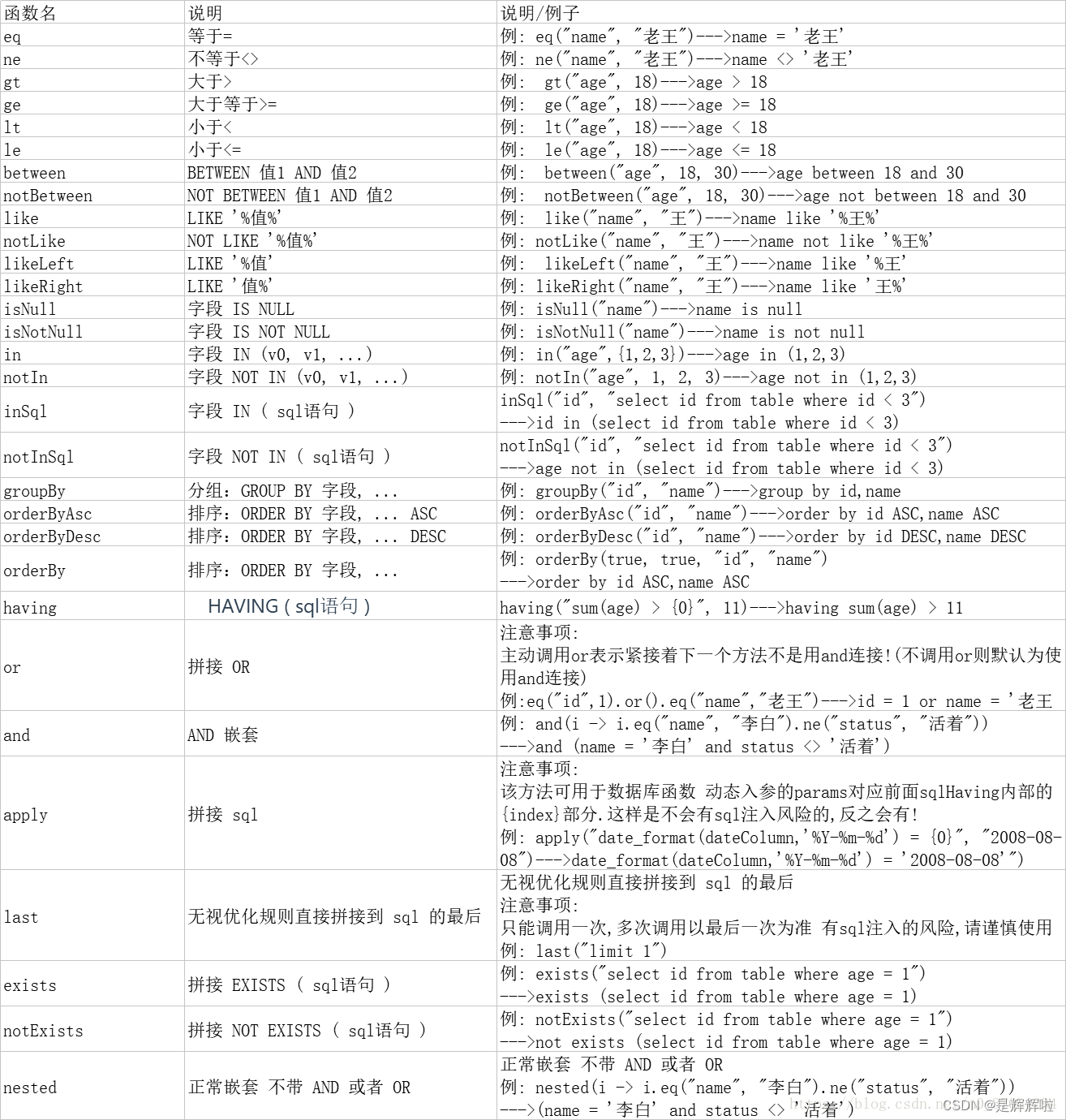
【MyBatis-Plus】常用的插件介绍(乐观锁、逻辑删除、分页)
🥳🥳Welcome Huihuis Code World ! !🥳🥳 接下来看看由辉辉所写的关于MyBatis-Plus的相关操作吧 目录 🥳🥳Welcome Huihuis Code World ! !🥳🥳 一.为什么要使用MyBatis-Plus中的插…...
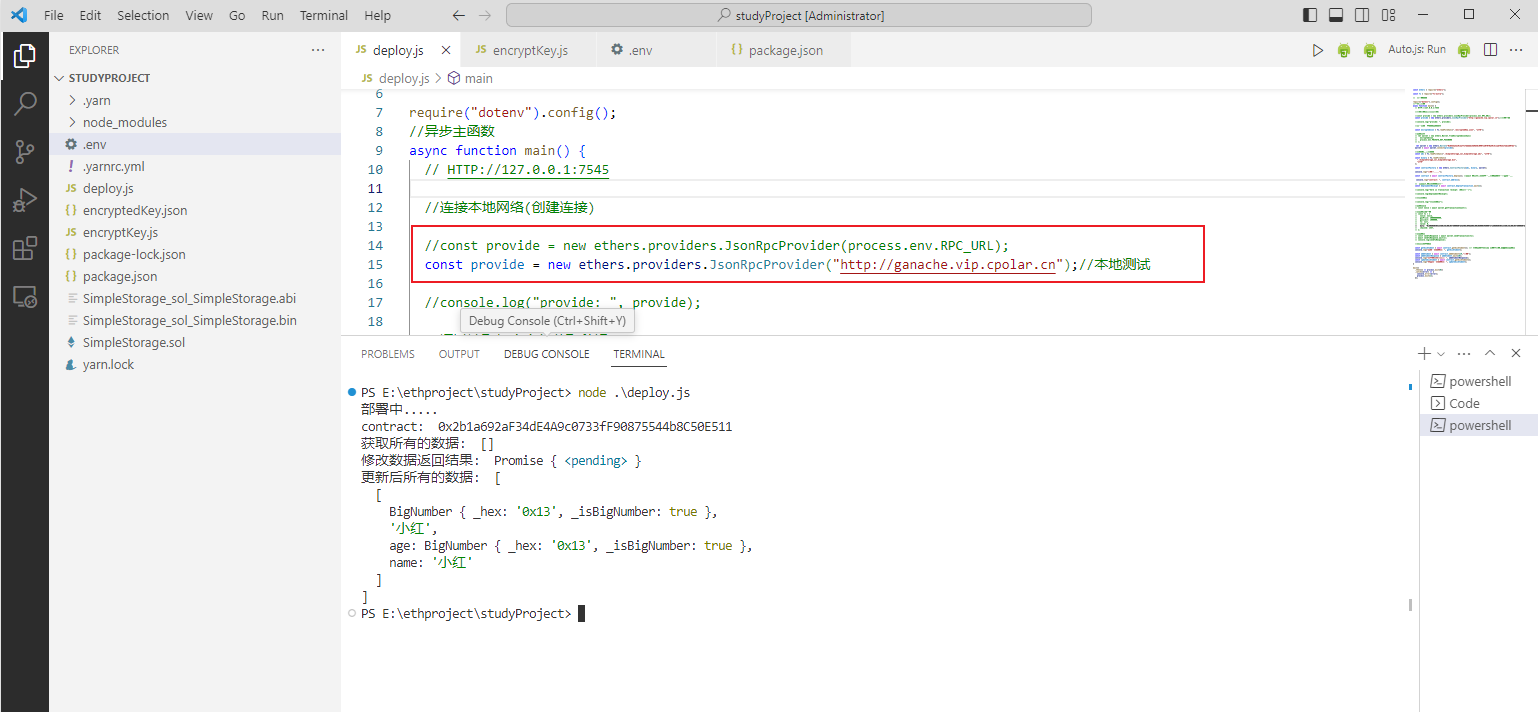
DApp测试网络Ganache本地部署并实现远程连接
文章目录 前言1. 安装Ganache2. 安装cpolar3. 创建公网地址4. 公网访问连接5. 固定公网地址 前言 Ganache 是DApp的测试网络,提供图形化界面,log日志等;智能合约部署时需要连接测试网络。 Ganache 是一个运行在本地测试的网络,通过结合cpol…...

好用的硬盘分区工具,傲梅分区助手 V10.2
傲梅分区助手软件可以帮助用户在硬盘上创建、调整、合并、删除分区,以及管理磁盘空间等操作。它可以帮助你进行硬盘无损分区操作。 支持系统 目前这款软件支持 Windows 7、Windows 8、Windows 10、Windows 11 等个人系统,还支持 Windows 2012/2016/2019…...

【华为鸿蒙系统学习】- HarmonyOS4.0开发|自学篇
🌈个人主页: Aileen_0v0 🔥热门专栏: 华为鸿蒙系统学习|计算机网络|数据结构与算法 💫个人格言:"没有罗马,那就自己创造罗马~" 目录 HarmonyOS 4.0 技术介绍: HarmonyOS三大特征: 1.实现硬件互助&#…...
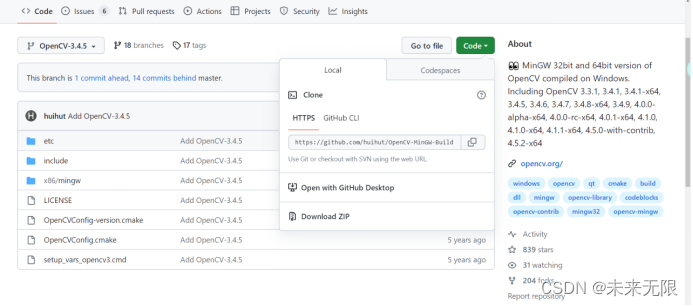
Qt图像处理-Qt中配置OpenCV打开本地图片
本文讲解Qt中配置OpenCV过程并用实例展示如何使用OpenCV打开图片(windows环境下) 一、下载OpenCv 本文使用版本OpenCV-MinGW-Build-OpenCV-3.4.5 下载地址: https://codeload.github.com/huihut/OpenCV-MinGW-Build/zip/refs/heads/OpenCV-3.4.5 点击Code-local-Downlo…...

HTML中RGB颜色表示法和RGBA颜色表示法
Hi i,m JinXiang ⭐ 前言 ⭐ 本篇文章主要介绍HTML中RGB颜色表示法和RGBA颜色表示法以及部分理论知识 🍉欢迎点赞 👍 收藏 ⭐留言评论 📝私信必回哟😁 🍉博主收将持续更新学习记录获,友友们有任何问题可以…...
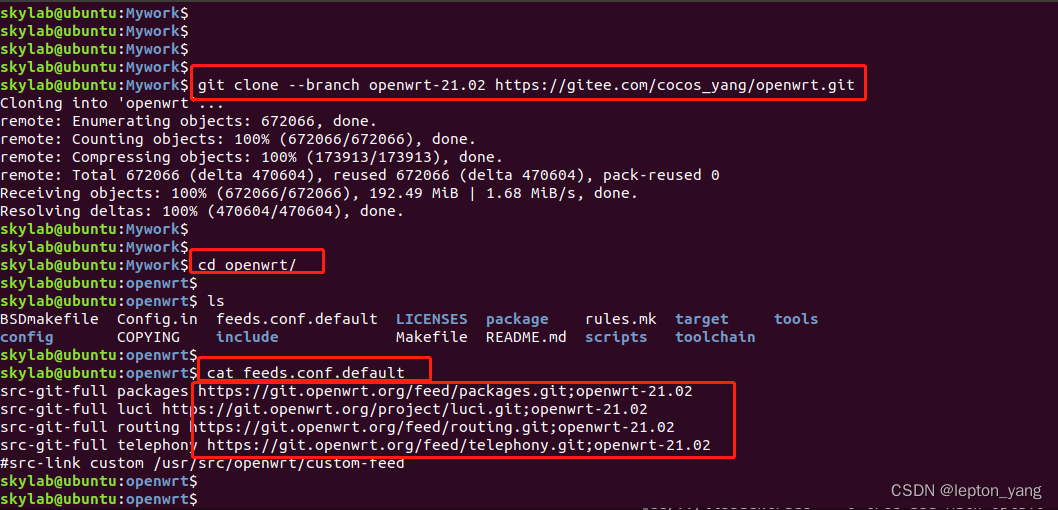
Openwrt源码下载出现“The remote end hung up unexpected”
最近项目原因需要下载openwrt21.02版本源码,花费了很多时间,找到正确方法后,发现可以节省很多时间,记录下过程,方便自己,可能方便他人。 一.问题阐述 openwrt21.02下载链接如下: git clone -…...
Cron表达式方案实例详解)
Spring定时任务动态更改(增、删、改)Cron表达式方案实例详解
Spring定时任务动态更改(增、删、改)Cron表达式方案实例详解 最近在做一个需求,用户可以在平台上配置任务计划数据(就是任务的执行和描述的相关信息,包括任务参数、cron表达式),配置后…...

常用登录加密之Shiro与Spring Security的使用对比
Shiro与Spring Security都是主流的身份认证和权限控制安全框架,Shiro偏向于前后端不分离平台,而Spring Security更偏向于前后端分离平台。接下来简单列一下两种登录验证的执行流程和示例,了解实际运用中的登录执行流程,然后重点剖…...
)
获取文件路径里的文件名(不包含扩展名)
“./abc/abc/llf.jpg” 写一个代码,让我获得“llf”这段字符串 import osfile_path "./abc/abc/llf.jpg" file_name os.path.splitext(os.path.basename(file_path))[0] print(file_name)在这个代码中,我们使用了os.path模块来处理文件路径…...

OpenRGB终极指南:一站式免费控制所有RGB设备的完整解决方案
OpenRGB终极指南:一站式免费控制所有RGB设备的完整解决方案 【免费下载链接】OpenRGB Open source RGB lighting control that doesnt depend on manufacturer software. Supports Windows, Linux, MacOS. Mirror of https://gitlab.com/CalcProgrammer1/OpenRGB. R…...

除了卸载浏览器,ADB还能帮你清理哪些OPPO手机预装软件?附完整包名清单
深度优化OPPO手机:ADB卸载非必要预装应用全指南 对于追求系统纯净度的OPPO手机用户而言,预装应用往往占据宝贵存储空间并消耗后台资源。本文将系统介绍如何利用Android Debug Bridge(ADB)工具精准管理ColorOS系统中的各类预装组件…...

如何用BilibiliDown实现跨平台B站视频高效下载?3个核心优势解析
如何用BilibiliDown实现跨平台B站视频高效下载?3个核心优势解析 【免费下载链接】BilibiliDown (GUI-多平台支持) B站 哔哩哔哩 视频下载器。支持稍后再看、收藏夹、UP主视频批量下载|Bilibili Video Downloader 😳 项目地址: https://gitcode.com/gh_…...

突破性创新:Midscene.js如何用AI视觉驱动重塑跨平台自动化测试
突破性创新:Midscene.js如何用AI视觉驱动重塑跨平台自动化测试 【免费下载链接】midscene AI-powered, vision-driven UI automation for every platform. 项目地址: https://gitcode.com/GitHub_Trending/mid/midscene 在当今复杂的软件生态中,跨…...

3大高级功能揭秘:用Python玩转B站API的终极指南
3大高级功能揭秘:用Python玩转B站API的终极指南 【免费下载链接】bilibili-api 哔哩哔哩常用API调用。支持视频、番剧、用户、频道、音频等功能。原仓库地址:https://github.com/MoyuScript/bilibili-api 项目地址: https://gitcode.com/gh_mirrors/bi…...

手把手教你用YOLOv5训练VisDrone2019数据集:搞定无人机航拍小目标检测
无人机视角下的目标检测实战:YOLOv5与VisDrone2019数据集深度适配指南 无人机航拍图像的目标检测一直是计算机视觉领域的难点与热点。VisDrone2019作为当前最权威的无人机视角数据集之一,包含了丰富的场景变化和极具挑战性的小目标检测任务。本文将带您从…...

如何快速掌握AMD Ryzen硬件调试:SMUDebugTool性能优化完整指南
如何快速掌握AMD Ryzen硬件调试:SMUDebugTool性能优化完整指南 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: ht…...

在微服务架构中统一接入Taotoken管理所有AI调用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在微服务架构中统一接入Taotoken管理所有AI调用 当企业采用微服务架构时,AI能力的调用往往分散在各个独立的服务中。每…...

BilibiliDown:三步搞定B站无损音频提取,构建你的专属音乐库
BilibiliDown:三步搞定B站无损音频提取,构建你的专属音乐库 【免费下载链接】BilibiliDown (GUI-多平台支持) B站 哔哩哔哩 视频下载器。支持稍后再看、收藏夹、UP主视频批量下载|Bilibili Video Downloader 😳 项目地址: https://gitcode.…...

别只盯着原理图:聊聊Cadence Virtuoso里带隙基准的版图匹配那些坑
带隙基准版图匹配实战:从原理图到后仿真的关键陷阱解析 当你在Cadence Virtuoso中完成了一个温漂仅2.6ppm的带隙基准电路设计,原理图仿真结果堪称完美——直到你开始画版图。这时你会发现,那些在原理图中对称排列的晶体管,在实际硅…...