代码随想Day39 | 62.不同路径、63. 不同路径 II
62.不同路径
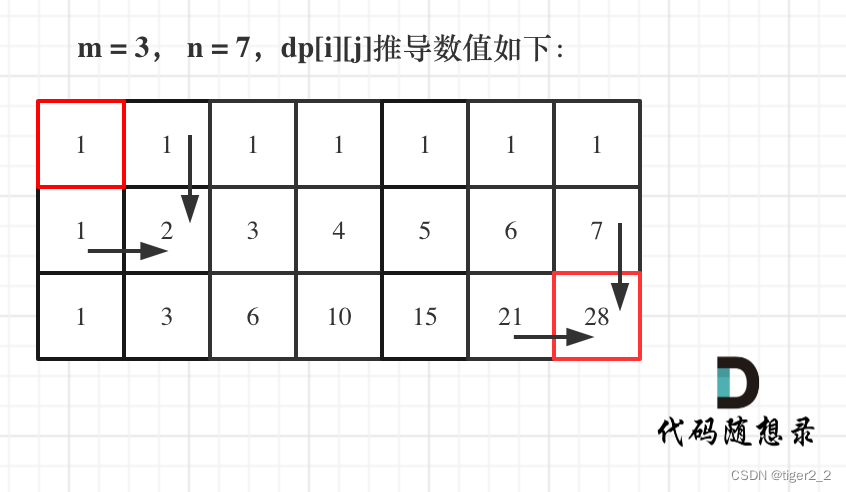
每次向右或者向下走两个选择,定义dp数组dp[i][j] 为到达索引ij的路径和,状态转移公式为
dp[i][j]=dp[i-1][j]+dp[i][j-1],初始状态的第一行和第一列为1,从左上到右下开始遍历即可。详细代码如下:
class Solution {
public:int uniquePaths(int m, int n) {vector<vector<int>>dp (m,vector<int>(n,1));for(int i=1;i<m;i++){for(int j=1;j<n;j++){dp[i][j] = dp[i-1][j]+dp[i][j-1];}}return dp[m-1][n-1];}
};为了优化空间复杂度,可以用一个一维数组,因为一定是先更新左边的值再更新右边的值。
详细代码如下:
class Solution {
public:int uniquePaths(int m, int n) {vector<int>dp (n,1);for(int i=1;i<m;i++){for(int j=1;j<n;j++){dp[j]+=dp[j-1]; //当前dp为从上方路径来,dp[j-1]为从左方来}}return dp[n-1];}
};63. 不同路径 II
这道题和上一道思路一样,但是这道有障碍物,需要注意有障碍物的索引,到达该处的路径和为0,根据这个条件,增加处理逻辑即可,整体的转移方程还是
详细代码如下:
class Solution {
public:int uniquePathsWithObstacles(vector<vector<int>>& obstacleGrid) {if(obstacleGrid.empty()) return 0;vector<vector<int>>dp(obstacleGrid.size(),vector<int>(obstacleGrid[0].size(),0));int m = obstacleGrid.size();int n = obstacleGrid[0].size();for(int i=0;i<m;i++){if(obstacleGrid[i][0]==1||i>0&&dp[i-1][0]==0) dp[i][0]=0;else dp[i][0] = 1;}for(int j=1;j<n;j++){if(obstacleGrid[0][j]==1||dp[0][j-1]==0) dp[0][j]=0;else dp[0][j] = 1;}for(int i=1;i<m;i++){for(int j=1;j<n;j++){if(obstacleGrid[i][j]==1) dp[i][j]=0;else dp[i][j] = dp[i-1][j]+dp[i][j-1];}}return dp[m-1][n-1];}
};感觉这道题的优化空间版本细节有点多,但还是附上代码:
class Solution {
public:int uniquePathsWithObstacles(vector<vector<int>>& obstacleGrid) {if(obstacleGrid.empty()) return 0;int m = obstacleGrid.size();int n = obstacleGrid[0].size();vector<int>dp (n,0);for(int j=0;j<n;j++){if(obstacleGrid[0][j]==1||j>0&&dp[j-1]==0) dp[j]=0;else dp[j] = 1;}for(int i=1;i<m;i++){for(int j=0;j<n;j++){if(obstacleGrid[i][j]==1) dp[j]=0;else if(j>0) dp[j] = dp[j]+dp[j-1];}}return dp[n-1];}
};相关文章:
代码随想Day39 | 62.不同路径、63. 不同路径 II
62.不同路径 每次向右或者向下走两个选择,定义dp数组dp[i][j] 为到达索引ij的路径和,状态转移公式为 dp[i][j]dp[i-1][j]dp[i][j-1],初始状态的第一行和第一列为1,从左上到右下开始遍历即可。详细代码如下: class Sol…...
)
Autosar通信实战系列07-Com模块要点及其配置介绍(二)
本文框架 前言1. ComGeneral配置2. ComConfig配置2.1 ComGwMapping2.2 ComIPdus2.3 ComIPduGroups2.4 ComIPduSignals2.5 ComIPduSignalGroups2.6 ComTimeBasis前言 在本系列笔者将结合工作中对通信实战部分的应用经验进一步介绍常用,包括但不限于通信各模块的开发教程,代码…...
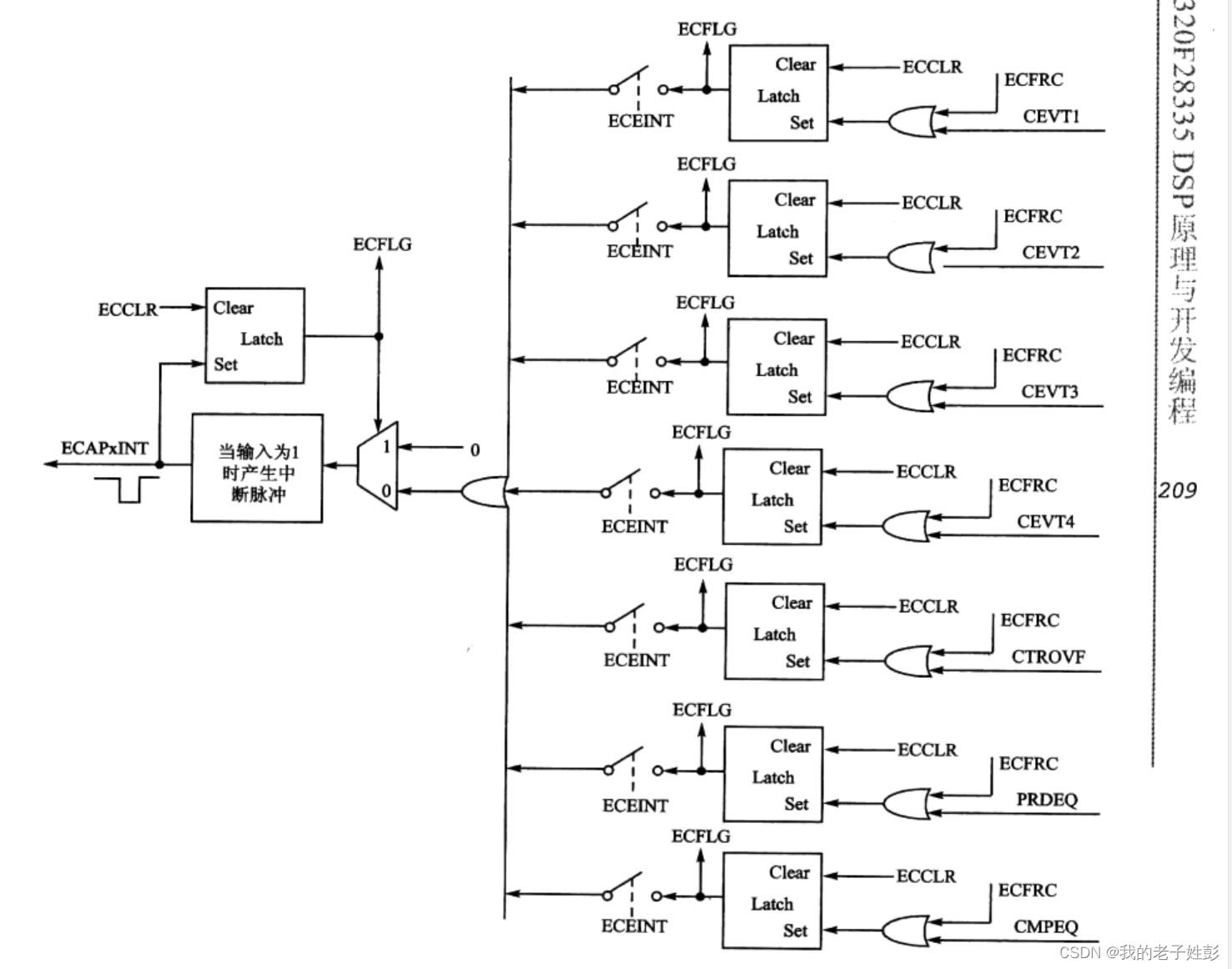
DSP捕获输入简单笔记
之前使用stm32的大概原理是: 输入引脚输入一个脉冲,捕获1开始极性捕获,捕获的是从启动捕获功能开始计数,捕获的是当前的计数值; 例如一个脉冲,捕获1捕获上升沿,捕获2捕获下降沿;而两…...

【Java基础】HashMap 原理
文章目录 1、HashMap 设置值的原理2、HashMap 获取值原理3、HashMap Hash优化4、HashMap 寻址优化5、HashMap 是如何解决Hash冲突的?5.1 get数据的时候,如果定位到指定位置的元素是一个链表,怎么办呢?5.2 红黑树 6、数组扩容6.1 数…...
vue3的大致使用
<template><div class"login_wrap"><div class"form_wrap"> <!-- 账号输入--> <el-form ref"formRef" :model"user" class"demo-dynamic" > <!--prop要跟属性名称对应-->…...

什么是计算机网络?计算机网络基础知识
1.网络的组成部分:由主机,路由器,交换机等组成 2.网络结构:网络的网络 3.信息交换方式:电路交换和分组交换 4.网络分层:分清职责,物理层,链路层,网络层,运…...

【机器学习 | 假设检验系列】假设检验系列—卡方检验(详细案例,数学公式原理推导),最常被忽视得假设检验确定不来看看?
🤵♂️ 个人主页: AI_magician 📡主页地址: 作者简介:CSDN内容合伙人,全栈领域优质创作者。 👨💻景愿:旨在于能和更多的热爱计算机的伙伴一起成长!!&…...

RealBasicVSR高清处理视频
autodl做了镜像:高清RealBasicVSR 首先在剪映将视频剪好导出,最多是720像素的,不然后面超分的时候会爆显存。剪映视频也最好是双数帧数结尾的,不然超分的时候单数图片会报错->RuntimeError: non-empty 3D or 4D input tensor …...

晚期食管癌肿瘤治疗线程分类
文章目录 1、肿瘤治疗的线数1.1 基础概念1.2 线程定义1.3 如何计算治疗线数 2 食管癌治疗指南2.1 食管癌诊疗指南2.1 CSCO 本文前半部分主要来源于参考文件1,其余部分来源于官方指南。无原创内容,全部为摘要。 1、肿瘤治疗的线数 1.1 基础概念 抗肿瘤药…...

高效营销系统集成:百度营销的API无代码解决方案,提升电商与广告效率
百度营销API连接:构建无代码开发的高效集成体系 在数字营销的高速发展时代,企业追求的是快速响应市场的能力以及提高用户运营的效率。百度营销API连接正是为此而生,它通过无代码开发的方式,实现了电商平台、营销系统和CRM的一站式…...
网络基础(十一):VRRP原理与配置
目录 前言: 1、VRRP的基本概述 2、VRRP的基本原理 2.1VRRP的基本结构 2.2设备类型 2.3状态机 2.4VRRP路由器的抢占功能 2.5VRRP路由器的优先级 2.6VRRP工作原理 2.7主备路由器的工作内容 3、VRRP的基本配置 3.1配置主路由器和备用路由器 3.2配置PC1与P…...
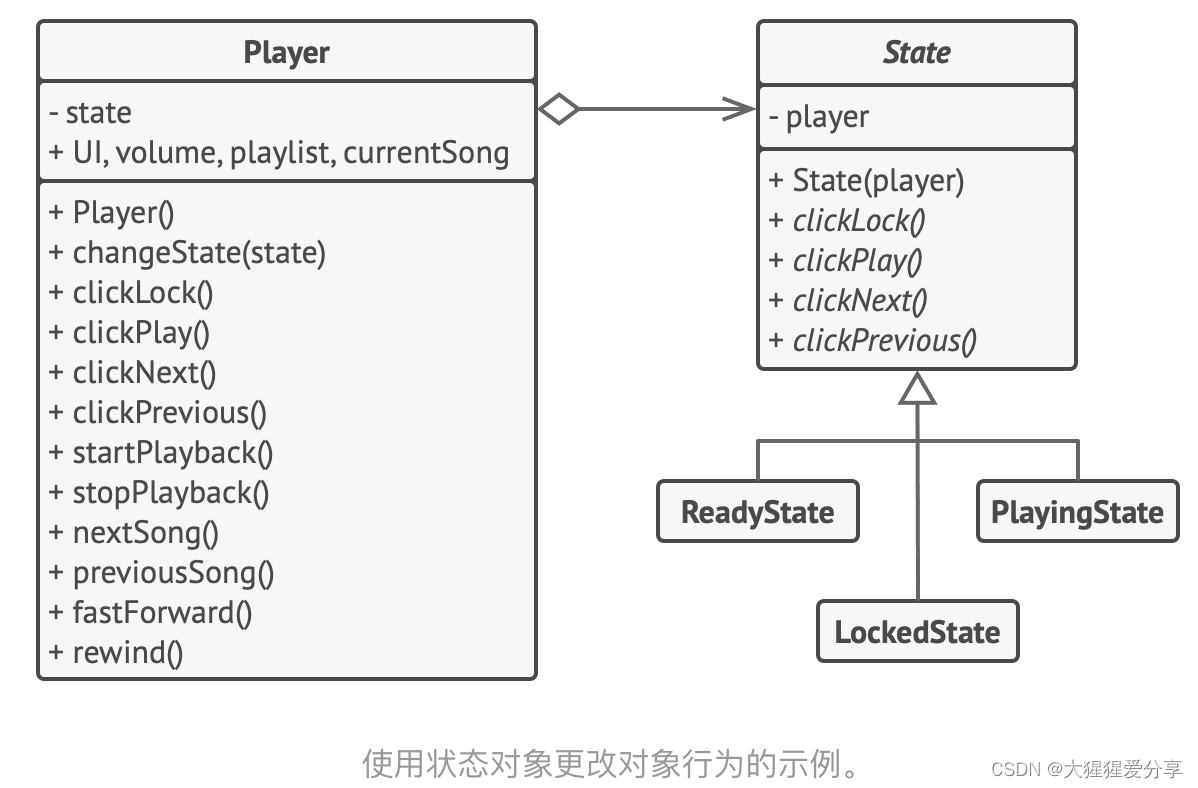
设计模式——状态模式
引言 状态模式是一种行为设计模式, 让你能在一个对象的内部状态变化时改变其行为, 使其看上去就像改变了自身所属的类一样。 问题 状态模式与有限状态机 的概念紧密相关。 其主要思想是程序在任意时刻仅可处于几种有限的状态中。 在任何一个特定状态中…...

2020-XNUCA babyv8
做的第一道存在指针压缩机制的V8题,通过小越界写修改length构造大越界读写,然后利用arraybuffer的backing store构造任意地址写,利用wasm rwx段地址的特点以及堆空间的分布,搜索到rwx段的具体地址,然后利用任意地址写将…...

货物数据处理pandas版
1求和 from openpyxl import load_workbook import pandas as pddef print_hi(name):# Use a breakpoint in the code line below to debug your script.print(fHi, {name}) # Press CtrlF8 to toggle the breakpoint.# Press the green button in the gutter to run the scr…...
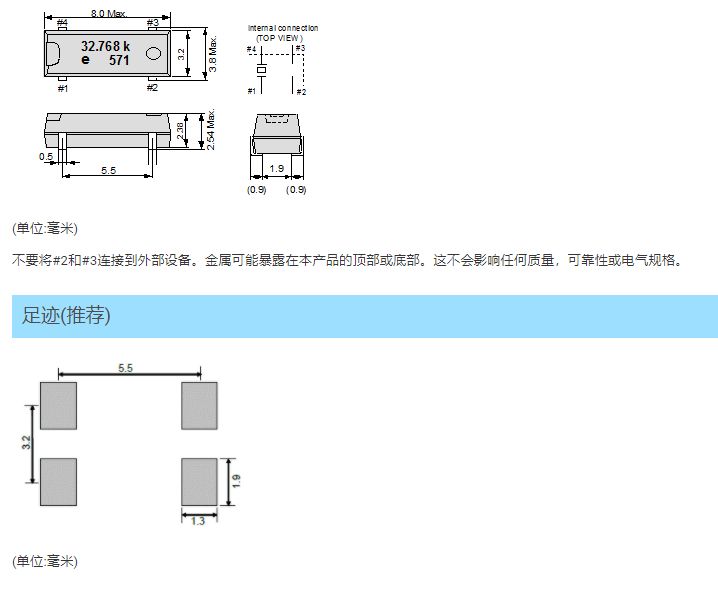
MC-30A (32.768 kHz用于汽车应用的晶体单元)
MC-30A 32.768 kHz用于汽车应用的晶体,车规晶振中的热销型号之一。该款石英晶体谐振器,可以在-40 to 85 C的温度内稳定工作,能满足起动振动的要求。同时满足AEC-Q200无源元件质量标准认证,满足汽车仪表系统的所有要求。 频率范围…...
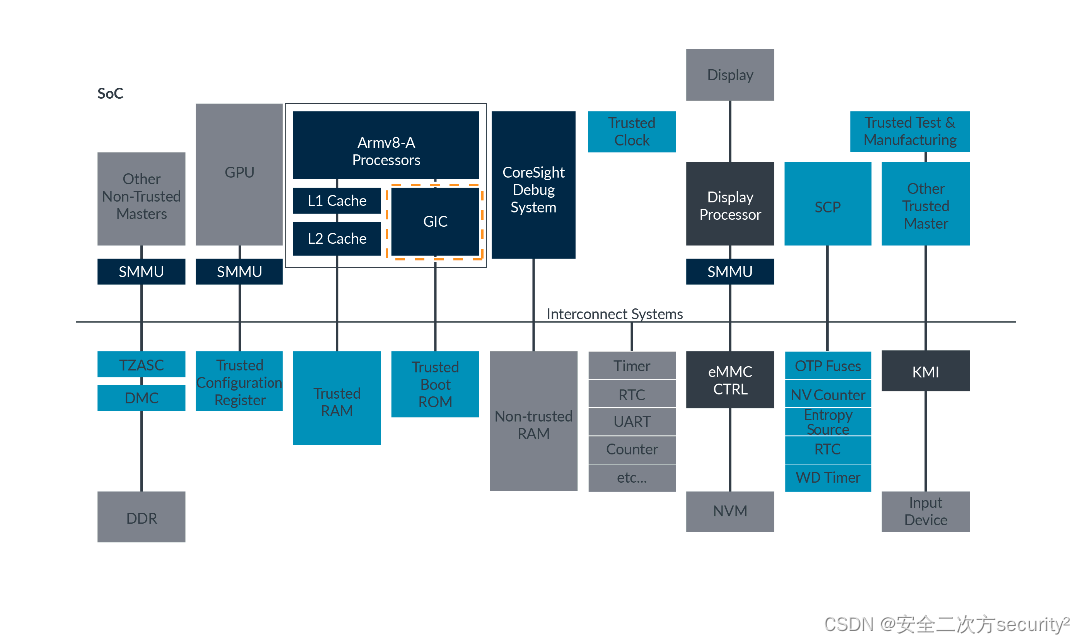
TrustZone之其他设备及可信基础系统架构
一、其他设备 最后,我们将查看系统中的其他设备,如下图所示: 我们的示例TrustZone启用的系统包括一些尚未涵盖的设备,但我们需要这些设备来构建一个实际的系统。 • 一次性可编程存储器(OTP)或保险丝 这些是一旦写入就无法更改的存储器。与每个芯片上都包含相同…...

自由编程学习资源:free-programming-books
最近,我发现了一个在GitHub上备受欢迎的项目,它为程序员和编程爱好者提供了丰富、免费且高质量的学习资料,这就是"free-programming-books"。目前,这个项目在GitHub上已经有305k的star,显示出它在开发者社区…...
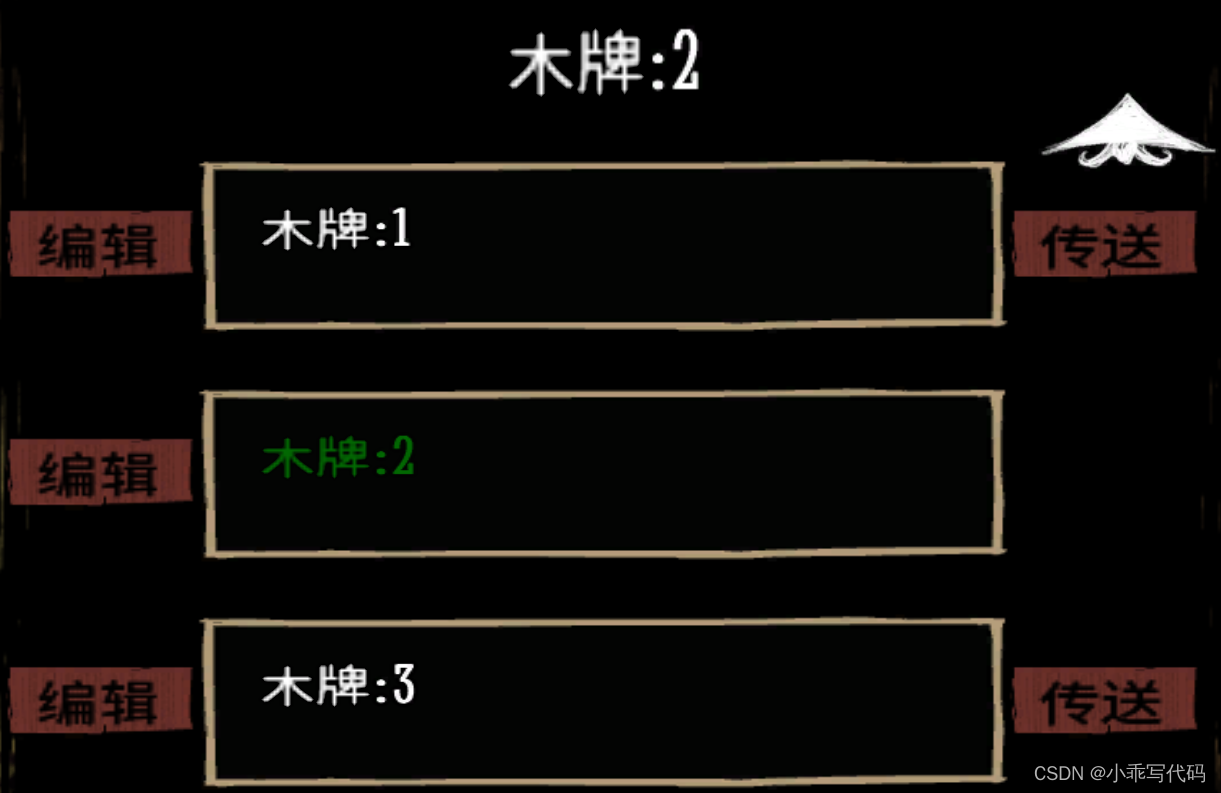
饥荒Mod 开发(十三):木牌传送
饥荒Mod 开发(十二):一键制作 饥荒Mod 开发(十四):制作屏幕弹窗 一键传送源码 饥荒的地图很大,跑地图太耗费时间和饥饿值,如果大部分时间都在跑图真的是很无聊,所以需要有一个能够传送的功能,不仅可以快速…...
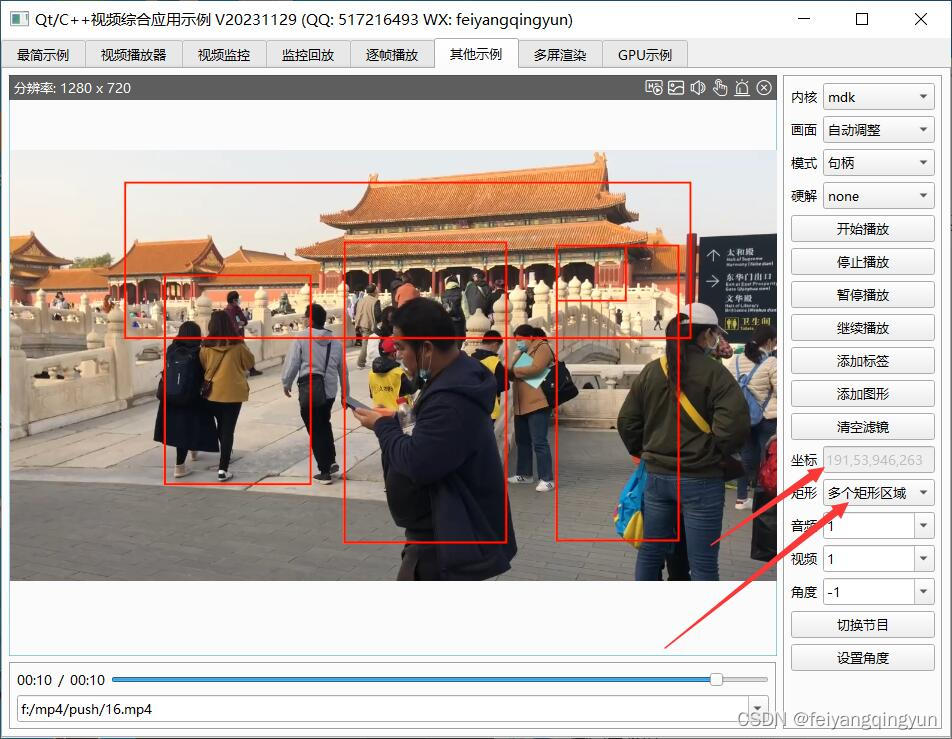
Qt/C++音视频开发60-坐标拾取/按下鼠标获取矩形区域/转换到视频源真实坐标
一、前言 通过在通道画面上拾取鼠标按下的坐标,然后鼠标移动,直到松开,根据松开的坐标和按下的坐标,绘制一个矩形区域,作为热点或者需要电子放大的区域,拿到这个坐标区域,用途非常多࿰…...

Java实现订单超时未支付自动取消的8种方法总结
Java实现订单超时未支付自动取消的8种方法总结 定时轮询 数据库定时轮询方式,实现思路比较简单。启动一个定时任务,每隔一定时间扫描订单表,查询到超时订单就取消。优点:实现简单。缺点:轮询时间间隔不好确定&#x…...

Cursor AI Pro破解工具2025:终极免费方案解决试用限制问题
Cursor AI Pro破解工具2025:终极免费方案解决试用限制问题 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached your…...

ARM AMUv1架构解析与性能监控实战
1. ARM AMUv1活动监视器架构解析活动监视器(Activity Monitor Unit,简称AMU)是ARM架构中用于性能监控的关键硬件组件。作为处理器微架构的一部分,AMU通过专用硬件计数器实现对处理器行为的精确测量。我第一次在Cortex-A76芯片上接…...

终极指南:5分钟快速修复Windows更新问题的完整解决方案
终极指南:5分钟快速修复Windows更新问题的完整解决方案 【免费下载链接】Script-Reset-Windows-Update-Tool This script reset the Windows Update Components. 项目地址: https://gitcode.com/gh_mirrors/sc/Script-Reset-Windows-Update-Tool 当Windows更…...

毫米波雷达测心率靠谱吗?聊聊TI方案在车载健康监测中的真实挑战与未来
毫米波雷达在车载健康监测中的技术突破与实践挑战 当方向盘成为健康监测的第一道防线,毫米波雷达正在重新定义智能座舱的生物感知能力。不同于医院里笨重的心电监护仪或智能手表上时灵时不灵的光电传感器,藏在汽车顶棚或座椅背后的毫米波芯片,…...

2026年IEEE TASE,基于不平衡与平衡竞争策略辅助的双种群优化算法+约束多目标优化,深度解析+性能实测
目录1.摘要2.CMOPs3.提出方法4.结果展示5.参考文献6.代码获取7.算法辅导应用定制读者交流1.摘要 针对具有复杂碎片化可行域约束多目标优化难题,本文提出一种基于不平衡与平衡竞争策略辅助的双种群算法(UBCSO),通过平衡种群的均匀…...

Windows 11本地部署最新大模型深度方案
一、方案概述 随着大语言模型的快速发展,本地部署已成为保护数据隐私、降低API成本的重要选择。本方案将详细介绍在Windows 11系统上部署最新大模型的完整流程,包括硬件配置、环境搭建、模型选择和性能优化。 二、硬件配置要求 2.1 最低配置 GPU: NVIDIA…...

在Windows 10上搞定OpenPCDet:从KITTI数据集训练到自定义数据集的完整避坑指南
在Windows 10上搞定OpenPCDet:从KITTI数据集训练到自定义数据集的完整避坑指南 3D目标检测技术正在重塑自动驾驶、机器人感知等领域的发展格局。作为该领域的重要开源框架,OpenPCDet以其模块化设计和出色的性能表现吸引了大量研究者和开发者。然而&#…...
)
限时开放:ChatGPT Slogan生成专业版Prompt集(含金融/快消/科技三大垂直领域加密模板)
更多请点击: https://intelliparadigm.com 第一章:ChatGPT Slogan生成的核心原理与边界认知 ChatGPT 生成 slogan 的本质并非“创意发明”,而是基于大规模语料统计规律的条件概率采样。其输出受限于训练数据分布、指令微调策略(如…...

福特技术复兴:用户体验整合如何重塑汽车行业竞争格局
1. 福特的技术复兴之路:一次深度拆解十年前,当大多数传统汽车制造商还在为金融危机后的生存而挣扎时,福特汽车做出了一个在当时看来颇具前瞻性的决定:将技术,而非仅仅是马力或造型,作为品牌复兴的核心驱动力…...
)
老笔记本焕发第二春:微星GT60升级GTX1060保姆级避坑指南(含硬件ID修改)
微星GT60笔记本升级GTX1060全流程实战:从硬件改造到驱动破解 当手头的微星GT60笔记本逐渐跟不上现代游戏需求时,许多玩家会考虑升级显卡来延续它的使用寿命。MXM接口的GTX1060显卡因其性价比和性能表现成为热门选择,但整个升级过程充满技术陷…...