动态窗口法Dynamic Window Approach在动态环境中避障
以这个博主的代码为基础,加了一个碰撞检测,但是这个碰撞检测目前还不完善,思路应该是这个思路,以后有时间再完善吧。
动态窗口法:【路径规划】局部路径规划算法——DWA算法(动态窗口法)|(含python实现 | c++实现)-CSDN博客
DWA的大致思路就是,在一个线速度和角度的可行二维空间中,进行采样,计算每个可行速度在未来一定时间内的轨迹(假定匀速运动), 对这些轨迹进行评价,取最优轨迹,以最有轨迹对应的当前下一时刻的线速度和角速度,最为速度控制器的v_target。缺点是容易陷入局部最优。
import randomimport numpy as np
import matplotlib.pyplot as plt
import math
import timeclass Config:"""simulation parameter class"""def __init__(self):# robot parameter# 线速度边界self.v_max = 1.0 # [m/s]self.v_min = -0.5 # [m/s]# 角速度边界self.w_max = 40.0 * math.pi / 180.0 # [rad/s]self.w_min = -40.0 * math.pi / 180.0 # [rad/s]# 线加速度和角加速度最大值self.a_vmax = 0.2 # [m/ss]self.a_wmax = 40.0 * math.pi / 180.0 # [rad/ss]# 采样分辨率self.v_sample = 0.01 # [m/s]self.w_sample = 0.1 * math.pi / 180.0 # [rad/s]# 离散时间self.dt = 0.1 # [s] Time tick for motion prediction# 轨迹推算时间长度self.predict_time = 3.0 # [s]# 轨迹评价函数系数self.alpha = 0.15self.beta = 1.0self.gamma = 1.0# Also used to check if goal is reached in both typesself.robot_radius = 1.0 # [m] for collision checkself.judge_distance = 10 # 若与障碍物的最小距离大于阈值(例如这里设置的阈值为robot_radius+0.2),则设为一个较大的常值class DWA:def __init__(self, config) -> None:"""初始化Args:config (_type_): 参数类"""self.dt = config.dtself.v_min = config.v_minself.w_min = config.w_minself.v_max = config.v_maxself.w_max = config.w_maxself.predict_time = config.predict_timeself.a_vmax = config.a_vmaxself.a_wmax = config.a_wmaxself.v_sample = config.v_sample # 线速度采样分辨率self.w_sample = config.w_sample # 角速度采样分辨率self.alpha = config.alphaself.beta = config.betaself.gamma = config.gammaself.radius = config.robot_radiusself.judge_distance = config.judge_distancedef dwa_control(self, state, goal, obstacle, ob_dyna, dyna_ob_v):"""滚动窗口算法入口Args:state (_type_): 机器人当前状态--[x,y,yaw,v,w]goal (_type_): 目标点位置,[x,y]obstacle (_type_): 障碍物位置,dim:[num_ob,2]Returns:_type_: 控制量、轨迹(便于绘画)"""control, trajectory = self.trajectory_evaluation(state, goal, obstacle, ob_dyna, dyna_ob_v)return control, trajectorydef cal_dynamic_window_vel(self, v, w, state, obstacle):"""速度采样,得到速度空间窗口Args:v (_type_): 当前时刻线速度w (_type_): 当前时刻角速度state (_type_): 当前机器人状态obstacle (_type_): 障碍物位置Returns:[v_low,v_high,w_low,w_high]: 最终采样后的速度空间"""Vm = self.__cal_vel_limit()Vd = self.__cal_accel_limit(v, w)Va = self.__cal_obstacle_limit(state, obstacle)a = max([Vm[0], Vd[0], Va[0]])b = min([Vm[1], Vd[1], Va[1]])c = max([Vm[2], Vd[2], Va[2]])d = min([Vm[3], Vd[3], Va[3]])return [a, b, c, d]def __cal_vel_limit(self):"""计算速度边界限制VmReturns:_type_: 速度边界限制后的速度空间Vm"""return [self.v_min, self.v_max, self.w_min, self.w_max]def __cal_accel_limit(self, v, w):"""计算加速度限制VdArgs:v (_type_): 当前时刻线速度w (_type_): 当前时刻角速度Returns:_type_:考虑加速度时的速度空间Vd"""v_low = v - self.a_vmax * self.dtv_high = v + self.a_vmax * self.dtw_low = w - self.a_wmax * self.dtw_high = w + self.a_wmax * self.dtreturn [v_low, v_high, w_low, w_high]def __cal_obstacle_limit(self, state, obstacle):"""环境障碍物限制VaArgs:state (_type_): 当前机器人状态obstacle (_type_): 障碍物位置Returns:_type_: 某一时刻移动机器人不与周围障碍物发生碰撞的速度空间Va"""# 不与静态障碍物碰撞v_low = self.v_minv_high = np.sqrt(2 * self._dist(state, obstacle[:, :]) * self.a_vmax)w_low = self.w_minw_high = np.sqrt(2 * self._dist(state, obstacle[:, :]) * self.a_wmax)return [v_low, v_high, w_low, w_high]def trajectory_predict(self, state_init, v, w):"""轨迹推算Args:state_init (_type_): 当前状态---x,y,yaw,v,wv (_type_): 当前时刻线速度w (_type_): 当前时刻线速度Returns:_type_: _description_"""state = np.array(state_init)trajectory = state_time = 0# 在预测时间段内while _time <= self.predict_time:x = KinematicModel(state, [v, w], self.dt) # 运动学模型trajectory = np.vstack((trajectory, x))_time += self.dtreturn trajectorydef predict_dyna_ob_traj(self, ob_dyna, dyna_ob_v):trajectory = np.zeros((ob_dyna.shape[0], int(self.predict_time / self.dt) + 1, 2))trajectory[0, 0, 0] = ob_dyna[0, 0]trajectory[0, 0, 1] = ob_dyna[0, 1]trajectory[1, 0, 0] = ob_dyna[1, 0]trajectory[1, 0, 1] = ob_dyna[1, 1]time = 0idx = 1while time <= self.predict_time:# 维度:个体数 时刻 坐标trajectory[0, idx, 0] = trajectory[0, idx - 1, 0] + dyna_ob_v[0, 0] * self.dttrajectory[0, idx, 1] = trajectory[0, idx - 1, 1] + dyna_ob_v[0, 1] * self.dttrajectory[1, idx, 0] = trajectory[1, idx - 1, 0] + dyna_ob_v[1, 0] * self.dttrajectory[1, idx, 1] = trajectory[1, idx - 1, 1] + dyna_ob_v[1, 1] * self.dttime += self.dtidx += 1return trajectorydef collision_detection(self, trajectory, traj_dyob):trajectory = np.repeat(trajectory[np.newaxis, :, :], 2, axis=0)distances = np.linalg.norm(trajectory - traj_dyob, axis=2)min_values = np.min(distances, axis=1)min_value = np.min(min_values, axis=0)if min_value < 0.3:return Trueelse:return Falsedef trajectory_evaluation(self, state, goal, obstacle, ob_dyna, ob_dyna_v):"""轨迹评价函数,评价越高,轨迹越优Args:state (_type_): 当前状态---x,y,yaw,v,wdynamic_window_vel (_type_): 采样的速度空间窗口---[v_low,v_high,w_low,w_high]goal (_type_): 目标点位置,[x,y]obstacle (_type_): 障碍物位置,dim:[num_ob,2]Returns:_type_: 最优控制量、最优轨迹"""G_max = -float('inf') # 最优评价trajectory_opt = state # 最优轨迹control_opt = [0., 0.] # 最优控制dynamic_window_vel = self.cal_dynamic_window_vel(state[3], state[4], state, obstacle) # 第1步--计算速度空间# 在速度空间中按照预先设定的分辨率采样sum_heading, sum_dist, sum_vel = 1, 1, 1 # 不进行归一化for v in np.arange(dynamic_window_vel[0], dynamic_window_vel[1], self.v_sample):for w in np.arange(dynamic_window_vel[2], dynamic_window_vel[3], self.w_sample):trajectory = self.trajectory_predict(state, v, w) # 第2步--轨迹推算heading_eval = self.alpha * self.__heading(trajectory, goal) / sum_headingdist_eval = self.beta * self.__dist(trajectory, obstacle) / sum_distvel_eval = self.gamma * self.__velocity(trajectory) / sum_velG = heading_eval + dist_eval + vel_eval # 第3步--轨迹评价if G_max <= G:G_max = Gtrajectory_opt = trajectorycontrol_opt = [v, w]traj_dyob = self.predict_dyna_ob_traj(ob_dyna, ob_dyna_v)collision = self.collision_detection(trajectory_opt[:, :2], traj_dyob)if collision:control_opt = [0, 0]return control_opt, trajectory_optdef _dist(self, state, obstacle):"""计算当前移动机器人距离障碍物最近的几何距离Args:state (_type_): 当前机器人状态obstacle (_type_): 障碍物位置Returns:_type_: 移动机器人距离障碍物最近的几何距离"""ox = obstacle[:, 0]oy = obstacle[:, 1]dx = state[0, None] - ox[:, None]dy = state[1, None] - oy[:, None]r = np.hypot(dx, dy)return np.min(r)def __dist(self, trajectory, obstacle):"""距离评价函数表示当前速度下对应模拟轨迹与障碍物之间的最近距离;如果没有障碍物或者最近距离大于设定的阈值,那么就将其值设为一个较大的常数值。Args:trajectory (_type_): 轨迹,dim:[n,5]obstacle (_type_): 障碍物位置,dim:[num_ob,2]Returns:_type_: _description_"""ox = obstacle[:, 0]oy = obstacle[:, 1]dx = trajectory[:, 0] - ox[:, None]dy = trajectory[:, 1] - oy[:, None]r = np.hypot(dx, dy)return np.min(r) if np.array(r < self.radius + 0.2).any() else self.judge_distancedef __heading(self, trajectory, goal):"""方位角评价函数评估在当前采样速度下产生的轨迹终点位置方向与目标点连线的夹角的误差Args:trajectory (_type_): 轨迹,dim:[n,5]goal (_type_): 目标点位置[x,y]Returns:_type_: 方位角评价数值"""dx = goal[0] - trajectory[-1, 0]dy = goal[1] - trajectory[-1, 1]error_angle = math.atan2(dy, dx)cost_angle = error_angle - trajectory[-1, 2]cost = math.pi - abs(cost_angle)return costdef __velocity(self, trajectory):"""速度评价函数, 表示当前的速度大小,可以用模拟轨迹末端位置的线速度的大小来表示Args:trajectory (_type_): 轨迹,dim:[n,5]Returns:_type_: 速度评价"""return trajectory[-1, 3]def KinematicModel(state, control, dt):"""机器人运动学模型Args:state (_type_): 状态量---x,y,yaw,v,wcontrol (_type_): 控制量---v,w,线速度和角速度dt (_type_): 离散时间Returns:_type_: 下一步的状态"""state[0] += control[0] * math.cos(state[2]) * dtstate[1] += control[0] * math.sin(state[2]) * dtstate[2] += control[1] * dtstate[3] = control[0]state[4] = control[1]return statedef plot_arrow(x, y, yaw, length=0.5, width=0.1): # pragma: no coverplt.arrow(x, y, length * math.cos(yaw), length * math.sin(yaw),head_length=width, head_width=width)plt.plot(x, y)def plot_robot(x, y, yaw, config): # pragma: no covercircle = plt.Circle((x, y), config.robot_radius, color="b")plt.gcf().gca().add_artist(circle)out_x, out_y = (np.array([x, y]) +np.array([np.cos(yaw), np.sin(yaw)]) * config.robot_radius)plt.plot([x, out_x], [y, out_y], "-k")def dynamic_ob(t, dyna_ob_v):y1 = (dyna_ob_v[0, 1] * t) % 14x2 = (dyna_ob_v[1, 0] * t) % 9return np.array([[9, y1],[x2, 9]])def do_dwa(current_x=0.0, current_y=0.0, goal_x=10.0, goal_y=10.0, ob=np.array([[-1, -1]])):# initial state [x(m), y(m), yaw(rad), v(m/s), omega(rad/s)]x = np.array([current_x, current_y, math.pi / 8.0, 0.0, 0.0])# goal position [x(m), y(m)]goal = np.array([goal_x, goal_y])config = Config()trajectory = np.array(x)dwa = DWA(config)# fig=plt.figure(1)st_i = 0while True:ob_speed = 0.2dyna_ob_v = np.array([[0, ob_speed],[ob_speed, 0]])ob_dyna = dynamic_ob(st_i, dyna_ob_v)u, predicted_trajectory = dwa.dwa_control(x, goal, ob, ob_dyna, dyna_ob_v)x = KinematicModel(x, u, config.dt) # simulate robottrajectory = np.vstack((trajectory, x)) # store state historyplt.cla()# for stopping simulation with the esc key.plt.gcf().canvas.mpl_connect('key_release_event',lambda event: [exit(0) if event.key == 'escape' else None])try:plt.plot(predicted_trajectory[:, 0], predicted_trajectory[:, 1], "-g")except:passplt.plot(x[0], x[1], "xr")plt.plot(goal[0], goal[1], "xb")plt.plot(ob[:, 0], ob[:, 1], "ok")plt.plot(ob_dyna[:, 0], ob_dyna[:, 1], "ok")plot_robot(x[0], x[1], x[2], config)plot_arrow(x[0], x[1], x[2])plt.axis("equal")plt.grid(True)plt.pause(0.001)st_i += 1# check reaching goaldist_to_goal = math.hypot(x[0] - goal[0], x[1] - goal[1])if dist_to_goal <= config.robot_radius:print("Goal!!")breakprint("Done")# plt.plot(trajectory[:, 0], trajectory[:, 1], "-r")# plt.pause(0.001)# plt.show()return trajectoryif __name__ == "__main__":num_points = 10points = [(random.uniform(0, 16), random.uniform(0, 16)) for _ in range(num_points)]ob = np.array(points)current_x = 0.0current_y = 0.0goal_x = 10.0goal_y = 10.0current_x = random.randint(-5, 2)current_y = random.randint(2, 7)trajectory = do_dwa(current_x, current_y, goal_x, goal_y, ob=ob)plt.scatter(ob[:, 0], ob[:, 1], c="k")plt.plot(trajectory[:, 0], trajectory[:, 1], "-r")plt.show()print(trajectory)
相关文章:

动态窗口法Dynamic Window Approach在动态环境中避障
以这个博主的代码为基础,加了一个碰撞检测,但是这个碰撞检测目前还不完善,思路应该是这个思路,以后有时间再完善吧。 动态窗口法:【路径规划】局部路径规划算法——DWA算法(动态窗口法)|&#…...
2023.12.15 FineBI与kettle
1.结构化就是可以用schema描述的数据,就是结构化数据,能转为二维表格, 如CSV,Excel, 2.半结构化就是部分可以转换为二维表格,如JSON,XML 3.非结构化数据,就是完全无法用二维表格表示的数据,如Word文档,Mp4,图片,等文件. kettle的流程 新建转换-构建流图-配置组件-保存运行 使…...
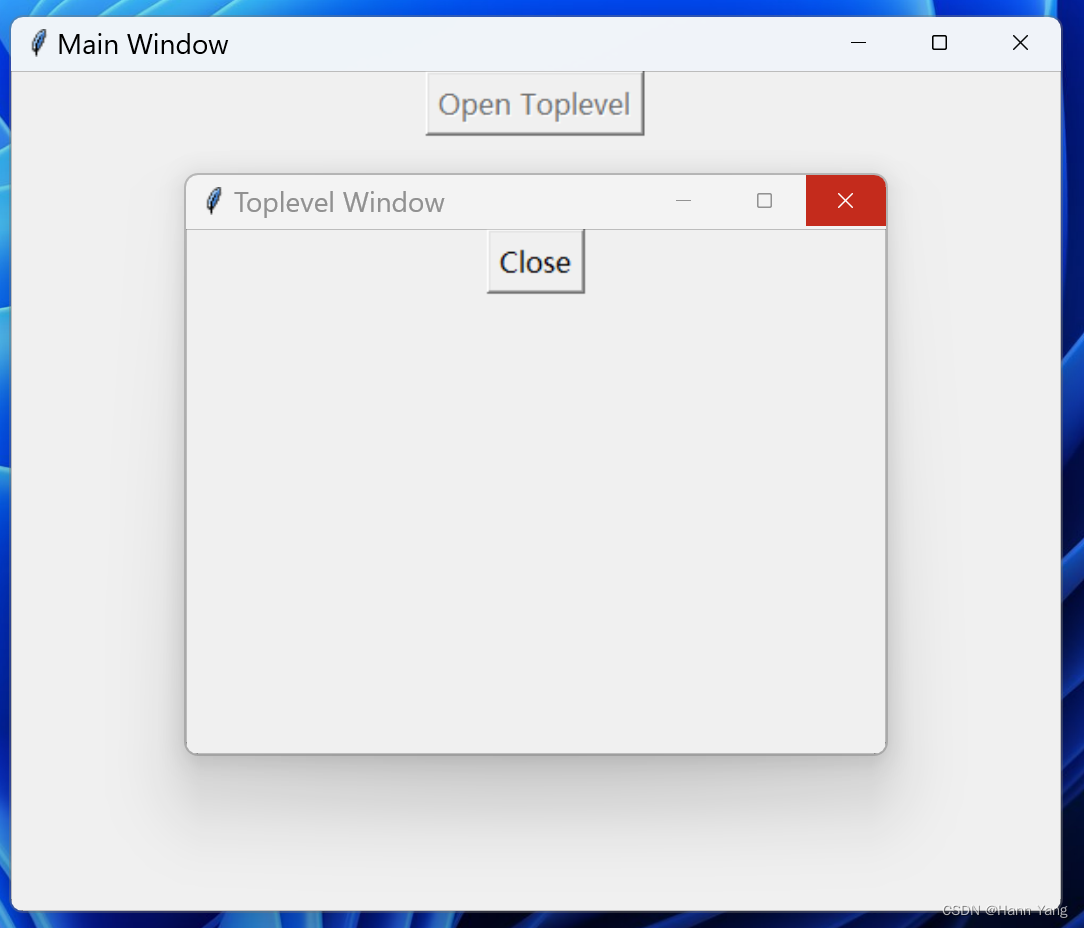
Python tkinter 初探Toplevel控件搭建父子窗口
目录 Toplevel控件搭建父子窗口 最简明的父子窗口框架 改进一:屏蔽和开放按钮 改进二:子窗口始终在主窗口之上 改进三:增加子窗口的关闭协议 改进四:使子窗口长获焦点 总结 Toplevel控件搭建父子窗口 最近,用P…...
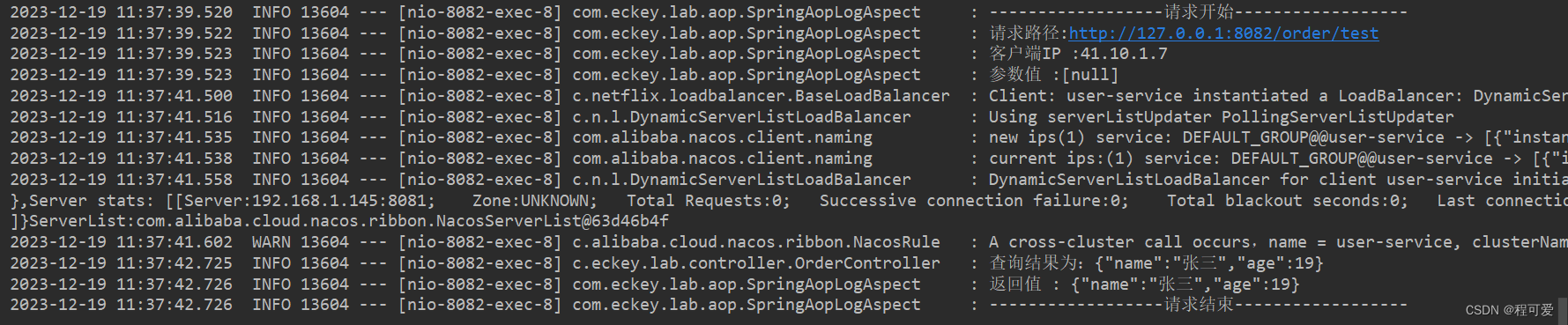
SpringCloud源码探析(十二)-基于SpringBoot开发自定义中间件
1.概述 中间件是一种介于操作系统和应用软件之间,为应用软件提供服务功能的软件,按功能划分有消息中间件(Kafka、RocketMQ)、通信中间件(RPC通信中间件,dubbo等),应用服务器等。中间…...
基于CNN+数据增强+残差网络Resnet50的少样本高准确度猫咪种类识别—深度学习算法应用(含全部工程源码)+数据集+模型(一)
系列文章目录 基于CNN数据增强残差网络Resnet50的少样本高准确度猫咪种类识别—深度学习算法应用(含全部工程源码)数据集模型(一) 基于CNN数据增强残差网络Resnet50的少样本高准确度猫咪种类识别—深度学习算法应用(含全部工程源码)数据集模型…...
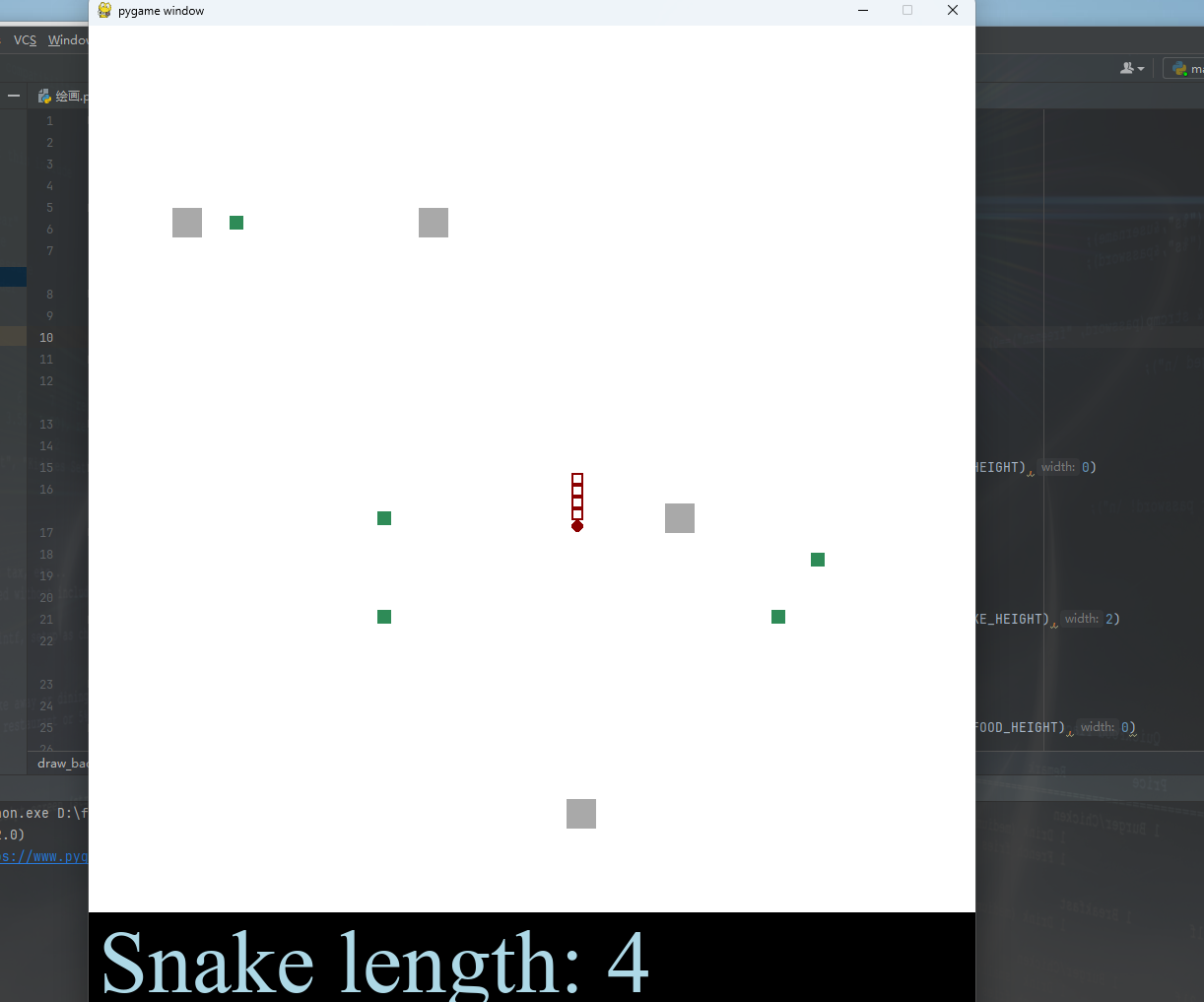
python实现贪吃蛇游戏
文章目录 1、项目说明2、项目预览3、开发必备4、贪吃蛇代码实现4.1、窗口和基本参数实现4.2、绘制背景4.3、绘制墙壁4.4、绘制贪吃蛇4.5、绘制食物4.6、实现长度信息显示4.7、定义游戏暂停界面4.8、定义贪吃蛇死亡界面4.9、实现贪吃蛇碰撞效果4.10、实现添加食物功能4.11、实现…...

ios备忘录怎么导入华为 方法介绍
作为一个常常需要在不同设备间切换的人,我深知备忘录的重要性。那些突如其来的灵感、重要的会议提醒、甚至是生活中的琐碎小事,我们都习惯性地记录在备忘录里。但当我决定从iPhone转向华为时,一个问题困扰了我:如何将那些珍贵的备…...
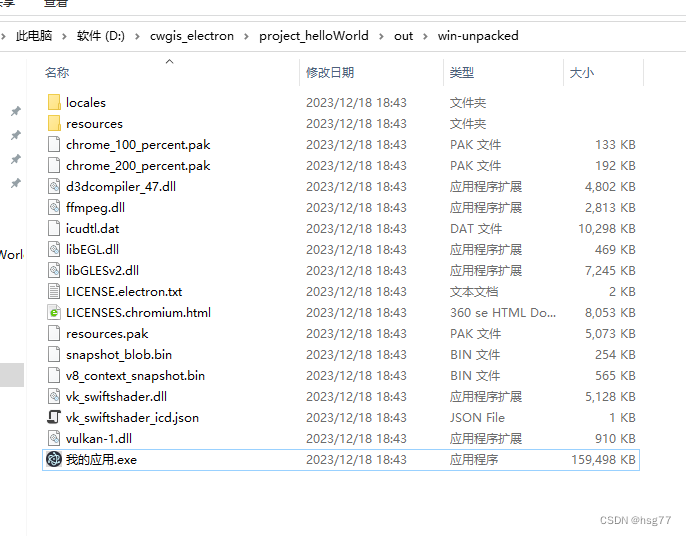
electron与cesium组件入门应用功能
electron与cesium组件入门应用功能 运行应用效果图: electron应用目录,需要包括三个文件: index.html main.js package.json (一)、创建一个新项目 目录名称:project_helloWolrd (二)、生成package.json文件 npm init --yes(三&#x…...
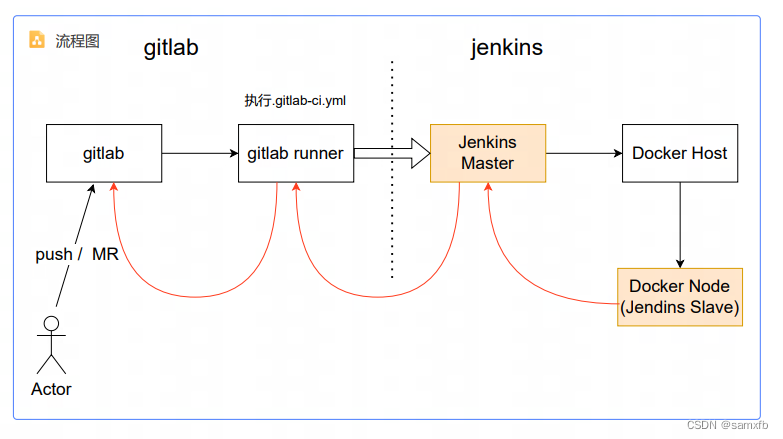
Jenkins Docker Cloud在Linux应用开发CI中的实践
Jenkins Docker Cloud在Linux应用开发CI中的实践 背景 通过代码提交自动触发CI自动构建、编译、打包是任何软件开发组织必不可少的基建,可以最大程度保证产物的一致性,方便跨组跨部门协作,代码MR等。 Docker在流水线中越来越重要ÿ…...

502 Bad Gateway with nginx + apache + subversion + ssl
svn commit的时候返回 unexpected http status 502 bad gateway on解决方法,参考:https://stackoverflow.com/questions/2479346/502-bad-gateway-with-nginx-apache-subversion-ssl-svn-copy 在nginx中代理svn中添加 location /svn {set $fixed_dest…...
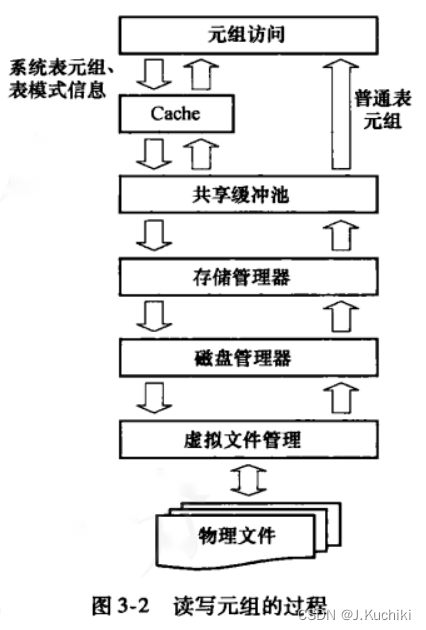
【PostgreSQL内核学习(十八)—— 存储管理(存储管理的体系结构)】
存储管理 概述存储管理器的体系结构存储管理器的主要任务读写元组过程 声明:本文的部分内容参考了他人的文章。在编写过程中,我们尊重他人的知识产权和学术成果,力求遵循合理使用原则,并在适用的情况下注明引用来源。 本文主要参考…...

Android的组件、布局学习
介绍 公司组织架构调整,项目组需要承接其他项目组的android项目,负责维护和开发新需求,故学习下基础语法和项目开发。 组件学习 Toolbarheader布局部分 就是app最顶部的部分 他的显示与否,是与F:\androidProject\android_lear…...

【离散数学】——期末刷题题库(树其一)
🎃个人专栏: 🐬 算法设计与分析:算法设计与分析_IT闫的博客-CSDN博客 🐳Java基础:Java基础_IT闫的博客-CSDN博客 🐋c语言:c语言_IT闫的博客-CSDN博客 🐟MySQL:…...
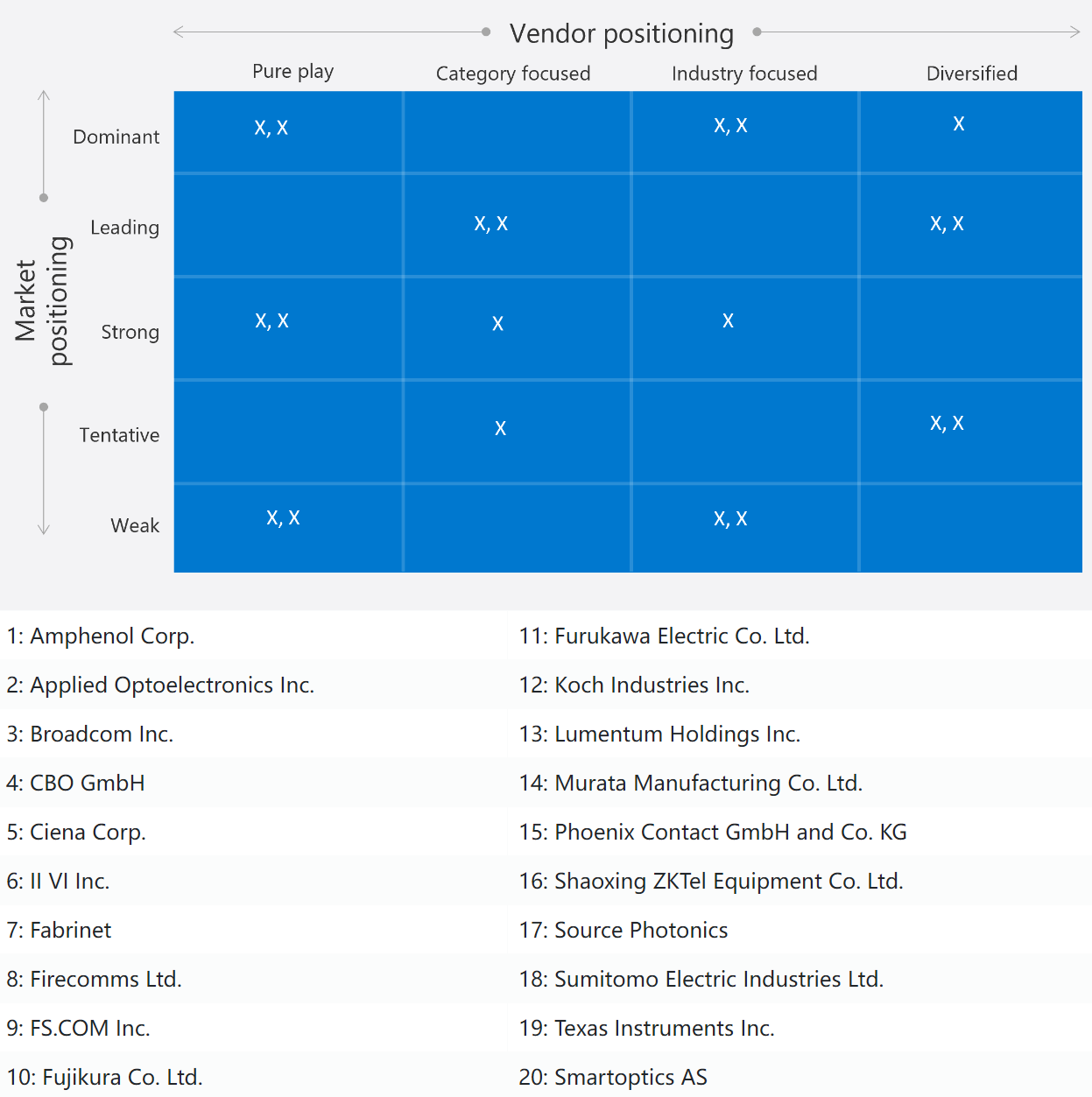
光模块市场分析与发展趋势预测
光模块是光通信领域的重要组成部分,随着数字经济,大数据,云计算,人工智能等行业的兴起,光模块市场经历了快速发展,逐渐在数据中心、无线回传、电信传输等应用场景中得到广泛应用。本文将基于当前光模块全球…...
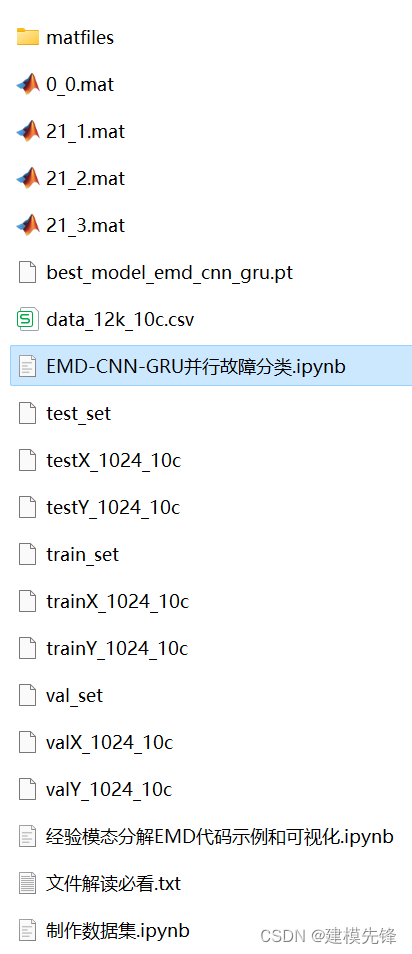
Python轴承故障诊断 (八)基于EMD-CNN-GRU并行模型的故障分类
目录 前言 1 经验模态分解EMD的Python示例 2 轴承故障数据的预处理 2.1 导入数据 2.2 制作数据集和对应标签 2.3 故障数据的EMD分解可视化 2.4 故障数据的EMD分解预处理 3 基于EMD-CNN-GRU并行模型的轴承故障诊断分类 3.1 训练数据、测试数据分组,数据分ba…...

鸿蒙实现年月日十分选择框,支持年月日、月日、日、年月日时分、时分切换
import DateTimeUtils from ./DateTimeUtils;CustomDialog export default struct RQPickerDialog {controller: CustomDialogControllertitle: string 这是标题TAG: string RQPickerDialog// 0 - 日期类型(年月日) 1 - 时间类型(时分&a…...
IntelliJ IDE 插件开发 | (三)消息通知与事件监听
系列文章 IntelliJ IDE 插件开发 |(一)快速入门IntelliJ IDE 插件开发 |(二)UI 界面与数据持久化IntelliJ IDE 插件开发 |(三)消息通知与事件监听 前言 在前两篇文章中讲解了关于插件开发的基础知识&…...

VUE小知识点
Vue 是一款用于构建用户界面的 JavaScript 框架。它基于标准 HTML、CSS 和 JavaScript 构建,并提供了一套声明式的、组件化的编程模型,帮助你高效地开发用户界面。 Vue 的主要作用是帮助开发者构建现代 Web 应用程序。它允许前端开发人员专注于应用程序…...

深入了解常见的应用层网络协议
目录 1. HTTP协议 1.1. 工作原理 1.2. 应用场景 1.3. 安全性考虑 2. SMTP协议 2.1. 工作原理 2.2. 应用场景 2.3. 安全性考虑 3. FTP协议 3.1. 工作原理 3.2. 应用场景 3.3. 安全性考虑 4. DNS协议 4.1. 工作原理 4.2. 应用场景 4.3. 安全性考虑 5. 安全性考虑…...

网络爬虫 多任务采集
一、JSON文件存储 JSON,全称为 JavaScript 0bject Notation,也就是JavaSript 对象标记,它通过对象和数组的组合来表示数据,构造简洁但是结构化程度非常高,是一种轻量级的数据交换格式。本节中,我们就来了解如何利用 P…...

从手机充电到车载电源:TVS管在消费电子和汽车电子中的实战应用避坑
从手机充电到车载电源:TVS管在消费电子和汽车电子中的实战应用避坑 当你的手机充电器在插拔瞬间冒出火花,或是汽车点火时中控屏幕突然黑屏,背后往往隐藏着一个共同的电子防护难题——瞬态电压冲击。TVS管(瞬态电压抑制二极管&…...

LLM应用开发框架llmflows:轻量级工作流编排实战指南
1. 项目概述:一个为LLM应用构建量身定制的轻量级框架最近在折腾大语言模型应用开发的朋友,估计都经历过类似的“甜蜜的烦恼”:想法很美好,但真要把想法变成可运行、可维护的代码,中间隔着无数个坑。从Prompt的反复调试…...

Claude集成OpenClaw:多智能体框架的模型驱动开发实践
1. 项目概述:当Claude遇上OpenClaw,一个智能体协作框架的诞生最近在AI智能体开发圈里,一个名为“gungwang/claude-into-openclaw”的项目引起了我的注意。乍一看这个标题,你可能会有点懵——“Claude”是Anthropic家的那个大语言模…...

别只重启软件!解决ThingWorx连接KepServer报错的正确姿势:瞄准后台驱动
别只重启软件!解决ThingWorx连接KepServer报错的正确姿势:瞄准后台驱动 在工业物联网(IIoT)系统的运维中,ThingWorx与KepServer的通信问题堪称经典难题。许多工程师遇到连接报错时,第一反应往往是重启配置界…...

AI赋能终端:基于LLM的智能命令行助手实现与实战
1. 项目概述:当终端遇见AI,一场效率革命如果你和我一样,每天有超过一半的工作时间是在终端(Terminal)里度过的,那你一定对那种在命令行历史里反复翻找、手动敲击冗长命令、或者为了一个复杂的管道组合而绞尽…...

为什么92%的AIGC剪辑师仍在用手动导出?揭秘Sora 2直连Premiere的7大底层优化与3个避坑红线
更多请点击: https://intelliparadigm.com 第一章:Sora 2与Premiere直连整合的行业悖论与破局起点 当OpenAI正式释放Sora 2的API文档并开放有限开发者预览时,Adobe Premiere Pro团队内部立即启动了“Project Lumen”——一项旨在实现双向帧级…...

5分钟快速上手!FanControl:你的Windows风扇智能管家终极指南
5分钟快速上手!FanControl:你的Windows风扇智能管家终极指南 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/G…...

Beyond Compare 5本地化激活终极指南:三步实现专业文件对比工具永久使用
Beyond Compare 5本地化激活终极指南:三步实现专业文件对比工具永久使用 【免费下载链接】BCompare_Keygen Keygen for BCompare 5 项目地址: https://gitcode.com/gh_mirrors/bc/BCompare_Keygen Beyond Compare作为专业的文件对比与合并工具,其…...
)
基于SSM框架的传统服饰文化平台体验(10034)
有需要的同学,源代码和配套文档领取,加文章最下方的名片哦 一、项目演示 项目演示视频 二、资料介绍 完整源代码(前后端源代码SQL脚本)配套文档(LWPPT开题报告/任务书)远程调试控屏包运行一键启动项目&…...

2025年CMS怎么选?从传统到无头再到AI原生,一份深度选型指南
快速选型参考如果你需要直接的建议,这里是一个基于场景的简明对照:个人博客、小型内容站点:WordPress,生态成熟,主题插件丰富,上手门槛低。多终端内容分发(App、小程序、Web同步)&am…...