ROS学习笔记(七)---参数服务器
ROS学习笔记文章目录
01. ROS学习笔记(一)—Linux安装VScode
02. ROS学习笔记(二)—使用 VScode 开发 ROS 的Python程序(简例)
03. ROS学习笔记(三)—好用的终端Terminator
04. ROS学习笔记(四)—使用 VScode 启动launch文件运行多个节点
05. ROS学习笔记(五)—话题发布
06. ROS学习笔记(六)—服务通信机制
1. 参数服务器是什么
参数服务器是ROS中用于存储和共享参数的中央存储库。它是一个全局的、分布式的键值存储系统,允许ROS节点在运行时动态地存储、读取和更新参数值。参数服务器可以在多个节点之间共享参数,并且可以通过修改参数的值来实现节点之间的通信。
参数服务器的应用场景非常广泛,以下是一些常见的例子:
- 配置参数
参数服务器可以用于存储和共享系统配置参数,例如机器人的硬件参数、传感器的校准参数、控制算法的参数等。这样,多个节点可以方便地读取这些配置参数,而不需要硬编码到节点代码中。 - 运行时参数调整
参数服务器可以在运行时动态地调整节点的参数,而无需重新编译或重新启动节点。这对于调试和优化节点的行为非常有用。 - 状态共享
参数服务器可以用于共享系统的状态信息,例如机器人的位置、目标位置、传感器的测量值等。多个节点可以通过读取参数服务器上的状态参数来了解系统的当前状态。
2. 参数服务器的理论模型
参数服务器的理论模型如下:
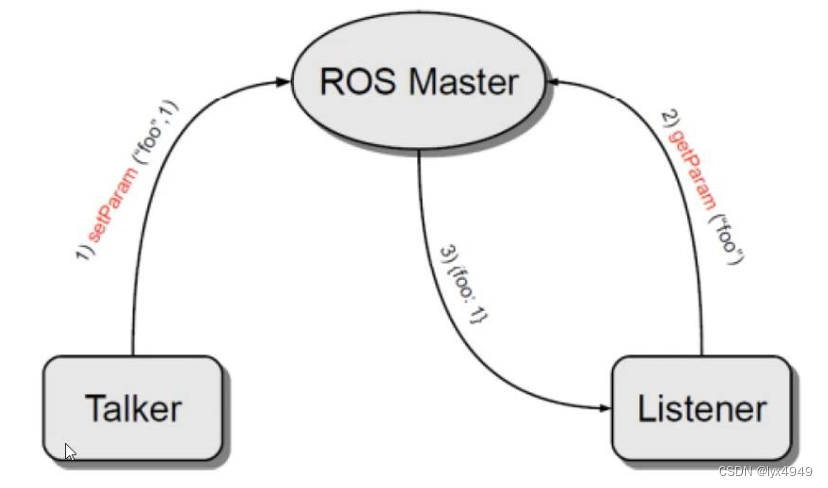
上图参考了赵虚左老师的课程
在这个模型中,ROS Master充当管理者的角色,负责协调和管理整个ROS系统。Talker是参数设置者,负责将参数设置到参数服务器中。Listener是参数调用者,负责从参数服务器中获取参数。
具体流程如下:
- Talker(参数设置者)将参数设置到参数服务器中。它向ROS Master发送请求,告诉ROS Master要将哪个参数设置为什么值。
- ROS Master接收到Talker的请求后,将参数的值保存到参数服务器上。参数服务器是一个分布式的键值存储系统,用于存储ROS节点之间共享的参数和配置信息。
- Listener(参数调用者)想要获取参数的值,它向ROS Master发送请求,告诉ROS Master要获取哪个参数的值。
- ROS Master接收到Listener的请求后,从参数服务器上获取对应参数的值,并将值返回给Listener。
- Listener接收到参数的值后,可以在其节点中使用该值进行相应的操作。
通过这种模型,Talker可以根据需要设置参数的值,而Listener可以根据需要获取参数的值。参数服务器作为一个集中的存储系统,使得参数的设置和获取可以在不同的节点之间进行,实现了参数的共享和动态配置。
3.编写参数服务器(新增(修改)参数)的python案例
(1)任务要求:演示参数的新增与修改需求。即在参数服务器中设置机器人的属性,型号,半径
(2)编写程序实现
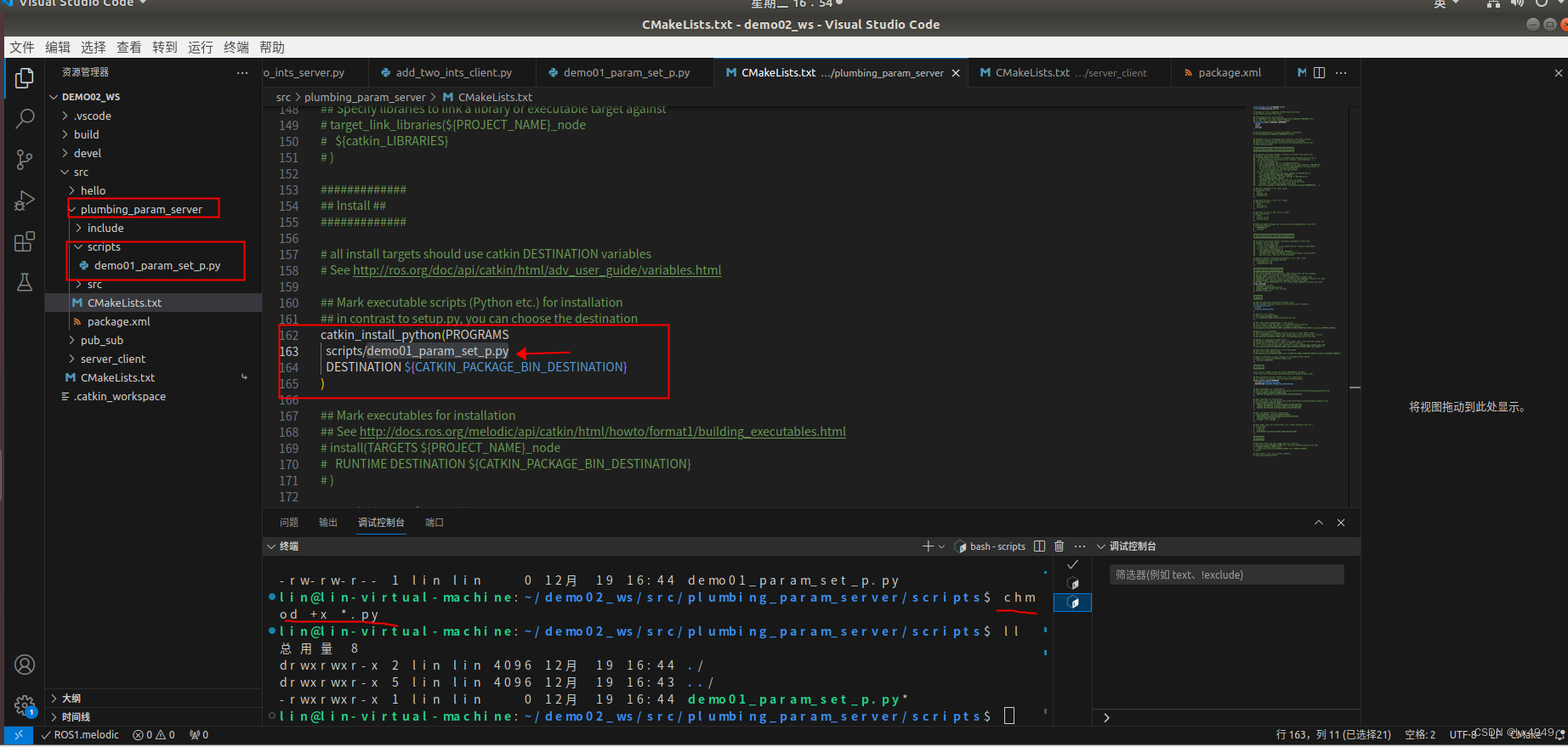
我们在上一个工作空间下面新建plumbing_param_server文件夹作为参数服务器这一项目的功能包,然后创建script文件夹,再新建一个demo01_pub_p.py的文件来编写发布方程序,记得打开python可执行权限,然后编辑配置文件CMakeLists.txt,怎么创建新的功能包等具体可见ROS学习笔记(二)
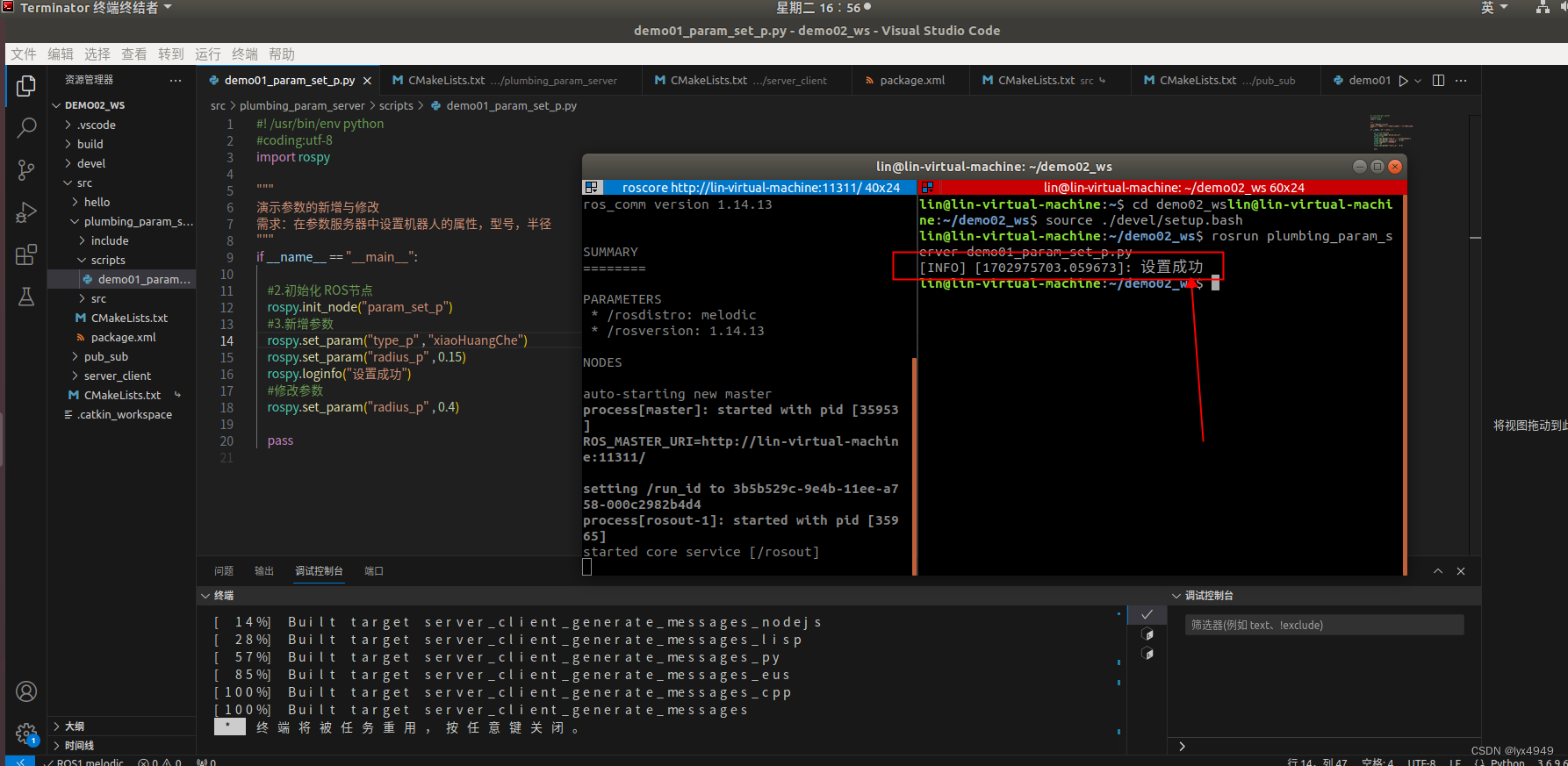
完整程序如下:
#! /usr/bin/env python
#coding:utf-8
import rospy"""
演示参数的新增与修改
需求:在参数服务器中设置机器人的属性,型号,半径
"""
if __name__ == "__main__":#2.初始化 ROS节点rospy.init_node("param_set_p")#3.新增参数rospy.set_param("type_p" , "xiaoHuangChe")rospy.set_param("radius_p" , 0.15)rospy.loginfo("设置成功")#修改参数rospy.set_param("radius_p" , 0.4)passcrtl+B编译运行后,打开终端查看发布方结果,也就只是打印出来一个“设置成功”
(3)查看参数新增与修改的效果
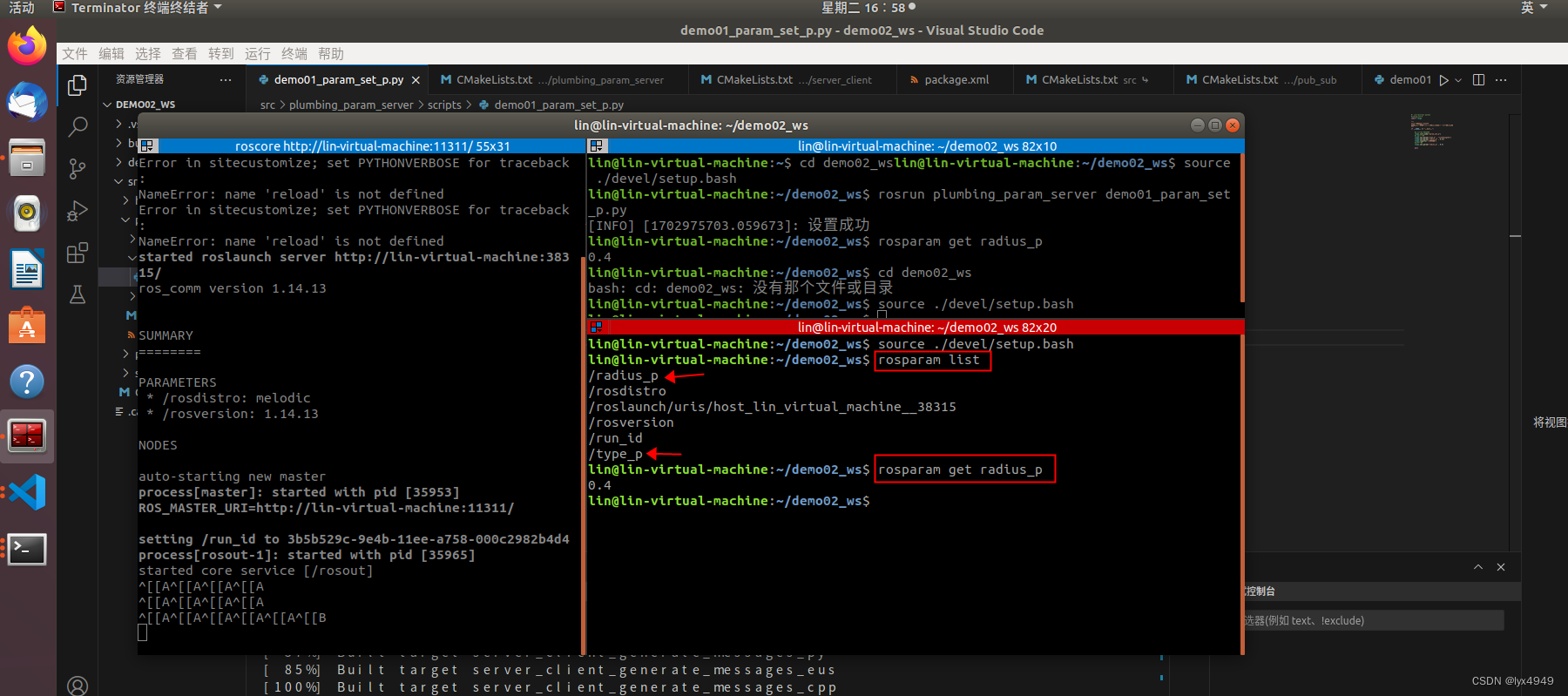
① 通过终端查看参数新增与修改的效果,新增另外一个终端,输入如下命令,可以 列出所有参数。
rosparam list # 列出所有参数
② 通过下面的命令来获取参数
rosparam get name # 获取参数
在新的终端输入rosparsm的相关指令后,获取到发布方的设置的参数,可以看到其中radius_p的取值是我们最后修改的0.4,同样你可以用rosparam get type_p 来获取对应的值。
附rosparam参数的相关命令
rosparam包含rosparam命令行工具,用于使用YAML编码文件在参数服务器上获取和设置ROS参数
rosparam set 设置参数
rosparam get 获取参数
rosparam load 从外部文件加载参数
rosparam dump 将参数写出到外部文件
rosparam delete 删除参数
rosparam list 列出所有参数
相关文章:
ROS学习笔记(七)---参数服务器
ROS学习笔记文章目录 01. ROS学习笔记(一)—Linux安装VScode 02. ROS学习笔记(二)—使用 VScode 开发 ROS 的Python程序(简例) 03. ROS学习笔记(三)—好用的终端Terminator 04. ROS学习笔记(四)—使用 VScode 启动launch文件运行多个节点 05. ROS学习笔…...
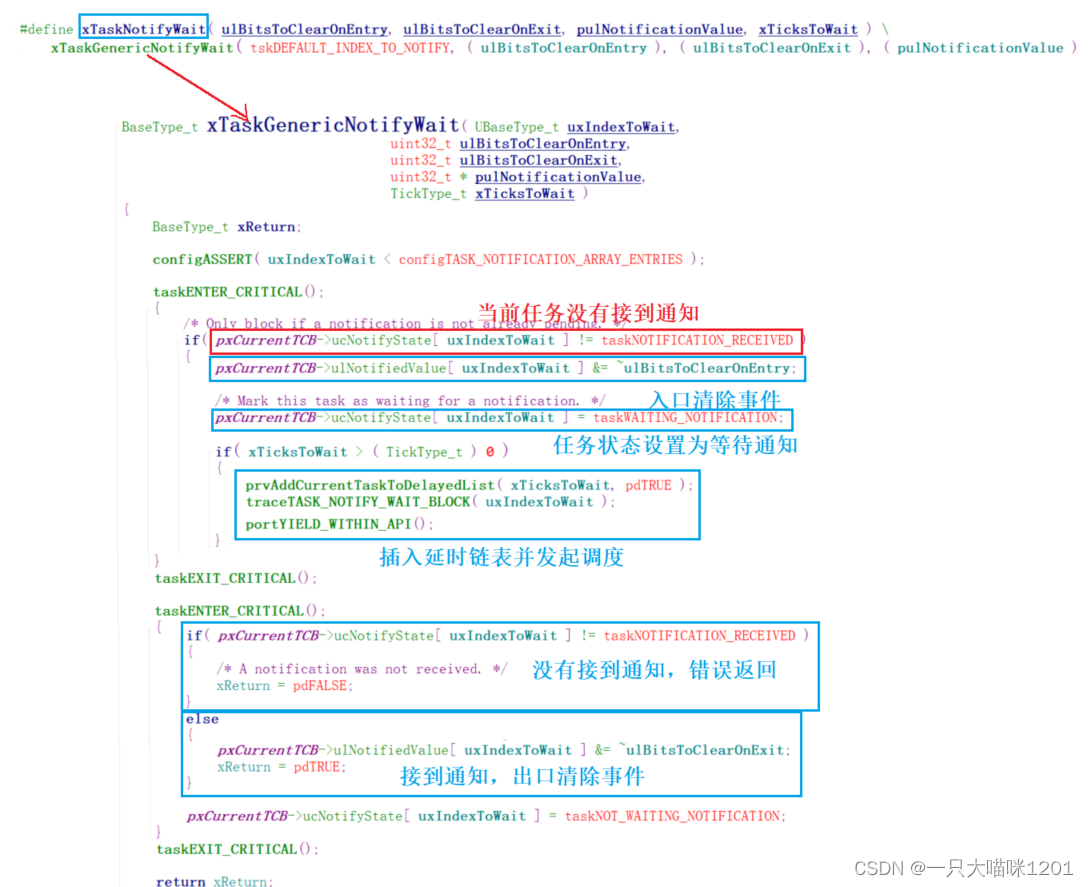
【RTOS学习】源码分析(信号量和互斥量 事件组 任务通知)
🐱作者:一只大喵咪1201 🐱专栏:《RTOS学习》 🔥格言:你只管努力,剩下的交给时间! 目录 🍓信号量和互斥量🍅创建🍅Take🍅Give &#x…...
 代码+解析)
1316:【例4.6】数的计数(Noip2001) 代码+解析
1316:【例4.6】数的计数(Noip2001) 【题目描述】 我们要求找出具有下列性质数的个数(包括输入的自然数n )。先输入一个自然数n(n≤1000),然后对此自然数按照如下方法进行处理:不作任何处理;在它的左边加上一…...

征集倒计时 | 2023年卓越影响力榜单-第四届中国产业创新奖报名即将截止
第四届「ISIG中国产业智能大会」将于2024年3月16日在上海举办。2024 ISIG 以“与科技共赢,与产业共进”为主题,共设立RPA超自动化、 低代码、AIGC大模型、流程挖掘四大主题峰会。届时,大会组委会将颁发2023年度卓越影响力榜单—第四届中国产业…...
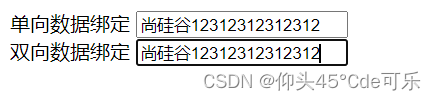
vue的语法模板与数据绑定的说明
vue的两大模板语法: 1.插值语法 2.指定语法 插值语法:{{}} 功能:用于解析标签体的内容 写法:{{xxx}},xxx是js表达式,且可以直接读取到data中的所有属性 指定语法: 功能:用于解析标签(包括:标签属性、标…...

VueCron使用方法
1)什么是vueCron Vue Cron 是基于 Vue.js 的定时任务管理组件,它提供了一种简单易用的方式来设定和管理定时任务。Vue Cron 提供了一个类似于 Linux crontab 的界面,用户可以通过它来创建、编辑和删除定时任务。 2)安装依赖及应…...

SpringBlade export-user SQL 注入漏洞复现
0x01 产品简介 SpringBlade 是一个由商业级项目升级优化而来的 SpringCloud 分布式微服务架构、SpringBoot 单体式微服务架构并存的综合型项目。 0x02 漏洞概述 SpringBlade v3.2.0 及之前版本框架后台 export-user 路径存在安全漏洞,攻击者利用该漏洞可通过组件customSqlS…...

结构体的一些补充知识
1、结构体后面分号前面的名字是什么意思。 在C中,结构体的定义格式为: struct <结构体名> {// 成员变量和成员函数 };在这个定义中,<结构体名>就是结构体的名称,而这个名称位于结构体定义的末尾,分号之前…...

20V升26V 600mA升压型LED驱动芯片,PWM调光芯片-AH1160
AH1160是一个功能强大的升压型LED驱动芯片,专为需要精确控制LED亮度的PWM调光应用而设计。它可将20V输入电压升压至26V,同时提供稳定的600mA电流输出,适用于各种LED照明设备。 芯片特点: 1. 输入电压范围:AH1160可在…...

如何在Go中制作HTTP服务器
引言 许多开发人员至少会花一些时间创建服务器,以便在互联网上分发内容。HTTP (Hypertext Transfer Protocol,超文本传输协议)提供了大部分这些内容,无论是请求一张猫的图片还是请求加载你正在阅读的教程。Go标准库为创建HTTP服务器以提供web内容或向这些服务器发出HTTP请求…...

Linux笔记---系统信息
🍎个人博客:个人主页 🏆个人专栏:Linux学习 ⛳️ 功不唐捐,玉汝于成 目录 前言 命令 1. uname - 显示系统信息 2. hostname - 显示或设置系统主机名 3. top - 显示系统资源使用情况 4. df - 显示磁盘空间使用情…...

最新版android stuido加上namespace
每个 Android 模块都有一个命名空间,此命名空间用作其生成的 命名空间由模块的 build.gradle 文件中的 namespace 属性定义,如以下代码段所示。namespace 最初会设为您在创建项目时选择的软件包名称。 Kotlin Groovy android {namespace "com.ex…...

Wireshark基础及捕获技巧
第一章:Wireshark基础及捕获技巧 1.1 Wireshark基础知识回顾 1.2 高级捕获技巧:过滤器和捕获选项 1.3 Wireshark与其他抓包工具的比较 第二章:网络协议分析 2.1 网络协议分析:TCP、UDP、ICMP等 2.2 高级协议分析:HTTP…...
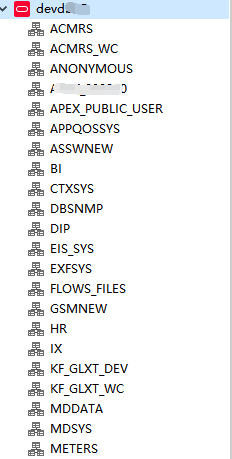
Windows下Navicat15.0连接Oracle11g报ORA-28547解决
目录 背景 一、相关环境 1、操作系统 2、Navicat版本 3、ORACLE连接 4、默认连接 二、问题分析 1、默认dll配置 三、修改配置 1、下载匹配的client 2、替换相应目录 总结 背景 最近在项目中需要使用Oracle数据库,当前很多应用系统的数据都存储在MySQL或者Pos…...

21 Vue3中使用v-for遍历对象数组
概述 使用v-for遍历对象数组在真实的开发中也属于非常常见的用法,需要重点掌握。 因为目前流行的是前后端分离开发,在前后端分离开发中,最常需要处理的就是对象数组类型的数据了。 比如,将员工信息渲染到表格中。 这节课我们就…...

深入理解Java自定义异常与全局异常处理 @RestControllerAdvice
异常主要是包括编译时的异常和运行时的异常。编译时的异常可以通过捕获异常获取,运行时候的异常主要是通过代码规范,或者测试。 Spring Boot提供了两种异常处理方式来统一处理和维护异常信息。 第一种方式是使用RestControllerAdvice注解与ExceptionHand…...
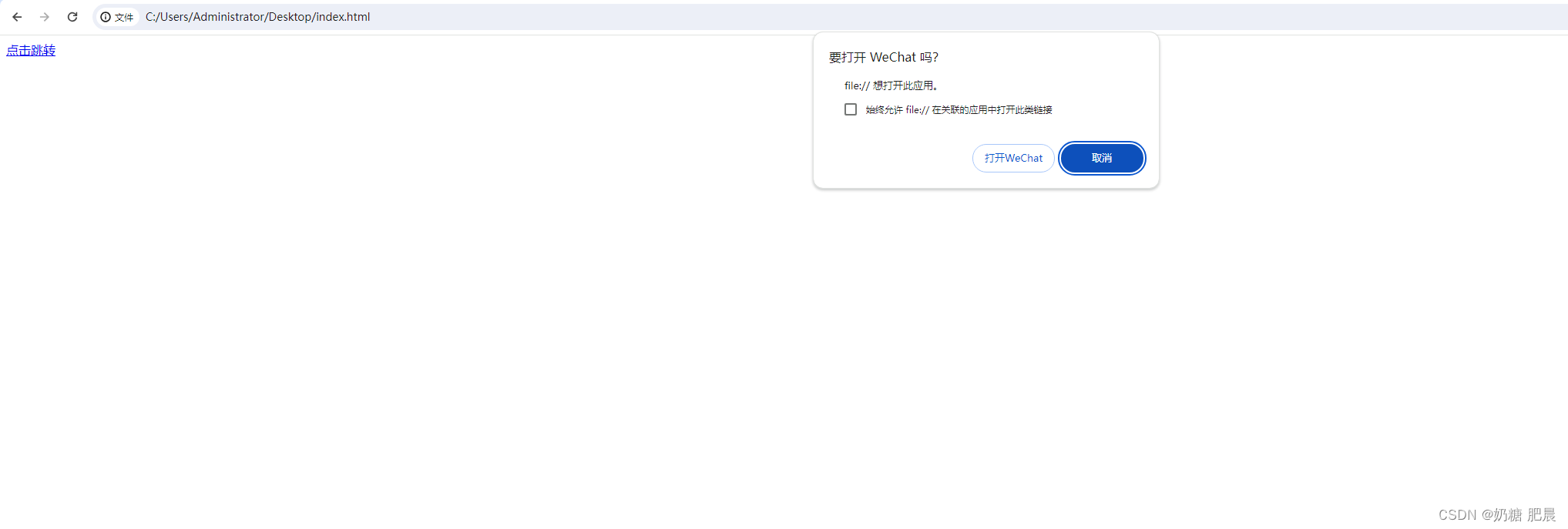
h5页面跳转微信小程序(最简单的方法|URL Scheme)
文章目录 导文实现获取 URL Scheme加密 URL Scheme获取方式拼接参数 明文 URL Scheme获取方式 实际项目展示:频率限制注意事项开放范围示例代码包 导文 H5页面跳转微信小程序的需求是普遍存在的。由于微信小程序是一种只能在微信内部访问的应用程序,而H5…...

智能优化算法应用:基于非洲秃鹫算法3D无线传感器网络(WSN)覆盖优化 - 附代码
智能优化算法应用:基于非洲秃鹫算法3D无线传感器网络(WSN)覆盖优化 - 附代码 文章目录 智能优化算法应用:基于非洲秃鹫算法3D无线传感器网络(WSN)覆盖优化 - 附代码1.无线传感网络节点模型2.覆盖数学模型及分析3.非洲秃鹫算法4.实验参数设定5.算法结果6.…...
持续集成交付CICD:Jenkins使用GitLab共享库实现前端项目镜像构建
目录 一、实验 1. GitLab修改项目文件与Harbor环境确认 2.Jenkins使用GitLab共享库实现前端项目镜像构建 3.优化CI流水线封装Harbor账户密码 4.Jenkins再次使用GitLab共享库实现前端项目镜像构建 一、实验 1. GitLab修改项目文件与Harbor环境确认 (1…...

SQL server 数据库 SQL语句高级用法
1、表的高级查询 use student select * from stuinfo1 -- 使用 in 的子查询 select * from stuinfo where stu_age in ( select stu_age from stuinfo where cla_id 12345 ) select * from stuinfo where stu_age in ( 19 , 20 , 21 , 25 , 23 , 1…...

Go语言屏幕自动化工具Rizzler:基于计算机视觉的RPA实践指南
1. 项目概述:一个能“读懂”你屏幕的智能助手最近在折腾一个挺有意思的开源项目,叫ghuntley/rizzler。乍一看这个名字,可能有点摸不着头脑,但如果你对自动化、RPA(机器人流程自动化)或者屏幕交互脚本感兴趣…...

003、TinyML与传统ML、边缘AI的区别与联系
TinyML与传统ML、边缘AI的区别与联系 从一次“模型跑死”的现场说起 上周帮一个做智能门锁的团队调模型,他们用MobileNetV2在STM32F4上做人脸检测。板子一上电,串口疯狂打印“HardFault”,复位后连RTOS都起不来。我一看代码,好家伙,直接把一个4MB的TFLite模型塞进了256K…...

OpenClaw 2.6.4 一键部署教程|零代码零基础无需命令快速上手
OpenClaw 是一款可以在本地运行的智能操作工具,能够通过自然语言指令完成电脑自动化操作,无需复杂配置即可快速使用。本文为 Windows 10/11 64 位系统提供完整的一键部署流程,帮助用户快速搭建属于自己的本地智能工具。 适配系统:…...

SITS 2026多目标优化落地指南:从梯度冲突到任务解耦,7步实现Pareto前沿精度提升23.6%
更多请点击: https://intelliparadigm.com 第一章:AI原生多任务学习:SITS 2026多目标优化实战技巧 在SITS 2026竞赛框架下,AI原生多任务学习(AI-Native Multi-Task Learning, AMTL)不再依赖传统单任务迁移…...
)
Google Maps路线响应延迟超800ms?Gemini边缘推理加速方案上线即降为112ms(附可复用TensorRT优化脚本)
更多请点击: https://intelliparadigm.com 第一章:Gemini Google Maps路线优化 Google Maps 与 Gemini 的深度集成正在重塑企业级物流与出行服务的智能边界。通过 Gemini 的多模态推理能力,开发者可将自然语言查询(如“避开施工路…...

从服务器到手机:手把手教你修改游戏客户端IP,让私服在手机上跑起来
移动游戏私服客户端IP修改实战指南 当你在服务器上成功部署了游戏私服后,最令人沮丧的莫过于发现手机上的官方客户端无法连接到你的私人服务器。这个看似简单的"最后一公里"问题,往往成为许多私服搭建者的拦路虎。本文将彻底解决这个痛点&…...


深度相机三剑客:TOF、双目与结构光的场景化选型指南
1. 深度相机技术入门:从原理到应用 第一次接触深度相机时,我被各种技术名词搞得晕头转向。TOF、双目、结构光听起来都很高大上,但到底有什么区别?经过多年项目实战,我发现这三种技术就像不同的"眼睛"&#…...

告别空转!用RT-Thread PM组件给你的IoT设备省电:从投票机制到外设管理的完整指南
告别空转!用RT-Thread PM组件给你的IoT设备省电:从投票机制到外设管理的完整指南 在电池供电的物联网设备开发中,功耗优化往往成为决定产品成败的关键因素。想象一下,一个部署在偏远地区的环境监测节点,如果因为功耗问…...

别再傻傻分不清了!MIPI DPHY和CPHY到底怎么选?从带宽、成本和PCB布线给你讲透
MIPI DPHY与CPHY工程选型实战指南:从理论到PCB布局的完整决策框架 在移动设备硬件设计中,MIPI接口的选择往往成为影响项目成败的关键决策点。当面对新一代图像传感器规格书上的DPHY/CPHY双模支持标识时,资深工程师的眉头总会不自觉地皱起——…...