论文阅读:Long-Term Visual Simultaneous Localization and Mapping
论文摘要指出,为了在长期变化的环境中准确进行定位,提出了一种新型的长期视觉SLAM(同步定位与地图构建)系统,该系统具备地图预测和动态物体移除功能。系统首先设计了一个高效的视觉点云匹配算法,将2D像素信息和3D体素信息有效融合。其次,使用贝叶斯持久性过滤器对地图点进行静态、半静态和动态分类,并移除动态点以消除其影响。通过对半静态地图点的时间序列建模,可以获得全局预测地图。最后,将预测的全局地图整合到先进的SLAM方法中,从而实现了一种适用于长期动态环境的高效视觉SLAM系统。通过在室内环境中对轮椅机器人进行数月的广泛实验,结果表明该方法在地图预测精度和定位性能方面优于现有方法。
论文中实现的算法过程主要包括以下几个步骤:
-
视觉点云匹配算法:设计一个算法来高效地融合2D像素信息和3D体素信息。
-
地图点分类:使用贝叶斯持久性过滤器(BPF)将每个地图点分类为静态、半静态和动态。
-
动态地图点移除:移除动态地图点以消除它们对地图的影响。
-
全局预测地图:通过对半静态地图点的时间序列建模来获得一个全局预测地图。
-
系统集成:将预测的全局地图整合到现有的SLAM方法中,以提高长期动态环境下视觉SLAM系统的效率。
-
实验验证:通过在室内环境中对轮椅机器人进行数月的实验,验证了方法的有效性,并展示了该方法在地图预测精度和定位性能方面相较现有方法的优越性。
此外,论文还提出了一种基于长短期指数模型的预测方法,以更准确地预测半静态地图点的未来状态,并定义了一个新的3D地图点描述符,用于在不同时间序列的地图中匹配地图点。通过贝叶斯持久性过滤和生存分析,可以计算每个地图点在时间序列中的生存函数,并据此预测其未来状态。
根据文中描述,动态地图点的移除过程如下:
-
使用贝叶斯持久性过滤器(Bayesian Persistence Filter,BPF)对每个地图点进行分类,将它们分为静态、半静态和动态。
-
识别出的动态地图点通常是在单次机器人遍历的短时间内出现并快速移动的,例如周围移动的人类。
-
动态地图点的移除是为了消除这些点对地图的影响,这样做可以通过多次访问同一地点来检测到并移除这些点。
-
文章中提出的系统使用BPF来移除环境中的动态地图点。首先,通过追踪每个地图点的观察情况来准确使用持久性过滤器。
-
在追踪观察模块中,可以追踪相应地图点的所有观察情况来更新持久性过滤器。当新的帧到达时,将当前帧中的关键点与候选地图点匹配。
-
如果地图点匹配,则在此时间戳中被定义为存活,并将“命中观察”分配给持久性过滤器。否则,地图点被定义为在此时间戳中死亡,并将“未命中观察”分配给持久性过滤器。
-
对于持久性概率低于某一阈值的地图点,将其视为动态地图点并从地图中移除。
-
如果一个地图点在多个帧中都没有被观察到,就不能立即定义为动态地图点。每个地图点与观察它的关键帧中的一些关键点相对应。当移除一个地图点时,将相应的关键点设置为“不可用”。
通过以上步骤,系统能够有效地移除影响地图准确性的动态地图点,从而提高了SLAM系统在长期动态环境下的表现。
论文中将预测的全局地图整合到现有SLAM方法中的过程主要包括以下几个步骤:
-
局部地图构建:使用局部地图构建线程获取环境的精确地图。
-
地图整合:依照ORB-SLAM3方法,将局部地图合并入全局地图中。这一步骤确保了在动态环境中对地图进行持续更新。
-
重定位算法:使用重定位算法来获取对应的光度信息,并利用迭代最近点(Iterative Closest Point,ICP)算法得到匹配的地图点云,这是为了在不同的会话之间获取准确的机器人初始位置。
-
定位性能评估:通过在不同速度下收集的测试数据集来评估定位性能。这些数据集在Github上开源,以便社区使用和验证。
-
真实世界数据集的地面真实值获取:使用3D激光雷达和激光雷达惯性里程计平滑和映射(LIO-SAM)方法获取。
通过上述步骤,研究者们成功地将时间序列建模和全局地图预测整合到了现有的SLAM框架中,提高了在长期动态环境下的定位和地图构建性能。实验结果表明,该系统在定位准确性、鲁棒性和内存消耗方面都达到了较好的效果。
在论文中,评定算法性能的方法包括以下几个主要方面:
-
绝对轨迹误差(ATE): ATE用于评估算法预测的轨迹和实际轨迹之间的差异。这是一个常用的衡量SLAM系统定位准确性的指标。
-
动态环境下的性能: 评估算法在处理动态环境,尤其是在移动物体和长期环境变化方面的能力。
-
内存消耗: 衡量算法运行时对内存的需求。对于长期运行的系统,内存效率是一个重要指标。
-
实验验证: 通过在不同环境和条件下进行的实验来评估算法的性能。这些实验通常包括在真实世界数据集和模拟数据集上的测试。
-
与现有方法的比较: 将所提算法的性能与其他现有SLAM方法进行比较,以展示其相对优势和缺点。
-
正确率(CR): 评估系统在整个数据期间的稳健性。这是基于每个估计位姿的绝对轨迹误差和绝对方向误差来计算的。
通过这些评估方法,作者展示了他们提出的系统在长期动态环境下的有效性和优势,特别是在地图预测精度、定位性能和对动态物体处理方面。
论文的主要创新点包括:
-
长期视觉SLAM系统:提出了一种结合贝叶斯持久性过滤器和全局地图预测的长期视觉SLAM系统,适用于长时间、动态变化的环境中。
-
贝叶斯持久性过滤器(BPF):利用BPF对地图点进行静态、半静态和动态分类,以及有效地移除动态地图点,减少它们对地图准确性的影响。
-
全局地图预测:通过对半静态地图点的时间序列建模,实现了对环境的长期、动态变化的有效预测。
-
融合视觉点云匹配算法:开发了一种新型的视觉点云匹配算法,结合2D像素信息和3D体素信息,以提高匹配的精确度。
-
实验验证:通过在实际室内环境中对轮椅机器人进行长期实验,证明了方法的有效性,并与现有方法进行了比较,展示了其在地图预测精度和定位性能方面的优势。
这些创新点表明了该研究在长期动态环境中视觉SLAM系统的发展方面取得了重要进步。
在论文中,作者将提出的算法与以下现有的SLAM方法进行了比较:
-
ORB-SLAM2:一种广泛使用的基于特征的SLAM方法,适用于单目、双目和RGB-D相机。
-
ORB-SLAM3:ORB-SLAM的最新版本,支持视觉、视觉-惯性和多地图SLAM。
-
DVO SLAM:基于稠密视觉里程计(Dense Visual Odometry)的SLAM方法。
-
Depth-Edge SLAM:一种利用深度和边缘信息进行SLAM的方法。
-
DynaSLAM:针对动态环境设计的一种SLAM系统,能够在存在动态物体的环境中进行地图构建和定位。
-
其他变体:包括没有运动物体移除(MPR)、没有全局地图预测(GMP)、没有动态物体检测(OD)、没有3D匹配等方法的LTVS-BPF变体。
这些对比方法覆盖了不同类型的SLAM系统,包括基于特征、基于深度、以及针对动态环境的方法。通过与这些方法的比较,论文能够展示所提出系统在不同情境下的性能优势和适用性。
相关文章:

论文阅读:Long-Term Visual Simultaneous Localization and Mapping
论文摘要指出,为了在长期变化的环境中准确进行定位,提出了一种新型的长期视觉SLAM(同步定位与地图构建)系统,该系统具备地图预测和动态物体移除功能。系统首先设计了一个高效的视觉点云匹配算法,将2D像素信…...
Docker 学习总结(80)—— 轻松驾驭容器,玩转 LazyDocker
前言 LazyDocker 是一个用户友好的命令行工具,简化了 Docker 的管理。它能够通过单一命令执行常见的 Docker 任务,如启动、停止、重启和移除容器。LazyDocker 还能轻松查看日志、清理未使用的容器和镜像,并自定义指标。 简绍 LazyDocker 是一个用户友好的 CLI 工具,可以轻…...
- MediaCodecList)
Android 13 - Media框架(24)- MediaCodecList
这一节我们要了解 MediaCodecList 中的信息是如何加载的,以及这些信息是如何使用到的。 // static sp<IMediaCodecList> MediaCodecList::getLocalInstance() {Mutex::Autolock autoLock(sInitMutex);if (sCodecList nullptr) {MediaCodecList *codecList n…...

【稳定检索|投稿优惠】2024年交通运输与能源动力国际学术会议(IACTEP 2024)
2024年交通运输与能源动力国际学术会议(IACTEP 2024) 2024 International Academic Conference on Transportation and Energy Power(IACTEP) 一、【会议简介】 2024年交通运输与能源动力国际学术会议(IACTEP 2024)将在美丽的三亚盛大启幕。本次会议将聚焦交通运输与能源动力等…...
React学习计划-React16--React基础(三)收集表单数据、高阶函数柯里化、类的复习
1. 收集表单数据 包含表单的组件分类 受控组件——页面中所有输入类的DOM,随着输入,把值存维护在状态里,需要用的时候去状态里取值(推荐,避免了过渡使用ref)非受控组件——页面中所有输入类的DOM,现用现取…...
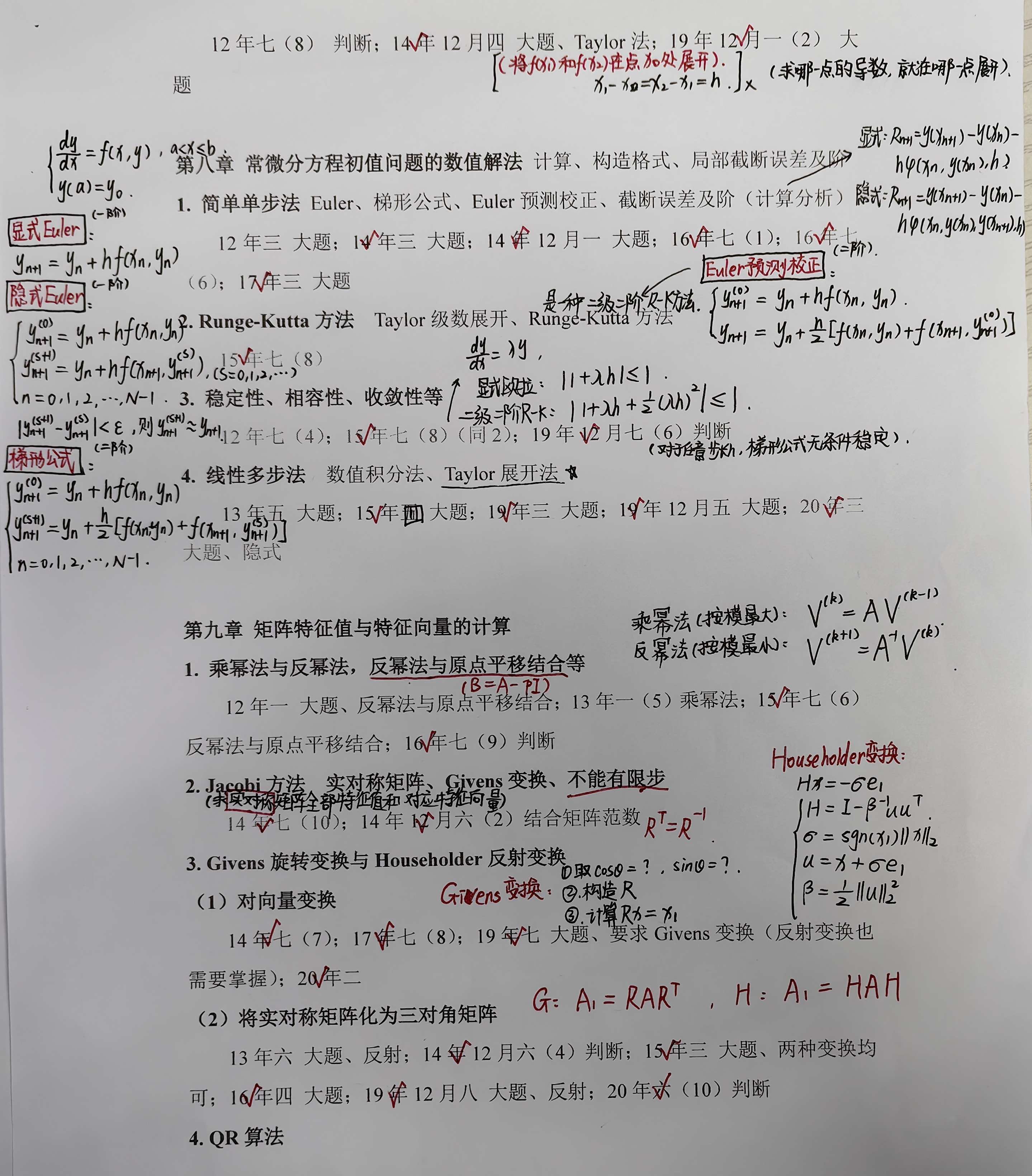
研究生课程 |《数值分析》复习
搭配往年真题册食用最佳。...

55 回溯算法解黄金矿工问题
问题描述:你要开发一座金矿,地质学家已经探明了这座金矿中的资源分布,并用大小为m*n的网格grid进行了标注,每个单元格中的整数就表示这一单元格中的黄金数量;如果单元格是空的,那么就是0,为了使…...
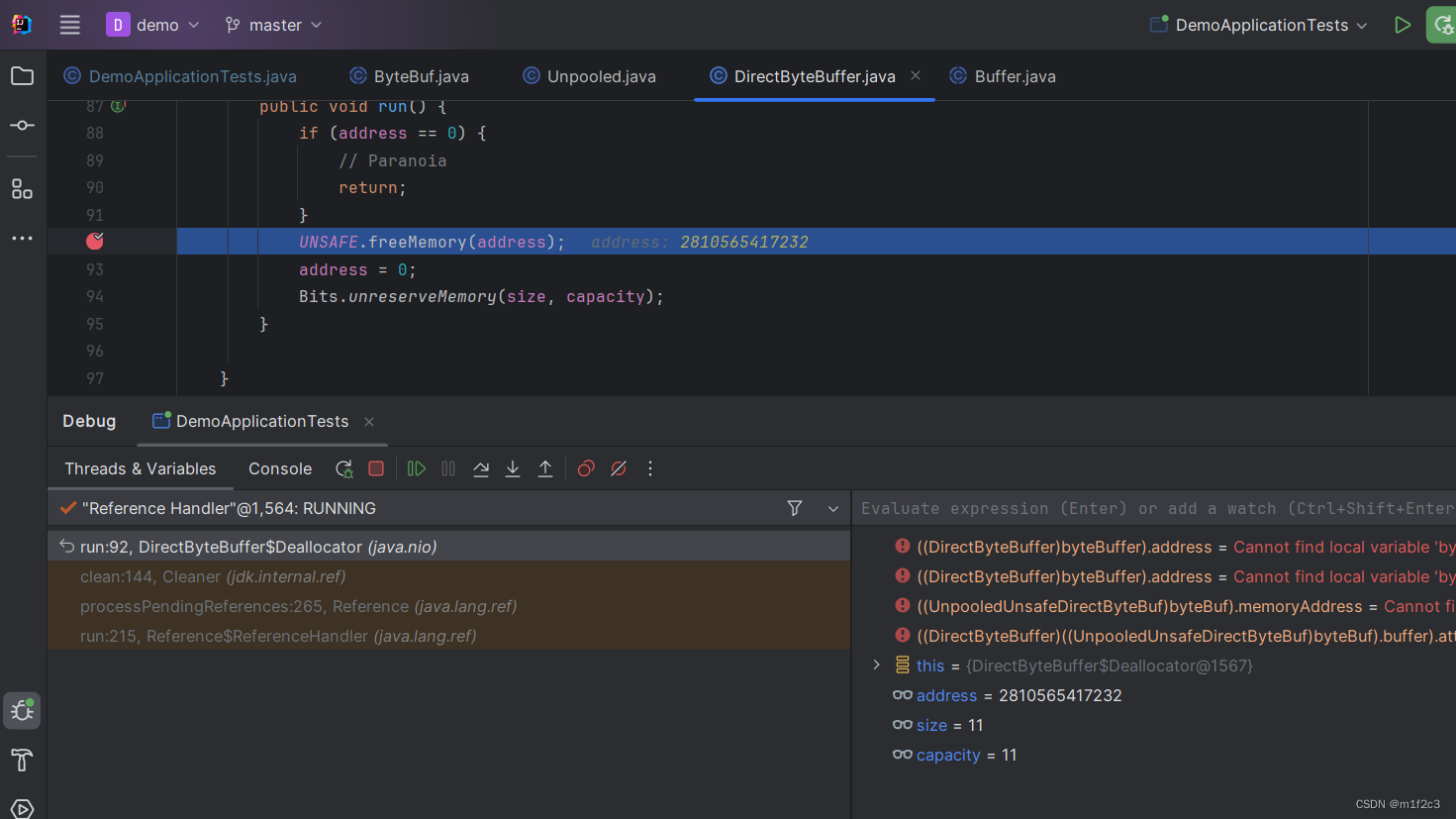
[笔记]ByteBuffer垃圾回收
参考:https://blog.csdn.net/lom9357bye/article/details/133702169 public static void main(String[] args) throws Throwable {List<Object> list new ArrayList<>();Thread thread new Thread(() -> {ByteBuffer byteBuffer ByteBuffer.alloc…...

c++ opencv中unsigned char *、Mat、Qimage互相转换
unsigned char * 转Mat unsinged char * data img.data; Mat mat (h,w,cv_8UC3,data,0);void * 转Qimage uchar * bit (uchar*)pRknnInputData; QImage image QImage(bit, 2048,1536, QImage::Format_RGB888);qimage转Mat QImage image QImage (MODEL_INPUT_WIDTH_SIZE,MODE…...
法线贴图实现衣服上皱褶特效
在线工具推荐: 3D数字孪生场景编辑器 - GLTF/GLB材质纹理编辑器 - 3D模型在线转换 - Three.js AI自动纹理开发包 - YOLO 虚幻合成数据生成器 - 三维模型预览图生成器 - 3D模型语义搜索引擎 法线贴图在3D建模中扮演着重要的角色,它通过模拟表面的微…...
2017年第六届数学建模国际赛小美赛B题电子邮件中的笔迹分析解题全过程文档及程序
2017年第六届数学建模国际赛小美赛 B题 电子邮件中的笔迹分析 原题再现: 笔迹分析是一种非常特殊的调查形式,用于将人们与书面证据联系起来。在法庭或刑事调查中,通常要求笔迹鉴定人确认笔迹样本是否来自特定的人。由于许多语言证据出现在电…...

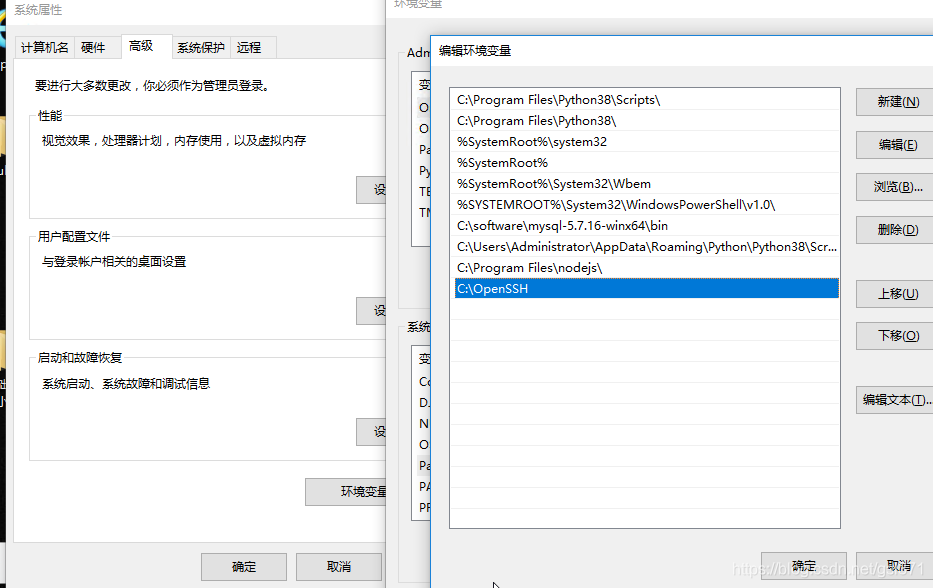
CentOS安装Python解释,CentOS设置python虚拟环境,linux设置python虚拟环境
一、安装python解释器 1、创建解释器安装的目录:/usr/local/python39 cd /usr/local mkdir python39 2、下载依赖 yum -y install zlib-devel bzip2-devel openssl-devel ncurses-devel sqlite-devel readline-devel tk-devel gcc make libffi-devel xz-devel …...
在线智能防雷监控(检测)系统应用方案
在线智能防雷监控系统是一种利用现代信息技术,对防雷设施的运行状态进行实时监测、管理和控制的系统,它可以有效提高防雷保护的安全性、可靠性和智能化程度,降低运维成本和风险,为用户提供全方位的防雷解决方案。 在线智能防雷监控…...

flutter + firebase 云消息通知教程 (android-安卓、ios-苹果)
如果能看到这篇文章的 一定已经对手机端的 消息推送通知 有了一定了解。 国内安卓厂商这里不提都有自己的FCM 可自行查找。(国内因无法科学原因 ,不能使用谷歌服务)只说海外的。 目前 adnroid 和 ios 推送消息分别叫 FCM 和 APNs。这里通过…...

2024年PMP考试新考纲-PMBOK第七版-项目管理原则真题解析
从战争中学习战争。对于参加2024年PMP考试的小伙伴来说,最有效的学习方式是这样地:①阅读了教材(PMBOK6、7和敏捷),了解基本概念;②反复刷近期的PMP考试真题,查漏补缺。 为此,华研荟…...
vscode开发python环境配置
前言 vscode作为一款好用的轻量级代码编辑器,不仅支持代码调试,而且还有丰富的插件库,可以说是免费好用,对于初学者来说用来写写python是再合适不过了。下面就推荐几款个人觉得还不错的插件,希望可以帮助大家更好地写…...

数据库客户案例:每个物种都需要一个数据库!
1、GERDH——花卉多组学数据库 项目名称:GERDH:花卉多组学数据库 链接地址:https://dphdatabase.com 项目描述:GERDH包含了来自150多种园艺花卉植物种质的 12961个观赏植物。将不同花卉植物转录组学、表观组学等数据进行比较&am…...
数据分析思维导图
参考: https://zhuanlan.zhihu.com/p/567761684?utm_id0 1、数据分析步骤地图 2、数据分析基础知识地图 3、数据分析技术知识地图 4、数据分析业务流程 5、数据分析师能力体系 6、数据分析思路体系 7、电商数据分析核心主题 8、数据科学技能书知识地图 9、数据挖掘…...
网络基础【网线的制作、OSI七层模型、集线器、交换机介绍、路由器的配置】
目录 一.网线的制作 1.1.网线的标准 1.2.水晶头的做法 二.OSI七层模型、集线器、交换机介绍 集线器(Hub): 交换机(Switch): 三.路由器的配置 3.1.使用 3.2.常用的功能介绍 1、如何管理路由器 2、家…...
C++中的继承(二)
文章目录 前言多继承虚继承虚继承的底层组合 前言 上一篇文章我们C的正常继承其实已经讲完了,但是后面还有一个大坑。 实际当中继承有单继承和多继承。 单继承就是直接继承一个类。 只有一个直接父类的就叫做单继承。 如果是单继承那就比较简单。 现实世界除了有…...

深入Next.js App Router Playground:官方前沿特性实战指南
1. 项目定位与核心价值如果你和我一样,是个对 Next.js 新特性充满好奇,总想第一时间上手把玩的前端开发者,那么 Vercel 官方开源的next-app-router-playground项目,绝对是你不能错过的“宝藏沙盒”。这可不是一个普通的示例项目&a…...

Qt WebEngine实战避坑:证书管理、代理设置与高DPI适配那些事儿
Qt WebEngine实战避坑指南:证书管理、代理配置与高DPI适配深度解析 在跨平台桌面应用开发领域,Qt WebEngine作为Chromium引擎的封装实现,为开发者提供了强大的Web内容嵌入能力。然而在实际项目落地过程中,开发者常会遇到三类典型问…...

如何5分钟掌握Jump:从安装到高效使用的完整教程
如何5分钟掌握Jump:从安装到高效使用的完整教程 【免费下载链接】jump Jump helps you navigate faster by learning your habits. ✌️ 项目地址: https://gitcode.com/gh_mirrors/ju/jump Jump是一款能够通过学习用户习惯来加速导航的命令行工具࿰…...

颠覆性网络拓扑可视化:基于Vue+SVG的一站式轻量级解决方案
颠覆性网络拓扑可视化:基于VueSVG的一站式轻量级解决方案 【免费下载链接】easy-topo vuesvgelement-ui 快捷画出网络拓扑图 项目地址: https://gitcode.com/gh_mirrors/ea/easy-topo 在复杂的网络架构设计和运维管理中,网络工程师和开发人员经常…...

基于Python的自动化数据简报生成:从模板驱动到部署实践
1. 项目概述:数据简报的自动化生成利器如果你也和我一样,每天需要从一堆数据库、日志文件和API接口里捞出数据,然后吭哧吭哧地整理成PPT或者Word报告,那你一定懂这种重复劳动的痛苦。数据本身就在那里,但把它们变成老板…...

利用Taotoken的多模型能力为AIGC应用构建弹性后备方案
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 利用Taotoken的多模型能力为AIGC应用构建弹性后备方案 对于开发图像生成、文案创作等AIGC应用的团队而言,服务连续性至…...

STM32 PID温度控制系统:实现±0.5°C高精度控制的完整指南
STM32 PID温度控制系统:实现0.5C高精度控制的完整指南 【免费下载链接】STM32 项目地址: https://gitcode.com/gh_mirrors/stm322/STM32 你是否曾面临温度控制系统的精度不足、响应迟缓或稳定性差的困扰?在工业自动化、实验室研究和智能家居领域…...

告别“对方已撤回“!PC版微信QQ防撤回补丁终极指南
告别"对方已撤回"!PC版微信QQ防撤回补丁终极指南 【免费下载链接】RevokeMsgPatcher :trollface: A hex editor for WeChat/QQ/TIM - PC版微信/QQ/TIM防撤回补丁(我已经看到了,撤回也没用了) 项目地址: https://gitco…...

青龙脚本自动化:五款实用脚本助你轻松管理日常任务
青龙脚本自动化:五款实用脚本助你轻松管理日常任务 【免费下载链接】huajiScript 滑稽の青龙脚本库 项目地址: https://gitcode.com/gh_mirrors/hu/huajiScript 在当今快节奏的数字时代,自动化工具已成为提升效率的必备利器。如果你正在寻找一款能…...

别再让数码管显示拖垮你的51单片机!频率计项目中CPU时间分配的优化实战
51单片机频率计项目中的CPU时间优化艺术:从阻塞式刷新到状态机重构 当你在深夜调试51单片机频率计项目时,是否经历过这样的绝望时刻——测量数据明明准确,但数码管显示却闪烁不定;或者当输入信号频率升高时,整个系统突…...