Pooling方法总结(语音识别)
Pooling layer将变长的frame-level features转换为一个定长的向量。

1. Statistics Pooling
链接:http://danielpovey.com/files/2017_interspeech_embeddings.pdf
The default pooling method for x-vector is statistics pooling.
The statistics pooling layer calculates the mean vector µ as well as the second-order statistics as the standard deviation vector σ over frame-level features ht (t = 1, · · · , T ).
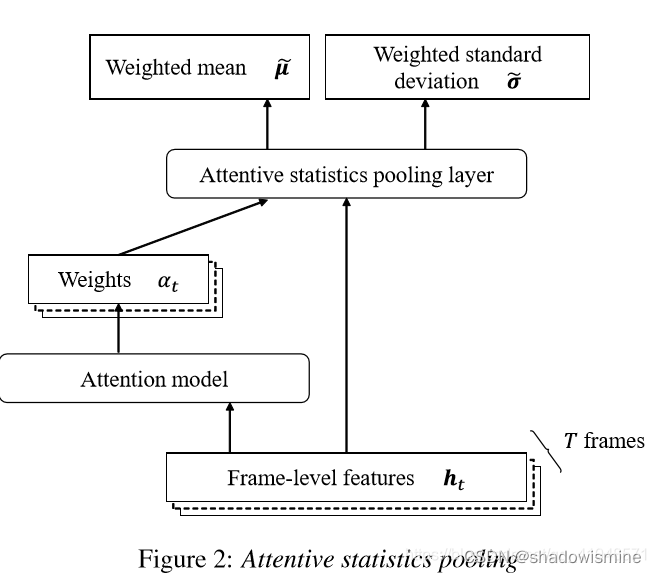
2. Attentive Statistics Pooling
链接:https://arxiv.org/pdf/1803.10963.pdf
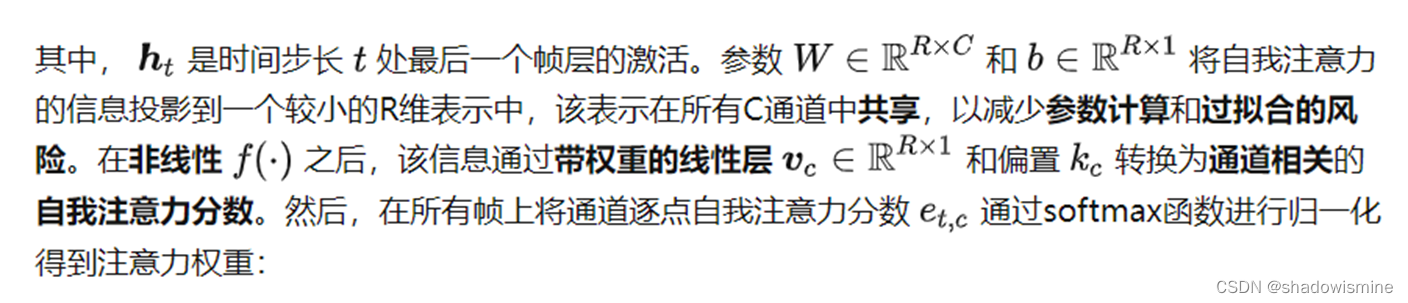
在一段话中,往往某些帧的帧级特征比其他帧的特征更为独特重要,因此使用attention赋予每帧feature不同的权值。

其中f(.)代表非线性变换,如tanh or ReLU function。
最后将每帧特征加劝求和

3. Self-Attentive pooling
链接:https://danielpovey.com/files/2018_interspeech_xvector_attention.pdf
4. Self Multi-Head Attention pooling
论文:Multi-Resolution Multi-Head Attention in Deep Speaker Embedding | IEEE Conference Publication | IEEE Xplore
5. NetVLAD
论文:
https://arxiv.org/pdf/1902.10107.pdf
https://arxiv.org/pdf/1511.07247.pdf
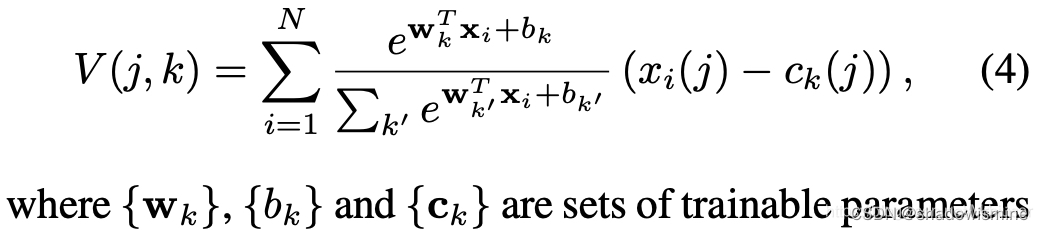
更详细的解释参考:从VLAD到NetVLAD,再到NeXtVlad - 知乎
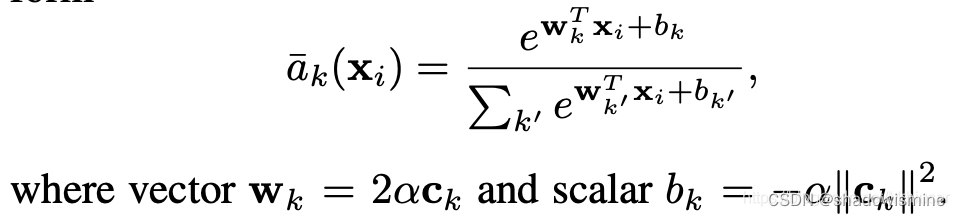
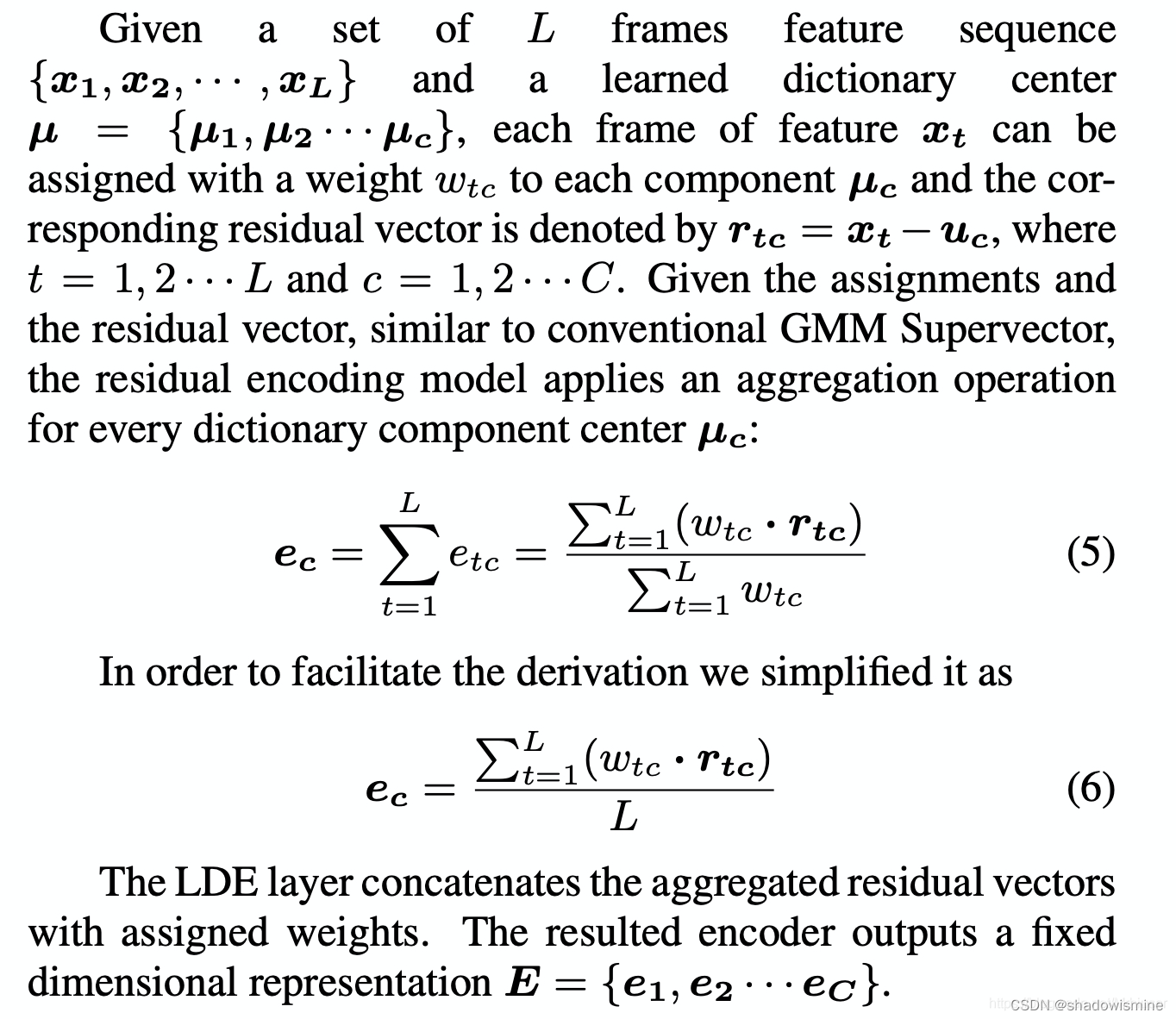
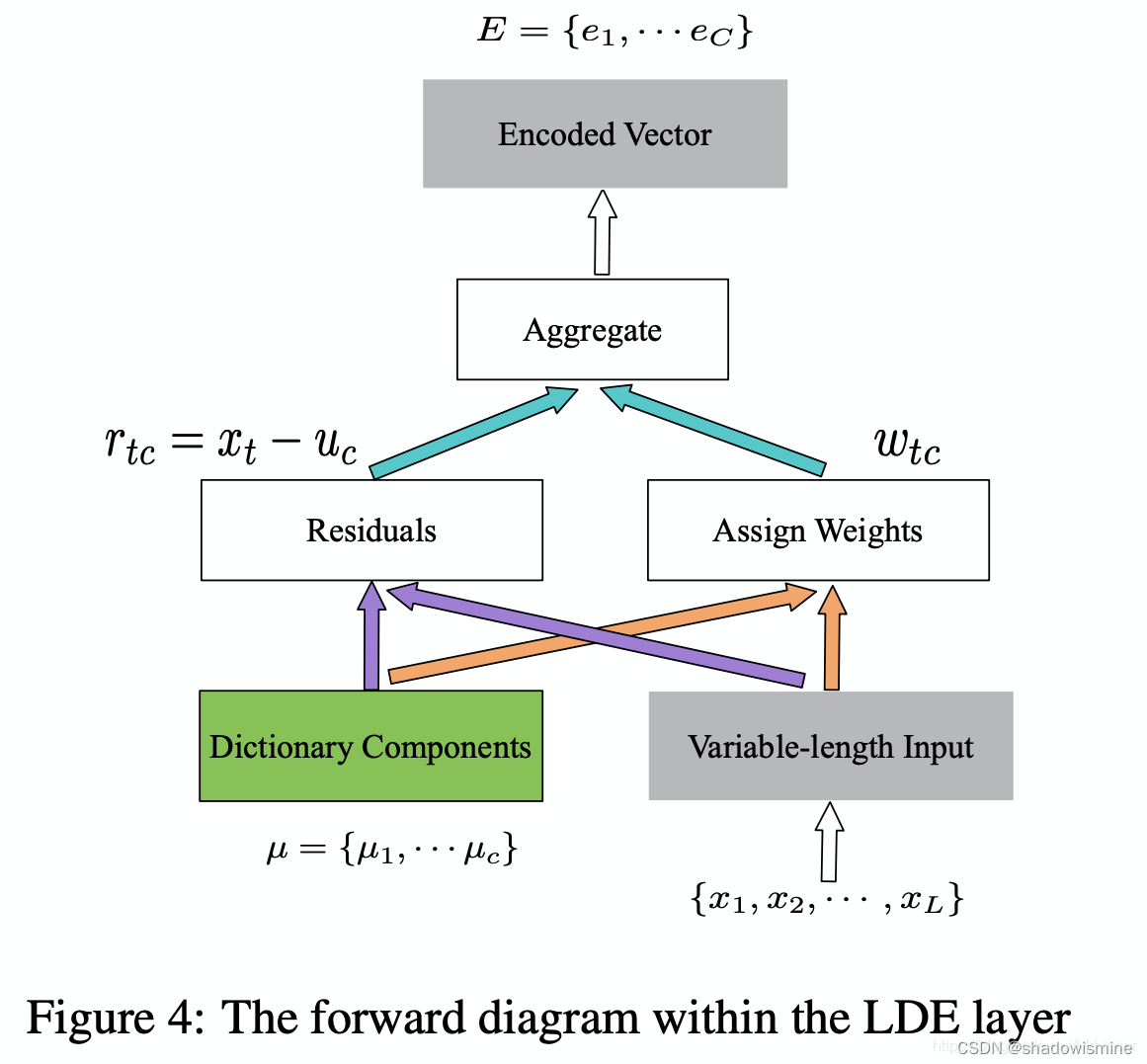
6. Learnable Dictionary Encoding (LDE)
论文:https://arxiv.org/pdf/1804.05160.pdf
we introduce two groups of learnable parameters. One is the dictionary component center, noted as µ = {µ1, µ2 · · · µc}. The other one is assigned weights, noted as w.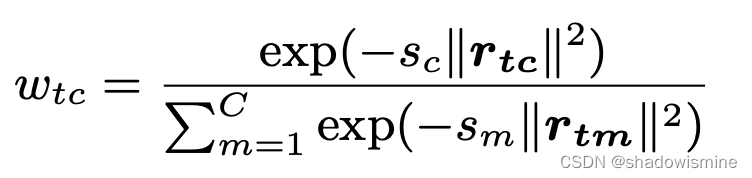
where the smoothing factor for each dictionary center
is learnable.
7. Attentive Bilinear Pooling (ABP) - Interspeech 2020
论文:https://www.isca-speech.org/archive/Interspeech_2020/pdfs/1922.pdf
Let be the frame-level feature map captured by the hidden layer below the self-attention layer, where L and D are the number of frames and feature dimension respectively. Then the attention map
can be obtained by feeding H into a 1×1 convolutional layer followed by softmax non-linear activation, where K is the number of attention heads. The 1st-order and 2nd-order attentive statistics of H, denoted by µ and
, can be computed similar as crosslayer bilinear pooling, which is

where T1(x) is the operation of reshaping x into a vector, and T2(x) includes a signed square-root step and a L2- normalization step. The output of ABP is the concatenation of µ and
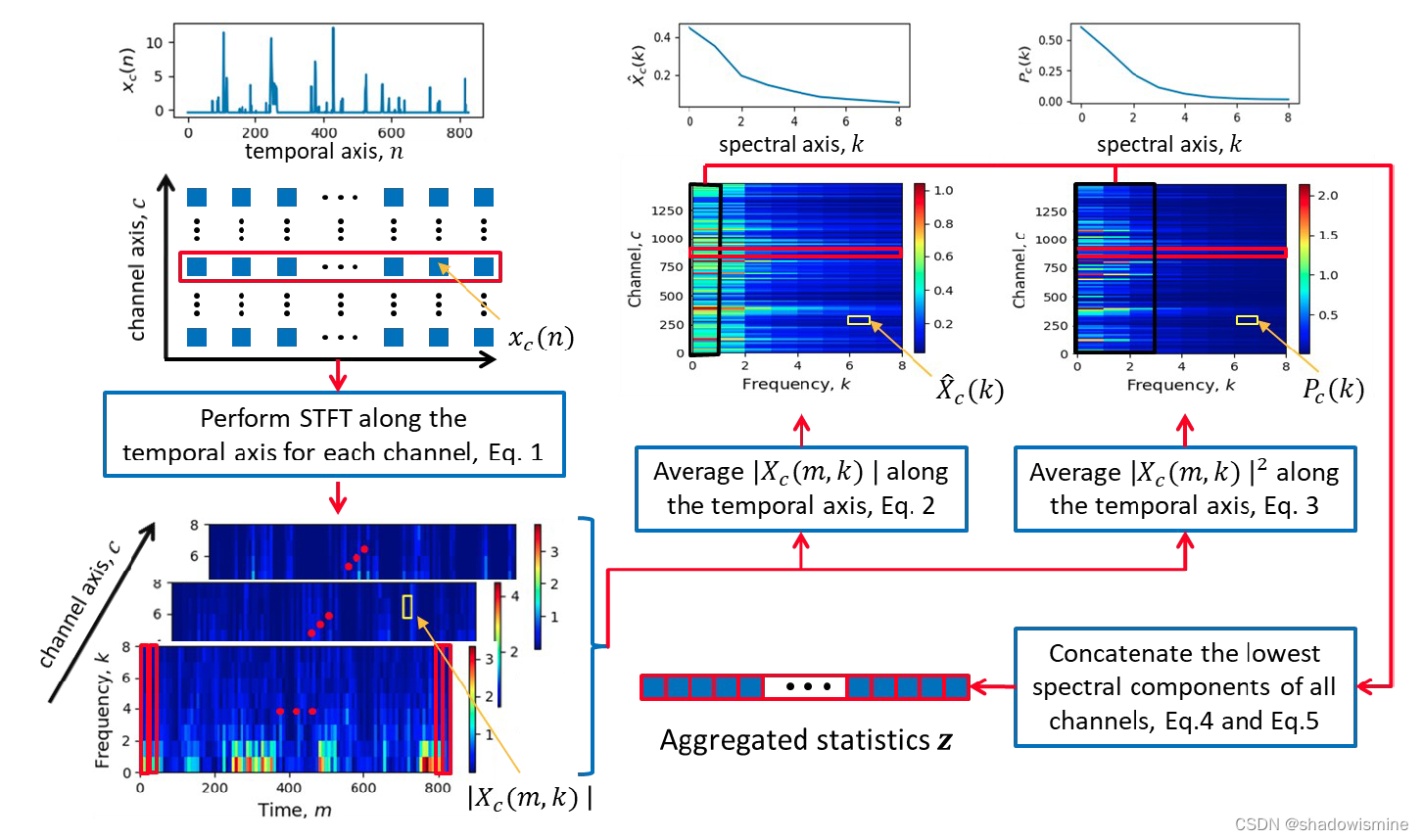
8. Short-time Spectral Pooling (STSP) - ICASSP 2021
https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=9414094&tag=1![]() https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=9414094&tag=1From a Fourier perspective, statistics pooling only exploits the DC (zero-frequency) components in the spectral domain, whereas STSP incorporates more spectral components besides the DC ones during aggregation and is able to retain richer speaker information.
https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=9414094&tag=1From a Fourier perspective, statistics pooling only exploits the DC (zero-frequency) components in the spectral domain, whereas STSP incorporates more spectral components besides the DC ones during aggregation and is able to retain richer speaker information.
1. 将卷积层提取到的特征做STFT(Short Time Fourier Transorm),每一个channel得到一个二维频谱图。
2. 计算averaged spectral array

3. 计算second-order spectral statistics

4. 将两个特征进行拼接(C is the number of channels)

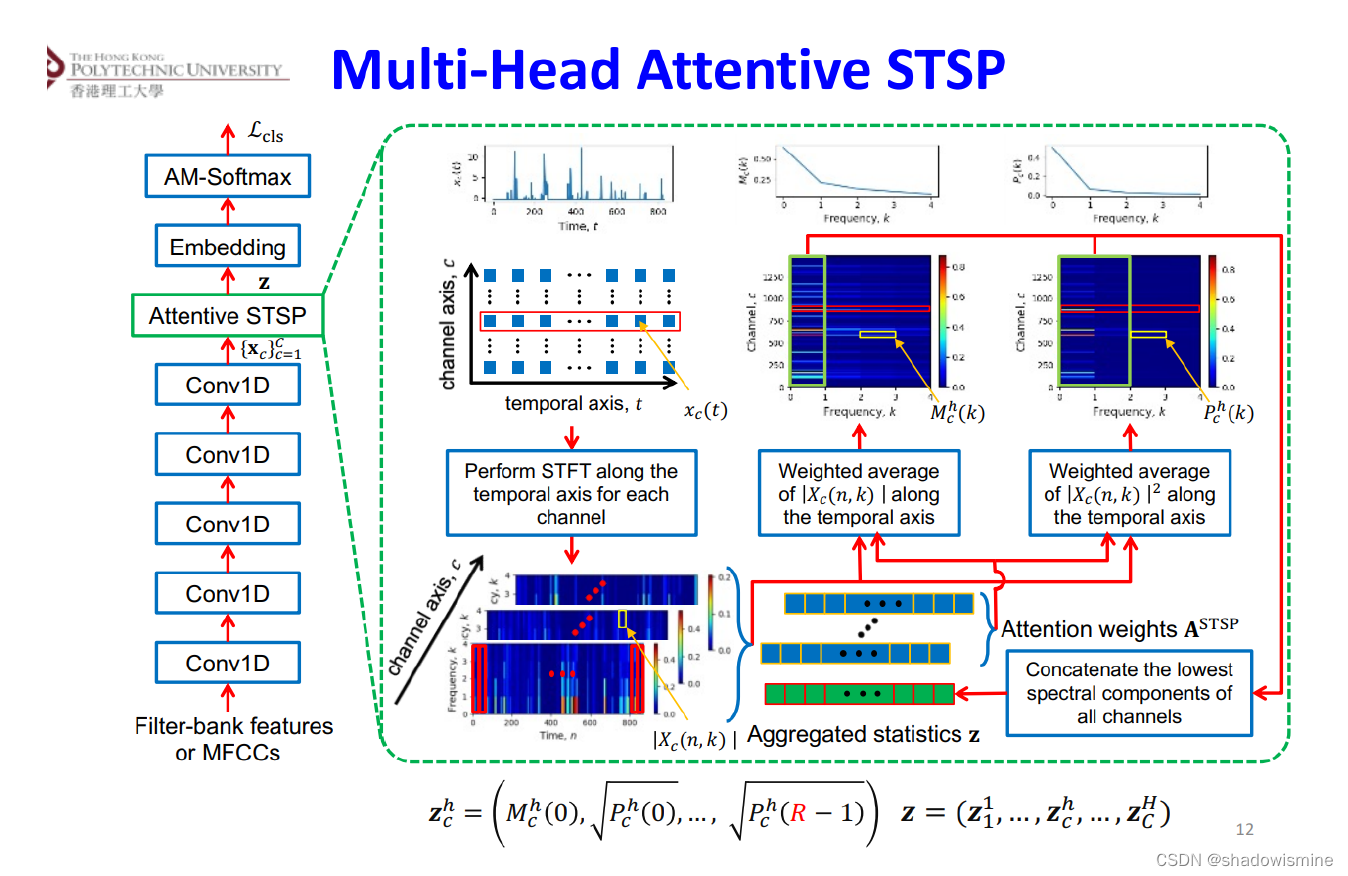
9. Multi-head attentive STSP (IEEE TRANS. ON AUDIO, SPEECH, AND LANGUAGE PROCESSING 2022)
One limitation of STSP is that the brute average of the spectrograms along the temporal axis ignores the importance of individual windowed segments when computing the spectral representations. In other words, all segments in a specific spectrogram were treated with equal importance.
相关文章:
Pooling方法总结(语音识别)
Pooling layer将变长的frame-level features转换为一个定长的向量。 1. Statistics Pooling 链接:http://danielpovey.com/files/2017_interspeech_embeddings.pdf The default pooling method for x-vector is statistics pooling. The statistics pooling laye…...
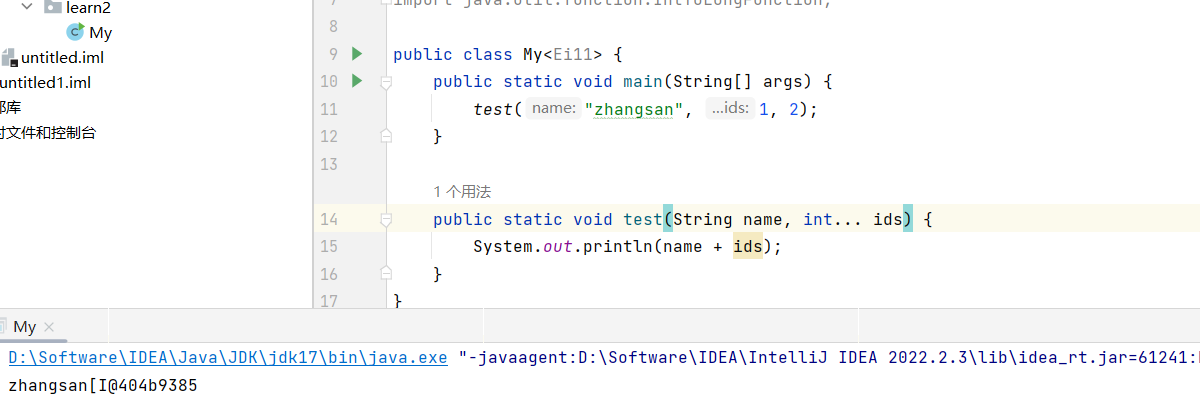
Java可变参数(学习推荐版,通俗易懂)
定义 可变参数本质还是一个数组 示例代码 注意事项 1.形参列表中,可变参数只能有一个 2.可变参数必须放在形参列表的最后面 注意是最后面。 name也可以为int类型...
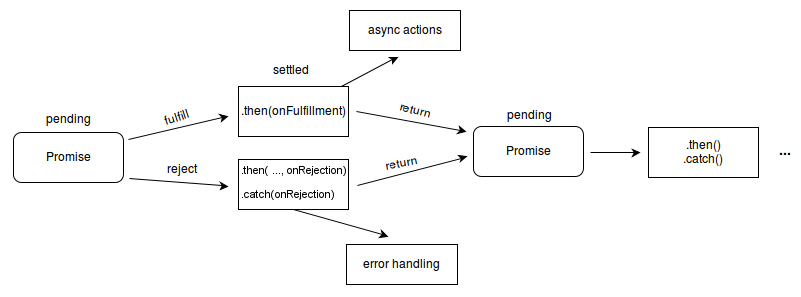
异步编程Promise
文章目录 前言一、关于 Promise 的理解与使用1.相关知识补充区别实例对象和函数对象同步回调异步回调Js中的错误(error)和错误处理 2.promise是什么 二、Promise 原理三、Promise 封装 Ajax四、async 与 await总结 前言 在项目中,promise的使…...

Centos上的默认文本编辑器vi的操作方法积累
打开一个文本后,常见的操作方法积累如下: 001-进入或退出插入模式的方法 按下 i 进入插入模式。 按下 Esc 退出插入模式。 002-进入命令模式的方法: 按下 Esc 退出插入模式,然后输入冒号:进入命令模式。 003-退出vi编辑器的方…...

海康rtsp拉流,rtmp推流,nginx部署转flv集成
海康rtsp拉流,rtmp推流,nginx部署转flv集成 项目实际使用并测试经正式使用无问题,有问题欢迎评论留言 核心后台java代码: try {// FFmpeg命令String command "ffmpeg -re -i my_video.mp4 -c copy -f flv rtmp://localho…...

【Python百宝箱】时序之美:Python 时间序列探秘与创新
时光漫游:Python 时间序列分析全指南 前言 在数字化时代,时间序列数据扮演着关键的角色,从金融到气象再到生产制造。本文将引导你穿越Python丰富的时间序列分析工具,探索从基础统计到机器学习和深度学习的各个层面。无论你是初学…...
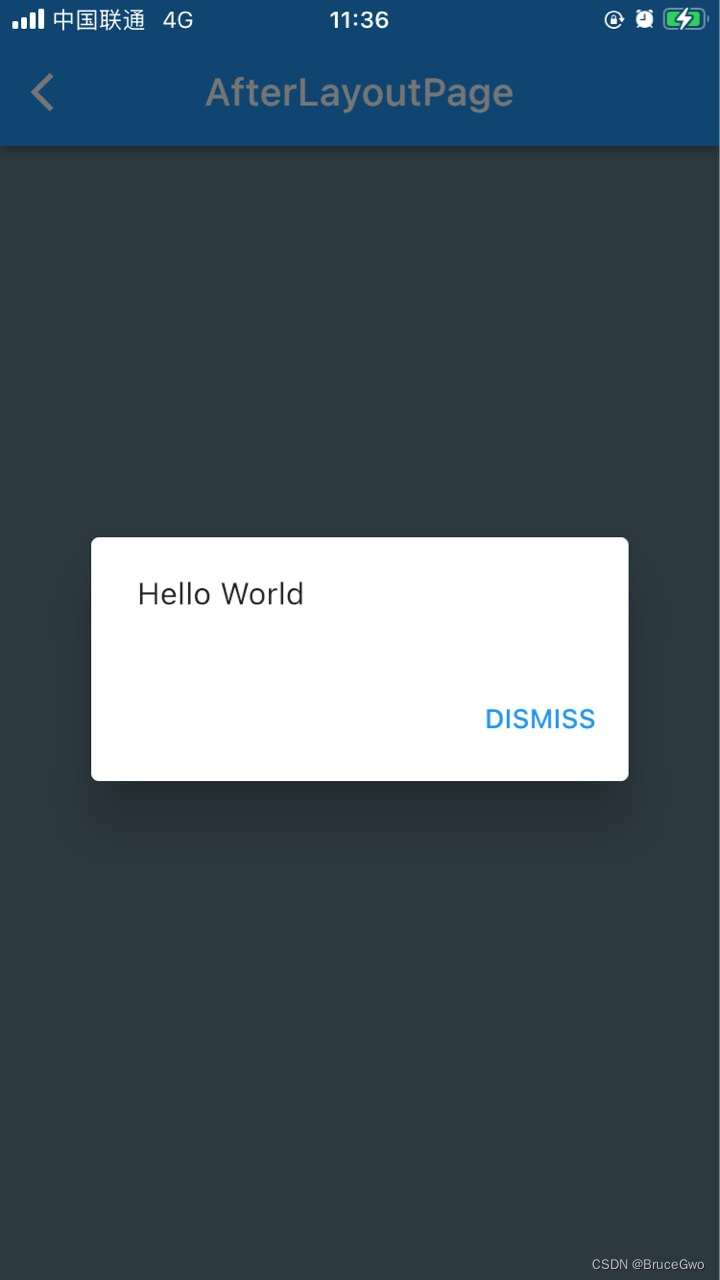
flutter开发实战-第一帧布局完成回调实现
flutter开发实战-第一帧布局完成回调实现 在开发中,我们有时候需要在第一帧布局完成后调用一些相关的方法。这里记录一下是实现过程。 Flutter中有多种不同的Binding,每种Binding都负责不同的功能。下面是Flutter中常见的Binding: 这里简单…...
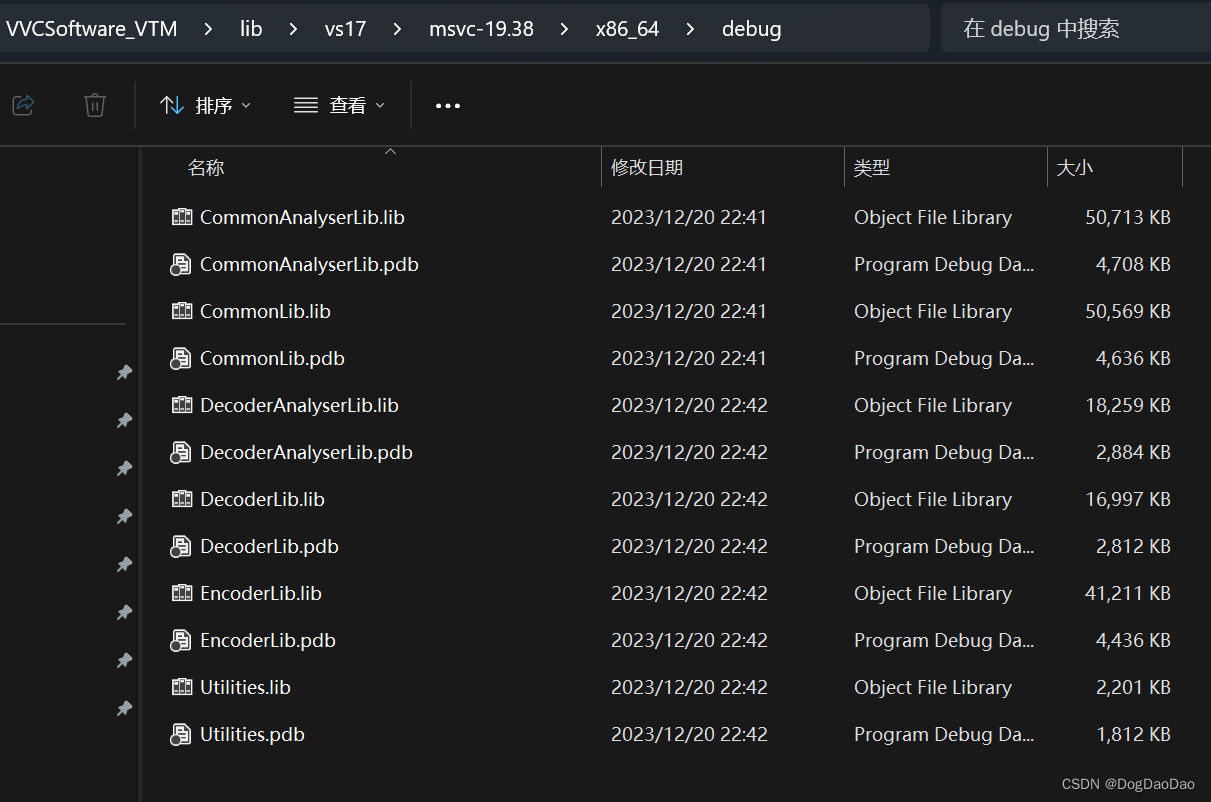
Windows11编译VTM源码生成Visual Studio 工程
VTM介绍 VTM作为H266/VVC标准的官方参考软件,一直用作H266/VVC标准的研究和迭代。关于H2666/VVC标准的介绍、代码、提案、文档等,可以参考H266/VVC编码标准介绍。 官方代码地址: https://vcgit.hhi.fraunhofer.de/jvet/VVCSoftware_VTM&…...
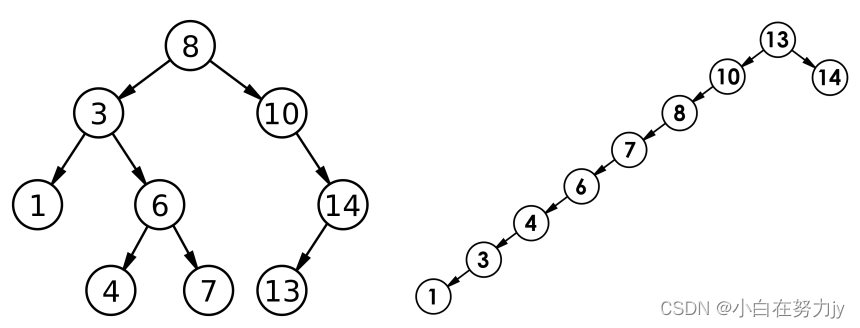
[数据结构进阶 C++] 二叉搜索树(BinarySearchTree)的模拟实现
文章目录 1、二叉搜索树1.1 二叉搜索数的概念1.2 二叉搜索树的操作1.2.1 二叉搜索树的查找1.2.2 二叉搜索树的插入1.2.3 二叉搜索树的删除 2、二叉搜索树的应用2.1 K模型2.2 KV模型 3、二叉搜索树的性能分析4、K模型与KV模型完整代码4.1 二叉搜索树的模拟实现(K模型…...
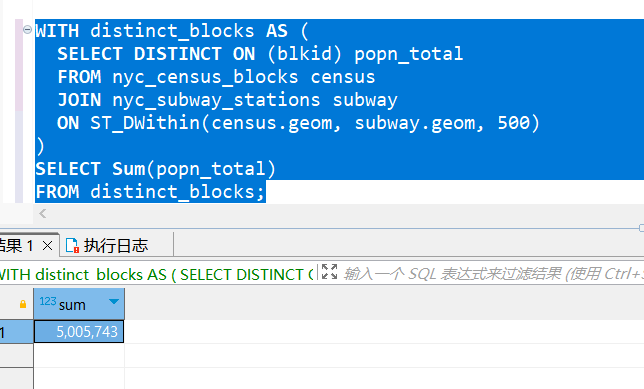
PostGIS学习教程十四:更多的空间连接
PostGIS学习教程十四:更多的空间连接 在上一节中,我们看到了ST_Centroid(geometry)和ST_Union([geometry])函数,以及一些简单的示例。在本节中,我们将用它们做一些更详细的事情。 提示:写完文章后,目录可以…...
【爬虫软件】孔夫子二手书采集
项目演示 孔网爬取图书信息 目录结构 [ |-- api-ms-win-core-synch-l1-2-0.dll, |-- api-ms-win-core-sysinfo-l1-1-0.dll, |-- api-ms-win-core-timezone-l1-1-0.dll, |-- api-ms-win-core-util-l1-1-0.dll, |-- api-ms-win-crt-conio-l1-1-0.dll, |-- api…...

P8736 [蓝桥杯 2020 国 B] 游园安排
题目描述 L \mathrm{L} L 星球游乐园非常有趣,吸引着各个星球的游客前来游玩。小蓝是 L \mathrm{L} L 星球 游乐园的管理员。 为了更好的管理游乐园,游乐园要求所有的游客提前预约,小蓝能看到系统上所有预约游客的名字。每个游客的名字由一…...
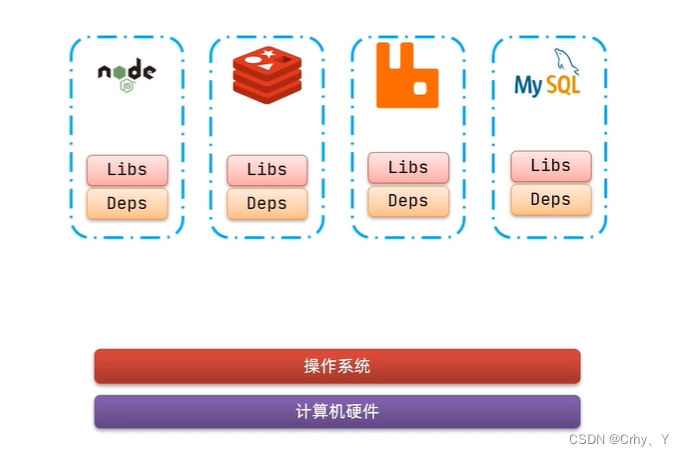
初识Docker-什么是docker
Docker是一个快速交付应用、运行应用的技术 目录 一、Docker 二、运用场景 一、什么是Docker?它的作用是什么? Docker如何解决大型项目依赖关系复杂,不同组件依赖的兼容性问题? Docker允许开发中将应用、依赖、函数库、配置一起打包&…...

maven的pom.xml设置本地仓库
配置 在Maven项目中,您可以在pom.xml文件中配置本地仓库的路径。在pom.xml文件中,您可以添加以下配置来指定本地仓库的路径: <project>...<repositories><repository><id>local-repo</id><url>file://…...

Qt获取屏幕DPI缩放比
获取屏幕缩放比 网上很多代码是用 logicalDotsPerInch 除以 96 来获取屏幕缩放比: // Windows 除以 96,macOS 除以 72 qreal factor window->screen()->logicalDotsPerInch() / 96.0; 当使能了缩放适配后,logicalDotsPerInch 值就不…...
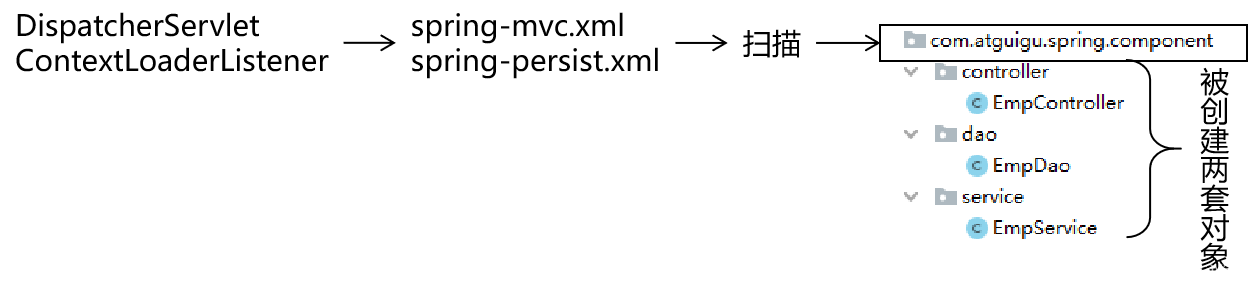
Spring MVC控制层框架
三、Spring MVC控制层框架 目录 一、SpringMVC简介和体验 1. 介绍2. 主要作用3. 核心组件和调用流程理解4. 快速体验 二、SpringMVC接收数据 1. 访问路径设置2. 接收参数(重点) 2.1 param 和 json参数比较2.2 param参数接收2.3 路径 参数接收2.4 json参…...
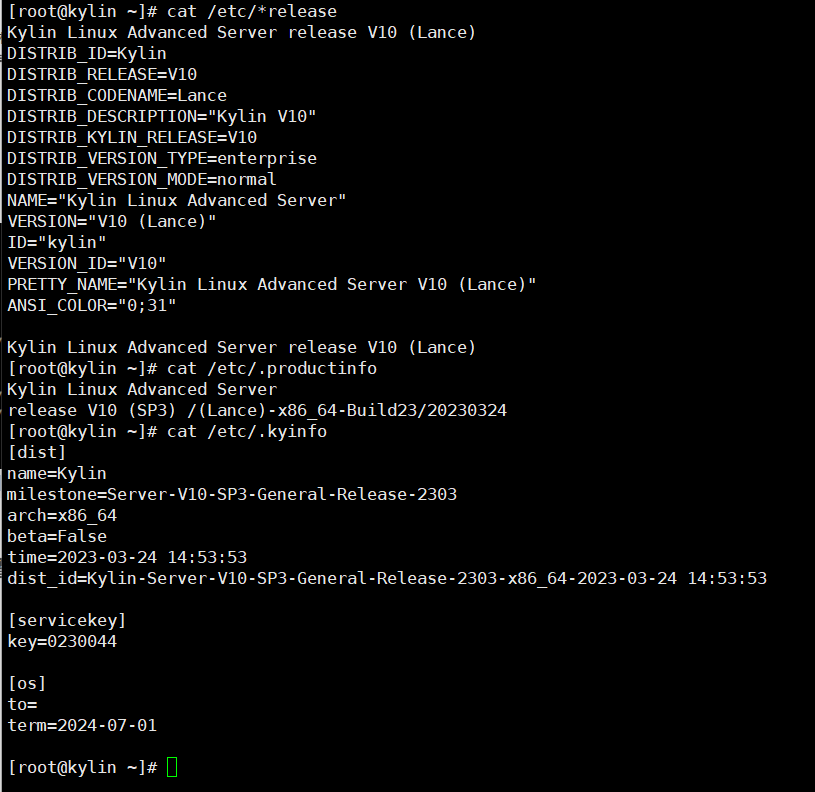
vmware安装银河麒麟V10高级服务器操作系统
vmware安装银河麒麟V10高级服务器操作系统 1、下载银河麒麟V10镜像2、VMware安装银河麒麟V10高级服务器操作系统2.1、新建虚拟机2.2、安装虚拟机 3、配置银河麒麟V10高级服务器操作系统3.1、安装vmware tools3.2、配置静态IP地址 和 dns3.3、查看磁盘分区3.4、查看系统版本 1、…...

掌握Jenknis基础概念
目录 任务(Jobs) 构建(Builds) 触发器(Triggers) 构建环境(Build Environment): 插件(Plugins): 参数化构建(Paramet…...
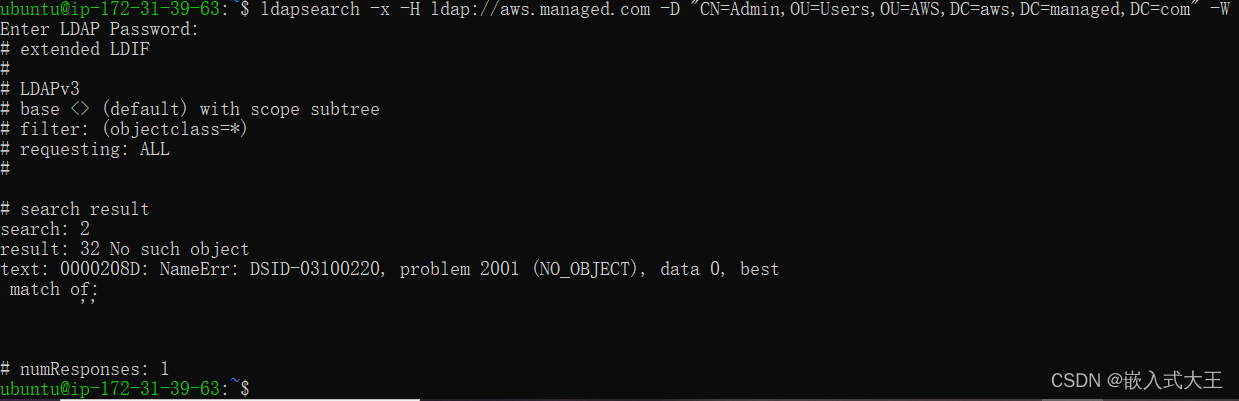
AWS 知识二:AWS同一个VPC下的ubuntu实例通过ldapsearch命令查询目录用户信息
前言: 前提:需要完成我的AWS 知识一创建一个成功运行的目录。 主要两个重要:1.本地windows如何通过SSH的方式连接到Ubuntu实例 2.ldapsearch命令的构成 一 ,启动一个新的Ubuntu实例 1.创建一个ubuntu实例 具体创建实例步骤我就不…...
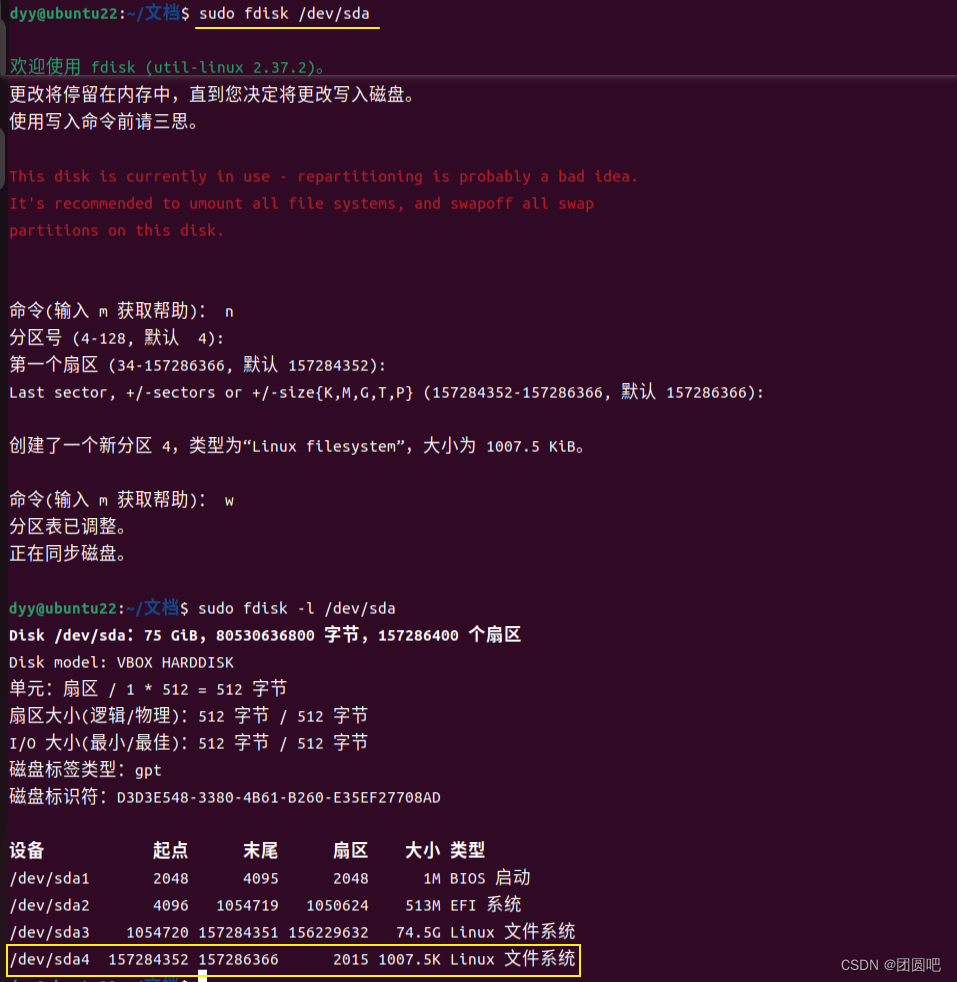
Ubuntu 常用命令之 fdisk 命令用法介绍
📑Linux/Ubuntu 常用命令归类整理 fdisk 是一个用于处理磁盘分区的命令行工具,它在 Linux 系统中广泛使用。fdisk 命令可以创建、删除、更改、复制和显示硬盘分区,以及更改硬盘的分区 ID。 fdisk 命令的常用参数如下 -l:列出所…...

GPT宏系统开发指南:从提示词模板到RAG知识库的自动化实践
1. 项目概述:一个让GPT“记住”并“执行”的自动化利器如果你经常和GPT打交道,无论是ChatGPT的Web界面,还是通过API调用,肯定都遇到过这样的烦恼:每次对话,你都得把那些重复的、固定的指令或背景信息再敲一…...

如何在matlab中调用taotoken聚合大模型api的详细教程
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 如何在 MATLAB 中调用 Taotoken 聚合大模型 API 的详细教程 对于使用 MATLAB 进行科学计算、数据分析或工程开发的用户而言&#x…...

通用型数据采集系统选型指南:从原理到实战的七维评估
1. 数据采集系统:从物理世界到数字世界的桥梁在航空航天、汽车、工业自动化乃至国防军工这些领域里,我们工程师每天打交道最多的,可能就是那些看不见摸不着的物理量:发动机涡轮叶片的温度、飞机机翼的应变、汽车悬架的动态压力、或…...

如何快速解密RPG Maker加密文件:新手必看的完整解密指南
如何快速解密RPG Maker加密文件:新手必看的完整解密指南 【免费下载链接】RPGMakerDecrypter Tool for decrypting and extracting RPG Maker XP, VX and VX Ace encrypted archives and MV and MZ encrypted files. 项目地址: https://gitcode.com/gh_mirrors/rp…...

Python一键打包exe
链接:https://pan.quark.cn/s/a5759c489d72...
)
别再死记硬背公式了!用‘井字棋’和‘抢30’游戏带你直观理解巴什博弈(Bash Game)
用童年游戏破解数学奥秘:从"抢30"到巴什博弈的思维跃迁 记得小时候和伙伴们玩"抢30"游戏吗?两人轮流报数,每次可以说1到3个连续数字,谁先喊出"30"谁就获胜。这个看似简单的游戏背后,隐藏…...

dotfiles工程化:用Git与符号链接打造可移植的开发环境
1. 项目概述:dotfiles 是什么,以及为什么你需要它如果你在终端里敲命令的时间超过了你用鼠标点来点去的时间,那你大概率已经听说过dotfiles了。简单来说,dotfiles就是你系统里那些以点(.)开头的配置文件&am…...

构建数据科学AI代理规则库:从自动化到智能化的关键路径
1. 项目概述:一个为数据科学工作流定制的智能代理规则库最近在GitHub上看到一个挺有意思的项目,叫ds-agent-rules。光看名字,你可能觉得这又是一个平平无奇的规则文件集合。但作为一个在数据科学和自动化领域摸爬滚打多年的从业者,…...
)
别再手动画图了!用Python ASE + Matplotlib一键生成高质量材料结构图(附完整代码)
科研绘图革命:用Python ASEMatplotlib实现材料结构可视化自动化 深夜的实验室里,屏幕荧光映照着一张疲惫的脸——这可能是许多材料科学研究者共同的记忆。当你在论文截稿日前夕,还在反复调整VESTA中的原子位置、尝试各种角度截图时࿰…...

【Twitter算法适配型Prompt库】:2024Q2官方推荐权重结构解析+ChatGPT生成内容通过率提升67%的12个黄金句式
更多请点击: https://intelliparadigm.com 第一章:Twitter算法适配型Prompt库的演进逻辑与2024Q2权重变革本质 算法信号层重构驱动Prompt范式迁移 2024年第二季度,X(原Twitter)平台正式将Engagement Velocity Ratio&…...