Docker 编译OpenHarmony 4.0 release
一、背景介绍
1.1、环境配置
- 编译环境:Ubuntu 20.04
- OpenHarmony版本:4.0 release
- 平台设备:RK3568
OpenHarmony 3.2更新至OpenHarmony 4.0后,公司服务器无法编译通过,总是在最后几十个文件时报错,错误码4000:
[OHOS ERROR] ld.lld: error: undefined symbol: __aarch64_cas4_acq_rel
[OHOS ERROR] >>> referenced by hdf_vnode_adapter.c:294 (/home/xxx/OHOS/OpenHarmony_master/out/kernel/OBJ/linux-5.10/../../../../drivers/hdf_core/framework/core/adapter/vnode/src/hdf_vnode_adapter.c:294)
[OHOS ERROR] >>> vmlinux.o:(HdfVNodeAdapterIoctl)
[OHOS ERROR] >>> referenced by hdf_vnode_adapter.c:303 (/home/xxx/OHOS/OpenHarmony_master/out/kernel/OBJ/linux-5.10/../../../../drivers/hdf_core/framework/core/adapter/vnode/src/hdf_vnode_adapter.c:303)
[OHOS ERROR] >>> vmlinux.o:(HdfVNodeAdapterIoctl)
[OHOS ERROR] >>> referenced by hdf_vnode_adapter.c:428 (/home/xxx/OHOS/OpenHarmony_master/out/kernel/OBJ/linux-5.10/../../../../drivers/hdf_core/framework/core/adapter/vnode/src/hdf_vnode_adapter.c:428)
[OHOS ERROR] >>> vmlinux.o:(HdfDeviceSendEventToClient)
[OHOS ERROR] >>> referenced 1 more times
[OHOS ERROR] BTF .btf.vmlinux.bin.o
[OHOS ERROR] pahole: .tmp_vmlinux.btf: No such file or directory
[OHOS ERROR] LD .tmp_vmlinux.kallsyms1
[OHOS ERROR] ld.lld: error: .btf.vmlinux.bin.o: unknown file type
[OHOS ERROR] make[2]: *** [/home/xxx/OHOS/OpenHarmony_master/out/kernel/src_tmp/linux-5.10/Makefile:1236: vmlinux] Error 1
[OHOS ERROR] make[1]: *** [arch/arm64/Makefile:208: rk3568-toybrick-x0-linux.img] Error 2
[OHOS ERROR] make[1]: Leaving directory '/home/xxx/OHOS/OpenHarmony_master/out/kernel/OBJ/linux-5.10'
[OHOS ERROR] make: *** [Makefile:192: __sub-make] Error 2
[OHOS ERROR] Traceback (most recent call last):
...
[OHOS ERROR] raise OHOSException('ninja phase failed', '4000')
[OHOS ERROR] exceptions.ohos_exception.OHOSException: ninja phase failed
[OHOS ERROR]
[OHOS ERROR] Code: 4000
[OHOS ERROR]
[OHOS ERROR] Reason: ninja phase failed
[OHOS ERROR]
[OHOS ERROR] Solution: Please check the compile log at out/{compiling product}/build.log, If you could analyze build logs.
[OHOS ERROR] Or you can try the following steps to solve this problem:
[OHOS ERROR] 1. cd to OHOS root path
[OHOS ERROR] 2. run 'hb clean --all' or 'rm -rf out build/resources/args/.json'.
[OHOS ERROR] 3. repo sync
[OHOS ERROR] 4. repo forall -c 'git lfs pull'
[OHOS ERROR] 5. bash build/prebuilts_download.sh
[OHOS ERROR] 6. rebuild your product or component
[OHOS ERROR] 7. check if any environment variables required by the building process are not set in build/compile_env_allowlist.json
[OHOS ERROR]
[OHOS ERROR] If you still cannot solve this problem, you could post this problem on:
[OHOS ERROR] https://gitee.com/openharmony/build/issues
[OHOS ERROR]
=====build error=====
经分析尝试:
1、相同的步骤和命令,wsl2 编译OpenHarmony 4.0 r正常。
2、服务器使用sudo编译正常,但由于sudo使用root权限,会影响项目编译链等配置,故不能作为解决方案。
于是尝试在服务器中使用docker,通过隔离环境编译OpenHarmony 4.0。
二、docker安装与配置

在Ubuntu服务器中安装和配置docker
2.1、docker安装
$ sudo apt-get update
$ sudo apt-get upgrade$ sudo apt install docker.io
#安装后通过查看docker版本验证是否安装成功
$ docker --version 或 docker -v
Docker version 24.0.5, build 24.0.5-0ubuntu1~20.04.1
2.2、获取docker 镜像
获取docker镜像,以ubuntu:20.04为例
注意:此过程较漫长,请耐心等待~
$ docker pull ubuntu:20.04#创建好后可通过image命令查看
$ docker images 或docker image ls
REPOSITORY TAG IMAGE ID CREATED SIZE
ubuntu 20.04 f78909c2b360 8 days ago 72.8MB
swr.cn-south-1.myhuaweicloud.com/openharmony-docker/docker_oh_standard 3.2 ae33c06f45c5 6 months ago 5.3GB
2.3、创建docker容器
#进入需要与docker映射的目录,后续基于此目录的修改,容器和服务会同步。
$ cd ~/docker/
$ docker run -it -v $(pwd):/home/zhangsan --name ohos ubuntu:20.04
说明:命令表示创建一个名为ohos,系统镜像为ubuntu 20.04的容器;这个容器运行在交互模式下,并且将当前目录映射到容器的/home/zhangsan目录。
注意:zhangsan需与后续要在ohos创建的非root用户名保持一致,否则后续下拉和编译代码会出现权限问题。
创建好ohos容器,默认以root用户进入。
#退出root用户
$ exit
# 启动ohos容器
$ docker container start ohos
#查看docker容器
$ docker container ls
CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMES
ab7d67807966 ubuntu:20.04 "/bin/bash" 29 hours ago Up 29 hours ohos
2.4、ohos容器中创建非root用户
由于docker 容易与宿主系统共享一个内核,容器中的用户ID和组ID是映射到宿主系统的;默认情况下,容器内的所有进程都以root用户身份运行。这意味着容器内的进程具有与宿主系统中的root用户相同的权限。为了提高安全性,建议在容器中使用非root用户运行进程。
#运行ohos容器(默认root用户)
$ docker exec -it ohos bash
$ apt-get update
$ apt-get upgrade
$ apt install -y sudo
$ apt install -y vim#添加非root用户zhangsan
$ useradd -m zhangsan
#设置用户密码,123456
$ passwd zhangsan
#设置zhangsan用户组
$ usermod -aG zhangsan zhangsan#sudoers添加zhangsan
$ vim /etc/sudoers #文末添加一行zhangsan ALL=(ALL) ALL
#设置/home/zhangsan目录用户和组,需与用户名保持一致
$ chown -R zhangsan:zhangsan /home/zhangsan
$ exit
注意:zhangsan的uid和gid需与宿主系统自己的uid和gid保持一致,否则后续下载源码后,在宿主系统中自己无权限修改。
如下zhangsan 与wangwu的id匹配一致,为1003
#ohos容器zhangsan 用户名,uid,gid和组信息
$ whoami && id
uid=1003(zhangsan) gid=1003(zhangsan) groups=1003(zhangsan)#宿主系统自己账户(wangwu)用户名,uid,gid和组信息
$ whoami && id
wangwu
uid=1003(wangwu) gid=1003(wangwu) groups=1003(wangwu)
若ohos容器中zhangsan的uid与wangwu的不一致(通常zhangsan.uid < wangwu.uid),可在容器中添加任意用户,uid号以1000开始累加,最终使得zhangsan.uid = wangwu.uid即可
#由于uid不匹配,先删除zhangsan用户
userdel zhangsan# 添加随意用户 tom,jerry
$ useradd -M tom
$ useradd -M jerry#查看所有用户
cat /etc/passwd
...
tom:x:1001:1001::/home/tom:/bin/sh
jerry:x:1002:1002::/home/jerry:/bin/sh#此时再次添加zhangsan用户,其uid则为1003
三、OpenHarmony 4.0 源码下载及编译
3.1、配置ohos容器编译环境
#以zhangsan用户运行ohos容器
$ docker exec --user zhangsan -it ohos bash#替换软件源
$ sudo mv /etc/apt/sources.list /etc/apt/sources.list.bak
$ sudo vim /etc/apt/sources.list #sources.list替换以下内容
deb http://mirrors.ustc.edu.cn/ubuntu/ focal main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ focal main restricted universe multiversedeb http://mirrors.ustc.edu.cn/ubuntu/ focal-security main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ focal-security main restricted universe multiversedeb http://mirrors.ustc.edu.cn/ubuntu/ focal-updates main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ focal-updates main restricted universe multiversedeb http://mirrors.ustc.edu.cn/ubuntu/ focal-backports main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ focal-backports main restricted universe multiverse## Not recommended
# deb http://mirrors.ustc.edu.cn/ubuntu/ focal-proposed main restricted universe multiverse
# deb-src http://mirrors.ustc.edu.cn/ubuntu/ focal-proposed main restricted universe multiverse
更新
$ sudo apt-get update
$ sudo apt-get upgrade#将Shell环境修改为bash
$ sudo dpkg-reconfigure dash #select no#部署编译环境,安装工具包
$ sudo apt-get install -y gcc-arm-linux-gnueabi gcc-9-arm-linux-gnueabi
$ sudo apt-get install -y python python3 python3-pip binutils binutils-dev git git-lfs gnupg flex bison gperf build-essential zip curl zlib1g-dev libc6-dev-i386 lib32ncurses5-dev x11proto-core-dev libx11-dev lib32z1-dev ccache libgl1-mesa-dev libxml2-utils xsltproc unzip m4 bc gnutls-bin python3.8 python3-pip ruby genext2fs device-tree-compiler make libffi-dev e2fsprogs pkg-config perl openssl libssl-dev libelf-dev libdwarf-dev u-boot-tools mtd-utils cpio doxygen liblz4-tool openjdk-8-jre gcc g++ texinfo dosfstools mtools default-jre default-jdk libncurses5 apt-utils wget scons python3.8-distutils tar rsync git-core libxml2-dev lib32z-dev grsync xxd libglib2.0-dev libpixman-1-dev kmod jfsutils reiserfsprogs xfsprogs squashfs-tools pcmciautils quota ppp libtinfo-dev libtinfo5 libncurses5-dev libncursesw5 libstdc++6 gcc-arm-none-eabi vim ssh locales libxinerama-dev libxcursor-dev libxrandr-dev libxi-dev
#上一步命令执行过程需手动选择时区配置:6.Asia/70.Shanghai#配置pip软件包更新源
$ mkdir ~/.pip
$ pip3 config set global.index-url https://mirrors.huaweicloud.com/repository/pypi/simple
$ pip3 config set global.trusted-host mirrors.huaweicloud.com
$ pip3 config set global.timeout 120#配置git
git config --global user.email "jerry@163.com"
git config --global user.name "jerry"
git config --global credential.helper store
git config --global --add safe.directory "*"#安装repo
wget https://gitee.com/oschina/repo/raw/fork_flow/repo-py3
sudo mv repo-py3 /usr/local/bin/repo
sudo chmod a+x /usr/local/bin/repo
pip3 install -i https://repo.huaweicloud.com/repository/pypi/simple requests
3.2、下拉OpenHarmony 4.0r源码及编译
$ mkdir OpenHarmony_4.0r && cd OpenHarmony_4.0r
$ repo init -u https://gitee.com/openharmony/manifest -b OpenHarmony-4.0-Release --no-repo-verify
$ repo sync -c && repo forall -c 'git lfs pull'
$ bash build/prebuilts_download.sh
$ ./build.sh -p rk3568 #编译成功,结果如下
...
Please modify according to README.md
[OHOS INFO] rk3568 build success
[OHOS INFO] Cost time: 0:14:17
=====build successful=====
2023-12-21 21:29:18
++++++++++++++++++++++++++++++++++++++++
宿主系统可见openharmony 4.0r代码已拉下,并有权限修改
$ tree -L 2 ~/docker/
docker/
├── OpenHarmony_4.0r
│ ├── applications
│ ├── arkcompiler
│ ├── base
│ ├── build
│ ├── build.py -> build/build_scripts/build.py
│ ├── build.sh -> build/build_scripts/build.sh
│ ├── commonlibrary
│ ├── developtools
│ ├── device
│ ├── docs
│ ├── domains
│ ├── drivers
│ ├── foundation
...#创建文件正常
$ touch ~/docker/OpenHarmony_4.0r/test
后续
当然,ohos环境可以自己打包成镜像推至自己的仓库,上述繁琐的过程可以在Dockerfile中进行配置,仅通过docker build 命令完成全部操作,刚接触docker,待后续优化完善~
相关文章:
Docker 编译OpenHarmony 4.0 release
一、背景介绍 1.1、环境配置 编译环境:Ubuntu 20.04OpenHarmony版本:4.0 release平台设备:RK3568 OpenHarmony 3.2更新至OpenHarmony 4.0后,公司服务器无法编译通过,总是在最后几十个文件时报错,错误码4000…...

Vue 3 表单处理精讲:打造响应式注册表单的艺术
🧙♂️ 诸位好,吾乃诸葛妙计,编程界之翘楚,代码之大师。算法如流水,逻辑如棋局。 📜 吾之笔记,内含诸般技术之秘诀。吾欲以此笔记,传授编程之道,助汝解技术难题。 &…...
浅谈Guava Cache的参数使用
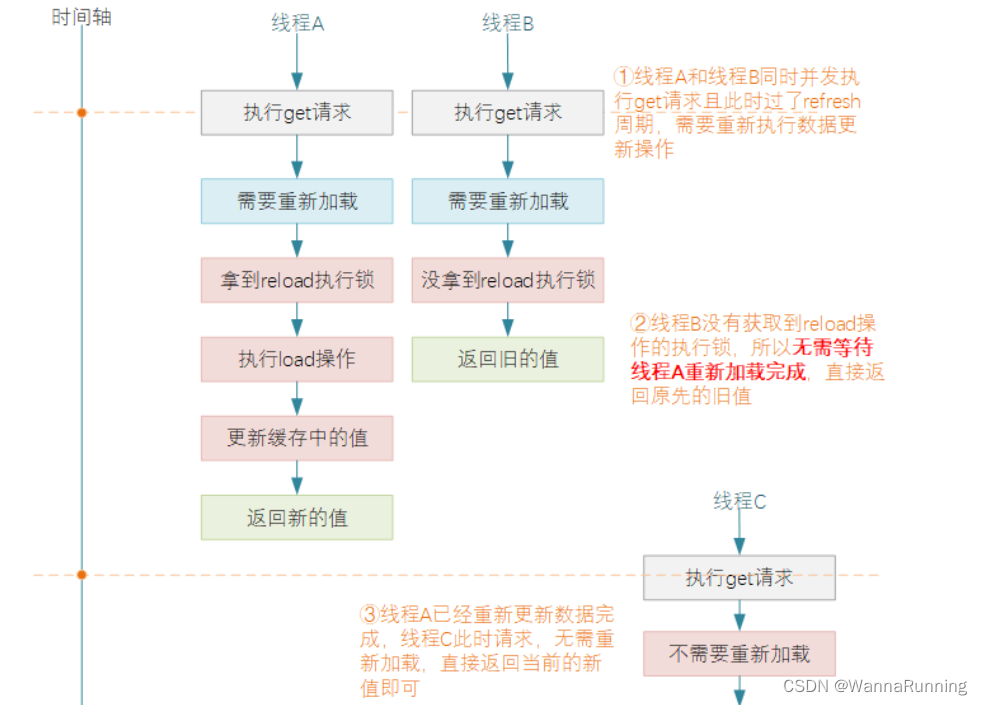
CacheLoader 用于数据加载方式比较固定且统一的场景,在缓存容器创建的时候就需要指定此具体的加载逻辑。通常开发中使用时我们需要继承CacheLoader类或写一个匿名实现类实现其load方法和reload方法 load方法 当执行get操作没有命中缓存或者判断缓存已经超出expir…...
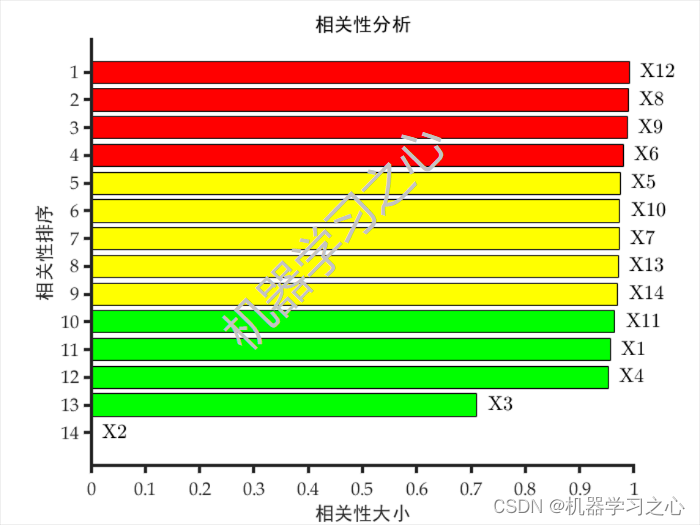
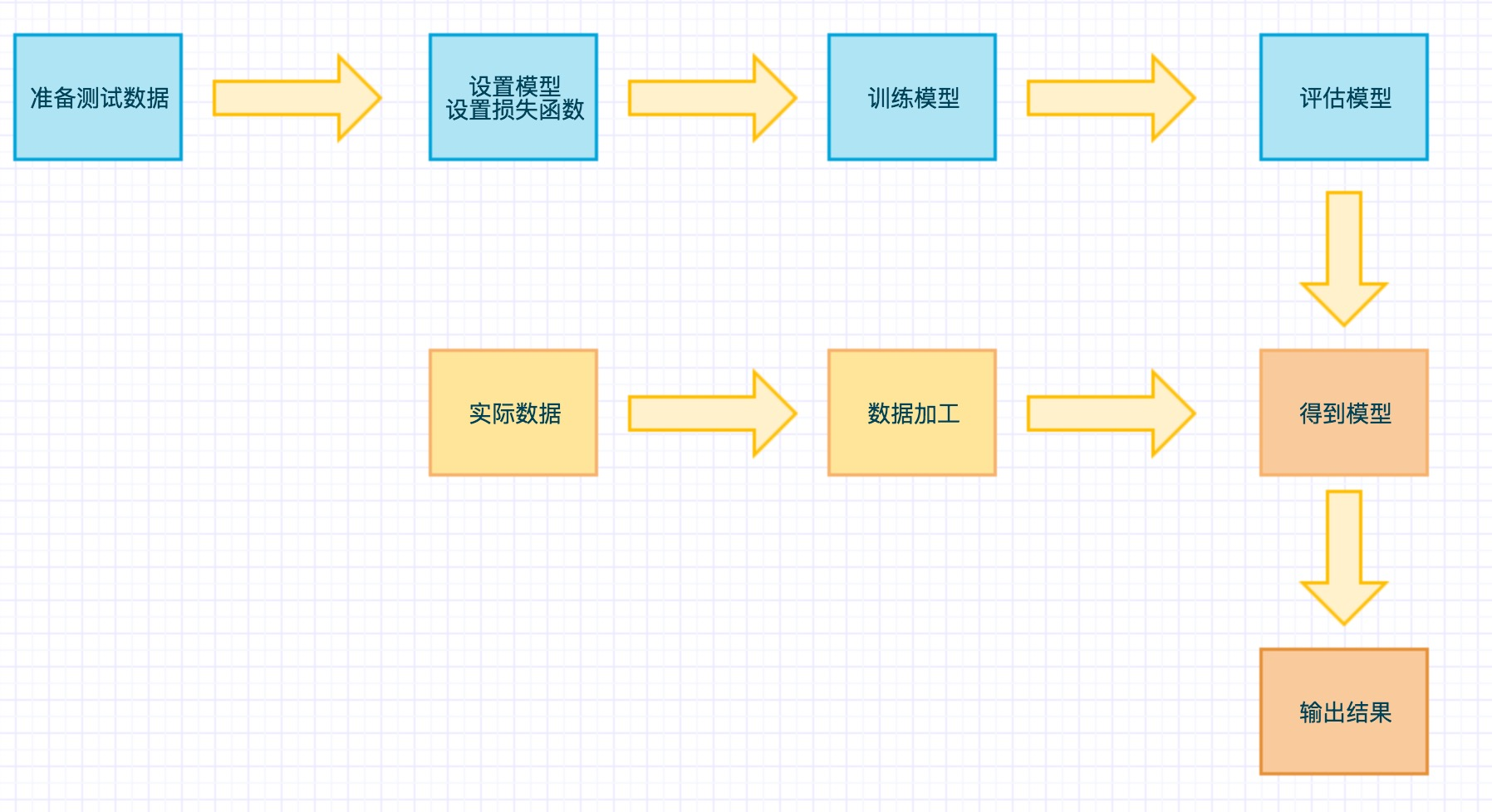
交通流预测 | Matlab基于KNN-BiLSTM的交通流预测(对比SVR、LSTM、GRU、KNN-LSTM)
目录 预测效果基本介绍程序设计参考资料 预测效果 基本介绍 交通流预测 | Matlab基于KNN-BiLSTM的交通流预测(对比SVR、LSTM、GRU、KNN-LSTM) 程序设计 完整程序和数据获取方式:私信博主回复Matlab基于KNN-BiLSTM的交通流预测(对…...
)
云卷云舒:面向业务的智能运维(上)
1、BAIOPS-业务智能运维 智能运维(AIOps-Algorithmic IT Operations基于算法的IT运维)是人工智能技术在IT运维领域的运用,引用Gartner 的报告的一段话“到2020年,将近50%的企业将会在他们的业务和IT运维方面采用AIOps,…...

centos 7.4 docker
centos 7.4 docker 1.查看系统版本 cat /etc/redhat-release CentOS Linux release 7.4.1708 (Core)哈1 cat /etc/redhat-release CentOS Linux release 7.9.2009 (Core) 哈1-02 cat /etc/redhat-release CentOS Linux release 7.6.1810 (Core) 哈1-22 cat /etc/redhat…...
零基础学人工智能:TensorFlow 入门例子
识别手写图片 因为这个例子是 TensorFlow 官方的例子,不会说的太详细,会加入了一点个人的理解,因为TensorFlow提供了各种工具和库,帮助开发人员构建和训练基于神经网络的模型。TensorFlow 中最重要的概念是张量(Tenso…...

go从0到1项目实战体系二一:gin框架安装
(1). 设置公用的代理服务地址: 如果设置了全局可忽略. $ export GOPROXYhttps://goproxy.io // linux > go env可以查看 $ export GOPROXYhttps://goproxy.cn // linux国内镜像 $ set GOPROXYhttps://goproxy.io // windows(2). 创建以下目录: 请忘记GOPATH目录…...

运用JavaSE知识实现图书管理系统
目录 一.Main函数二.用户类三.普通用户类四.管理员类五.图书类六.书架类七.操作类1.操作接口2.增加操作3.删除操作4.查找操作5.展示操作6.借阅操作7.归还操作8.退出系统 总结 这篇图书管理系统是对JavaSE知识总结复习的一个小作业,检测自己对知识的掌握程度。 一.Ma…...

微信小程序生成一个天气查询的小程序
微信小程序生成一个天气查询的小程序 基本的页面结构和逻辑 页面结构:包括一个输入框和一个查询按钮。 页面逻辑:在用户输入城市名称后,点击查询按钮,跳转到天气详情页面,并将城市名称作为参数传递。 主要代码 index…...

Seata源码——TCC模式解析02
初始化 在SpringBoot启动的时候通过自动注入机制将GlobalTransactionScanner注入进ioc而GlobalTransactionScanner继承AbstractAutoProxyCreatorAbstract 在postProcessAfterInitialization阶段由子类创建代理TccActionInterceptor GlobalTransactionScanner protected Obje…...

缓存-Redis
Springboot使用Redis 引入pom依赖: <dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-data-redis</artifactId> </dependency>在application.yml、application-dev.yml中配置Redis的访…...
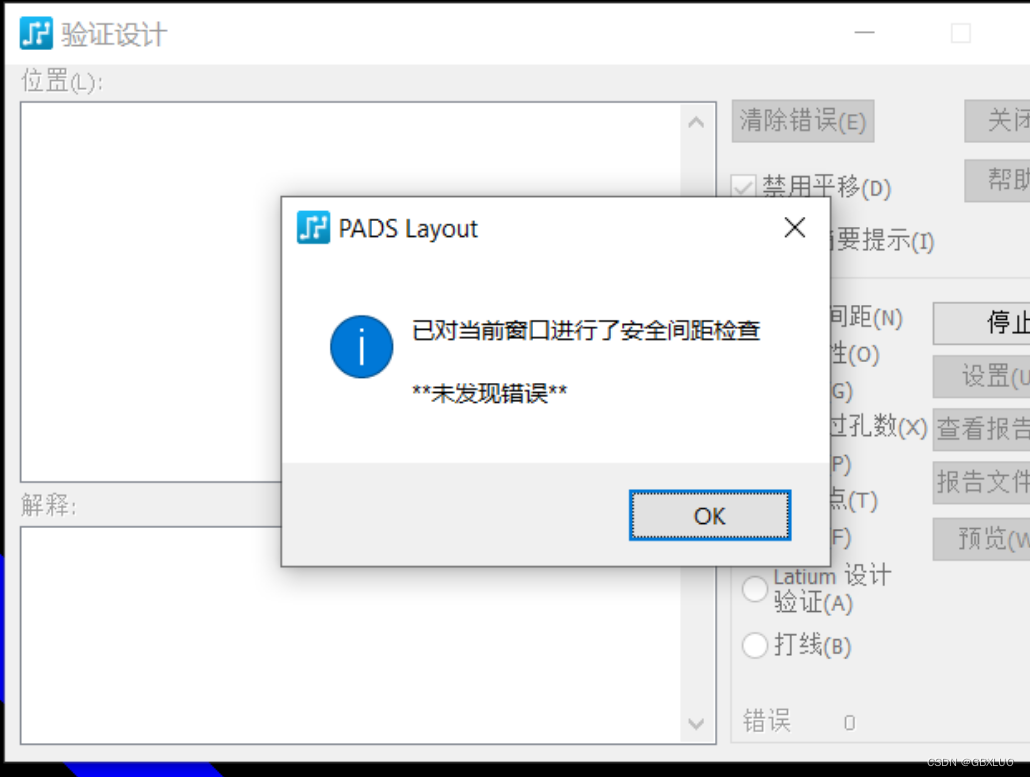
PADS Layout安全间距检查报错
问题: 在Pads Layout完成layout后,进行工具-验证设计安全间距检查时,差分对BAK_FIXCLK_100M_P / BAK_FIXCLK_100M_N的安全间距检查报错,最小为3.94mil,但是应该大于等于5mil;如下两张图: 检查&…...
 ----- ebpf前世今生)
ebpf基础篇(二) ----- ebpf前世今生
bpf 要追述ebpf的历史,就不得不提bpf. bpf(Berkeley Packet Filter)从早(1992年)诞生于类Unix系统中,用于数据包分析. 它提供了数据链路层的接口,可以在数据链路层发送和接收数据.如果网卡支持混杂模式,所有的数据包都可以被接收,即使这些数据包的目的地址是其它主机. BPF最为…...

我的一天:追求专业成长与生活平衡
早晨的序幕:奋斗的开始 今天的一天始于清晨的6点47分。实现了昨天的早睡早起的蜕变计划。洗漱完成之后,7点17分出门,7点33分我抵达公司,为新的一天做好准备。7点52分,我开始我的学习之旅。正如我所体会的,“…...
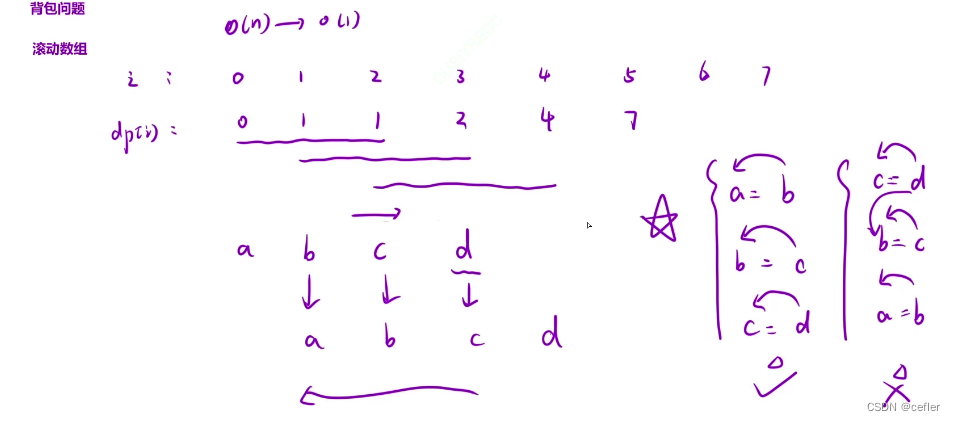
【动态规划】斐波那契数列模型
欢迎来到Cefler的博客😁 🕌博客主页:那个传说中的man的主页 🏠个人专栏:题目解析 🌎推荐文章:题目大解析(3) 前言 算法原理 1.状态表示 是什么?dp表(一维数组…...

机器人运动学分析与动力学分析主要作用
机器人运动学分析和动力学分析是两个重要的概念,它们在研究和设计工业机器人时起着关键作用。 1. 机器人运动学分析: 机器人运动学是研究机器人运动的科学,它涉及机器人的位置、速度、加速度和轨迹等方面。机器人运动学分析主要包括正解和逆…...

【Java 基础】33 JDBC
文章目录 1. 数据库连接1)加载驱动2)建立连接 2. 常见操作1)创建表2)插入数据3)查询数据4)使用 PreparedStatement5)事务管理 3. 注意事项总结 Java Database Connectivity(JDBC&…...
Unity中Shader缩放矩阵
文章目录 前言一、直接相乘缩放1、在属性面板定义一个四维变量,用xyz分别控制在xyz轴上的缩放2、在常量缓存区申明该变量3、在顶点着色器对其进行相乘,来缩放变换4、我们来看看效果 二、使用矩阵乘法代替直接相乘缩放的原理1、我们按如下格式得到缩放矩阵…...
Nessus详细安装-windows (保姆级教程)
Nessus描述 Nessus 是一款广泛使用的网络漏洞扫描工具。它由 Tenable Network Security 公司开发,旨在帮助组织评估其计算机系统和网络的安全性。 Nessus 可以执行自动化的漏洞扫描,通过扫描目标系统、识别和评估可能存在的安全漏洞和弱点。它可以检测…...

Android Recovery 模式工作原理与定制实战
Recovery 是 Android 的"救命系统",负责 OTA 升级、恢复出厂、用户数据加密管理。本文剖析 Recovery 的架构、启动流程、与主系统的通信机制,并演示如何修改并构建一个自定义 Recovery。一、Recovery 到底是什么? 很多人以为 Recovery 是 Android 系统的一个"模…...

【仅限首批内测用户验证】:Midjourney v8“隐性美学协议”曝光——92%设计师尚未察觉的4类负向提示陷阱
更多请点击: https://intelliparadigm.com 第一章:Midjourney v8“隐性美学协议”的本质解构 Midjourney v8 并未公开发布传统意义上的“美学参数文档”,其核心创新在于将图像生成的审美判断内化为一套不可见但可触发的上下文响应机制——即…...

对比直接购买与使用Taotoken Token Plan套餐的成本控制体验
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比直接购买与使用Taotoken Token Plan套餐的成本控制体验 1. 引言:个人开发者的成本困惑 作为个人开发者࿰…...
)
数据库——(DB、DBMS、SQL)
数据库——(DB、DBMS、SQL) 前言数据库是存放数据的仓库。它的存储空间很大,可以存放百万条、千万条、上亿条数据。但是数据库并不是随意地将数据进行存放,是有一定的规则的,否则查询的效率会很低。当今世界是一个充满…...

XHS-Downloader:一款完全免费的小红书内容采集神器
XHS-Downloader:一款完全免费的小红书内容采集神器 【免费下载链接】XHS-Downloader 小红书(XiaoHongShu、RedNote)链接提取/作品采集工具:提取账号发布、收藏、点赞、专辑作品链接;提取搜索结果作品、用户链接&#x…...

中小团队在ubuntu服务器利用taotoken管理多项目api密钥与用量
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 中小团队在 Ubuntu 服务器利用 Taotoken 管理多项目 API 密钥与用量 在 Ubuntu 服务器上运行多个 AI 实验项目是许多中小型技术团队…...

从数据云到ArcGIS:一站式掌握DEM影像的获取、拼接与裁剪实战
1. DEM影像基础与数据源选择 数字高程模型(DEM)是地理信息系统中描述地表形态的基础数据,广泛应用于地形分析、水文模拟、工程建设等领域。对于刚接触GIS的朋友来说,最常见的困惑就是:从哪里获取DEM数据?不…...

CircuitPython嵌入式开发:从代码编辑、串口调试到库管理的完整工作流
1. 从零开始:CircuitPython的嵌入式开发哲学如果你和我一样,是从Arduino或者传统的C语言嵌入式开发转过来的,第一次接触CircuitPython的感觉,大概就像从手动挡汽车换到了电动车。那种“拧钥匙、挂挡、踩离合”的繁琐步骤ÿ…...

打磨与展望:RAG 的进阶技巧与避坑指南
走过了从加载文档到完整问答链的全程,恭喜你——你已经亲手建造出了一台可以和自己文档“对话”的 RAG 引擎。但任何一个上过生产环境的开发者都知道:原型和产品之间,往往隔着一条名为“细节”的护城河。 用户开始提各种刁钻问题,…...

Python量化交易框架解析:从数据到实盘的完整实现
1. 项目概述与核心价值最近在GitHub上看到一个挺有意思的项目,叫“ZJHuang915/PythonQuantTrading”。光看名字,很多朋友可能就明白了,这是一个用Python做量化交易的代码仓库。我花了点时间把整个项目翻了一遍,发现它不是一个简单…...