[机器人-2]:开源MIT Min cheetah机械狗设计(二):机械结构设计
目录
1、四肢朝向的选择
2、电机布局形式的选择
3、电机的选型及测试(非常重要)
4、结构优化
5、尺寸效应
6、其他
1、四肢朝向的选择
机械狗的结构设计,第一个摆在我们面前的就说四肢的朝向问题,如下图,我们是选择猎豹的向前弯曲,还是角马的向后弯曲呢?其实为了方便爬楼梯选择了向后弯曲,也即角马的骨骼形式。

不同动物的骨骼形式
2、电机布局形式的选择
一般我们在设计四肢运动的时候,最先想到的就是在各个关节上直接加一个电机,如下图的左边所示,两个关节处各加装一个电机,但是,这样当小腿在摆动的时候,惯性会非常大,可以想象如果在你的膝盖住绑一个沙袋,在行走时就会非常的费劲,非常消耗能量,因此我们自然而然会想到将膝盖处的电机移动到上端,通过一个同步带和膝盖相连,如右图所示。

左图:电机安装在关节处,右图:电机集中安装在髋关节
除此之外还要考虑一个问题,如果机械狗摔倒后还要能够翻身起来,我们自然而然会想到再增加一个自由度,也即还要增加一个倾斜电机,原因如下面视频所示:

00:22
3、电机的选型及测试(非常重要)
一个机械狗动力强不强劲,电机起到至关重要的作用,机械狗的电机比较特殊,类似于公版电机T-Motor U8的型号,这款电机是广泛应用于四旋翼的,需要很高的能量密度(不然就无法完成后空翻这样的经典动作),因此机械狗的动力选择的是无人机的无刷电机+行星齿轮组的形式,每个执行器都由一个定制的高耦合到单级6:1的行星齿轮减速机(背隙0.005rad/0.28°)。有效改善机器人的承载能力和低速效率,(至于这里减速比为什么选择6,网上有不少讨论,比如这篇文章MIT Mini Cheetah的关节驱动器为何选用减速比为6的单级内嵌式行星减速器? - 知乎,我个人比较倾向于,MIT在设计驱动器的时候,使用了成熟的商用驱动器,也算是一种妥协,机械狗的整个重量,结构布局可能都会受驱动器的影响,后期的Cheetah 3系列就采用了自研的驱动电机。)
使用电机驱动一体化的一大优点是,不需要额外的机械结构和昂贵的传感器就能做到力控。这是因为小减速箱的非线性误差可以忽略不计,因此直接使用电机的电流环和相应的减速比,就能得到驱动器端的输出扭矩。
以上的设计思路,就带来了一个极其紧凑、轻量化的驱动器整体集成效果,当然缺点也很明显,采用镂空减重设计,防水防尘比较麻烦。

机械狗电机结构图
使用到的相关齿轮箱和轴承的型号如下:
行星轮:Misumi GEFHB0.5-40-5-8-W3
太阳轮:Misumi GEABN0.5-20-8-K-4
环形齿轮: KHG SI0.5-100
滚动轴承: HK0408
下腿由通过的同步带驱动和上腿相连,提供额外的1.15减速比。可以旋转360度,
让机器人任意改变膝盖向前或向后的方向。而且同步带可以有效的缓冲猛烈的冲击,
具有很好的缓冲效果。髋关节可以连续旋转,仅受连接膝关节执行器的电线长度影响。
允许机器人倒着操作,爬上障碍物,或者用脚在身体上方操纵。四条腿的总重量为2.7千克,
只有机器人质量的30%。每条腿的末端有一个由10毫米厚的60A聚氨酯橡胶制成的盖子。
提供缓冲和抓地力。驱动器的参数:

电机设计完成后,如果加工组装完成还需要对电机进行一系列的测试,包括:
1)、扭矩测试、功率测试、效率图绘制,这里需要使用到扭矩测量仪。

2)、电流扭矩测试

左图:扭矩/电流特性 右图:扭矩常数/电流特性
3)、电角度校准(用于FOC算法调试)
另外电机采用的FOC控制,还要对电角度进行校准,FOC算法中一个重要的指标就是要知道电角度,电角度由磁编码器获得,由于电机摩擦和惯量的存在,实际运行时,它总是稍微滞后于参考角度,如下图左上角;位置传感器的偏心会引起低频纹波,如下图左下角;齿槽转矩又会引起高频纹波,如下图右上角;消除这些误差以后会建立一个表记录下来,只要磁编码器没有重新拆装,下次上电,表记录的数值依然有效,这样在程序运行的时候,可以通过查表来消除传感器误差。

磁编码器误差消除
4)、热分析
除此之外由于机械狗频繁的运动,还要对电机进行高温测试,防止电机高温消磁,高温报警等。

高温试验
4、结构优化
现在机械狗的基本构型就有了,现在我们最关心的还是腿部,希望腿部的惯性尽量的小,这里我们需要对腿部的结构进行拓扑优化,满足性能的同时,质量最小。需要用到有限元模拟软件ANSYS进行拓扑优化,特别是对质量要求比较苛刻,构件材料比较昂贵,这种就体现出了有限元仿真的价值,可以减少不少试错成本。


结构优化
5、尺寸效应
转自知乎网友的一段话
在关节式机器人爆发运动能力这方面,尺寸越大的机器人对驱动器的功率输出密度要求越高,技术实现也越困难。具体定量一点说:机器人尺寸假设扩大 � 倍,那么相应质量是 �3 量级的增长,而所需要驱动扭矩则是 �4 量级的增大。对于驱动器输出性能而言(现有的永磁体+线圈式电机,扭矩是�2的增长,就是4次方的增长与2次方增长的区别),增大机器人尺寸简直是噩梦,反之缩小机器人尺寸,能占很大的便宜。
6、其他
除上述分析以外,还有冲击性能分析,轴承载荷校准等,这些这里不做具体分析,详细可以见相关论文。
到此为止,一个完整的机械狗机械部分就有了雏形了。
相关文章:
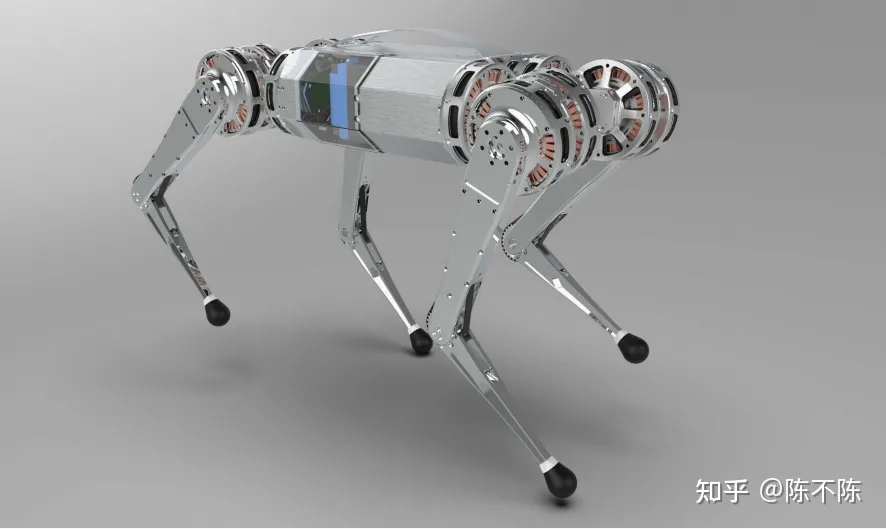
[机器人-2]:开源MIT Min cheetah机械狗设计(二):机械结构设计
目录 1、四肢朝向的选择 2、电机布局形式的选择 3、电机的选型及测试(非常重要) 4、结构优化 5、尺寸效应 6、其他 1、四肢朝向的选择 机械狗的结构设计,第一个摆在我们面前的就说四肢的朝向问题,如下图,我们是…...
用友U8+CRM help2 任意文件读取漏洞复现
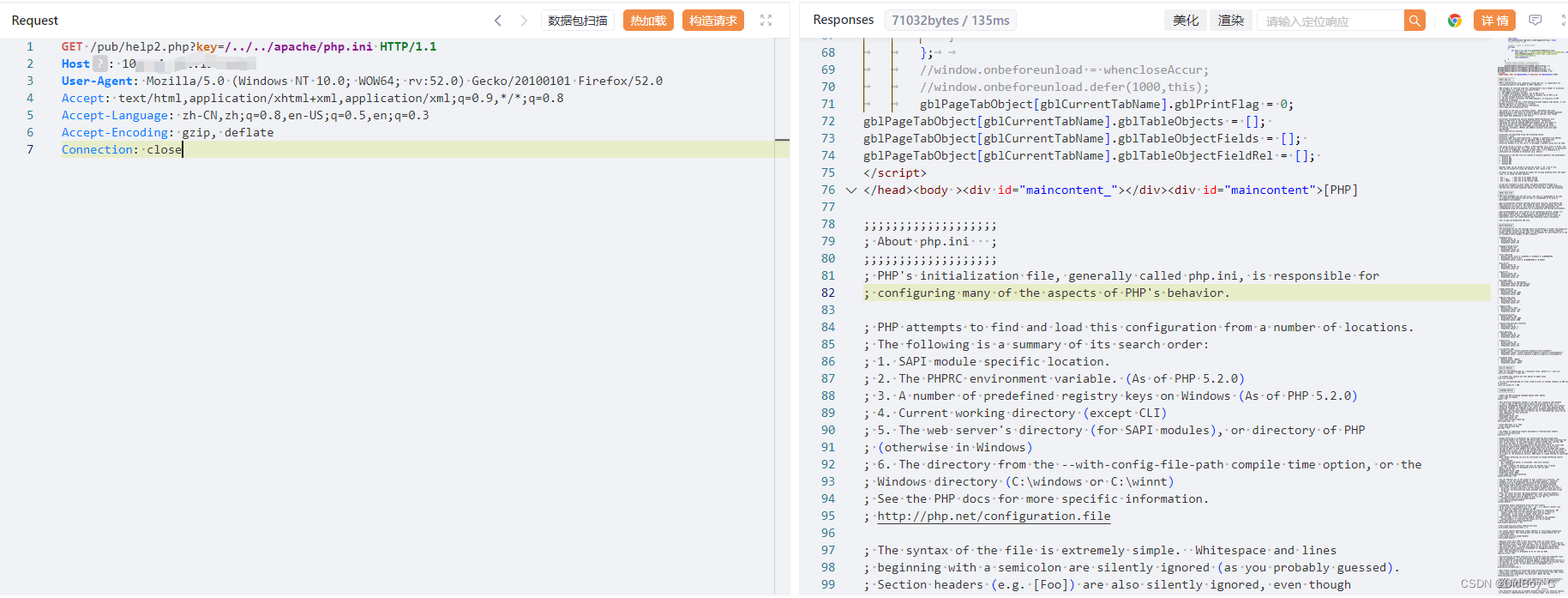
0x01 产品简介 用友U8 CRM客户关系管理系统是一款专业的企业级CRM软件,旨在帮助企业高效管理客户关系、提升销售业绩和提供优质的客户服务。 0x02 漏洞概述 用友 U8 CRM客户关系管理系统 help2接口处存在任意文件读取漏洞,攻击者通过漏洞可以获取到服…...
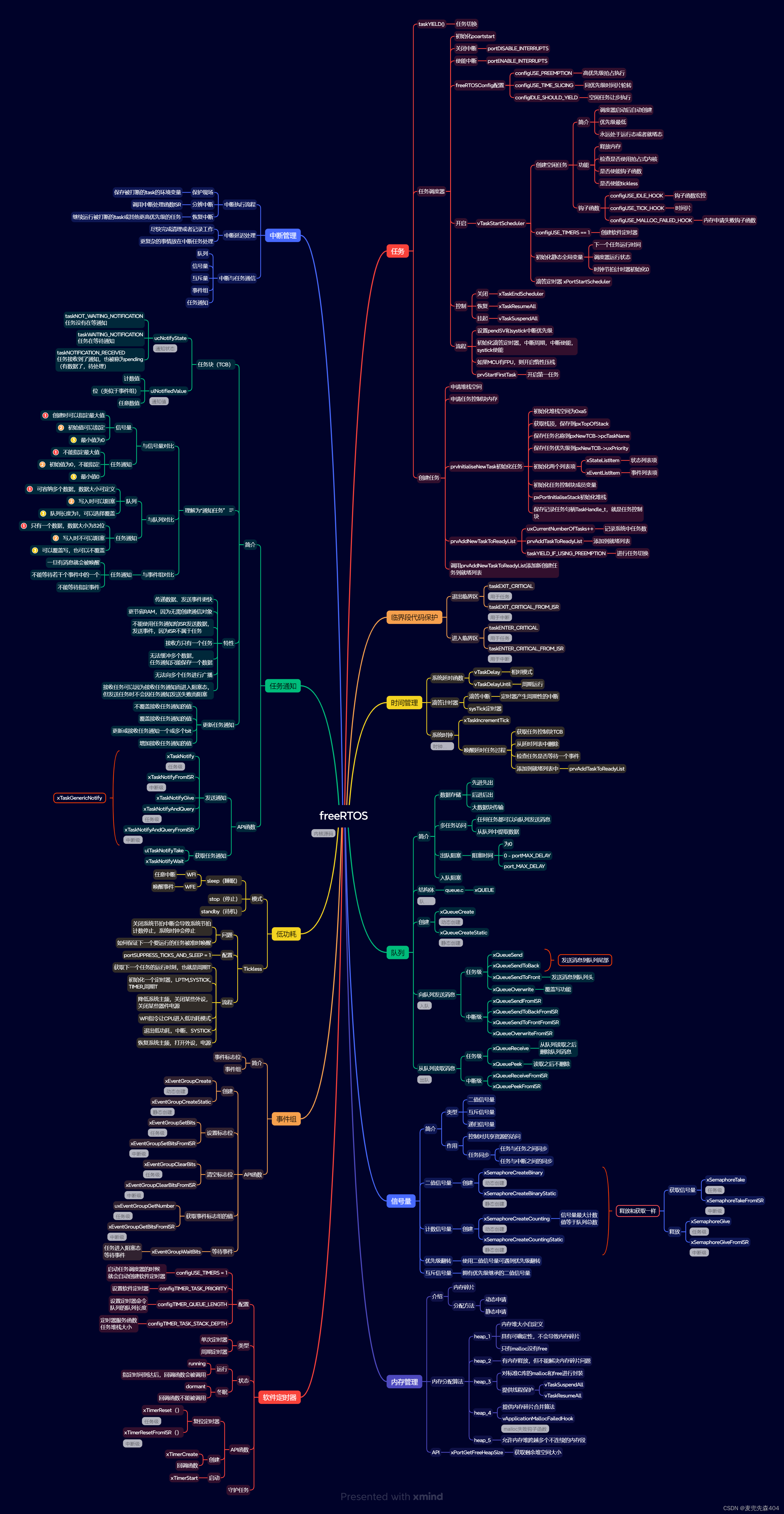
freeRTOS实时操作系统学习笔记
温馨提示:点击图片查看大图更清晰 —————————————————————————————↑↑↑上方资源下载后可获取xmind原文件。 1、freeRTOS移植和配置脑图 2、内核源码学习...
解决虚拟机卡顿、卡死、待机后不动的情况(真实有效
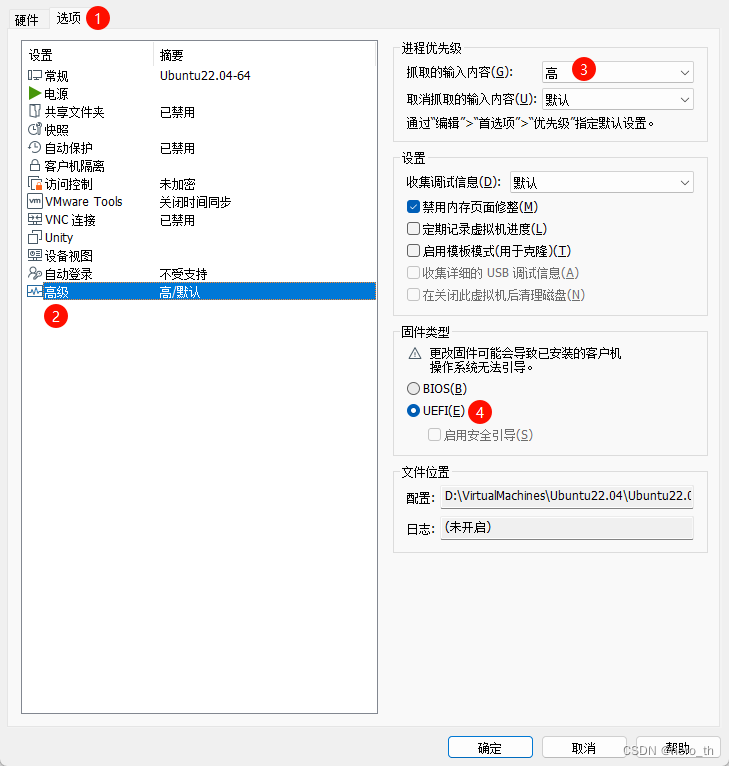
本人环境: VM workstation 17.5 ubuntu 22.04 虚拟机配置:4核 4g issue: 出现开机卡死不动运行一段时间,可能半小时不到,就页面卡死不动经常需要关机重启才解决,可能没有解决 1.配置虚拟化引擎 这一步我称…...
【MybatisPlus快速入门】(3)SpringBoot整合MybatisPlus 之 Lombok插件安装及MybatisPlus分页代码示例
目录 1.Lombok1.1 步骤1:添加lombok依赖 2.2 步骤2:安装Lombok的插件1.3 步骤3:模型类上添加注解2 分页功能2.1 步骤1:调用方法传入参数获取返回值2.2步骤2:设置分页拦截器2.3 步骤3:运行测试程序 之前我们已学习MyBatisPlus在代码示例与MyBatisPlus的简介,在这一节…...

SpaceDesk如何连接平板/PC(生产力副屏)
1、下载安装 分为安卓端和PC端,两个设备都需要安装对应的软件。 SpaceDesk官网 https://link.zhihu.com/?targethttp%3A//spacedesk.net/ 需要魔法上网。安装过程比较简单,无脑下一步即可。 我已经把安装包准备好了,如果不想自己找&#…...
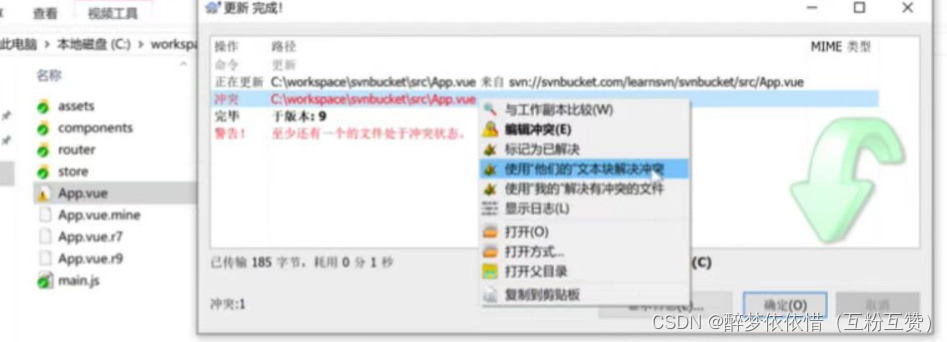
61.SVN版本控制系统
SVN(Subversion)是一种集中式版本控制系统,它有一个中央仓库用于存储代码库的完整历史记录。相对于分布式版本控制系统(例如 Git),SVN 不支持本地仓库。 一、SVN 安装。 (1)在windo…...
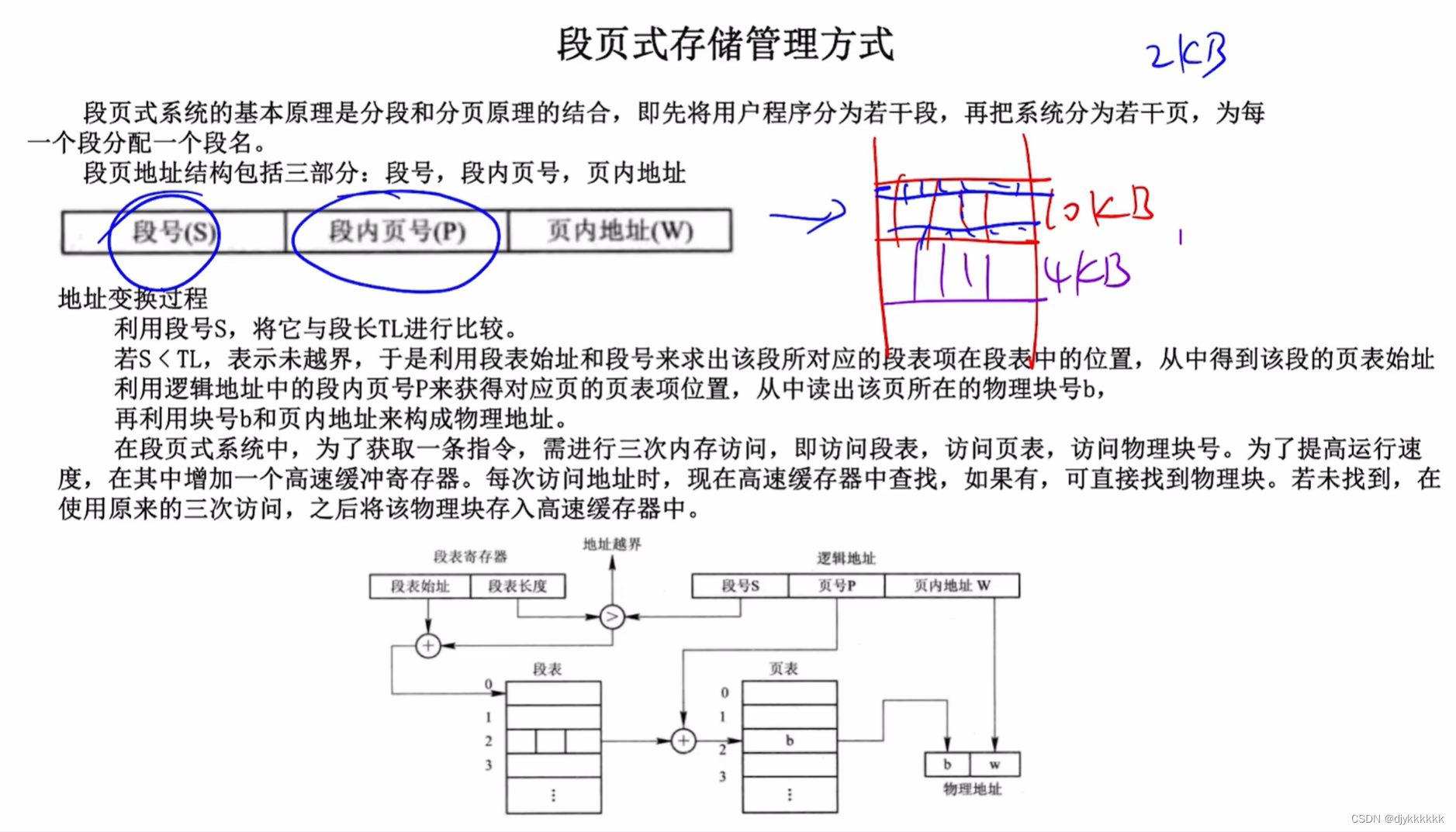
操作系统 内存管理篇
一.程序的装入和链接 装入方式: 链接方式: 二.进程的内存映像 三.内存的分配 1.连续分配 分配方式: 2.不连续分配 分页:页面大小一致 引入快表(和 cache 处理思路一致) 升级到二级页表 分段:…...
深度学习中用来训练的train.py 探究学习2.0( 数据预处理)
数据预处理 下列代码为train.py中常见的一些数据处理方法 train_transform transforms.Compose([transforms.Resize((224, 224)),transforms.RandomVerticalFlip(),# 随机旋转,-45度到45度之间随机选transforms.RandomRotation(45),# 从中心开始裁剪transforms.C…...
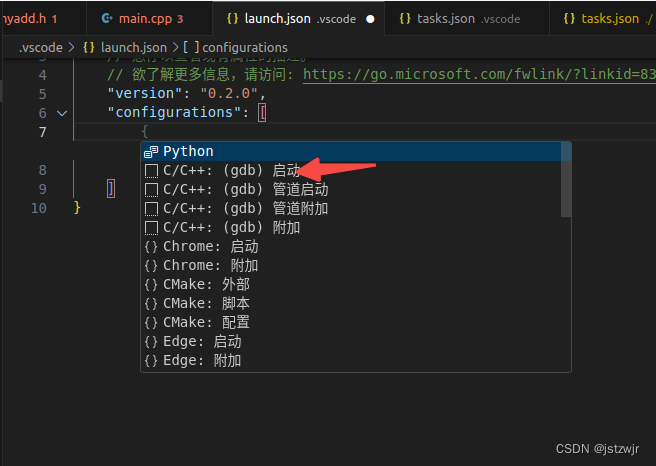
vscode debug c++代码
需要提前写好CMakeLists.txt 在tasks.json中写好编译的步骤,即tasks,如cmake … 和make -j 在lauch.json中配置可执行文件的路径和需要执行tasks中的哪一个任务 具体步骤: 1.写好c代码和CMakeLists.txt 2.配置tasks.json 终端–>配置任务…...

HarmonyOS的功能及场景应用
一、基本介绍 鸿蒙HarmonyOS主要应用的设备包括智慧屏、平板、手表、智能音箱、IoT设备等。具体来说,鸿蒙系统是一款面向全场景(移动办公、运动健康、社交通信、媒体娱乐等)的分布式操作系统,能够支持手机、平板、智能穿戴、智慧屏、车机等多种终端设备…...

汽车级EEPROM 存储器 M24C64-DRMN3TP/K是电可擦除可编程只读存储器?它的功能特性有哪些?
M24C64-DRMN3TP/K是一款64 Kbit串行EEPROM汽车级设备,工作温度高达125C。符合汽车标准AEC-Q100 1级规定的极高可靠性。 该设备可通过一个高达1MHz的简单串行I2C兼容接口访问。 存储器阵列基于先进的真EEPROM技术(电可擦除可编程存储器)。M2…...

VS Code无法远程ubuntu
①windows下cmd中执行命令: ssh-keygen -t rsa -C "xxxxxx.com" ②ubuntu 下bash 命令 ssh-keygen -t rsa -C "xxxxxx.com" ③cat id_rsa.pub >> ~/.ssh/authorized_keys ④ C:\Users\Administrator\AppData\Roaming\Code\User\set…...

大数据开发职业规划
大数据开发职业规划 我的学历是双非本,在学校学习的是大数据专业,目前是在企业做大数据全栈的工作,爬虫,数仓,风控项目,etl开发都做 .................................................................…...

XxIJob入门-示例
一、部署 xxlJob (一) 下载地址, git clone 到本地。 http://gitee.com/xuxueli0323/xxl-job https://github.com/xuxueli/xxl-job (二) 插入 xxl_job 的sql脚本: 在项目的 /xxl-job/doc/db/tables_xxl_job.sql ,找到sql脚本,…...
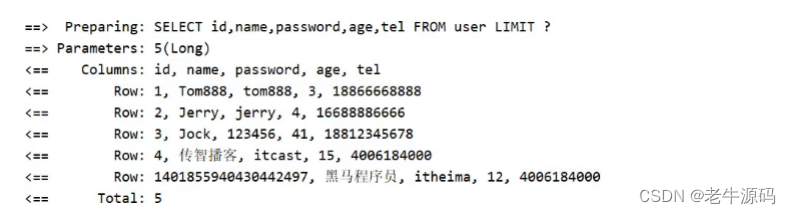
SQL题:1549. 每件商品的最新订单(难度:中等))
单挑力扣(LeetCode)SQL题:1549. 每件商品的最新订单(难度:中等)
相信很多学习SQL的小伙伴都面临这样的困境,学习完书本上的SQL基础知识后,一方面想测试下自己的水平;另一方面想进一步提升,却不知道方法。 其实,对于技能型知识,我的观点一贯都是:多练习、多实…...

Javacv-利用Netty实现推流直播复用(flv)
前言 上一篇文章《JavaCV之rtmp推流(FLV和M3U8)》介绍了javacv的基本使用,今天来讲讲如何实现推流复用。 以监控摄像头的直播为例,通常分为三步: 从设备获取音视频流利用javacv进行解码(例如flv或m3u8&am…...
)
cfa一级考生复习经验分享系列(十一)
理工科已经毕业,正在工作,毫无金融背景。一共准备了四个月,每天下班和周末抽时间看看。前三个月节奏比较松散,毕竟时不时有人叫我出去high,最后一个月认真看了看。 用到的资料 JC网课,官方Mock,…...

Nginx基本配置内容
http 模块适用于处理 Web 请求,而 stream 模块适用于处理非 HTTP 流量,如数据库连接、邮件传输等。 在 stream 模块中,你可以配置一些 TCP 或 UDP 的代理服务,以便 Nginx 能够转发这些流量。 与网站相关的 关于网站相关的要写在ht…...
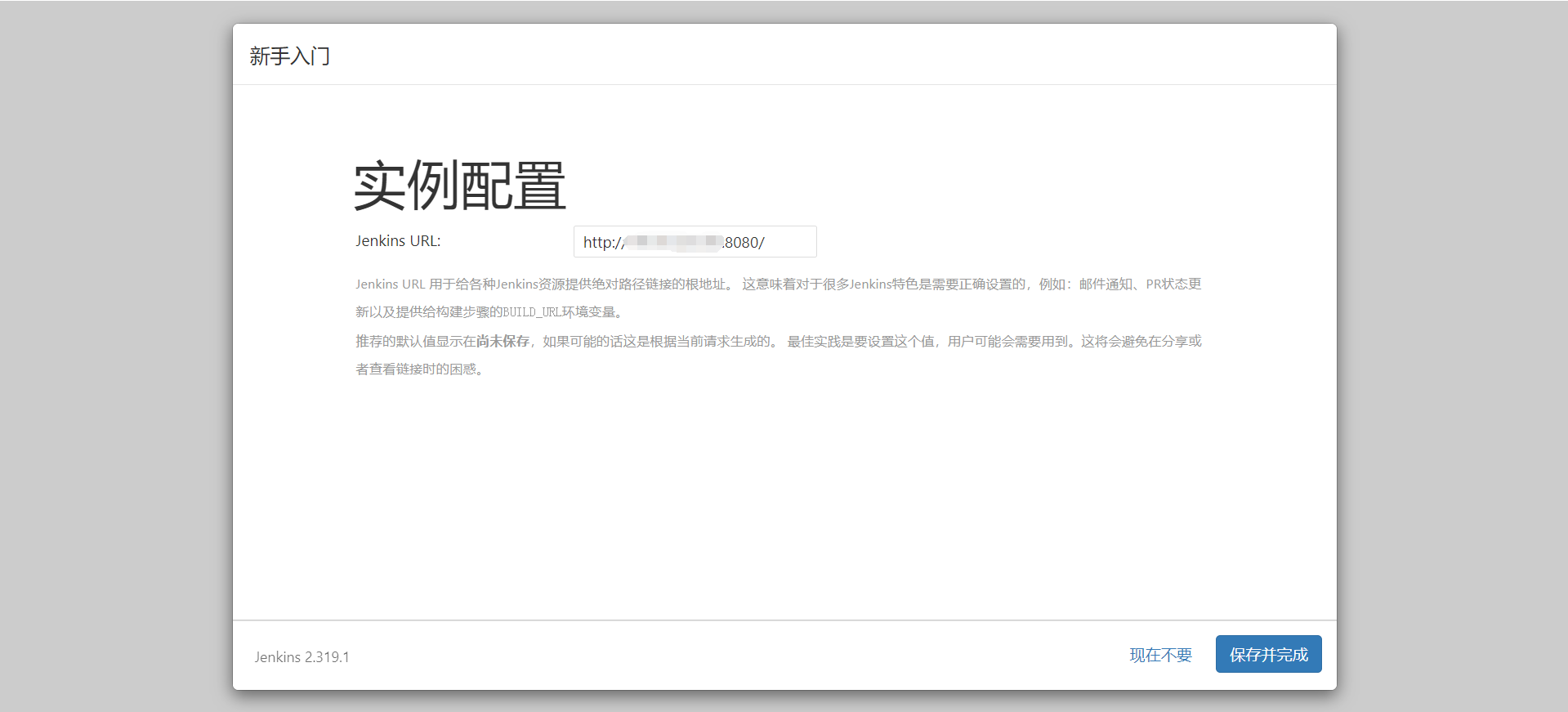
Jenkins安装与设置(插件安装失败,版本问题解决)
早期的使用docker安装jenkins的方法会出现插件无法安装的问题,是由于docker拉取的jenkins版本太低了 jdk安装 Linux系统安装JDK1.8 详细流程 maven安装: centos7下安装Maven 使用docker进行安装jenkins: 先把镜像和容器卸干净 docker ps -a…...

避坑指南:QGraphicsView自适应缩放时,为什么你的Item总对不齐或留白?
避坑指南:QGraphicsView自适应缩放时Item对齐与留白问题深度解析 在Qt图形界面开发中,QGraphicsView框架因其强大的2D显示能力被广泛应用。但当开发者尝试实现视图内容的自适应缩放时,经常会遇到一个令人头疼的问题——调用fitInView后&#…...
)
用FM收音机也能玩双声道?手把手教你复刻电赛G题双路语音同传系统(48.5MHz频点)
用FM收音机玩转双声道:48.5MHz双路语音同传系统实战指南 在电子设计竞赛中,双路语音同传系统一直是考验学生综合能力的经典题型。但你知道吗?这套看似专业的无线收发系统,其实可以用身边最常见的FM收音机来验证和体验。本文将带你…...

终极指南:如何快速解决LaTeX中文排版字体问题
终极指南:如何快速解决LaTeX中文排版字体问题 【免费下载链接】latex-chinese-fonts Simplified Chinese fonts for the LaTeX typesetting. 项目地址: https://gitcode.com/gh_mirrors/la/latex-chinese-fonts 还在为LaTeX中文排版时遇到的字体缺失、样式混…...
)
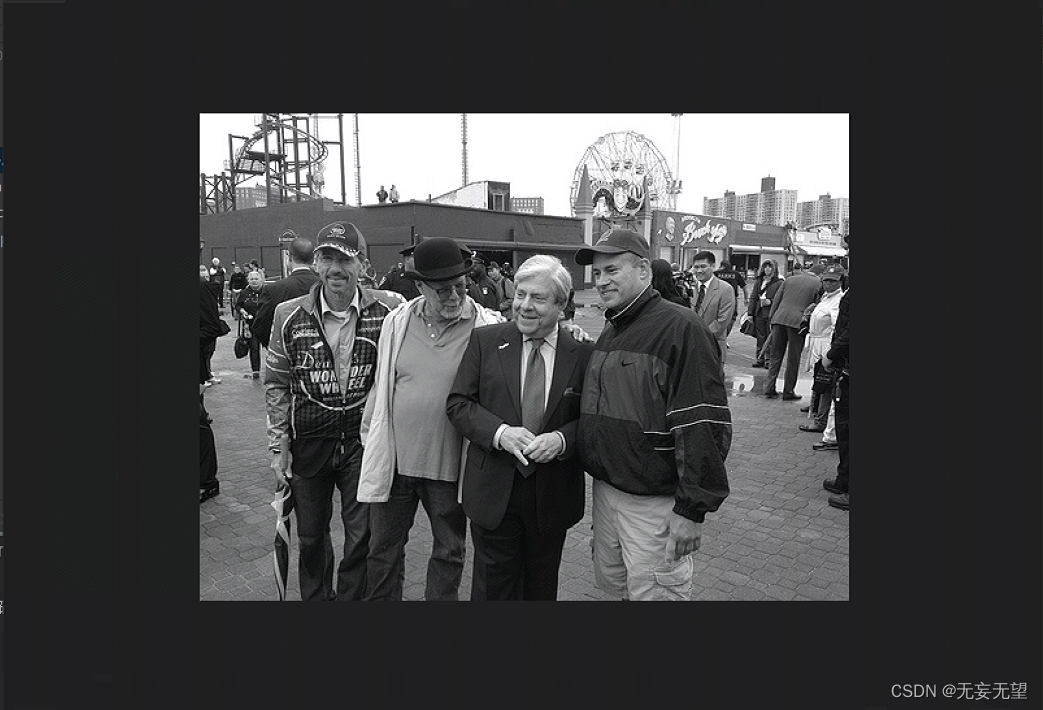
从布列松决定性瞬间到AI生成:Midjourney黑白摄影风格构建方法论(附可复用的5层Prompt结构模板)
更多请点击: https://intelliparadigm.com 第一章:从布列松决定性瞬间到AI生成的范式迁移 亨利卡蒂埃-布列松提出的“决定性瞬间”强调在精确的时间、空间与形式三重统一中捕捉不可复制的真实。这一美学范式统治摄影近百年,其内核是人类对意…...

物业临时工排班管理的技术破局:栎偲考勤神器的AI与离线方案详解
物业行业临时工排班管理长期面临三大技术痛点:人员流动性大导致班制匹配混乱、多场景打卡数据碎片化、中小企业部署成本高。作为专注考勤工具实测的博主,今天拆解栎偲考勤神器如何通过AI算法与轻量化技术,针对性解决物业临时工排班管理的核心…...

十六呀,今天对我们都是很特殊的一天吧
今天对你坦白了 不是表白,是坦白 说了一些你早就知道的话 我说我想放下了 我说交给时间 不是我真的想放下 是我没有别的选择了 就做好朋友吧 如果你还愿意的话 我们会是很好的朋友 放下吧,如果真的可以,真的甘心的话。 好久好久之后 也许真的…...

财联支付申请开通的门槛门槛高不高?
在数字支付蓬勃发展的当下,支付方式的便捷性和安全性成为了商户和消费者关注的焦点。财联支付作为数字支付领域的佼佼者,以其创新的技术和优质的服务吸引了众多商户的目光。然而,很多人对于财联支付申请开通的门槛存在疑问,究竟它…...

终极CH55xduino指南:5分钟构建低成本USB微控制器项目
终极CH55xduino指南:5分钟构建低成本USB微控制器项目 【免费下载链接】ch55xduino An Arduino-like programming API for the CH55X 项目地址: https://gitcode.com/gh_mirrors/ch/ch55xduino CH55xduino为CH55X系列低成本MCS51 USB微控制器提供了完整的Ardu…...

MobaXterm远程桌面实战:在Ubuntu上配置与连接RDP服务
1. 为什么选择MobaXterm连接Ubuntu远程桌面 作为一名常年和Linux服务器打交道的开发者,我深知纯命令行操作有时会遇到效率瓶颈。特别是当需要处理图形界面应用或者进行复杂配置时,SSH终端就显得力不从心了。这时候,RDP远程桌面协议就成了救命…...

G-Helper风扇控制终极指南:从静音办公到狂暴游戏的全场景调校
G-Helper风扇控制终极指南:从静音办公到狂暴游戏的全场景调校 【免费下载链接】g-helper Lightweight Armoury Crate alternative for Asus laptops with nearly the same functionality. Works with ROG Zephyrus, Flow, TUF, Strix, Scar, ProArt, Vivobook, Zenb…...