python 通过opencv及face_recognition识别人脸
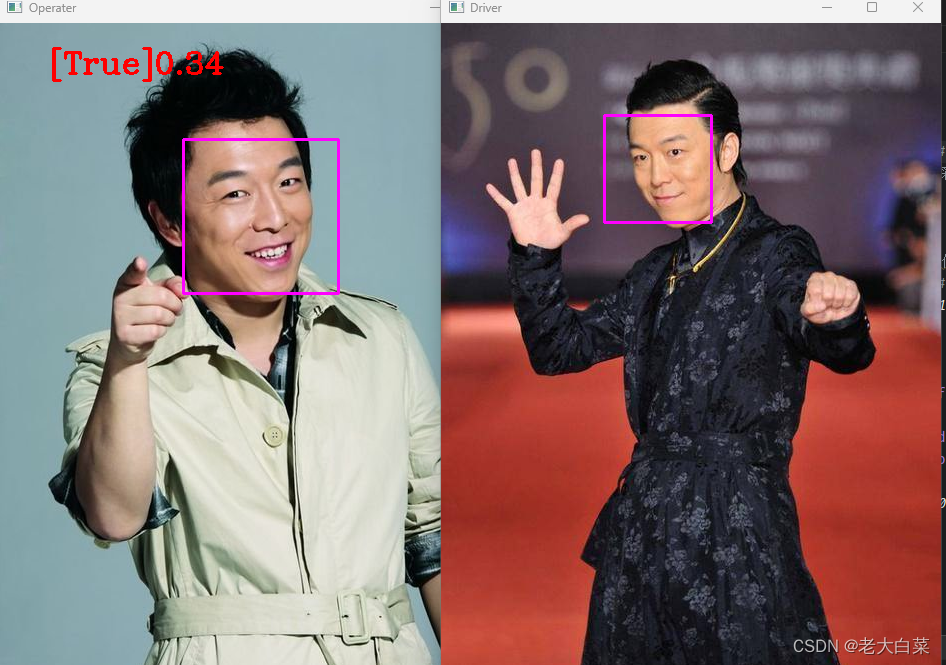
效果:
使用Python的cv2库和face_recognition库来进行人脸检测和比对的
0是代表一样
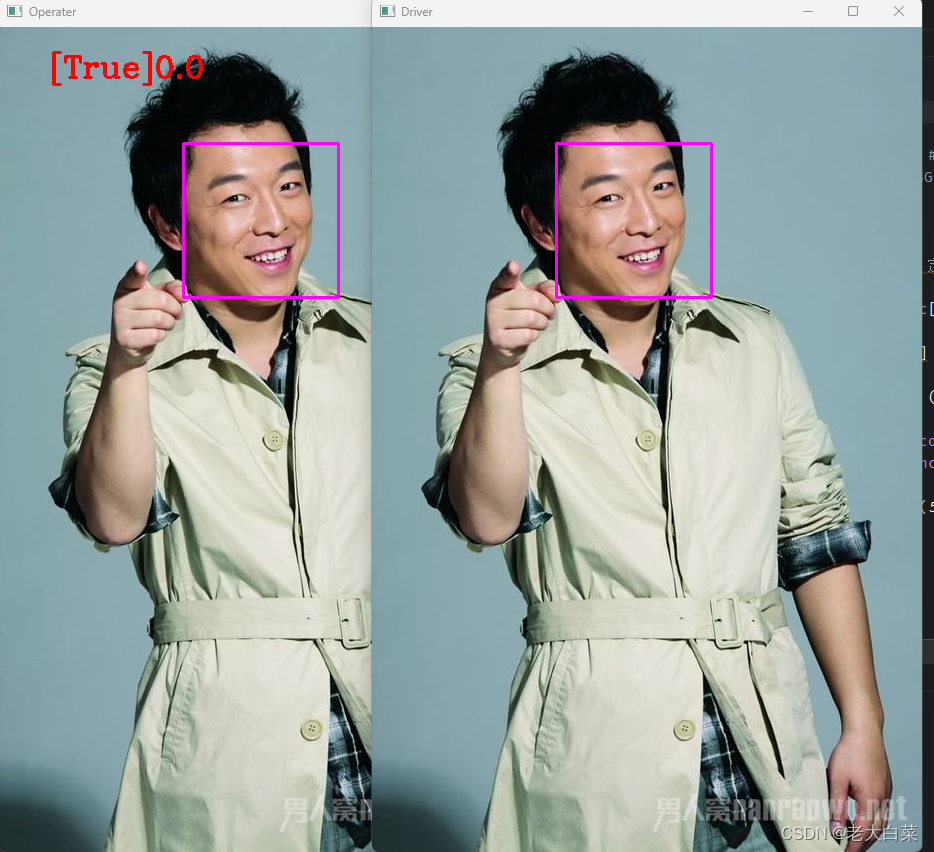 认为是同一人。
认为是同一人。
代码:
pip install opencv-python
pip install face_recognition
# 导入cv2库,用于图像处理
import cv2
# 导入face_recognition库,用于人脸识别
import face_recognition# 使用face_recognition库加载名为'face1.jpeg'的图片,并存储在reference_image变量中
reference_image = face_recognition.load_image_file('face1.jpeg')
# 使用cv2库将BGR彩色图像转化为RGB彩色图像,因为face_recognition库需要RGB格式的图像
reference_image = cv2.cvtColor(reference_image, cv2.COLOR_BGR2RGB)# 同样地,加载另一张名为'face3.jpg'的图片,并存储在test_image变量中
test_image = face_recognition.load_image_file('face3.jpg')
# 也将其从BGR格式转化为RGB格式
test_image = cv2.cvtColor(test_image, cv2.COLOR_BGR2RGB)# 使用face_recognition库定位reference_image图片中的人脸位置,返回的是一个列表,其中每个元素代表一个人脸的位置
# 这里我们假设只有一个人脸,所以直接取第一个元素
reference_face_location = face_recognition.face_locations(reference_image)[0]
# 提取reference_image图片中人脸的面部特征,返回一个列表,每个元素代表一个人脸的特征编码
# 同样地,我们假设只有一个人脸,所以直接取第一个元素
reference_face_encoding = face_recognition.face_encodings(reference_image)[0]# 在reference_image图片上框出人脸位置,使用紫色矩形框表示
cv2.rectangle(reference_image, (reference_face_location[3], reference_face_location[0]),(reference_face_location[1], reference_face_location[2]), (255, 0, 255), 2)# 对另一张图片test_image也做同样的人脸定位和特征提取操作
test_face_location = face_recognition.face_locations(test_image)[0]
test_face_encoding = face_recognition.face_encodings(test_image)[0]
# 在test_image图片上也框出人脸位置
cv2.rectangle(test_image, (test_face_location[3], test_face_location[0]),(test_face_location[1], test_face_location[2]), (255, 0, 255), 2)# 使用face_recognition库比较两个人脸的相似度,返回一个布尔值列表,表示每张测试图片是否与已知人脸匹配
# 这里我们只有一个测试人脸和一个已知人脸,所以直接取列表的第一个元素作为结果
is_same_person = face_recognition.compare_faces([reference_face_encoding], test_face_encoding)[0]
# 计算两个人脸的欧氏距离,返回一个浮点数列表,表示每张测试图片与已知人脸的距离
# 同样地,我们直接取第一个元素作为结果
euclidean_distance = face_recognition.face_distance([reference_face_encoding], test_face_encoding)[0]# 打印相似度结果和欧氏距离
print(is_same_person, euclidean_distance)
# 在test_image图片上显示比对结果,包括相似度(True或False)和欧氏距离(保留两位小数)
cv2.putText(test_image, f'{is_same_person}{round(euclidean_distance, 2)}', (50, 50), cv2.FONT_HERSHEY_COMPLEX, 1,(0, 0, 255), 2)# 使用cv2库的imshow函数显示两张图片,分别命名为'Driver'和'Operator'
cv2.imshow('Driver', reference_image)
cv2.imshow('Operator', test_image)# 等待用户按键操作,参数0表示无限等待,直到用户按下一个键
key = cv2.waitKey(0)
# 如果用户按下的是ESC键(ASCII码为27),则关闭所有打开的窗口
if key == 27:cv2.destroyAllWindows()
相关文章:
python 通过opencv及face_recognition识别人脸
效果: 使用Python的cv2库和face_recognition库来进行人脸检测和比对的 0是代表一样 认为是同一人。 代码: pip install opencv-python pip install face_recognition# 导入cv2库,用于图像处理 import cv2 # 导入face_recognition库&#…...

Android开发中常见的Hook技术有哪些?
Hook技术介绍 Hook技术是一种在软件开发中常见的技术,它允许开发者在特定的事件发生时插入自定义的代码逻辑。常见的应用场景包括在函数调用前后执行特定的操作,或者在特定的事件发生时触发自定义的处理逻辑。 在Android开发中,Hook通常是通…...

【linux c多线程】线程的创建,线程信息的获取,获取线程返回值
线程创建 专栏内容: 参天引擎内核架构 本专栏一起来聊聊参天引擎内核架构,以及如何实现多机的数据库节点的多读多写,与传统主备,MPP的区别,技术难点的分析,数据元数据同步,多主节点的情况下对…...

MFC或QT中,自绘控件的目的和实现步骤
MFC自绘控件的步骤 自绘控件的目的是为了能够自定义控件的外观、行为和交互方式,以满足特定的需求,同时增强应用程序的用户体验。 实现步骤如下: 1、创建一个继承自MFC控件基类(如CButton、CStatic等)的自定义控件类…...
)
ceph集群搭建详细教程(ceph-deploy)
ceph-deploy比较适合生产环境,不是用cephadm搭建。相对麻烦一些,但是并不难,细节把握好就行,只是命令多一些而已。 实验环境 服务器主机public网段IP(对外服务)cluster网段IP(集群通信&#x…...

机器视觉系统选型-避免畸变
在定位及高精度测量的系统中,镜头畸变的影响尤其重要 • 使用远心镜头 • 进行系统标定...
的原理和应用)
机器学习笔记 - 线性判别分析(LDA)的原理和应用
一、LDA简述 线性判别分析(LDA)是监督机器学习中用于解决多类分类问题的一种方法。LDA通过数据降维来分离具有多个特征的多个类。这项技术在数据科学中很重要,因为它有助于优化机器学习模型。 线性判别分析,也称为正态判别分析 (NDA) 或判别函数分析 (DFA),遵循生成模型框…...
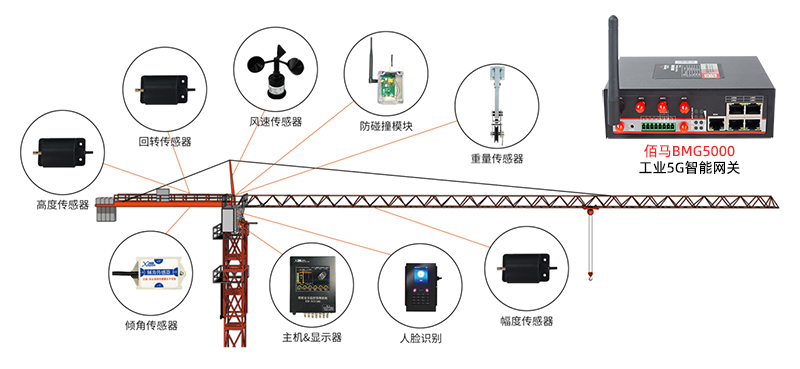
基于5G智能网关的智慧塔吊监测方案
塔吊是建筑施工中必不可少的设施,由于塔吊工作重心高、起重载荷大、人工视距/视角受限等因素,也使得塔吊在工作过程中着较多的危险因素。对此,可以部署基于工业5G智能网关搭建智慧塔吊安全监测系统,实现对塔吊运行的全局精细监测感…...

CountDownLatch详解以及用法示例
一、什么是CountDownLatch CountDownLatch中count down是倒数的意思,latch则是门闩的含义。整体含义可以理解为倒数的门栓。 CountDownLatch的作用也是如此,在构造CountDownLatch(int count):的时候需要传入一个整数count,在这个…...

【http】缓存协议
✨ 专栏介绍 在当今互联网时代,计算机网络已经成为了人们生活和工作中不可或缺的一部分。而要实现计算机之间的通信和数据传输,就需要依靠各种网络协议来进行规范和约束。无论是浏览网页、发送电子邮件还是进行在线交流,都离不开各种各样的网…...
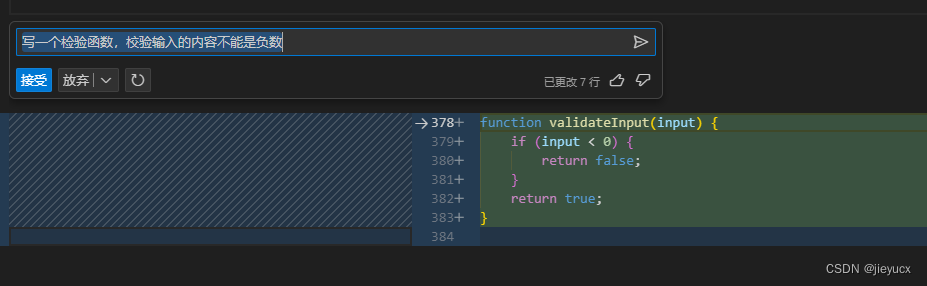
vscode中使用GitHub Copilot Chat
文章目录 一、什么是Github Copilot Chat二、安装使用三、如何使用1. 聊天功能2. 内联功能 一、什么是Github Copilot Chat GitHub Copilot Chat 由 OpenAI 的 GPT-4 大型多模态模型提供支持,能带来更准确的代码建议、解释和指导。GitHub Copilot Chat 的内联功能可…...

lvgl 双物理显示器的驱动实现
目录 一、背景 1. 要实现的功能2. lvgl 版本 二、简单粗暴的方式 理论上可以这样实现缺陷: 三、lvgl 自身机制支持 3.1 实现思路3.2 初始化缓冲区和注册显示驱动 3.2.1 复制lv_port_disp → lv_port_disp_23.2.2 修改 lv_port_disp_2 文件3.2.3 在应用层调用显示器…...

论文阅读——X-Decoder
Generalized Decoding for Pixel, Image, and Language Towards a Generalized Multi-Modal Foundation Model 1、概述 X-Decoder没有为视觉和VL任务开发统一的接口,而是建立了一个通用的解码范式,该范式可以通过采用共同的(例如语义&#…...
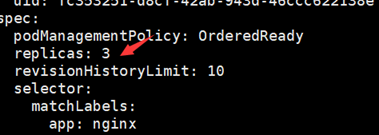
【Kubernetes】控制器Statefulset
Statefulset控制器 一、概念二、Statefulset资源清单文件编写技巧2.1、查看定义Statefulset资源需要的字段2.2、查看statefulset.spec字段如何定义2.3、查看statefulset的spec.template字段如何定义 三、Statefulset使用案例:部署web站点3.1、编写一个Statefulset资…...

智能优化算法应用:基于鱼鹰算法3D无线传感器网络(WSN)覆盖优化 - 附代码
智能优化算法应用:基于鱼鹰算法3D无线传感器网络(WSN)覆盖优化 - 附代码 文章目录 智能优化算法应用:基于鱼鹰算法3D无线传感器网络(WSN)覆盖优化 - 附代码1.无线传感网络节点模型2.覆盖数学模型及分析3.鱼鹰算法4.实验参数设定5.算法结果6.参考文献7.MA…...
 骨架屏)
探索 Vue3 (五) 骨架屏
骨架屏是页面的一个空白版本,通常会在页面完全渲染之前,通过一些灰色的区块大致勾勒出轮廓,待数据加载完成后,再替换成真实的内容。 目前主流 UI库 都有骨架屏,如 Element-UI、Antd 可以看到使用起来非常简单&#x…...

java取出list中的某几个属性组成一个新的集合的几种方式
我用了三种方式,1:forEach循环;2:for循环;3:stream方法 package org.springblade.test;import java.util.ArrayList; import java.util.HashMap; import java.util.List; import java.util.Map; import java.util.stream.Collectors;public class Test {org.junit.jupiter.api…...
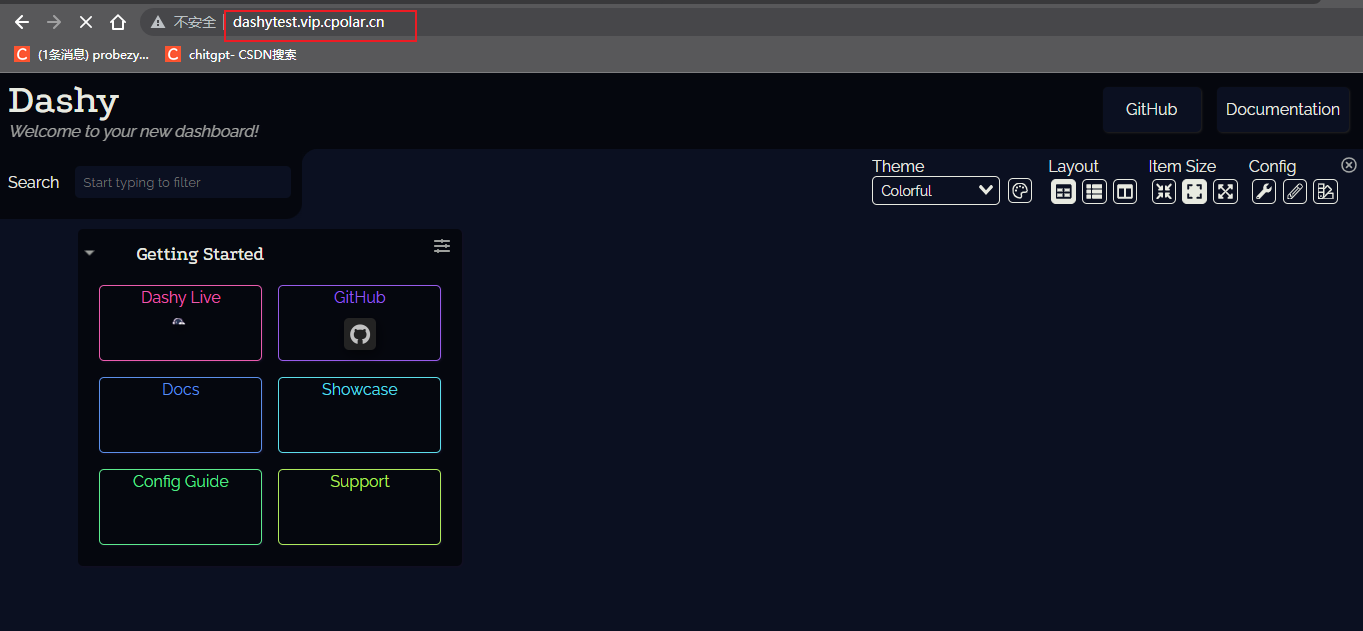
开源自托管导航页配置服务Dashy本地搭建结合内网穿透远程访问
开源自托管导航页配置服务Dashy本地搭建结合内网穿透远程访问 简介1. 安装Dashy2. 安装cpolar3.配置公网访问地址4. 固定域名访问 简介 Dashy 是一个开源的自托管的导航页配置服务,具有易于使用的可视化编辑器、状态检查、小工具和主题等功能。你可以将自己常用的一…...
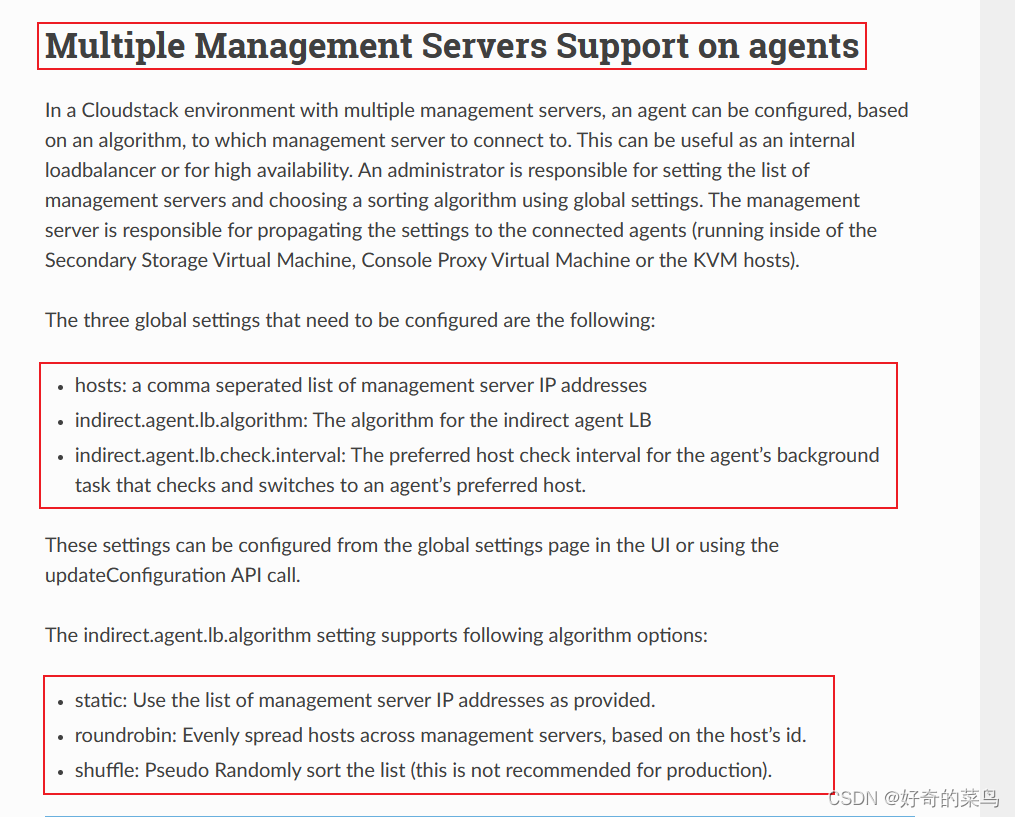
Cloudstack多个管理服务器节点
https://docs.cloudstack.apache.org/en/4.18.0.0/adminguide/reliability.html 参考翻译: 代理上支持多个管理服务器 在具有多个管理服务器的Cloudstack环境中,可以根据算法配置代理,将其连接到哪个管理服务器。这对于内部负载均衡器或高可…...
31. Ajax
简介 AJAX 是 Asynchronous JavaScript And XML 的简称。直译为,异步的JS和XML。AJAX的实际意义是,不发生页面跳转、异步载入内容并改写页面内容的技术。AJAX也可以简单的理解为通过JS向服务器发送请求。 AJAX这门技术很早就被发明,但是直到…...

AISuperDomain:构建AI API智能网关,解决网络延迟与高可用难题
1. 项目概述与核心价值最近在折腾一些自动化脚本和本地化AI应用时,我遇到了一个挺普遍但又有点烦人的问题:如何让我的程序能稳定、高效地访问那些部署在境外的AI服务API,比如OpenAI、Claude或者一些开源的模型托管平台。直接调用?…...

如何用BilibiliDown轻松下载B站视频:3分钟掌握完整操作指南
如何用BilibiliDown轻松下载B站视频:3分钟掌握完整操作指南 【免费下载链接】BilibiliDown (GUI-多平台支持) B站 哔哩哔哩 视频下载器。支持稍后再看、收藏夹、UP主视频批量下载|Bilibili Video Downloader 😳 项目地址: https://gitcode.com/gh_mirr…...

AI编码工具集:提升开发效率的智能助手选型与应用指南
1. 项目概述:为什么我们需要一个AI编码工具集?如果你和我一样,每天大部分时间都在和代码打交道,那你肯定对这样的场景不陌生:面对一个复杂的业务逻辑,你卡在某个函数的设计上,反复调试却找不到最…...

现代前端项目模板:从工程化配置到最佳实践全解析
1. 项目概述:一个现代前端开发的起点在接手一个新项目,特别是前端项目时,最耗时的往往不是核心业务逻辑的开发,而是那些重复性的基础搭建工作:配置构建工具、集成代码规范、设置路由和状态管理、搭建基础布局组件……每…...

【BMC】OpenBMC开发进阶:从零构建自定义Layer与集成应用
1. OpenBMC自定义Layer开发入门 第一次接触OpenBMC的开发者常会困惑:如何在现有框架下快速集成自己的硬件平台和应用?这就像装修房子,OpenBMC提供了毛坯房(基础框架),我们需要根据户型(硬件&…...

GraphGym高级特性:动态图学习与多任务图神经网络
GraphGym高级特性:动态图学习与多任务图神经网络 【免费下载链接】GraphGym Platform for designing and evaluating Graph Neural Networks (GNN) 项目地址: https://gitcode.com/gh_mirrors/gr/GraphGym GraphGym是一个强大的图神经网络(GNN&am…...

答辩 PPT 熬到凌晨?PaperXie 用 AI 把你的毕业焦虑,变成 10 分钟的从容
paperxie-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPThttps://www.paperxie.cn/ppt/createhttps://www.paperxie.cn/ppt/create 你有没有过这样的时刻:答辩前一周,论文终于定稿,转头却卡在了 PPT 上。翻遍网盘里的答辩…...

别再封装IP了!Vivado里直接拖拽.v文件到Block Design的偷懒技巧
Vivado高效开发:直接拖拽.v文件到Block Design的实战技巧 在FPGA开发中,Vivado的Block Design图形化界面极大提升了设计效率,但传统IP封装流程往往成为快速迭代的瓶颈。当RTL代码需要频繁调整时,每次修改都重新封装IP核不仅耗时&…...

Docusaurus技能库插件:打造动态技术栈展示面板
1. 项目概述:一个为Docusaurus注入灵魂的技能库插件如果你正在使用Docusaurus构建技术文档、博客或知识库,并且希望站点不仅仅是静态内容的堆砌,而是能动态展示你或你团队的技术栈、技能熟练度,那么rio225/docusaurus-skill这个项…...

MCP服务器开源集市:AI智能体开发者的插件生态与实战指南
1. 项目概述:MCP服务器的开源集市最近在折腾AI智能体开发,特别是想让它们能更“主动”地去获取和处理外部信息,而不是仅仅依赖训练好的模型参数。在这个过程中,一个绕不开的概念就是模型上下文协议。简单来说,它就像给…...