华清远见嵌入式学习——ARM——作业3
作业要求:
代码效果图:

代码:
led.h
#ifndef __LED_H__
#define __LED_H__#define RCC_GPIO (*(unsigned int *)0x50000a28)
#define GPIOE_MODER (*(unsigned int *)0x50006000)
#define GPIOF_MODER (*(unsigned int *)0x50007000)
#define GPIOE_OTYPER (*(unsigned int *)0x50006004)
#define GPIOF_OTYPER (*(unsigned int *)0x50007004)
#define GPIOE_OSPEEDR (*(unsigned int *)0x50006008)
#define GPIOF_OSPEEDR (*(unsigned int *)0x50007008)
#define GPIOE_PUPDR (*(unsigned int *)0x5000600C)
#define GPIOF_PUPDR (*(unsigned int *)0x5000700c)
#define GPIOE_ODR (*(unsigned int *)0x50006014)
#define GPIOF_ODR (*(unsigned int *)0x50007014)void all_led_init();
void led1_on();
void led1_off();
void led2_on();
void led2_off();
void led3_on();
void led3_off();#endifled.c
#include "led.h"
void all_led_init()
{RCC_GPIO |= (0X3<<4);//时钟使能GPIOE_MODER &=(~(0X3<<20));//设置PE10输出GPIOE_MODER |= (0X1<<20);//设置PE10为推挽输出GPIOE_OTYPER &=(~(0x1<<10));//PE10为低速输出GPIOE_OSPEEDR &= (~(0x3<<20));//设置无上拉下拉GPIOE_PUPDR &= (~(0x3<<20));//LED2GPIOF_MODER &=(~(0X3<<20));//设置Pf10输出GPIOF_MODER |= (0X1<<20);//设置Pf10为推挽输出GPIOF_OTYPER &=(~(0x1<<10));//Pf10为低速输出GPIOF_OSPEEDR &= (~(0x3<<20));//设置无上拉下拉GPIOF_PUPDR &= (~(0x3<<20));//LED3GPIOE_MODER &=(~(0X3<<16));//设置PE8输出GPIOE_MODER |= (0X1<<16);//设置PE8为推挽输出GPIOE_OTYPER &=(~(0x1<<8));//PE8为低速输出GPIOE_OSPEEDR &= (~(0x3<16));//设置无上拉下拉GPIOE_PUPDR &= (~(0x3<<16));
}
void led1_on()
{GPIOE_ODR |= (0x1<<10);
}void led1_off()
{GPIOE_ODR &= (~(0x1<<10));
}
void led2_on()
{GPIOF_ODR |= (0x1<<10);
}void led2_off()
{GPIOF_ODR &= (~(0x1<<10));
}
void led3_on()
{GPIOE_ODR |= (0x1<<8);
}void led3_off()
{GPIOE_ODR &= (~(0x1<<8));
}uart.h
#ifndef __UART4_H__
#define __UART4_H__
#include"stm32mp1xx_rcc.h"
#include"stm32mp1xx_gpio.h"
#include"stm32mp1xx_uart.h"void uart4_config();
void putchar(char a);
char getchar();
void gets(char *s);
void puts(char *s);
int strcmp(char *s1,char *s2);
#endifuart.c
#include"uart4.h"//uart4的相关配置
void uart4_config()
{//1.使能GPIOB\GPIOG\UART4外设时钟RCC->MP_AHB4ENSETR |= (0x1<<1);//gpiobRCC->MP_AHB4ENSETR |= (0x1<<6);//gpiogRCC->MP_APB1ENSETR |= (0x1<<16);//uart4//2.设置PB2\PG11用于UART4的管脚复用//设置PG11GPIOG->MODER &= (~(0x3<<22));GPIOG->MODER |= (0x2<<22);GPIOG->AFRH &= (~(0xf<<12));GPIOG->AFRH |= (0x6<<12);//设置PB2GPIOB->MODER &= (~(0x3<<4));GPIOB->MODER |= (0x2<<4);GPIOB->AFRL &= (~(0xF<<8));GPIOB->AFRL |= (0x8<<8);//禁用串口USART4->CR1 &= (~0x1);//3.设置数据位宽为8位USART4->CR1 &= (~(0x1<<12));USART4->CR1 &= (~(0x1<<28));//4.设置无奇偶校验位USART4->CR1 &= (~(0x1<<10));//5.设置16倍过采样USART4->CR1 &= (~(0x1<<15));//6.设置1位停止位USART4->CR2 &= (~(0x3<<12));//7.设置不分频USART4->PRESC &= (~0xf);//8.设置波特率为115200USART4->BRR=0X22B;//9.使能发送器USART4->CR1 |= (0x1<<3);//10.使能接收器USART4->CR1 |= (0x1<<2);//11.使能串口USART4->CR1 |= (0x1);
}void putchar(char a)
{//1.先判断发送器是否为空,不为空等待while(!(USART4->ISR &(0x1<<7)));//2.向发送寄存器写入数据USART4->TDR=a;//3.等待发送完成while(!(USART4->ISR &(0x1<<6)));
}char getchar()
{char a;//1.判断接收器是否有准备好的数据,没有就等待while(!(USART4->ISR &(0x1<<5)));//2.读取数据a=USART4->RDR;//3.返回return a;
}//发送一个字符串
void puts(char *s)
{while(*s){putchar(*s);s++;}putchar('\r');putchar('\n');
}//接收一个字符串
void gets(char *s)
{while(1){*s=getchar();putchar(*s);//键盘输入的内容在串口上回显if(*s=='\r')break;s++;}*s='\0';}//实现字符串比较
int strcmp(char *s1,char *s2)
{int i = 0;while(((*(s1+i))==(*(s2+i)))){i++;if( (*(s1+i)=='\0')){break;}}int sub = ((*(s1+i))-(*(s2+i)));if(sub>0){return sub;}else if(sub<0){return sub;}else{return 0; }
}main.c
#include "uart4.h"
#include "led.h"int main()
{char buf[128];char *ledon1 = "led1on";char *ledon2 = "led2on";char *ledon3 = "led3on";char *ledoff1 = "led1off";char *ledoff2 = "led2off";char *ledoff3 = "led3off";uart4_config();all_led_init();while (1){gets(buf); // 读取字符串puts(buf); // 打印字符串//判断字符串,确定灯的亮与灭if((strcmp(buf,ledon1) == 0)) //一号灯亮{led1_on();}else if((strcmp(buf,ledoff1) == 0)) //一号灯灭{led1_off();}else if((strcmp(buf,ledon2) == 0)) //二号灯亮{led2_on();}else if((strcmp(buf,ledoff2) == 0)) //二号灯灭{led2_off();}else if((strcmp(buf,ledon3) == 0)) //三号灯亮{led3_on();}else if((strcmp(buf,ledoff3) == 0)) //三号灯灭{led3_off();} }
}
相关文章:
华清远见嵌入式学习——ARM——作业3
作业要求: 代码效果图: 代码: led.h #ifndef __LED_H__ #define __LED_H__#define RCC_GPIO (*(unsigned int *)0x50000a28) #define GPIOE_MODER (*(unsigned int *)0x50006000) #define GPIOF_MODER (*(unsigned int *)0x50007000) #defi…...

19.JavaSE
一、JavaSE。 (1)IO流。 1.字节字符流 2.标准流打印流对象流 (2)集合。 1.List/Set/Queue/Map集合 2.properties集合 (3)多线程。 1.线程创建的…...

仓库管理用什么软件
仓库管理是一个非常重要的话题,大到企业,小到个人,只要有货物的往来就会有仓库方面的管理,最为典型的就是货物的进出库存管理,这也是最为基础的仓库管理内容,那么仓库管理要用什么软件,从不同的…...

飞天使-k8s知识点8-kubernetes资源对象-编写中
文章目录 资源对象是k8s核心概念 资源对象是k8s核心概念 查看防火墙规则 32002 端口的去向 [rootkubeadm-master1 ~]# iptables -t nat -vnL |grep 32000 0 KUBE-MARK-MASQ tcp -- * * 0.0.0.0/0 0.0.0.0/0 /* kubernetes-dashboard/…...

Oracle Create user
sqlplus /nolog conn sys/pw123456orcl as sysdba CREATE USER zengwenfeng IDENTIFIED BY zengwenfeng ; GRANT ALL PRIVILEGES TO zengwenfeng ; COMMIT; C:\Users\Administrator>sqlplus /nologSQL*Plus: Release 11.2.0.1.0 Production on 星期日 12月 24 21:38:24 20…...

树莓派,mediapipe,Picamera2利用舵机云台追踪人手(PID控制)
一、项目目标 追踪人手大拇指指尖: 当人手移动时,摄像头通过控制两个伺服电机(分别是偏航和俯仰)把大拇指指尖放到视界的中心位置,本文采用了PID控制伺服电机 Mediapipe Hand简介 MediaPipe 手部标志任务可检测图像…...
DQL查询数据(超重点)以及distinct(去重)
DQL(Data Query Language:数据查询语言) 1.所有查询操作都用 SELECT 2.无论是简单的查询还是复杂的查询它都能做 3.数据库中最核心的语言,最重要的语句 4.使用频率最高的语句 语法: SELECT 字段1,字段2,……FROM 表 有时候…...

【网络奇缘】——奈氏准则和香农定理从理论到实践一站式服务|计算机网络
🌈个人主页: Aileen_0v0 🔥热门专栏: 华为鸿蒙系统学习|计算机网络|数据结构与算法 💫个人格言:"没有罗马,那就自己创造罗马~" 目录 失真 - 信号的变化 影响信号失真的因素: 编辑 失真的一种现象:码间…...

MongoDB 根据 _id 获取记录的创建时间并回填记录中
MongoDB 集合 test1,有字段 _id,createTime,createTimeStr,name字段 , 查询createTime不为空的,根据 _id 生成该条记录的创建时间时间戳并填写到字段 createTime 字段中 ,并打印时间戳 // 查询 createTime…...

【开源】基于JAVA语言的独居老人物资配送系统
目录 一、摘要1.1 项目介绍1.2 项目录屏 二、功能模块三、系统展示四、核心代码4.1 查询社区4.2 新增物资4.3 查询物资4.4 查询物资配送4.5 新增物资配送 五、免责说明 一、摘要 1.1 项目介绍 基于JAVAVueSpringBootMySQL的独居老人物资配送系统,包含了社区档案、…...
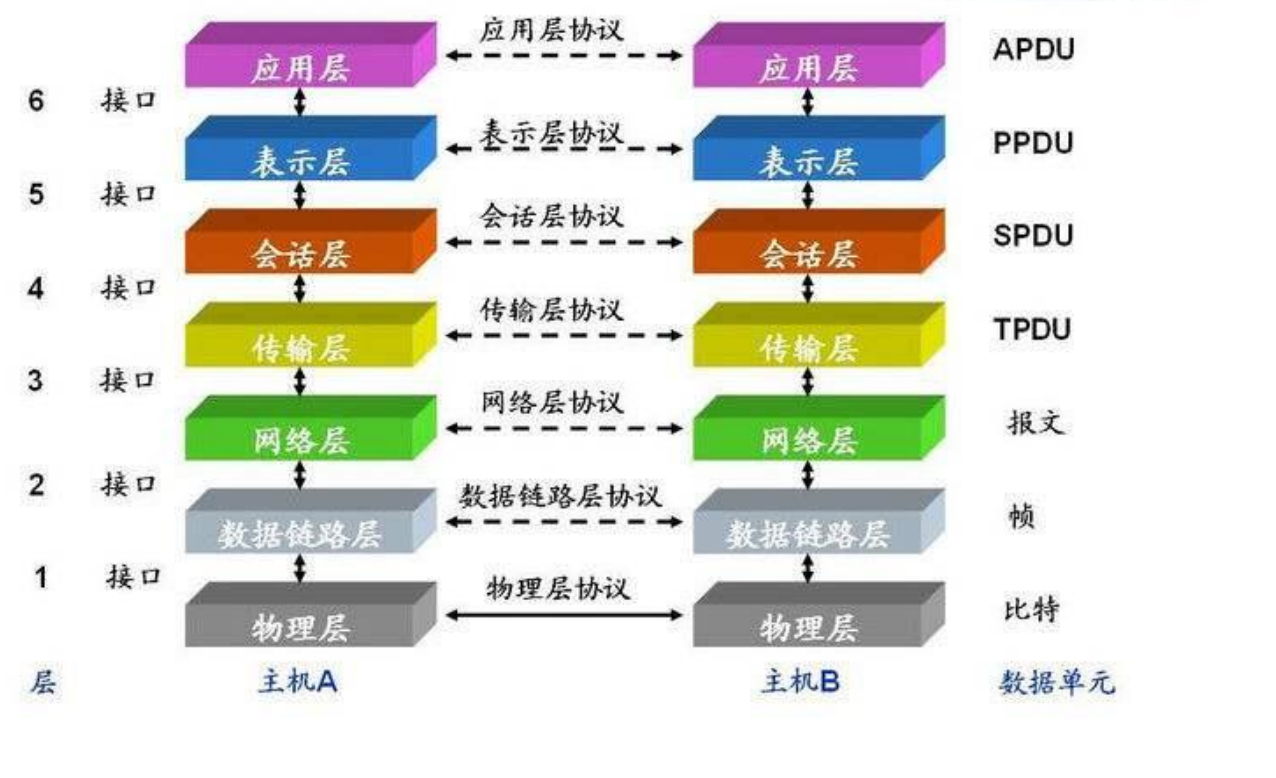
网络7层架构
网络 7 层架构 什么是OSI七层模型? OSI模型用于定义并理解数据从一台计算机转移到另一台计算机,在最基本的形式中,两台计算机通过网线和连接器相互连接,在网卡的帮助下共享数据,形成一个网络,但是一台计算…...
【Arthas】Arthas线上trace匿名函数/Lambda表达式/函数式接口
前言 Arthas是一个非常牛B的东西,我非常喜欢用,特别是在定位线上问题的时候,牛逼大发! 非常建议所有Java玩家都去学习一下 阅读对象 了解并使用过Arthas了解并使用过trace命令 先说结论 先说结论,lambda表达式的追…...

阿里云“块存储”是系统盘和数据盘的意思
阿里云“块存储”是什么意思?块存储是指阿里云服务器的系统盘或数据盘。块存储EBS(Elastic Block Storage)是为云服务器ECS提供的低时延、持久性、高可靠的块级随机存储。块存储支持在可用区内自动复制您的数据,防止意外硬件故障导…...

AI赋能金融创新:ChatGPT引领量化交易新时代
文章目录 一、引言二、ChatGPT与量化交易的融合三、实践应用:ChatGPT在量化交易中的成功案例四、挑战与前景五、结论《AI时代Python量化交易实战:ChatGPT让量化交易插上翅膀》📚→ [当当](http://product.dangdang.com/29658180.html) | [京东…...

数字化时代的探索:学生为何对数据可视化趋之若鹜?
随着信息时代的迅猛发展,数据已经成为我们生活中不可或缺的一部分。而在这个数字化浪潮中,越来越多的学生开始关注数据可视化,这并非偶然。下面,我就从可视化从业者的角度出发,简单聊聊为什么越来越多的学生开始关注数…...

vue2、vue3实现用aws s3协议操作minio进行文件存储和读取
亚马逊s3 API文档 最开始安装了aws-sdk/client-s3,但是不知道为什么一直报错,所以用了aws-sdk 准备工作: 需要已经搭建好minio、创建好桶 1. vue2 安装插件 yarn add aws-sdk s3配置 var AWS require("aws-sdk"); AWS.co…...

宏集应用 | 如何通过振动传感器防止造纸工业中的意外故障?
来源:宏集科技 工业物联网 宏集应用 | 如何通过振动传感器防止造纸工业中的意外故障? 原文链接:https://mp.weixin.qq.com/s/Z2qSdJnPLdOxJuG5qz-JJA 欢迎关注虹科,为您提供最新资讯! 一 应用背景 在造纸工业中&…...

【华为OD题库-110】反转每对括号间的子串-java
题目 给出一个字符串s(仅含有小写英文字母和括号)。 请你按照从括号内到外的顺序,逐层反转每对匹配括号中的字符串,并返回最终的结果。注意,您的结果中不应包含任何括号。 示例1: 输入: s “(abcd)” 输出: “dcba” 示例2: 输入: s “(u(l…...

如何搭建一个高效的Python开发环境
“工欲善其事,必先利其器”,这里我们来搭建一套高效的 Python 开发环境,为后续的数据分析做准备。 关于高效作业,对于需要编写 Python 代码进行数据分析的工作而言,主要涉及两个方面。 1. 一款具备强大的自动完成和错…...

Reactor 和 Proactor模式,IO复用与epoll、同步IO,异步IO与协程
汽车软件中的CPU密集与IO密集任务 在汽车软件中,涉及到ADAS的长期占用CPU的计算任务可以算的上是CPU密集型。 另外的,众多SOA原子服务或者各种数据收集、处理、分发、log系统,应该算是IO密集型任务。 寻求一些手段优化IO性能的原因 在过去…...

ARMv8 A64指令集SIMD与浮点运算优化指南
1. A64指令集SIMD与浮点运算架构解析在ARMv8架构中,A64指令集的SIMD(单指令多数据流)和浮点运算单元构成了高性能计算的核心引擎。这套指令集的设计体现了现代处理器架构中数据级并行(DLP)的精髓——通过单条指令同时处…...

LiteLoaderQQNT插件加载器:从简单加载到企业级插件生态的完整进化指南
LiteLoaderQQNT插件加载器:从简单加载到企业级插件生态的完整进化指南 【免费下载链接】LiteLoaderQQNT QQNT 插件加载器:LiteLoaderQQNT —— 轻量 简洁 开源 福瑞 项目地址: https://gitcode.com/gh_mirrors/li/LiteLoaderQQNT LiteLoaderQQ…...

计算机视觉工程师必须掌握的颜色空间选型指南
1. 项目概述:为什么计算机视觉工程师必须懂颜色理论你有没有遇到过这样的情况:模型在训练集上准确率98%,一到测试集就掉到72%?调试半天发现,不是数据标注错了,也不是网络结构有问题,而是训练图像…...

基于大语言模型的网页自动化智能体:Elsa OpenClaw 实战指南
1. 项目概述与核心价值 最近在折腾一些自动化流程,发现很多重复性的网页操作,比如数据抓取、表单填写、状态监控,手动来做不仅耗时,还容易出错。于是我开始寻找一个能真正理解网页结构、像人一样操作浏览器的工具。市面上有不少自…...
自适应计算与实战调优指南)
YOLOv5锚框(anchor)自适应计算与实战调优指南
1. 为什么需要自定义YOLOv5锚框参数 第一次用YOLOv5跑自己的数据集时,我发现模型死活训不出好效果。明明用的是官方预训练权重,标注数据也检查过没问题,但AP值就是上不去。后来把预测结果可视化出来才发现问题——那些长条形物体(…...

DeepSeek API Gateway与大模型推理服务深度协同:如何实现Token级流控、异步响应封装、Streaming SSE自动保活?
更多请点击: https://intelliparadigm.com 第一章:DeepSeek API Gateway架构全景与核心定位 DeepSeek API Gateway 是面向大模型服务的高性能、可扩展网关系统,承担请求路由、认证鉴权、流量控制、协议转换与可观测性聚合等关键职责。它并非…...

别再只把PCA当降维工具了!用它处理三维点云,5分钟搞定地面和墙面分割
别再只把PCA当降维工具了!用它处理三维点云,5分钟搞定地面和墙面分割 当我们在处理三维点云数据时,常常会遇到需要将地面、墙面和其他物体点进行分割的场景。传统方法可能需要复杂的算法和大量的计算资源,但今天我要分享的是一个…...

django-notifications故障排除:常见问题诊断与解决方案大全
django-notifications故障排除:常见问题诊断与解决方案大全 【免费下载链接】django-notifications GitHub notifications alike app for Django 项目地址: https://gitcode.com/gh_mirrors/dj/django-notifications django-notifications是一个为Django应用…...

如何用AI智能分层工具告别繁琐的PSD手动制作
如何用AI智能分层工具告别繁琐的PSD手动制作 【免费下载链接】layerdivider A tool to divide a single illustration into a layered structure. 项目地址: https://gitcode.com/gh_mirrors/la/layerdivider 还在为复杂的插画作品手动创建PSD分层文件而烦恼吗ÿ…...

基于ARP欺骗的中间人攻击的Python实现
摘要:本文在模拟网络攻击实验环境中,使用Python的scapy模块构造ARP数据包发送给目标机进行ARP欺骗,成功实施了中间人攻击,然后嗅探局域网内部网络流量,截取HTTP协议数据包进行解析,初步实现了在被攻击者浏览…...