STM32 基础知识(探索者开发板)--103讲 通用定时器
定时器相关实验通用步骤
通用定时器相关代码如下
//gtim.c#include "./BSP/TIMER/gtim.h"
#include "./BSP/LED/led.h"
#include "./SYSTEM/usart/usart.h"TIM_HandleTypeDef g_timx_handle; /* 定时器x句柄 *//*** @brief 通用定时器TIMX定时中断初始化函数* @note* 通用定时器的时钟来自APB1,当PPRE1 ≥ 2分频的时候* 通用定时器的时钟为APB1时钟的2倍, 而APB1为42M, 所以定时器时钟 = 84Mhz* 定时器溢出时间计算方法: Tout = ((arr + 1) * (psc + 1)) / Ft us.* Ft=定时器工作频率,单位:Mhz** @param arr: 自动重装值* @param psc: 预分频系数* @retval 无*/
void gtim_timx_int_init(uint16_t arr, uint16_t psc)
{GTIM_TIMX_INT_CLK_ENABLE(); /* 使能TIMx时钟 */g_timx_handle.Instance = GTIM_TIMX_INT; /* 通用定时器x */g_timx_handle.Init.Prescaler = psc; /* 预分频系数 */g_timx_handle.Init.CounterMode = TIM_COUNTERMODE_UP; /* 递增计数模式 */g_timx_handle.Init.Period = arr; /* 自动装载值 */HAL_TIM_Base_Init(&g_timx_handle);HAL_NVIC_SetPriority(GTIM_TIMX_INT_IRQn, 1, 3); /* 设置中断优先级,抢占优先级1,子优先级3 */HAL_NVIC_EnableIRQ(GTIM_TIMX_INT_IRQn); /* 开启ITMx中断 */HAL_TIM_Base_Start_IT(&g_timx_handle); /* 使能定时器x和定时器x更新中断 */
}/*** @brief 定时器中断服务函数* @param 无* @retval 无*/
void GTIM_TIMX_INT_IRQHandler(void)
{/* 以下代码没有使用定时器HAL库共用处理函数来处理,而是直接通过判断中断标志位的方式 */if(__HAL_TIM_GET_FLAG(&g_timx_handle, TIM_FLAG_UPDATE) != RESET){LED1_TOGGLE();__HAL_TIM_CLEAR_IT(&g_timx_handle, TIM_IT_UPDATE); /* 清除定时器溢出中断标志位 */}
}/*********************************以下是通用定时器PWM输出实验程序*************************/TIM_HandleTypeDef g_timx_pwm_chy_handle; /* 定时器x句柄 *//*** @brief 通用定时器TIMX 通道Y PWM输出 初始化函数(使用PWM模式1)* @note* 通用定时器的时钟来自APB1,当PPRE1 ≥ 2分频的时候* 通用定时器的时钟为APB1时钟的2倍, 而APB1为42M, 所以定时器时钟 = 84Mhz* 定时器溢出时间计算方法: Tout = ((arr + 1) * (psc + 1)) / Ft us.* Ft=定时器工作频率,单位:Mhz** @param arr: 自动重装值。* @param psc: 预分频系数* @retval 无*/
void gtim_timx_pwm_chy_init(uint16_t arr, uint16_t psc)
{TIM_OC_InitTypeDef timx_oc_pwm_chy = {0}; /* 定时器输出句柄 */g_timx_pwm_chy_handle.Instance = GTIM_TIMX_PWM; /* 定时器x */g_timx_pwm_chy_handle.Init.Prescaler = psc; /* 预分频系数 */g_timx_pwm_chy_handle.Init.CounterMode = TIM_COUNTERMODE_UP; /* 递增计数模式 */g_timx_pwm_chy_handle.Init.Period = arr; /* 自动重装载值 */HAL_TIM_PWM_Init(&g_timx_pwm_chy_handle); /* 初始化PWM */timx_oc_pwm_chy.OCMode = TIM_OCMODE_PWM1; /* 模式选择PWM1 */timx_oc_pwm_chy.Pulse = arr / 2; /* 设置比较值,此值用来确定占空比 */timx_oc_pwm_chy.OCPolarity = TIM_OCPOLARITY_LOW; /* 输出比较极性为低 */HAL_TIM_PWM_ConfigChannel(&g_timx_pwm_chy_handle, &timx_oc_pwm_chy, GTIM_TIMX_PWM_CHY); /* 配置TIMx通道y */HAL_TIM_PWM_Start(&g_timx_pwm_chy_handle, GTIM_TIMX_PWM_CHY); /* 开启对应PWM通道 */
}/*** @brief 定时器底层驱动,时钟使能,引脚配置* 此函数会被HAL_TIM_PWM_Init()调用* @param htim:定时器句柄* @retval 无*/
void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef *htim)
{if (htim->Instance == GTIM_TIMX_PWM){GPIO_InitTypeDef gpio_init_struct;GTIM_TIMX_PWM_CHY_GPIO_CLK_ENABLE(); /* 开启通道y的CPIO时钟 */GTIM_TIMX_PWM_CHY_CLK_ENABLE(); /* 使能定时器时钟 */gpio_init_struct.Pin = GTIM_TIMX_PWM_CHY_GPIO_PIN; /* 通道y的CPIO口 */gpio_init_struct.Mode = GPIO_MODE_AF_PP; /* 复用推完输出 */gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */gpio_init_struct.Alternate = GTIM_TIMX_PWM_CHY_GPIO_AF; /* IO口REMAP设置, 是否必要查看头文件配置的说明! */HAL_GPIO_Init(GTIM_TIMX_PWM_CHY_GPIO_PORT, &gpio_init_struct);}
}/*********************************以下是通用定时器输入捕获实验程序*************************/TIM_HandleTypeDef g_timx_cap_chy_handle; /* 定时器x句柄 *//*** @brief 通用定时器TIMX 通道Y 输入捕获 初始化函数* @note* 通用定时器的时钟来自APB1,当PPRE1 ≥ 2分频的时候* 通用定时器的时钟为APB1时钟的2倍, 而APB1为42M, 所以定时器时钟 = 84Mhz* 定时器溢出时间计算方法: Tout = ((arr + 1) * (psc + 1)) / Ft us.* Ft=定时器工作频率,单位:Mhz** @param arr: 自动重装值* @param psc: 预分频系数* @retval 无*/
void gtim_timx_cap_chy_init(uint32_t arr, uint16_t psc)
{TIM_IC_InitTypeDef timx_ic_cap_chy = {0};g_timx_cap_chy_handle.Instance = GTIM_TIMX_CAP; /* 定时器5 */g_timx_cap_chy_handle.Init.Prescaler = psc; /* 预分频系数 */g_timx_cap_chy_handle.Init.CounterMode = TIM_COUNTERMODE_UP; /* 向上计数模式 */g_timx_cap_chy_handle.Init.Period = arr; /* 自动重装载值 */HAL_TIM_IC_Init(&g_timx_cap_chy_handle); /* 初始化定时器 */timx_ic_cap_chy.ICPolarity = TIM_ICPOLARITY_RISING; /* 上升沿捕获 */timx_ic_cap_chy.ICSelection = TIM_ICSELECTION_DIRECTTI; /* 映射到TI1上 */timx_ic_cap_chy.ICPrescaler = TIM_ICPSC_DIV1; /* 配置输入分频,不分频 */timx_ic_cap_chy.ICFilter = 0; /* 配置输入滤波器,不滤波 */HAL_TIM_IC_ConfigChannel(&g_timx_cap_chy_handle, &timx_ic_cap_chy, GTIM_TIMX_CAP_CHY); /* 配置TIM5通道1 */__HAL_TIM_ENABLE_IT(&g_timx_cap_chy_handle, TIM_IT_UPDATE); /* 使能更新中断 */HAL_TIM_IC_Start_IT(&g_timx_cap_chy_handle, GTIM_TIMX_CAP_CHY); /* 开始捕获TIM5的通道1 */}/*** @brief 通用定时器输入捕获初始化接口* HAL库调用的接口,用于配置不同的输入捕获* @param htim:定时器句柄* @note 此函数会被HAL_TIM_IC_Init()调用* @retval 无*/
void HAL_TIM_IC_MspInit(TIM_HandleTypeDef *htim)
{if (htim->Instance == GTIM_TIMX_CAP) /* 输入通道捕获 */{GPIO_InitTypeDef gpio_init_struct;GTIM_TIMX_CAP_CHY_CLK_ENABLE(); /* 使能TIMx时钟 */GTIM_TIMX_CAP_CHY_GPIO_CLK_ENABLE(); /* 开启捕获IO的时钟 */gpio_init_struct.Pin = GTIM_TIMX_CAP_CHY_GPIO_PIN; /* 输入捕获的GPIO口 */gpio_init_struct.Mode = GPIO_MODE_AF_PP; /* 复用推挽输出 */gpio_init_struct.Pull = GPIO_PULLDOWN; /* 下拉 */gpio_init_struct.Speed = GPIO_SPEED_FREQ_VERY_HIGH; /* 高速 */gpio_init_struct.Alternate = GTIM_TIMX_CAP_CHY_GPIO_AF; /* 复用为捕获TIM5的通道1 */HAL_GPIO_Init(GTIM_TIMX_CAP_CHY_GPIO_PORT, &gpio_init_struct);HAL_NVIC_SetPriority(GTIM_TIMX_CAP_IRQn, 1, 3); /* 抢占1,子优先级3 */HAL_NVIC_EnableIRQ(GTIM_TIMX_CAP_IRQn); /* 开启ITMx中断 */}
}/* 输入捕获状态(g_timxchy_cap_sta)* [7] :0,没有成功的捕获;1,成功捕获到一次.* [6] :0,还没捕获到高电平;1,已经捕获到高电平了.* [5:0]:捕获高电平后溢出的次数,最多溢出63次,所以最长捕获值 = 63*65536 + 65535 = 4194303* 注意:为了通用,我们默认ARR和CCRy都是16位寄存器,对于32位的定时器(如:TIM5),也只按16位使用* 按1us的计数频率,最长溢出时间为:4194303 us, 约4.19秒** (说明一下:正常32位定时器来说,1us计数器加1,溢出时间:4294秒)*/
uint8_t g_timxchy_cap_sta = 0; /* 输入捕获状态 */
uint16_t g_timxchy_cap_val = 0; /* 输入捕获值 *//*** @brief 定时器中断服务函数* @param 无* @retval 无*/
void GTIM_TIMX_CAP_IRQHandler(void)
{HAL_TIM_IRQHandler(&g_timx_cap_chy_handle); /* 定时器共用处理函数 */
}/*** @brief 定时器输入捕获中断处理回调函数* @param htim:定时器句柄指针* @note 该函数在HAL_TIM_IRQHandler中会被调用* @retval 无*/
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{if (htim->Instance == GTIM_TIMX_CAP){if ((g_timxchy_cap_sta & 0X80) == 0) /* 还没成功捕获 */{if (g_timxchy_cap_sta & 0X40) /* 捕获到一个下降沿 */{g_timxchy_cap_sta |= 0X80; /* 标记成功捕获到一次高电平脉宽 */g_timxchy_cap_val = HAL_TIM_ReadCapturedValue(&g_timx_cap_chy_handle, GTIM_TIMX_CAP_CHY); /* 获取当前的捕获值 */TIM_RESET_CAPTUREPOLARITY(&g_timx_cap_chy_handle, GTIM_TIMX_CAP_CHY); /* 一定要先清除原来的设置 */TIM_SET_CAPTUREPOLARITY(&g_timx_cap_chy_handle, GTIM_TIMX_CAP_CHY, TIM_ICPOLARITY_RISING);/* 配置TIM5通道1上升沿捕获 */}else /* 还未开始,第一次捕获上升沿 */{g_timxchy_cap_sta = 0; /* 清空 */g_timxchy_cap_val = 0;g_timxchy_cap_sta |= 0X40; /* 标记捕获到了上升沿 */__HAL_TIM_DISABLE(&g_timx_cap_chy_handle); /* 关闭定时器5 */__HAL_TIM_SET_COUNTER(&g_timx_cap_chy_handle,0);/* 定时器5计数器清零 */TIM_RESET_CAPTUREPOLARITY(&g_timx_cap_chy_handle, GTIM_TIMX_CAP_CHY); /* 一定要先清除原来的设置!! */TIM_SET_CAPTUREPOLARITY(&g_timx_cap_chy_handle, GTIM_TIMX_CAP_CHY, TIM_ICPOLARITY_FALLING);/* 定时器5通道1设置为下降沿捕获 */__HAL_TIM_ENABLE(&g_timx_cap_chy_handle); /* 使能定时器5 */}}}
}/*** @brief 定时器更新中断回调函数* @param htim : 定时器句柄指针* @note 此函数会被定时器中断函数共同调用的* @retval 无*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{if (htim->Instance == GTIM_TIMX_CAP){if ((g_timxchy_cap_sta & 0x80) == 0) /* 还没成功捕获 */{if (g_timxchy_cap_sta & 0x40) /* 已经捕获到高电平了 */{if ((g_timxchy_cap_sta & 0x3F) == 0x3F) /* 高电平太长了 */{TIM_RESET_CAPTUREPOLARITY(&g_timx_cap_chy_handle, GTIM_TIMX_CAP_CHY); /* 一定要先清除原来的设置 */TIM_SET_CAPTUREPOLARITY(&g_timx_cap_chy_handle, GTIM_TIMX_CAP_CHY, TIM_ICPOLARITY_RISING);/* 配置TIM5通道1上升沿捕获 */g_timxchy_cap_sta |= 0x80; /* 标记成功捕获了一次 */g_timxchy_cap_val = 0xFFFF;}else /* 累计定时器溢出次数 */{g_timxchy_cap_sta++;}}}}
}/*********************************以下是通用定时器脉冲计数实验程序*************************/TIM_HandleTypeDef g_timx_cnt_chy_handle; /* 定时器x句柄 *//* 记录定时器计数器的溢出次数, 方便计算总脉冲个数 */
uint32_t g_timxchy_cnt_ofcnt = 0 ; /* 计数溢出次数 *//*** @brief 通用定时器TIMX 通道Y 脉冲计数 初始化函数* @note* 本函数选择通用定时器的时钟选择: 外部时钟源模式1(SMS[2:0] = 111)* 这样CNT的计数时钟源就来自 TIMX_CH1/CH2, 可以实现外部脉冲计数(脉冲接入CH1/CH2)** 时钟分频数 = psc, 一般设置为0, 表示每一个时钟都会计数一次, 以提高精度.* 通过读取CNT和溢出次数, 经过简单计算, 可以得到当前的计数值, 从而实现脉冲计数** @param arr: 自动重装值 * @retval 无*/
void gtim_timx_cnt_chy_init(uint16_t psc)
{GPIO_InitTypeDef gpio_init_struct;TIM_SlaveConfigTypeDef tim_slave_config = {0};GTIM_TIMX_CNT_CHY_CLK_ENABLE(); /* 使能TIMx时钟 */GTIM_TIMX_CNT_CHY_GPIO_CLK_ENABLE(); /* 开启GPIOA时钟 */g_timx_cnt_chy_handle.Instance = GTIM_TIMX_CNT; /* 定时器x */g_timx_cnt_chy_handle.Init.Prescaler = psc; /* 预分频系数 */g_timx_cnt_chy_handle.Init.CounterMode = TIM_COUNTERMODE_UP; /* 递增计数模式 */g_timx_cnt_chy_handle.Init.Period = 65535; /* 自动重装载值 */HAL_TIM_IC_Init(&g_timx_cnt_chy_handle);gpio_init_struct.Pin = GTIM_TIMX_CNT_CHY_GPIO_PIN; /* 输入捕获的GPIO口 */gpio_init_struct.Mode = GPIO_MODE_AF_PP; /* 复用推挽输出 */gpio_init_struct.Pull = GPIO_PULLDOWN; /* 下拉 */gpio_init_struct.Speed = GPIO_SPEED_FREQ_VERY_HIGH; /* 高速 */gpio_init_struct.Alternate = GTIM_TIMX_CNT_CHY_GPIO_AF; /* 复用为捕获TIMx的通道 */HAL_GPIO_Init(GTIM_TIMX_CNT_CHY_GPIO_PORT, &gpio_init_struct);/* 从模式:外部触发模式1 */tim_slave_config.SlaveMode = TIM_SLAVEMODE_EXTERNAL1; /* 从模式:外部触发模式1 */tim_slave_config.InputTrigger = TIM_TS_TI1FP1; /* 输入触发:选择 TI1FP1(TIMX_CH1) 作为输入源 */tim_slave_config.TriggerPolarity = TIM_TRIGGERPOLARITY_RISING; /* 触发极性:上升沿 */tim_slave_config.TriggerPrescaler = TIM_TRIGGERPRESCALER_DIV1; /* 触发预分频:无 */tim_slave_config.TriggerFilter = 0x0; /* 滤波:本例中不需要任何滤波 */HAL_TIM_SlaveConfigSynchronization(&g_timx_cnt_chy_handle, &tim_slave_config);HAL_NVIC_SetPriority(GTIM_TIMX_CNT_IRQn, 1, 3); /* 设置中断优先级,抢占优先级1,子优先级3 */HAL_NVIC_EnableIRQ(GTIM_TIMX_CNT_IRQn); /* 开启ITMx中断 */__HAL_TIM_ENABLE_IT(&g_timx_cnt_chy_handle, TIM_IT_UPDATE); /* 使能更新中断 */HAL_TIM_IC_Start(&g_timx_cnt_chy_handle, GTIM_TIMX_CNT_CHY); /* 开始捕获TIMx的通道y */
}/*** @brief 通用定时器TIMX 通道Y 获取当前计数值 * @param 无* @retval 当前计数值*/
uint32_t gtim_timx_cnt_chy_get_count(void)
{uint32_t count = 0;count = g_timxchy_cnt_ofcnt * 65536; /* 计算溢出次数对应的计数值 */count += __HAL_TIM_GET_COUNTER(&g_timx_cnt_chy_handle); /* 加上当前CNT的值 */
// printf("gtim_timx count %d \r\n", count);return count;
}/*** @brief 通用定时器TIMX 通道Y 重启计数器* @param 无* @retval 当前计数值*/
void gtim_timx_cnt_chy_restart(void)
{__HAL_TIM_DISABLE(&g_timx_cnt_chy_handle); /* 关闭定时器TIMX */g_timxchy_cnt_ofcnt = 0; /* 累加器清零 */__HAL_TIM_SET_COUNTER(&g_timx_cnt_chy_handle, 0); /* 计数器清零 */__HAL_TIM_ENABLE(&g_timx_cnt_chy_handle); /* 使能定时器TIMX */
}/*** @brief 通用定时器TIMX 脉冲计数 更新中断服务函数* @param 无* @retval 无*/
void GTIM_TIMX_CNT_IRQHandler(void)
{/* 以下代码没有使用定时器HAL库共用处理函数来处理,而是直接通过判断中断标志位的方式 */if(__HAL_TIM_GET_FLAG(&g_timx_cnt_chy_handle, TIM_FLAG_UPDATE) != RESET){g_timxchy_cnt_ofcnt++; /* 累计溢出次数 */}__HAL_TIM_CLEAR_IT(&g_timx_cnt_chy_handle, TIM_IT_UPDATE);
}main.c
//通用定时器脉冲计数实验#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/usart/usart.h"
#include "./SYSTEM/delay/delay.h"
#include "./BSP/LED/led.h"
#include "./BSP/KEY/key.h"
#include "./BSP/TIMER/gtim.h"int main(void)
{uint32_t curcnt = 0;uint32_t oldcnt = 0;uint8_t key = 0;uint8_t t = 0;HAL_Init(); /* 初始化HAL库 */sys_stm32_clock_init(336, 8, 2, 7); /* 设置时钟,168Mhz */delay_init(168); /* 延时初始化 */usart_init(115200); /* 串口初始化为115200 */led_init(); /* 初始化LED */key_init(); /* 初始化按键 */gtim_timx_cnt_chy_init(0); /* 定时器计数初始化, 不分频 */gtim_timx_cnt_chy_restart(); /* 重启计数 */while (1){key = key_scan(0); /* 扫描按键 */if (key == KEY0_PRES) /* KEY0按键按下,重启计数 */{printf("key0 press \r\n");gtim_timx_cnt_chy_restart(); /* 重新启动计数 */}curcnt = gtim_timx_cnt_chy_get_count(); /* 获取计数值 */if (oldcnt != curcnt){oldcnt = curcnt;printf("CNT:%d\r\n", oldcnt); /* 打印脉冲个数 */}t++;if (t > 40) /* 200ms进入一次 */{t = 0;LED0_TOGGLE(); /* LED0闪烁, 提示程序运行 */}delay_ms(10);}
}
相关文章:
--103讲 通用定时器)
STM32 基础知识(探索者开发板)--103讲 通用定时器
定时器溢出时间计算方法: Tout ((arr 1) * (psc 1)) / Ft us arr:自动重装载值 psc:时钟预分频数 定时器相关实验通用步骤 1.定时器初始化 a.定义结构体句柄 b.设基地址 c.设分频系数 d.设自动重装载值 e. 设计数模式 f.初始化定时器 2.外设模式配置 a.设置模式 d.映…...

mysqld_exporter使用
下载自己解压好 https://github.com/prometheus/mysqld_exporter/releases/download/v0.15.1/mysqld_exporter-0.15.1.linux-amd64.tar.gz在需要监控的数据库上执行 CREATE USER monit_test* IDENTIFIED BY Sfn4ZCHsK WITH MAX_USER_CONNECTIONS 3; GRANT PROCESS, REPLICATI…...

Java 解决远程调用 ssl 证书认证问题
Java 解决远程调用 ssl 证书认证问题 方法 1方法 2方法 3 方法 1 在 jdk 目录导入证书。 首先要下载 服务器 ssl 证书,下载完成之后。把它命名成 Root.cer 后面使用 cmd 命令行 在 jdk 目录导入。 例如 : jdk 的目录为:D:\JetBranins\Intel…...
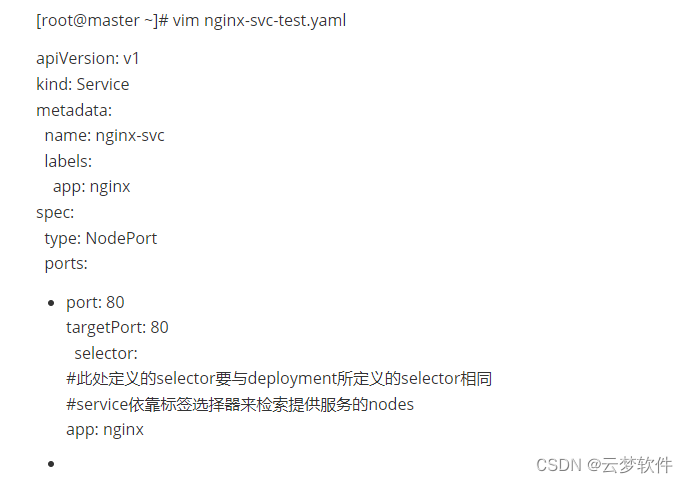
kubernetes(k8s) Yaml 文件详解
YAML格式:用于配置和管理,YAML是一种简洁的非标记性语言,内容格式人性化,较易读。 1、查看API 资源版本标签 kubectl api-versions 2、编写资源配置清单 kubectl create -f nginx-test.yaml --validatefalse 2.3 查看创建的po…...

手拉手后端Springboot整合JWT
环境介绍 技术栈 springbootmybatis-plusmysqljava-jwt 软件 版本 mysql 8 IDEA IntelliJ IDEA 2022.2.1 JDK 1.8 Spring Boot 2.7.13 mybatis-plus 3.5.3.2 Json Web令牌简称JWT Token是在服务端产生的一串字符串是客户端访问资源接口(AP)时所需要的资源凭证。…...

小狐狸GPT付费2.4.9 去除授权弹窗版
后台安装步骤: 1、在宝塔新建个站点,php版本使用7.2 、 7.3 或 7.4,把压缩包上传到站点根目录,运行目录设置为/public 2、导入数据库文件,数据库文件是 /db.sql 3、修改数据库连接配置,配置文件是/.env 4、…...

Scrapy爬虫中合理使用time.sleep和Request
概述 在Scrapy爬虫中,我们需要深入分析time.sleep和Request对象对并发请求的影响。time.sleep函数用于在发起请求之前等待一段时间,而Request对象用于发送HTTP请求。我们必须仔细考虑这些操作对其他并发请求的潜在影响,以及在异步情况下可能…...
在Spring Cloud中使用Ribbon完成一个简单的负载均衡demo
Spring Cloud系列断更了有一段时间了,这段时间最近都在忙着项目上的事,天天修复bug以及调整需求,反正各种操劳,了解业务需求,然后开发相关功能,很久都没碰Spring Cloud系列的相关文章了,最近回头…...

mysql-5.6.16的内存泄漏问题
一、背景 有一台物理机上一个版本为5.6.16的从库出现了内存的增高,观测其日志可以发现,这台数据库已经oom很多次了,并且stop slave的时候会卡住非常长的时间才能停止 二、根本原因 上述的现象可以看到是一个明显的内存泄漏现象,…...
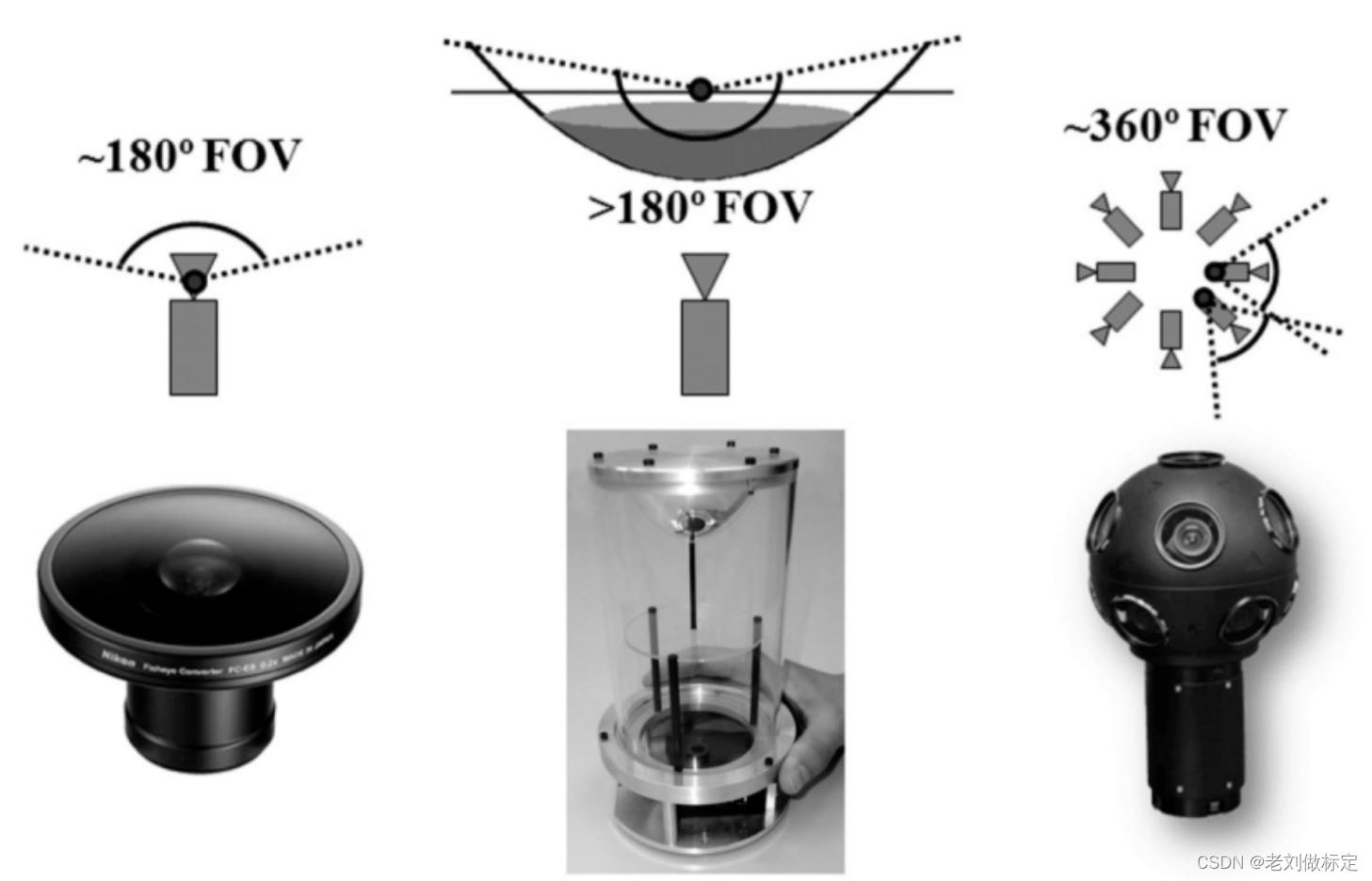
相机内参标定理论篇------相机模型选择
相机种类: 当拿到一款需要标定内参的相机时,第一个问题就是选择那种的相机模型。工程上相机类型的划分并不是十分严格,一般来说根据相机FOV可以把相机大概分为以下几类: 长焦相机:< 标准相机:~&…...
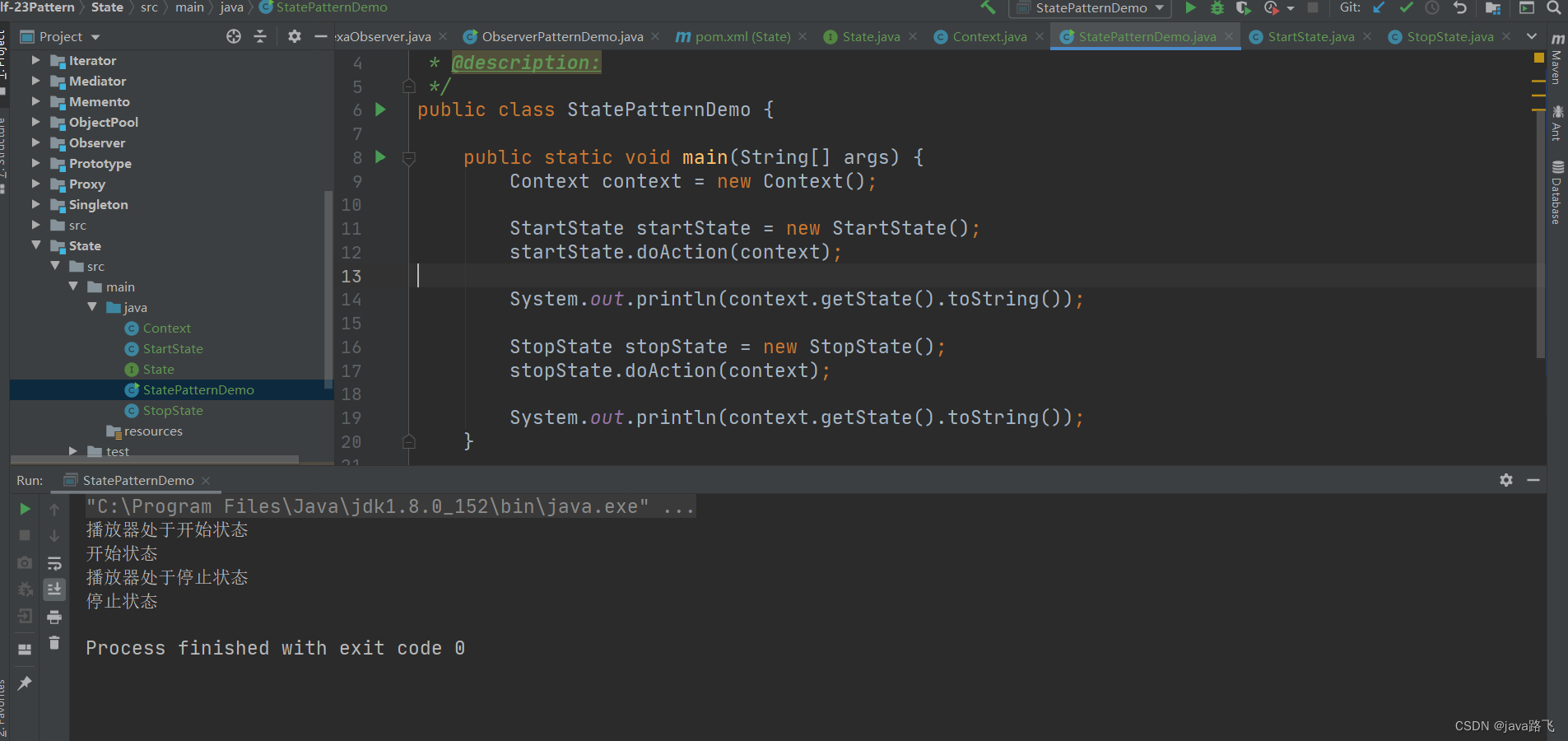
java设计模式学习之【状态模式】
文章目录 引言状态模式简介定义与用途实现方式 使用场景优势与劣势在Spring框架中的应用状态示例代码地址 引言 设想你正在使用一个在线视频播放器观看电影。随着你的互动,播放器可能处于不同的状态:播放、暂停、缓冲或结束。每个状态下,播放…...

使用aspose.Words更新表格列宽
public static bool UpdateTableStyle(string filePath) { try { Document doc new Document(); //样式 Style style doc.Styles.Add(StyleType.Paragraph, "cellStyle"); style.Font.Name "simsun"; PageSetup pageSet doc.Sections[0].PageSetup; pa…...
pycharm 工具栏不见了
新版pycharm后, 菜单栏和工具栏不见了 目录 我发现的解决方法: 其他旧版的解决方法: 我发现的解决方法: 其他旧版的解决方法: 另外,一些使用pycharm的新手可能会由于不熟悉软件的功能而误操作ÿ…...
图灵日记之java奇妙历险记--类和对象
目录 类的定义和使用类的定义格式 类的实例化类和对象的说明 this引用this引用的特性 对象的构造及初始化就地初始化构造方法 封装包导入包中的类自定义包 static成员static修饰成员变量static修饰成员方法 代码块代码块概念及分类构造代码块静态代码块 匿名对象 类的定义和使用…...

Kotlin 枚举类
使用 enum 修饰符;每个枚举常量都是一个对象,枚举常量以逗号分隔 // 枚举类 enum class Direction {NORTH, SOUTH, WEST, EAST }// 每一个枚举都是枚举类的实例,所以可以这样初始化 enum class Color(val rgb: Int) {RED(0xFF0000),GREEN(0x…...

可运营的Leadshop开源商城小程序源码 +H5公众号+带视频教程
源码简介 Leadshop是一款出色的开源电商系统,具备轻量级、高性能的特点,并提供持续更新和迭代服务。该系统采用前后端分离架构(uniappyii2.0),以实现最佳用户体验为目标。 前端部分采用了uni-app、ES6、Vue、Vuex、V…...

Qt底层机制之对象树总结
Qt对象树是Qt框架中的一个重要概念,它用于管理对象之间的关系和生命周期。除了常规的对象树结构,Qt还提供了一些特殊的用法来扩展对象树的功能和灵活性。 1. 父子关系:Qt对象树通过设置父对象来建立父子关系。父对象负责管理子对象的内存分配和释放。这种关系可以通过`setP…...

QT C++ TCP Socket 请求心知天气
0.0 相关连接代码部分头文件具体实现 相关连接 心知天气官方天气图标 心知天气官网 代码部分 头文件 #include <QtNetwork> #include <QNetworkAccessManager> #include <QDebug> #include <QJsonValue> #include <QJsonArray> #include &l…...

双向链表的实现及头尾插入删除
双链表的增删查改 一.双向链表的初始化二.创建返回链表的头结点三.双向链表销毁四. 双向链表打印五.双向链表尾插六. 双向链表尾删七. 双向链表头插八.双向链表头删九.双向链表的查找十.双向链表在pos的前面进行插入十一. 双向链表删除pos位置的节点 一.双向链表的初始化 Lis…...
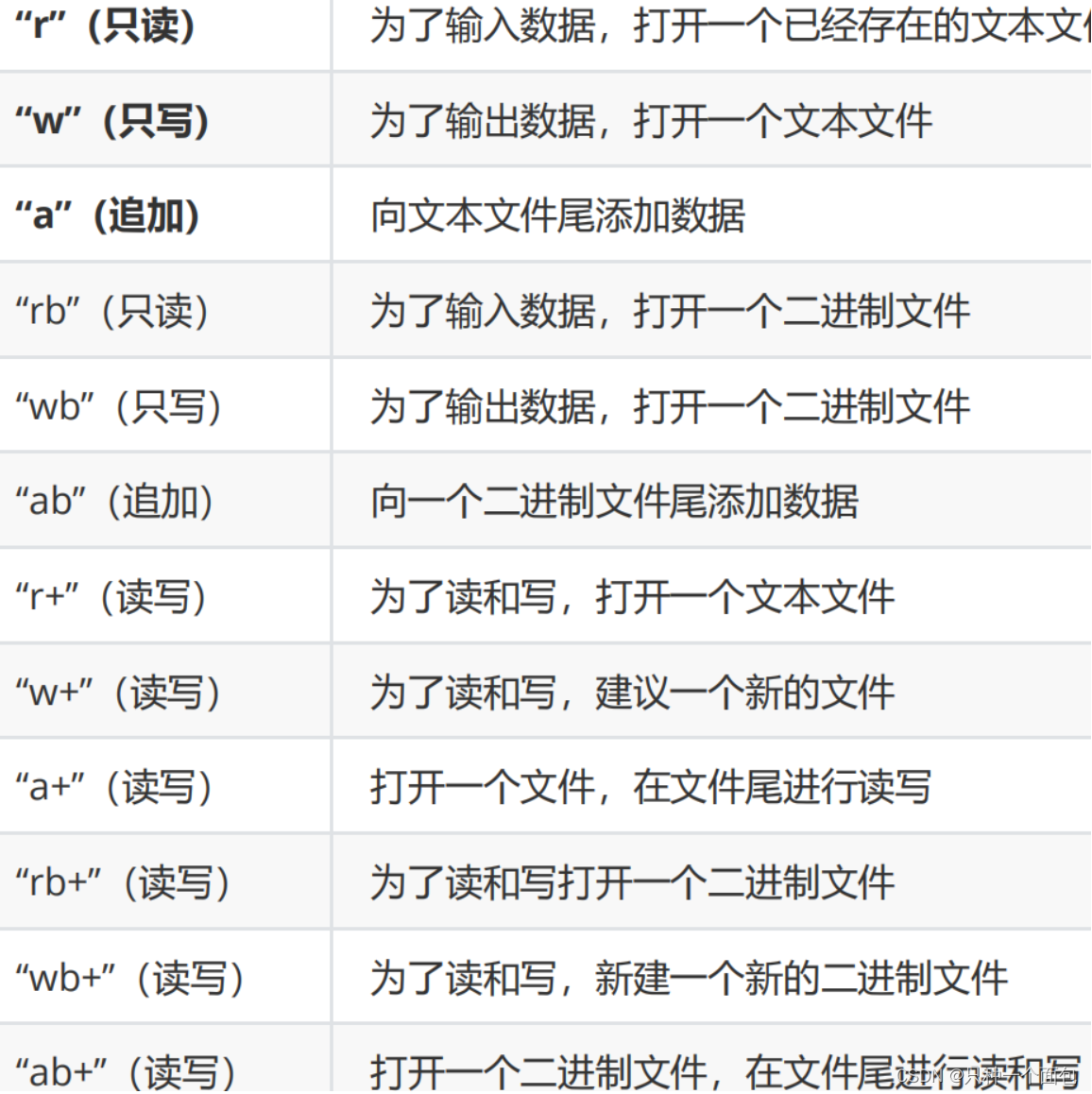
C语言—每日选择题—Day62
第一题 1. 在使用标准C库时,下面哪个选项使用只读模式打开文件? A:fopen("foo.txt", "r") B:fopen("foo.txt", "r") C:fopen("foo.txt", "w") D…...

RV1126B嵌入式音频开发实战:从ALSA驱动到应用播放全解析
1. 项目概述:从一块核心板到声音的诞生 最近在折腾一块基于瑞芯微RV1126B芯片的EASY EAI Nano开发板,目标是让它“开口说话”——实现稳定的音频输出。这听起来像是一个基础功能,但对于嵌入式开发,尤其是涉及多媒体处理的边缘AI设…...

别再混着用了!详解Nginx 1.25.1中独立的http2指令与listen指令的拆分逻辑
Nginx配置演进:从listen指令到独立http2指令的技术深析 当你在Nginx 1.25.1的日志中发现the "listen ... http2" directive is deprecated警告时,这不仅仅是一个简单的语法变更通知。它标志着Nginx在协议支持架构上的一次重要演进,…...

基于MCP3421高精度ADC的电池电量监测方案设计与实践
1. 项目概述:为什么需要一个专用的电量监测板?在嵌入式开发和物联网设备中,电池供电是常态。无论是手持仪表、无线传感器节点还是便携式医疗设备,准确掌握电池的剩余电量,就像司机需要时刻关注油表一样,是确…...

告别终端!为OpenWrt打造Web版脚本管家:Luci插件开发实战与全功能解析
1. 为什么我们需要Web版脚本管家? 每次在OpenWrt上折腾脚本都要打开终端,这对新手来说简直是噩梦。记得我第一次给路由器写脚本时,光是学会用vi编辑器就花了半小时,保存退出时还差点把系统搞崩。后来发现用WinSCP上传脚本还要改权…...

LabVIEW多核并行编程实战:从数据流原理到生产者-消费者架构优化
1. 项目概述:从单核到多核的性能跃迁如果你用LabVIEW做过一些稍微复杂的应用,比如高速数据采集、实时图像处理或者复杂的控制算法仿真,大概率会遇到一个瓶颈:程序跑起来感觉“卡”,CPU占用率明明不高,但循环…...

app评论区升级成功
经过我10个小时的激情工作,评论区终于是可以运行起来了,而且我升级了系统,让代码更加直观和可维护。什么你说不好看,等会就好看了。...

2026 论文双检突围:9 款查重降重降 AIGC 工具硬核横评,Paperxie 领跑全场景通关
paperxie-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPThttps://www.paperxie.cn/weight?type1https://www.paperxie.cn/weight?type1 毕业季论文查重飘红、AIGC 率爆表,已成为无数本科生与研究生的 “双重噩梦”。2026 年知网、维普全面升级…...
全流程实操:从ONNX转换到INT8/FP16量化加速)
YOLOv8在Jetson上导出TensorRT引擎(.engine)全流程实操:从ONNX转换到INT8/FP16量化加速
YOLOv8在Jetson平台上的TensorRT引擎部署与量化加速实战指南 当目标检测模型需要部署到边缘计算设备时,性能优化往往成为最关键的技术挑战。本文将深入探讨如何将YOLOv8模型高效转换为Jetson平台专用的TensorRT引擎,并通过INT8/FP16量化技术实现推理速度…...
)
protobufjs 编译命令选错就报错?一文搞懂 pbjs 的 -w 参数(es6 vs commonjs 实战解析)
ProtobufJS编译模块类型选型指南:ES6与CommonJS的深度对比与实战避坑 最近在Vite项目中集成Protobuf时,编译后的模块导入总是抛出The requested module does not provide an export named错误。这个问题困扰了我整整两天,最终发现根源在于pbj…...

告别手动Coding:用EB tresos Studio配置TC3xx芯片MCAL的保姆级图文指南
告别手动Coding:用EB tresos Studio配置TC3xx芯片MCAL的保姆级图文指南 当TC3xx系列芯片遇上AUTOSAR架构,传统寄存器级开发方式正在被图形化配置彻底革新。对于每天需要面对微控制器底层驱动的嵌入式工程师而言,EB tresos Studio提供的可视化…...