ROS无人机初始化GPS定位漂移误差,确保无人机稳定飞行
引言: 由于GPS在室外漂移的误差比较大,在长时间静止后启动,程序发布的位置可能已经和预期的位置相差较大,导致无法完成任务,尤其是气压计的数据不准,可能会导致无人机不能起飞或者一飞冲天。本文主要是在进行程序控制的时候,首先拿到最新的漂移误差,在此基础上进行程序控制,可以保证程序的稳定运行。
步骤一:创建订阅者订阅无人机的里程计信息
//创建一个Subscriber订阅者,订阅名为/mavros/local_position/odom的topic,注册回调函数local_pos_cb
ros::Subscriber local_pos_sub = nh.subscribe<nav_msgs::Odometry>("/mavros/local_position/odom", 10, local_pos_cb);
步骤二:创建相关变量,获取无人机的实时位置信息
这里定义了较多的变量,最重要的是位置和标志为,其余的可以自行设置
//定义变量,用于接收无人机的里程计信息
tf::Quaternion quat;
double roll, pitch, yaw;
float init_position_x_take_off =0;
float init_position_y_take_off =0;
float init_position_z_take_off =0;
bool flag_init_position = false;
nav_msgs::Odometry local_pos;
步骤三:定义回调函数,在回调函数中获取漂移值
//回调函数接收无人机的里程计信息
void local_pos_cb(const nav_msgs::Odometry::ConstPtr& msg)
{local_pos = *msg;if (flag_init_position==false && (local_pos.pose.pose.position.z!=0)){init_position_x_take_off = local_pos.pose.pose.position.x;init_position_y_take_off = local_pos.pose.pose.position.y;init_position_z_take_off = local_pos.pose.pose.position.z;flag_init_position = true; }tf::quaternionMsgToTF(local_pos.pose.pose.orientation, quat); tf::Matrix3x3(quat).getRPY(roll, pitch, yaw);
}
注:启动这个控制节点后,或订阅最新的初始位置,并且通过标志为控制只订阅一次,这个值就是最新的漂移值
步骤四:发布目标点,一定要把获取到的初始漂移值加上,如下:
//发布期望位置信息
pose.pose.position.x =init_position_x_take_off + 0;
pose.pose.position.y =init_position_y_take_off + 0;
pose.pose.position.z =init_position_z_take_off + ALTITUDE;
local_pos_pub.publish(pose);
这里ALTITUDE是我宏定义的0.5,表明无人机飞0.5米高度即可。室外使用的话,最好高度设置大于1米
步骤五:整体代码如下:
//包含ROS和MAVROS相关头文件
#include <string>
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h>
#include <mavros_msgs/CommandBool.h>
#include <mavros_msgs/SetMode.h>
#include <mavros_msgs/State.h>
#include <move_base_msgs/MoveBaseAction.h>
#include <actionlib/client/simple_action_client.h>
#include <std_msgs/Bool.h>
#include <geometry_msgs/TwistStamped.h>
#include <mavros_msgs/PositionTarget.h>
#include <cmath>
#include <tf/transform_listener.h>
#include <nav_msgs/Odometry.h>
#include <mavros_msgs/CommandLong.h>
#include <string>
#include <geometry_msgs/Twist.h>#define ALTITUDE 0.5//定义变量,用于接收无人机的状态信息
mavros_msgs::State current_state;
void state_cb(const mavros_msgs::State::ConstPtr& msg);//定义变量,用于接收无人机的里程计信息
tf::Quaternion quat;
double roll, pitch, yaw;
float init_position_x_take_off =0;
float init_position_y_take_off =0;
float init_position_z_take_off =0;
bool flag_init_position = false;
nav_msgs::Odometry local_pos;
void local_pos_cb(const nav_msgs::Odometry::ConstPtr& msg);//回调函数接收无人机的状态信息
void state_cb(const mavros_msgs::State::ConstPtr& msg)
{current_state = *msg;
}//回调函数接收无人机的里程计信息
void local_pos_cb(const nav_msgs::Odometry::ConstPtr& msg)
{local_pos = *msg;if (flag_init_position==false && (local_pos.pose.pose.position.z!=0)){init_position_x_take_off = local_pos.pose.pose.position.x;init_position_y_take_off = local_pos.pose.pose.position.y;init_position_z_take_off = local_pos.pose.pose.position.z;flag_init_position = true; }tf::quaternionMsgToTF(local_pos.pose.pose.orientation, quat); tf::Matrix3x3(quat).getRPY(roll, pitch, yaw);
}
int main(int argc, char **argv)
{//防止中文乱码setlocale(LC_ALL, "");//ROS节点初始化,节点名为offboard_single_positionros::init(argc, argv, "offboard_single_position");//创建节点句柄ros::NodeHandle nh;ros::Publisher local_pos_pub = nh.advertise<geometry_msgs::PoseStamped>("mavros/setpoint_position/local", 10);//创建一个Subscriber订阅者,订阅名为/mavros/state的topic,注册回调函数state_cbros::Subscriber state_sub = nh.subscribe<mavros_msgs::State>("mavros/state", 10, state_cb);//创建一个Subscriber订阅者,订阅名为/mavros/local_position/odom的topic,注册回调函数local_pos_cbros::Subscriber local_pos_sub = nh.subscribe<nav_msgs::Odometry>("/mavros/local_position/odom", 10, local_pos_cb);//创建一个服务客户端,连接名为/mavros/cmd/arming的服务,用于请求无人机解锁ros::ServiceClient arming_client = nh.serviceClient<mavros_msgs::CommandBool>("mavros/cmd/arming");//创建一个服务客户端,连接名为/mavros/set_mode的服务,用于请求无人机进入offboard模式ros::ServiceClient set_mode_client = nh.serviceClient<mavros_msgs::SetMode>("mavros/set_mode");//设置话题发布频率,需要大于2Hz,飞控连接有500ms的心跳包ros::Rate rate(20.0);//等待连接到飞控while(ros::ok() && !current_state.connected){ros::spinOnce();rate.sleep();}//设置无人机的期望位置geometry_msgs::PoseStamped pose;pose.pose.position.x =init_position_x_take_off + 0;pose.pose.position.y =init_position_y_take_off + 0;pose.pose.position.z =init_position_z_take_off + ALTITUDE;//send a few setpoints before startingfor(int i = 100; ros::ok() && i > 0; --i){local_pos_pub.publish(pose);ros::spinOnce();rate.sleep();}//定义客户端变量,设置为offboard模式mavros_msgs::SetMode offb_set_mode;offb_set_mode.request.custom_mode = "OFFBOARD";//定义客户端变量,请求无人机解锁mavros_msgs::CommandBool arm_cmd;arm_cmd.request.value = true;//记录当前时间,并赋值给变量last_requestros::Time last_request = ros::Time::now();while(ros::ok()){//请求进入OFFBOARD模式if( current_state.mode != "OFFBOARD" && (ros::Time::now() - last_request > ros::Duration(5.0))){if( set_mode_client.call(offb_set_mode) && offb_set_mode.response.mode_sent){ROS_INFO("Offboard enabled");}last_request = ros::Time::now();}else {//请求解锁if( !current_state.armed && (ros::Time::now() - last_request > ros::Duration(5.0))){if( arming_client.call(arm_cmd) && arm_cmd.response.success){ROS_INFO("Vehicle armed");}last_request = ros::Time::now();}}if(fabs(local_pos.pose.pose.position.z- init_position_z_take_off -ALTITUDE)<0.2){ if(ros::Time::now() - last_request > ros::Duration(3.0)){break;}}//发布期望位置信息pose.pose.position.x =init_position_x_take_off + 0;pose.pose.position.y =init_position_y_take_off + 0;pose.pose.position.z =init_position_z_take_off + ALTITUDE;local_pos_pub.publish(pose);ros::spinOnce();rate.sleep();} while(ros::ok()){pose.pose.position.x =init_position_x_take_off + 0;pose.pose.position.y =init_position_y_take_off + 0;pose.pose.position.z =init_position_z_take_off + ALTITUDE; local_pos_pub.publish(pose);ros::spinOnce();rate.sleep();}return 0;
}相关文章:

ROS无人机初始化GPS定位漂移误差,确保无人机稳定飞行
引言: 由于GPS在室外漂移的误差比较大,在长时间静止后启动,程序发布的位置可能已经和预期的位置相差较大,导致无法完成任务,尤其是气压计的数据不准,可能会导致无人机不能起飞或者一飞冲天。本文主要是在进…...
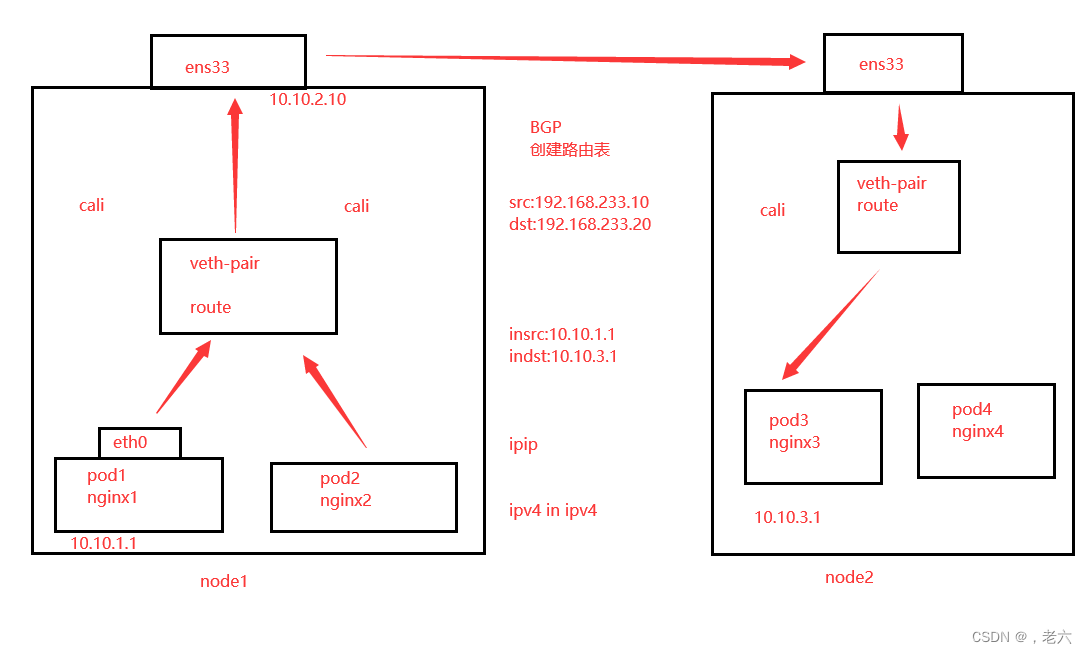
k8s网络类型
k8s中的通信模式: pod内部之间容器与容器之间的通信。 在同一个pod中的容器共享资源和网络,使用同一个网络命名空间。可以直接通信的。 同一个node节点之内,不同pod之间的通信。 每一个pod都有一个全局的真实的IP地址,同一个n…...
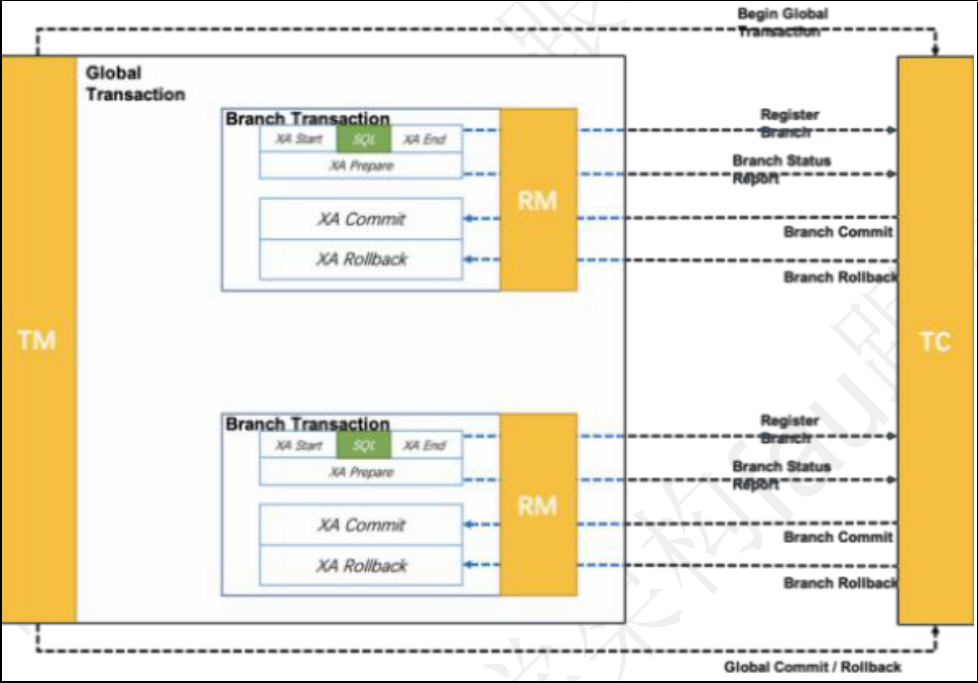
Seata 中封装了四种分布式事务模式,分别是: AT 模式, TCC 模式, Saga 模式, XA 模式,
文章目录 seata概述Seata 中封装了四种分布式事务模式,分别是:AT 模式,TCC 模式,Saga 模式,XA 模式, 今天我们来聊聊seata seata 概述 在微服务架构下,由于数据库和应用服务的拆分,…...

为什么设计制造行业需要数据加密?
设计制造行业是一个涉及多种技术、工艺、材料和产品的广泛领域,它对经济和社会的发展有着重要的影响。然而,随着数字化、智能化和网络化的发展,设计制造行业也面临着越来越多的数据安全风险,如数据泄露、数据篡改、数据窃取等。这…...

查看ios app运行日志
摘要 本文介绍了一款名为克魔助手的iOS应用日志查看工具,该工具可以方便地查看iPhone设备上应用和系统运行时的实时日志和奔溃日志。同时还提供了奔溃日志分析查看模块,可以对苹果奔溃日志进行符号化、格式化和分析,极大地简化了开发者的调试…...

怎么卸载macOS上的爱思助手如何卸载macOS上的logitech g hub,如何卸载顽固macOS应用
1.在App Store里下载Cleaner One Pro (注意,不需要订阅付费!!!白嫖基础功能就完全够了!!!) 2.运行软件,在左侧目录中选择“应用程序管理”,然后点…...
侦探IP“去推理化”:《名侦探柯南》剧场版走过26年
2023年贺岁档,柯南剧场版的第26部《黑铁的鱼影》如期上映。 这部在日本狂卷票房128亿日元的作品,被誉为有史以来柯南剧场版在商业成绩上最好的一部。 但该作在4月份日本还未上映前,就于国内陷入了巨大的争议。 试映内容里,灰原…...

图论 经典例题
1 拓扑排序 对有向图的节点排序,使得对于每一条有向边 U-->V U都出现在V之前 *有环无法拓扑排序 indegree[], nxs[];//前者表示节点 i 的入度,后者表示节点 i 指向的节点 queue [] for i in range(n):if indege[i] 0: queue.add(i)// 入度为0的节…...
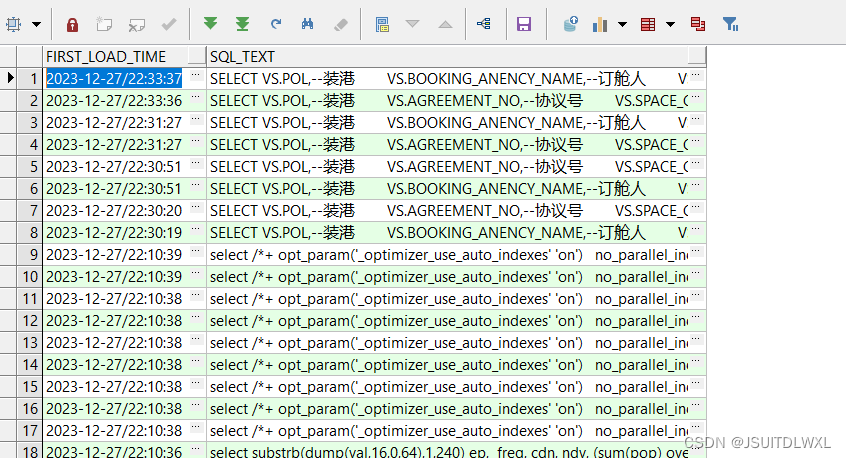
Oracle数据updater如何回滚
1.查询update语句执行的时间节点 ; select t.FIRST_LOAD_TIME, t.SQL_TEXT from v$sqlarea t where to_char(t.FIRST_LOAD_TIME) > 2023-03-19/17:00:00 order by t.FIRST_LOAD_TIME desc;开启表的行迁移 alter table test enable row movement;3.回滚表数据到…...

redis开启密码验证
开启密码验证 (1)配置文件中设置 redis.conf文件里面配置requirepass参数,redis认证密码:foobared,然后重启redis服务 ./redis-cli 127.0.0.1:6379> 127.0.0.1:6379> 127.0.0.1:6379> CONFIG SET requi…...
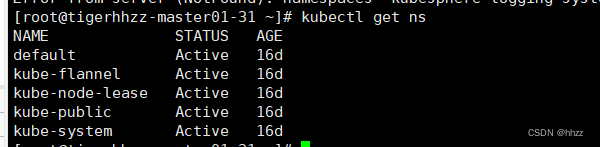
一种删除 KubeSphere 中一直卡在 Terminating 的 Namespace--KubeSphere Logging System的简单方法
文章目录 一、问题提出二、删除方法1,获取kubesphere-logging-syste的详细信息json文件2,编辑kubesphere-logging-system.json3,执行清理命令 三、检查结果 一、问题提出 在使用 KubeSphere 的时候发现有一个日志服务KubeSphere Logging Sys…...

Flink1.17实战教程(第七篇:Flink SQL)
系列文章目录 Flink1.17实战教程(第一篇:概念、部署、架构) Flink1.17实战教程(第二篇:DataStream API) Flink1.17实战教程(第三篇:时间和窗口) Flink1.17实战教程&…...

nest定时任务调用service报错
报错: ERROR [Scheduler] ValidationError: Using global EntityManager instance methods for context specific actions is disallowed. If you need to work with the global instances identity map, use allowGlobalContext configuration option or fork() i…...
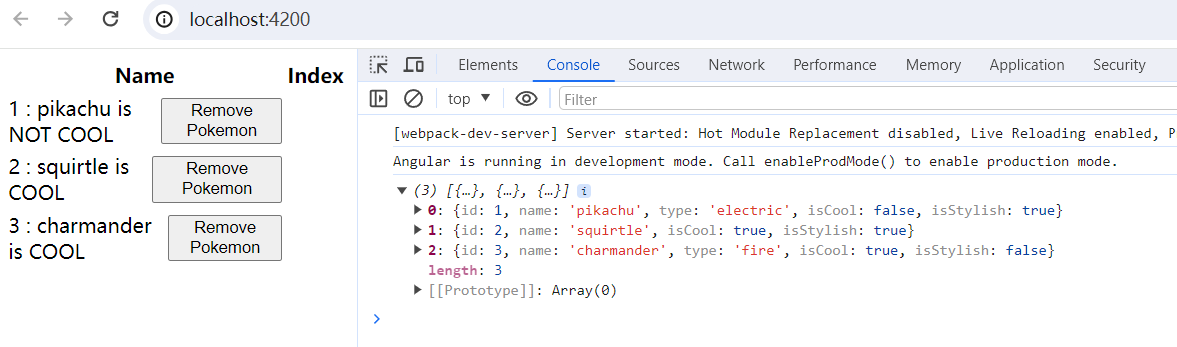
[Angular] 笔记 11:可观察对象(Observable)
chatgpt: 在 Angular 中,Observables 是用于处理异步数据流的重要工具。它们被广泛用于处理从异步操作中获取的数据,比如通过 HTTP 请求获取数据、定时器、用户输入等。Observables 提供了一种机制来订阅这些数据流,并可以在数据到达时执行相…...
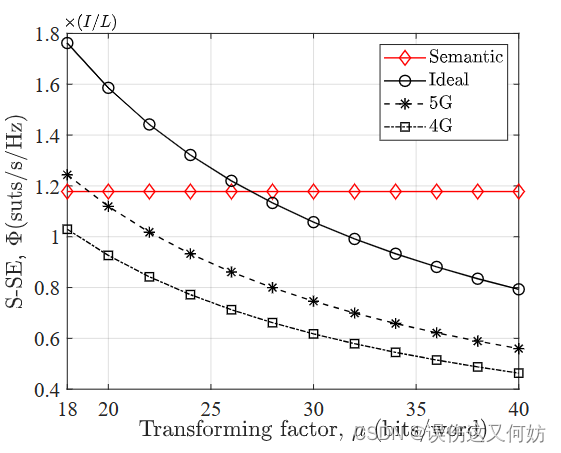
【论文阅读】Resource Allocation for Text Semantic Communications
这是一篇关于语义通信中资源分配的论文。全文共5页,篇幅较短。 目录在这里 摘要关键字引言语义通信资源分配贡献公式符号 系统模型DeepSC TransmitterTransmission ModelDeepSC Receiver 语义感知资源分配策略Semantic Spectral Efficiency (S-SE&#…...
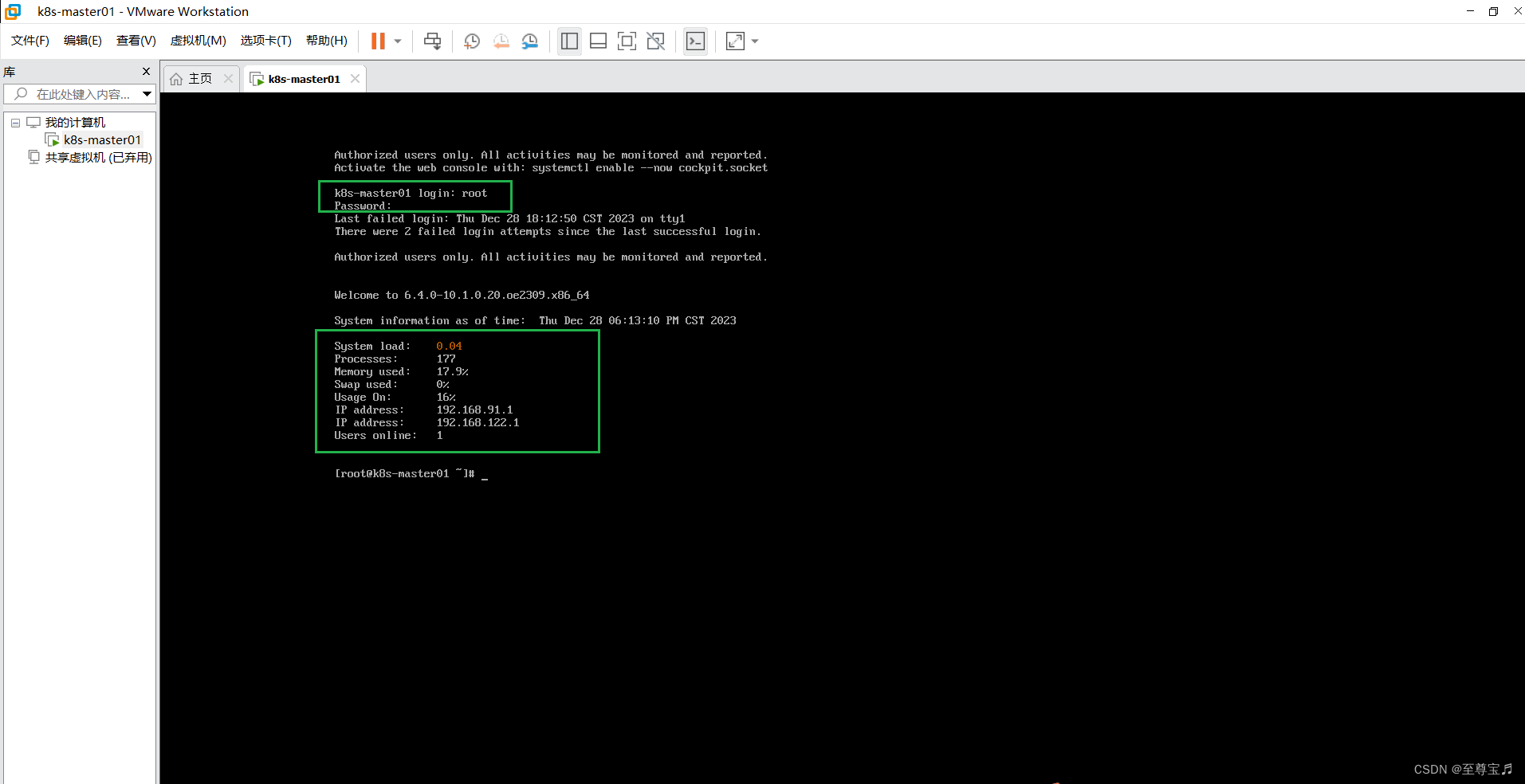
VMware16 pro 安装openEuler-23.09-x86_64,详细操作流程+详图。
1.环境: win11, vmware16 pro, openEuler-23.09-x86_64-dvd.iso 社区版openEuler 23.09官方下载地址: openEuler下载 | 欧拉系统ISO镜像 | openEuler社区官网欧拉操作系统(openEuler, 简称“欧拉”)是面向数字基础设施的操作系统,支持服务器、云计算、…...

Mybatis 动态 SQL - script,bind,多数据库支持
script 在使用注解的映射器类中使用动态SQL时,可以使用<script>元素。例如: Update({"<script>","update Author"," <set>"," <if testusername ! null>username#{username},</if&g…...

Scikit-Learn线性回归(一)
Scikit-Learn线性回归一 1、线性回归概述1.1、回归1.2、线性1.3、线性回归1.4、线性回归的优缺点1.5、线性回归与逻辑回归2、线性回归的原理2.1、线性回归的定义与原理2.2、线性回归的损失函数3、Scikit-Learn线性回归3.1、Scikit-Learn库3.2、Scikit-Learn线性回归API3.3、Sci…...

Mybatis 动态 SQL - choose, when, otherwise
有时候我们并不希望所有的条件都生效,而是只想在多个选项中选择一个。类似于Java中的switch语句,MyBatis提供了 <choose>元素。 让我们使用上面的例子,但现在如果提供了标题,则只搜索标题;如果提供了作者&a…...
idea Spring Boot项目使用JPA创建与数据库链接
1.pom.xml文件中添加依赖 <dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-data-jpa</artifactId></dependency><dependency><groupId>com.mysql</groupId><artifactId>…...

如何使用pretty-ts-errors:TypeScript错误追踪与性能优化终极指南
如何使用pretty-ts-errors:TypeScript错误追踪与性能优化终极指南 【免费下载链接】pretty-ts-errors 🔵 Make TypeScript errors prettier and human-readable in VSCode 🎀 项目地址: https://gitcode.com/gh_mirrors/pr/pretty-ts-error…...

北京数据恢复公司排名哪家好
在当今数字化时代,数据的重要性不言而喻。无论是个人用户的珍贵照片、文档,还是企业的重要业务数据,一旦丢失都可能造成巨大的损失。在北京,有众多的数据恢复公司,如何选择一家靠谱的公司成为了许多人关心的问题。下面…...

加州DMV十年自动驾驶报告深度解析:从测试数据看行业格局与技术演进
1. 项目概述:一份数据,十年自动驾驶风云如果你关注自动驾驶,那你一定听说过加州车管局(DMV)的年度测试报告。这玩意儿,可以说是全球自动驾驶行业的“晴雨表”和“成绩单”。从2015年开始,加州就…...

分数阶傅里叶变换在声纳阵列分析中的应用与优化
1. 分数阶傅里叶变换在声纳阵列分析中的核心价值在水下声学工程领域,准确计算声纳阵列的辐射模式一直是个技术难点。传统FFT算法虽然计算效率高,但在处理特定方位角的辐射特性时存在明显的精度局限。2005年日本防卫厅技术研究本所的这项研究,…...

从服务器到手机:手把手教你修改游戏客户端IP,让私服在手机上跑起来
移动游戏私服客户端IP修改实战指南 当你在服务器上成功部署了游戏私服后,最令人沮丧的莫过于发现手机上的官方客户端无法连接到你的私人服务器。这个看似简单的"最后一公里"问题,往往成为许多私服搭建者的拦路虎。本文将彻底解决这个痛点&…...
)
别再写面条代码了!用C语言状态机重构你的单片机项目(附51单片机HSM可移植框架)
从面条代码到优雅架构:用HSM状态机重构嵌入式系统的实战指南 当你面对一个智能家居设备的嵌入式项目,代码里充斥着数百行的if-else嵌套和switch-case分支,每次添加新功能都像是在一碗已经坨掉的面条上再浇一勺酱料——这样的开发体验…...

别只盯着SQL了!GaussDB健康度巡检,这5个‘外围’命令和日志文件更重要
别只盯着SQL了!GaussDB健康度巡检,这5个‘外围’命令和日志文件更重要 当数据库出现性能波动时,大多数DBA的第一反应是检查慢SQL或调整参数。但根据某金融客户的生产环境统计,超过60%的数据库故障其实源于日志溢出、网络闪断或备份…...

戴尔G15终极散热解决方案:TCC-G15完整使用指南
戴尔G15终极散热解决方案:TCC-G15完整使用指南 【免费下载链接】tcc-g15 Thermal Control Center for Dell G15 - open source alternative to AWCC 项目地址: https://gitcode.com/gh_mirrors/tc/tcc-g15 还在为戴尔G15笔记本的高温问题而烦恼吗?…...

彻底告别Ubuntu 20.04休眠唤醒黑屏:除了降级驱动,你还可以这样一劳永逸地禁用挂起
彻底告别Ubuntu 20.04休眠唤醒黑屏:系统级电源管理优化指南 如果你正在使用Ubuntu 20.04并频繁遭遇休眠唤醒后的黑屏问题,这篇文章将为你提供一套完整的解决方案。不同于常见的驱动降级方案,我们将从系统配置层面入手,通过调整电源…...
)
告别PPO采样地狱!用SAC算法在连续控制任务中实现高效训练(附PyTorch代码)
SAC算法实战:突破PPO采样瓶颈的连续控制解决方案 在机器人控制、自动驾驶和游戏AI开发中,强化学习工程师们经常面临一个共同困境:算法需要与环境进行海量交互才能学到有效策略。以Ant机器人行走任务为例,传统PPO算法可能需要500万…...