unity学习笔记----游戏练习0
一、修复植物种植的问题
1.当手上存在植物时,再次点击卡片上的植物就会在手上添加新的植物,需要修改成只有手上没有植物时才能再次获取到植物。需要修改AddPlant方法。
public bool AddPlant(PlantType plantType)
{
//防止手上出现多个植物
if (currentPant != null) return false;
PlantManagr plantPrefab = GetPlantPrefab(plantType);
if(plantPrefab != null)
{
//这里需要注意的是,上面拿到的是PlantManagr,当我们去是实例化这个组件就相当于去实例化这个组件所在的GammeObject。
currentPant = GameObject.Instantiate(plantPrefab);
}
else
{
Debug.Log("游戏物体不存在");
return false;
}
return true;
}
只有当手上没有植物时点击卡片上的植物才会获取植物。
修改点击事件,增加一个条件只有AddPlant方法返回为true时才能执行后续代码。
public void Onclick()
{
if (needSunPoint > SunManager.Instance.SunPoint) return;
//TODO:并进行种植
bool isSuccess = HandManager.Instance.AddPlant(plantType);
//返回true说明手上还有植物不能再次执行点击事件。
if (isSuccess)
{
SunManager.Instance.SubSun(needSunPoint);
TransitionToCooling();
}
}
这样修改后当手上存在有植物时不会再次获取到植物在手上。
2.当植物在手上时得让植物存于禁用状态
添加一个用于转换的Disable状态的方法。
private void TransitionToDisable()
{
plantState = PlantState.Disable;
}
同时还需要将其的Animator,在植物拿在手上时不能播放动画。
GetComponent<Animator>().enabled = false;
二、植物种植在地面功能实现
当鼠标点击哪个格子就把植物种植在对应的植物上,如何判断鼠标点击到了哪个格子呢?因此就要给每个格子添加一个碰撞器,然后通过碰撞器其判断点击到哪个格子上了 。
创建一个物体用于判断点击到哪个格子,在其身上添加一个组件Box Collider 2D,这样才能判断鼠标是否点击到这个格子上。通过使用OnMouseDown()事件,可以检测鼠标是否点击到这个格子身上,再将其设置为预制体。
现在将碰撞器布满背景,最后效果如下:

然后为这写碰撞器添加一个公共的父类,然后为其预制体添加一个脚本CellControl用来控制自己是否被点击到并将其设置为触发器。
在CellControl中通过使用OnMouseDown()事件去检测自身点击,当被点击时就表示要被种植了,然后将这个点击事件传递给HandManager,因为HandManager是知道要种植的植物的。
为了避免同一个位置可以种植多个植物,再写一个方法来检测并种植当前位置是否存在之植物。
因此在HandManager中写一个方法来调用,代码如下:
public void OnMouseDown()
{
HandManager.Instance.OnCellClicke(this);
}
//检测当前位置是否存在植物
public bool ChechPlant(PlantManagr plant)
{
if (currentPlant != null) return false;
currentPlant = plant;
currentPlant.transform.position = transform.position;
return true;
}
public void OnCellClicke(CellControl cell)
{
Debug.Log("OnCellClicke执行了");
if (currentPlant == null) return;
bool isSuccess = cell.ChechPlant(currentPlant);
Debug.Log(isSuccess);
//将其设置为空不让其在跟随鼠标
if (isSuccess)
{
currentPlant.GetComponent<Animator>().enabled = true;
currentPlant = null;
}
}
效果如下:只有当前位置没有种植过植物才能种植
相关文章:
unity学习笔记----游戏练习0
一、修复植物种植的问题 1.当手上存在植物时,再次点击卡片上的植物就会在手上添加新的植物,需要修改成只有手上没有植物时才能再次获取到植物。需要修改AddPlant方法。 public bool AddPlant(PlantType plantType) { //防止手上出现多个植…...

ai概念:强人工智能介绍、迁移学习
强人工智能(Strong Artificial Intelligence,SAI)是指一种具有与人类智能相媲美或超越人类智能水平的人工智能系统。与弱人工智能(Weak Artificial Intelligence,WAI)不同,强人工智能具有更高级…...

go语言设计模式-单例模式
建造型设计模式-单例模式 是用来控制类型实例的数量的,当需要确保一个类型只有一个实例时,就需要使用单例模式。 即把实例的访问进行收口,不能谁都能 new 类,所以单例模式还会提供一个2访问该实例的全局端口,一般都会…...
超维空间S2无人机使用说明书——51、基础版——使用yolov8进行目标跟踪
引言:为了提高yolo识别的质量,提高了yolo的版本,改用yolov8进行物体识别,同时系统兼容了低版本的yolo,包括基于C的yolov3和yolov4,以及yolov7。 简介,为了提高识别速度,系统采用了G…...

Transformer(seq2seq、self-attention)学习笔记
在self-attention 基础上记录一篇Transformer学习笔记 Transformer的网络结构EncoderDecoder 模型训练与评估 Transformer的网络结构 Transformer是一种seq2seq 模型。输入一个序列,经过encoder、decoder输出结果也是一个序列,输出序列的长度由模型决定…...

2023-12-29 服务器开发-centos部署ftp
摘要: 2023-12-29 服务器开发-centos-部署ftp 部署ftp vsftpd(very secure FTP daemon)是Linux下的一款小巧轻快、安全易用的FTP服务器软件。本教程介绍如何在Linux实例上安装并配置vsftpd。 前提条件 已创建ECS实例并为实例分配了公网IP地址。 背景…...
C卷 (JavaPythonNode.jsC语言C++))
螺旋数字阵(100%用例)C卷 (JavaPythonNode.jsC语言C++)
疫情期间,小明隔离在家,百无聊赖,在纸上写数字玩。他发明了一种写法: 给出数字个数n和行数m (0 < n <= 999,0 < m <= 999) ,从左上角的1开始,按照顺时针螺旋向内写方式,依次写出2,3...n,最终形成一个m行矩阵 小明对这个矩阵有些要求 1.每行数字的个数一样多…...
(二))
AUTOSAR从入门到精通-网络通信(UDPNm)(二)
目录 前言 原理 UdpNm工作原理 UdpNm与CanNM的区别联系 网络管理算法...
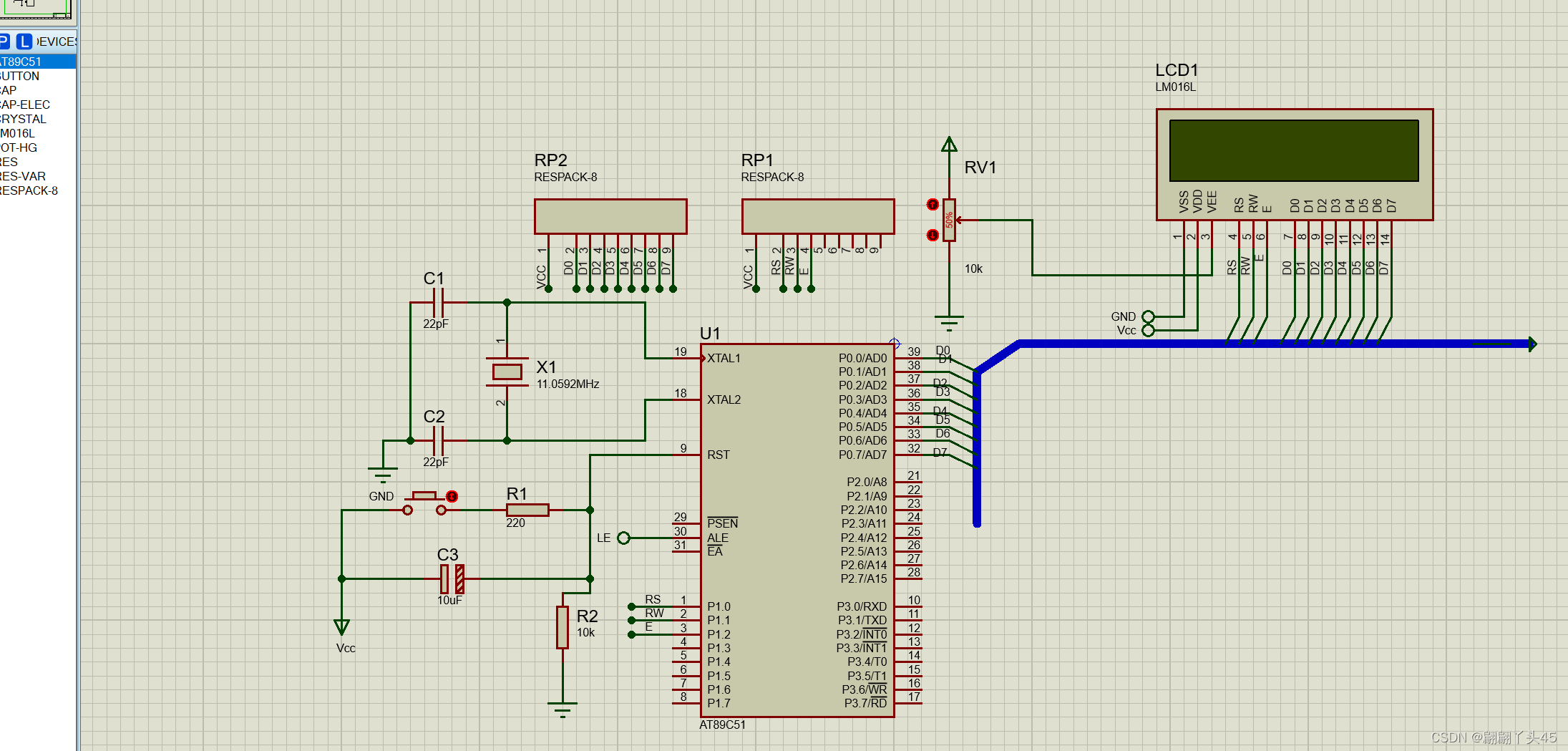
显示器与按键(LCD 1602 + button)
一、实验目的: (1)学习lcd 1602的编程与使用、 (2)机械式复位开关button软件消抖的方法。 二、实验内容: 1、必做:先显示开机画面,:在1602显示器上,分两行…...

2020年认证杯SPSSPRO杯数学建模B题(第一阶段)分布式无线广播全过程文档及程序
2020年认证杯SPSSPRO杯数学建模 B题 分布式无线广播 原题再现: 以广播的方式来进行无线网通信,必须解决发送互相冲突的问题。无线网的许多基础通信协议都使用了令牌的方法来解决这个问题,在同一个时间段内,只有唯一一个拿到令牌…...

【CISSP学习笔记】7. 安全评估与测试
该知识领域涉及如下考点,具体内容分布于如下各个子章节: 设计和验证评估、测试和审计策略进行安全控制测试收集安全过程数据(例如,技术和管理)分析测试输出并生成报告执行或协助安全审计 7.1. 构建安全评估和测试方案…...
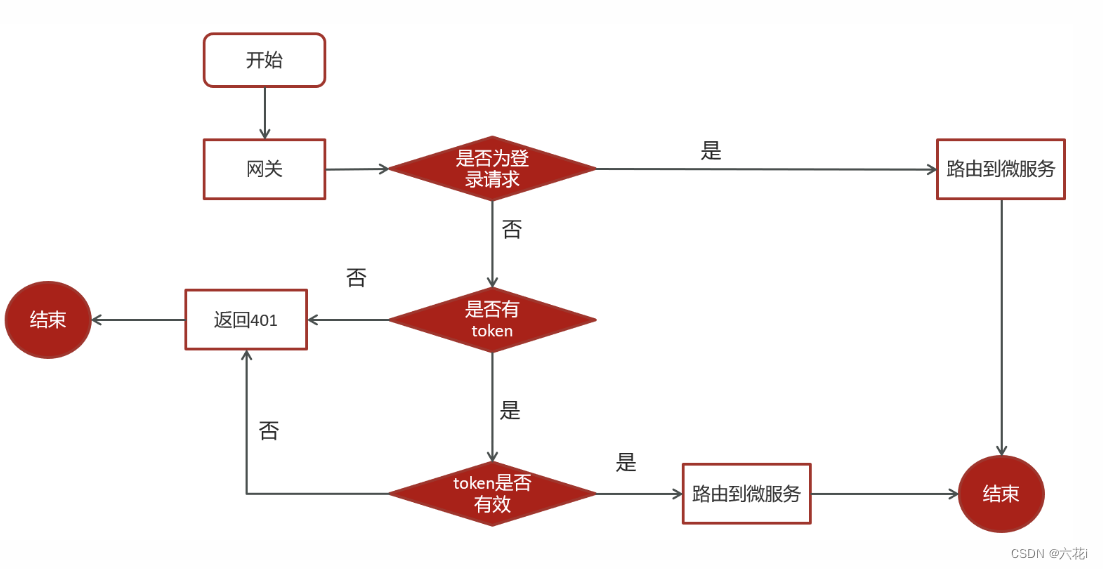
Gateway集成方法以及拦截器和过滤器的使用
前提:请先创建好一个SpringBoot项目 1. 引入依赖 SpringCloud 和 alibabaCloud 、 SpringBoot间对版本有强制要求,我使用的springboot是3.0.2的版本。版本对应关系请看:版本说明 alibaba/spring-cloud-alibaba Wiki GitHub <dependency…...
第G2周:人脸图像生成(DCGAN)
🍨 本文为[🔗365天深度学习训练营学习记录博客\n🍦 参考文章:365天深度学习训练营\n🍖 原作者:[K同学啊 | 接辅导、项目定制]\n🚀 文章来源:[K同学的学习圈子](https://www.yuque.co…...

【Web】Ctfshow Thinkphp5 非强制路由RCE漏洞
目录 非强制路由RCE漏洞 web579 web604 web605 web606 web607-610 前面审了一些tp3的sql注入,终于到tp5了,要说tp5那最经典的还得是rce 下面介绍非强制路由RCE漏洞 非强制路由RCE漏洞原理 非强制路由相当于开了一个大口子,可以任意调用当前框…...

python3遇到Can‘t connect to HTTPS URL because the SSL module is not available.
远程服务器centos7系统上有minicoda3,觉得太占空间,就把整个文件夹删了,原先的Python3也没了,都要重装。 我自己的步骤:进入管理员模式 1.下载Python3的源码: wget https://www.python.org/ftp/python/3.1…...

QSPI Flash xip取指同时program过程中概率性出现usb播歌时断音
项目场景: USB Audio芯片,代码放到qspi flash中,执行代码时,客户会偶尔保存一些参数,即FPGA验证过程中,每隔10ms向flash info区烧写4个byte(取指过程一直存在,且时隙软件不可控&…...

MySQL聚簇索引和非聚簇索引的区别
前言: 聚簇索引和非聚簇索引是数据库中的两种索引类型,他们在组织和存储数据时有不同的方式。 聚簇索引: 简单理解,就是将数据和索引放在了一起,找到了索引也就找到了数据。对于聚簇索引来说,他的非叶子节点上存储的是…...

【C#】蜗牛爬井问题C#控制台实现
文章目录 一、问题描述二、C#控制台代码 一、问题描述 井深30米,蜗牛在井底,每天爬3米又滑下1米,问第几天爬出来 二、C#控制台代码 using System; using System.Collections.Generic; using System.Linq; using System.Text; using System…...
IP地址的四大类型:动态IP、固定IP、实体IP、虚拟IP的区别与应用
在网络通信中,IP地址是设备在互联网上唯一标识的关键元素。动态IP、固定IP、实体IP和虚拟IP是四种不同类型的IP地址,它们各自具有独特的特点和应用场景。 1. 动态IP地址: 动态IP地址是由Internet Service Provider(ISPÿ…...

Linux Debian12安装和使用ImageMagick图像处理工具 常见图片png、jpg格式转webp格式
一、ImageMagick简介 ImageMagick是一套功能强大、稳定而且免费的工具集和开发包。可以用来读、写和图像格式转换,可以处理超过100种图像格式,包括流行的TIFF, JPEG, GIF, PNG, PDF以及PhotoCD等格式。对图片的操作,即可以通过命令行进行&am…...

如何用嘎嘎降AI处理理工科论文:公式图表密集的理工科毕业论文降AI免费完整操作流程
如何用嘎嘎降AI处理理工科论文:公式图表密集的理工科毕业论文降AI免费完整操作流程 帮三个不同学校的同学处理过论文降AI问题,每次情况不完全一样,但流程基本是固定的。 主推工具:嘎嘎降AI(www.aigcleaner.com&#…...

基于MCP协议与AI的智能收据处理服务器:从OCR到结构化提取实战
1. 项目概述:一个专为收据处理而生的MCP服务器如果你经常需要处理各种格式的收据、发票或账单,无论是个人记账、公司报销,还是财务审计,那么你肯定对“数据录入”这个繁琐环节深恶痛绝。一张张纸质或电子收据,上面的关…...
)
MySQL 安装后安全加固实操:从空密码警告到配置安全远程访问(Ubuntu 18.04 + MySQL 5.7)
MySQL 安全加固实战:从空密码警告到生产级配置 在Ubuntu服务器上部署MySQL数据库时,许多开发者会惊讶地发现安装后竟然可以直接用mysql -uroot无密码登录。这种默认配置在生产环境中无异于敞开大门邀请不速之客。本文将带你完成从基础安装到生产级安全配…...

基于Terraform与Ansible的OpenClaw私有化AI代理自动化部署实践
1. 项目概述如果你和我一样,对AI助手的能力有更高的期待,希望它能深度融入你的工作流,甚至能帮你处理一些自动化任务,那么OpenClaw这个项目绝对值得你花时间研究。它不是一个简单的聊天机器人,而是一个可以部署在你私有…...

大模型SFT泛化能力受多因素制约,推理提升或伴随安全性下降
大模型SFT泛化能力研究背景随着大模型后训练(Post - training)技术的发展,强化学习(RL)在提升模型推理能力方面表现备受瞩目。在此背景下,学术界形成了“ SFT记忆,RL泛化(SFT memori…...

微信聊天记录终极备份指南:5步将珍贵对话永久保存到电脑
微信聊天记录终极备份指南:5步将珍贵对话永久保存到电脑 【免费下载链接】WeChatExporter 一个可以快速导出、查看你的微信聊天记录的工具 项目地址: https://gitcode.com/gh_mirrors/wec/WeChatExporter 你是否曾因手机丢失、系统崩溃或更换设备而永远失去了…...

在自动化脚本中集成Taotoken实现按需调用不同大模型的能力
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在自动化脚本中集成Taotoken实现按需调用不同大模型的能力 对于需要处理多种任务的自动化脚本,单一模型往往难以满足所…...

如何使用Android Sunflower构建可预测UI:掌握单向数据流的终极指南
如何使用Android Sunflower构建可预测UI:掌握单向数据流的终极指南 【免费下载链接】sunflower A gardening app illustrating Android development best practices with migrating a View-based app to Jetpack Compose. 项目地址: https://gitcode.com/gh_mirro…...

CodeMaker完整指南:5分钟掌握IntelliJ IDEA智能代码生成插件
CodeMaker完整指南:5分钟掌握IntelliJ IDEA智能代码生成插件 【免费下载链接】CodeMaker A idea-plugin for Java/Scala, support custom code template. 项目地址: https://gitcode.com/gh_mirrors/co/CodeMaker 还在为Java和Scala项目中的重复编码工作而烦…...

nslookup-mcp:基于MCP协议的DNS查询工具部署与实战指南
1. 项目概述:一个为安全与开发场景设计的DNS查询工具如果你经常需要排查网络问题、分析域名配置,或者像我一样,在渗透测试或安全研究时,需要快速、批量地查询DNS记录,那么命令行里的nslookup或dig工具可能已经让你感到…...