RK3566 ANDROID 11 平台上适配移远EC200A
适配前理清楚一下调试的流程:
1.该模块为LGA封装,需要控制上电时序模块才能正常上电工作:
2.模块供电正常后,读取模组的PID 和VID 并将其ID添加到内核里面,确保USB转Serial端口能够正常生成:
3.生成ttyUSB0~ttyUSB2端口后,确保rild进程正常启动,能够正常加载ril库;
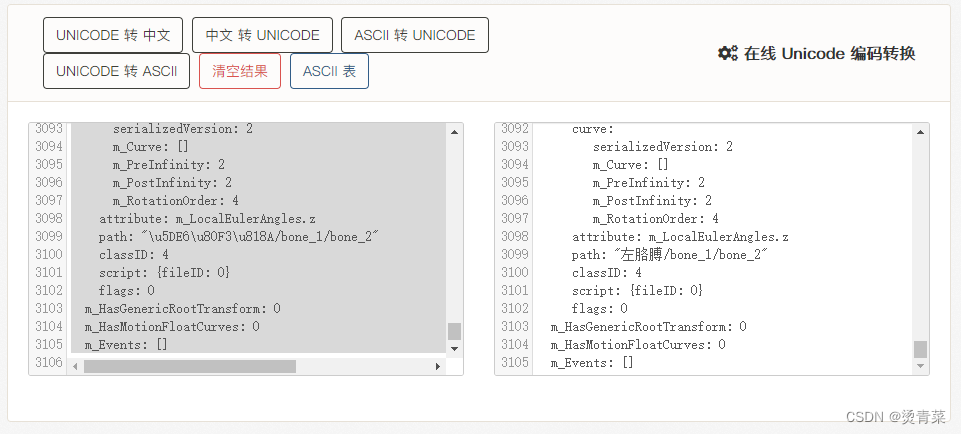
4.查看一下AT命令集,善于捕捉ril log,熟练使用 logcat -b radio,移远方案,可以通过创建文件
/data/quectel_debug_log 来存储RIL 加载信息,同时瑞芯微对应4G模块这方面的资料也是比较完善的,可以阅读一下
RKDocs/common/mobile-net/Rockchip_Introduction_4G_Module_Configuration_CN\&EN.pdf。流程理清楚了,我们就可以在我们的硬件平台上来移植4G模组了。
//偷个懒,将EC200A的module PWR RK0_PB4和reset脚RK0_PB1 控制添加到LED灯的控制驱动里面,
//将 module PWR RK0_PB4 置高,将reset脚RK0_PB1置低#include "rk3566-box.dtsi"/ {model = "Rockchip RK3566 BOX DM35 Project";compatible = "rockchip,rk3568-box-demo-v10", "rockchip,rk3566";gpio-leds {compatible = "gpio-leds";// ir-led {
// gpios = <&gpio4 RK_PC5 GPIO_ACTIVE_HIGH>;
// default-state = "off";
// };//MODULE_PWR GPIO0_B4+ modem-resetled {
+ gpios = <&gpio0 RK_PB1 GPIO_ACTIVE_LOW>;
+ default-state = "on";
+ };+ modem-led {
+ gpios = <&gpio0 RK_PB4 GPIO_ACTIVE_HIGH>;
+ default-state = "on";
+ };work-led { /*led GPIO0_C3_d*/gpios = <&gpio0 RK_PC3 GPIO_ACTIVE_HIGH>;//linux,default-trigger = "timer";default-state = "on";};};-------------------------------------------------------------wireless_bluetooth: wireless-bluetooth {compatible = "bluetooth-platdata";clocks = <&pmucru CLK_RTC_32K>;clock-names = "ext_clock";//wifi-bt-power-toggle;uart_rts_gpios = <&gpio2 RK_PB5 GPIO_ACTIVE_LOW>;pinctrl-names = "default", "rts_gpio";pinctrl-0 = <&uart1m0_rtsn>;pinctrl-1 = <&uart1_gpios>;BT,reset_gpio = <&gpio2 RK_PB7 GPIO_ACTIVE_HIGH>;BT,wake_gpio = <&gpio2 RK_PC1 GPIO_ACTIVE_HIGH>;BT,wake_host_irq = <&gpio2 RK_PC0 GPIO_ACTIVE_HIGH>;status = "okay";};
+//添加4G模块的上电初始化时序,以确保模块能够正常上电工作+rk_modem: rk-modem {+ compatible="4g-modem-platdata";+ pinctrl-names = "default";+ pinctrl-0 = <<e_vbat <e_power_en /*<e_reset*/>;+ 4G,vbat-gpio = <&gpio0 RK_PB3 GPIO_ACTIVE_HIGH>; //VBUS_CTRL+ 4G,power-gpio = <&gpio0 RK_PB2 GPIO_ACTIVE_LOW>; //MODULE_PWRKEY+ //4G,reset-gpio = <&gpio0 RK_PB1 GPIO_ACTIVE_LOW>; //MODULE_RESET_N+ //MODULE_PWR GPIO0_B4+ status = "okay";+};wireless-wlan {wifi_host_wake_irq: wifi-host-wake-irq {rockchip,pins = <2 RK_PB2 RK_FUNC_GPIO &pcfg_pull_down>;};};wireless-bluetooth {uart1_gpios: uart1-gpios {rockchip,pins = <2 RK_PB5 RK_FUNC_GPIO &pcfg_pull_none>;};};+ rk-modem {
+ lte_vbat: lte-vbat {
+ rockchip,pins = <0 RK_PB3 RK_FUNC_GPIO &pcfg_pull_none>;
+ };
+ lte_power_en: lte-power-en {
+ rockchip,pins = <0 RK_PB2 RK_FUNC_GPIO &pcfg_pull_none>;
+ };
+// lte_reset: lte-reset {
+// rockchip,pins = <0 RK_PB1 RK_FUNC_GPIO &pcfg_pull_none>;
+// };};修改完这些之后,使用lsusb命令查看模块的PID和VID
Bus 005 Device 001: ID 1d6b:0002
Bus 003 Device 001: ID 1d6b:0001
Bus 001 Device 001: ID 1d6b:0002
Bus 008 Device 001: ID 1d6b:0003
Bus 006 Device 001: ID 1d6b:0003
Bus 001 Device 004: ID 2c7c:6005
Bus 004 Device 001: ID 1d6b:0001
Bus 002 Device 001: ID 1d6b:0002
Bus 007 Device 001: ID 1d6b:0002上面显示的2c7c:6005就是我们4G模块的VID和PID,这说明我们的上电时序已经修改成了,接下来修改内核,添加模块的VID和PIDgit diff arch/arm64/configs/rockchip_defconfig
diff --git a/kernel/arch/arm64/configs/rockchip_defconfig b/kernel/arch/arm64/configs/rockchip_defconfig
index 3c1008aab5..66a6cc02a9 100644
--- a/kernel/arch/arm64/configs/rockchip_defconfig
+++ b/kernel/arch/arm64/configs/rockchip_defconfig
@@ -776,6 +776,7 @@ CONFIG_USB_UAS=yCONFIG_USB_DWC3=yCONFIG_USB_DWC2=yCONFIG_USB_SERIAL=y
+CONFIG_USB_SERIAL_WWAN=yCONFIG_USB_SERIAL_GENERIC=yCONFIG_USB_SERIAL_OPTION=yCONFIG_USB_SERIAL_CH341=ykernel$ git diff drivers/usb/serial/option.c
diff --git a/kernel/drivers/usb/serial/option.c b/kernel/drivers/usb/serial/option.c
index ff67562572..497ca259de 100644
--- a/kernel/drivers/usb/serial/option.c
+++ b/kernel/drivers/usb/serial/option.c
@@ -2126,6 +2126,23 @@ static const struct usb_device_id option_ids[] = {{ USB_DEVICE_INTERFACE_CLASS(0x305a, 0x1404, 0xff) }, /* GosunCn GM500 RNDIS */{ USB_DEVICE_INTERFACE_CLASS(0x305a, 0x1405, 0xff) }, /* GosunCn GM500 MBIM */{ USB_DEVICE_INTERFACE_CLASS(0x305a, 0x1406, 0xff) }, /* GosunCn GM500 ECM/NCM */
+#if 1 //Added by Quectel
+#if 1 //Added by Quectel
diff --git a/kernel/drivers/usb/serial/option.c b/kernel/drivers/usb/serial/option.c
index ff67562572..497ca259de 100644
--- a/kernel/drivers/usb/serial/option.c
+++ b/kernel/drivers/usb/serial/option.c
@@ -2126,6 +2126,23 @@ static const struct usb_device_id option_ids[] = {{ USB_DEVICE_INTERFACE_CLASS(0x305a, 0x1404, 0xff) }, /* GosunCn GM500 RNDIS */{ USB_DEVICE_INTERFACE_CLASS(0x305a, 0x1405, 0xff) }, /* GosunCn GM500 MBIM */{ USB_DEVICE_INTERFACE_CLASS(0x305a, 0x1406, 0xff) }, /* GosunCn GM500 ECM/NCM */
+#if 1相关文章:

RK3566 ANDROID 11 平台上适配移远EC200A
适配前理清楚一下调试的流程: 1.该模块为LGA封装,需要控制上电时序模块才能正常上电工作: 2.模块供电正常后,读取模组的PID 和VID 并将其ID添加到内核里面,确保USB转Serial端口能够正常生成: 3.生成ttyUSB0~ttyUSB2端口后,确保rild进程正常启动,能够正常加载ril库; …...
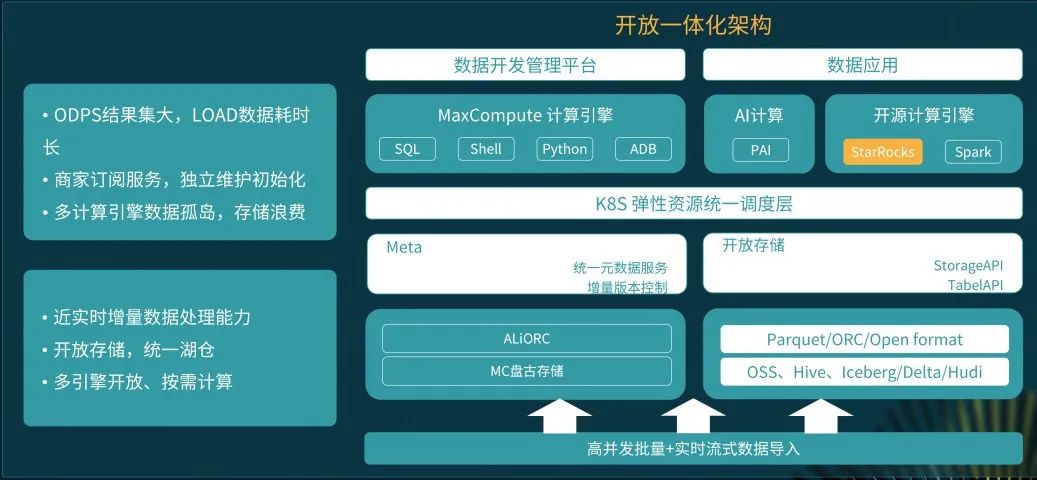
存算分离降本增效,StarRocks 助力聚水潭 SaaS 业务服务化升级
作者:聚水潭数据研发负责人 溪竹 聚水潭是中国领先的 SaaS 软件服务商,核心产品是电商 ERP,协同350余家电商平台,为商家提供综合的信息化、数字化解决方案。公司是偏线下商家侧的 toB 服务商,员工人数超过3500…...

Linux 内核学习笔记: hlist 的理解
前言 最近阅读 Linux 内核时,遇到了 hlist,这个 hlist 用起来像是普通的链表,但是为何使用 hlist,hlist 是怎么工作的? 相关代码 hlist_add_head(&clk->clks_node, &core->clks); /*** clk_core_link_…...

几种设计模式介绍
前言 设计模式是一种用于解决软件开发中常见问题的通用解决方案,它可以提高代码的可读性、可维护性和可复用性。前端开发中也有很多应用设计模式的场景,比如处理异步操作、优化性能、封装复杂逻辑等。 前端开发中常见的设计模式有以下几种: …...
 jenkins迁移到另一个机器)
拓展操作(三) jenkins迁移到另一个机器
让清单成为一种习惯 互联网时代的变革,不再是简单的开发部署上线,持续,正确,安全地把事情做好尤其重要;把事情做好的前提是做一个可量化可执行的清单,让工程师就可以操作的清单而不是专家才能操作: 设定检查点 根据节点执行检查程序操作确认或边读边做 二者选其一不要太…...
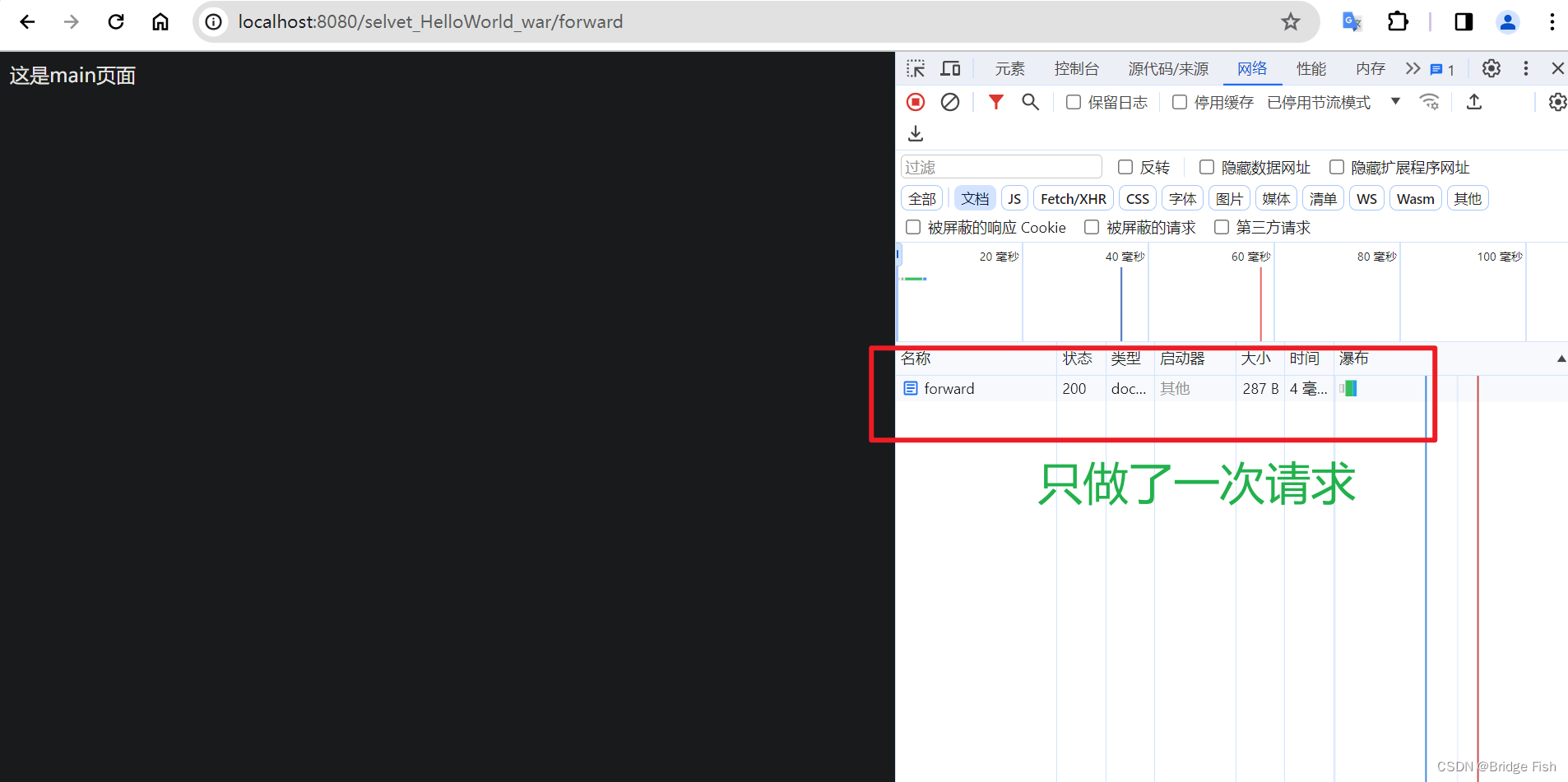
重定向和转发的区别
重定向 1、定义 用户通过浏览器发送一个请求,Tomcat服务器接收这个请求,会给浏览器发送一个状态码302,并设置一个重定向的路径,浏览器如果接收到了这个302的状态码以后,就会去自动加载服务器设置的路径 一个页面跳转…...

基于ElementUI二次封装弹窗组件
效果: 一、自定义内容类型弹窗 <!-- title:对话框的标题confirmLoading:当前是否处于提交中titleCenter:对话框标题居中方式footerCenter:底部按钮的对其方式visible:是否显示弹窗width:设置…...

linux cat命令改变功能显示当前文件行号
linux的cat命令使用-n显示多个文件行号时,行号是累加的,不是到了新文件就重新计数。这样满足不了我的需求。如果到了新文件能够重新计数,就能使用-nf(在上一篇-f显示文件名功能的基础上)加| grep xxx,既能直…...
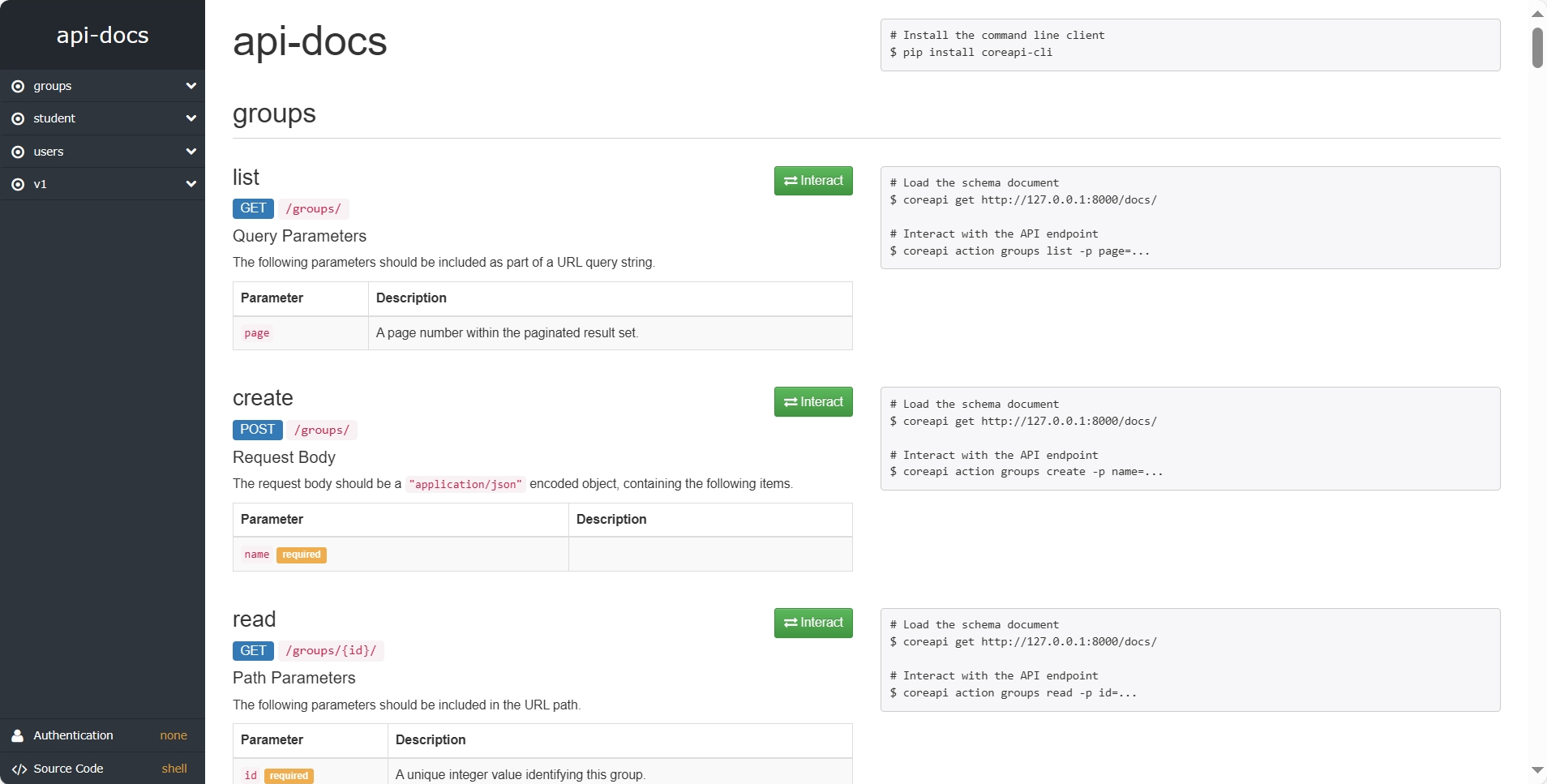
Django-REST-Framework 如何快速生成Swagger, ReDoc格式的 REST API 文档
1、API 接口文档的几种规范格式 前后端分离项目中,使用规范、便捷的API接口文档工具,可以有效提高团队工作效率。 标准化的API文档的益处: 允许开发人员以交互式的方式查看、测试API接口,以方便使用将所有可暴露的API接口进行分…...

SpringBoot当中的Singleton和Prototype详解
在Spring Boot中,Singleton和Prototype是两种Bean的作用域。这两种作用域决定了Spring容器如何创建和管理Bean的实例。 Singleton(单例): 当一个Bean被配置为Singleton作用域时,Spring容器在启动时只会创建该Bean的一个…...

LeetCode第1题 - 两数之和
题目 给定一个整数数组 nums 和一个目标值 target,请你在该数组中找出和为目标值的那 两个 整数,并返回他们的数组下标。 你可以假设每种输入只会对应一个答案。但是,你不能重复利用这个数组中同样的元素。 示例 给定 nums [2, 7, 11, 15], …...
(14)Linux 地址空间的理解
前言:本章核心主题为 "进程地址空间"。 一、Linux 进程地址空间 程序地址空间是内存吗?不是!程序地址空间不是内存! 其实,我们称之为程序地址空间都不准确,应该叫 进程地址空间,这…...

Java中的设计模式
设计模式是软件开发中常见问题的可重用解决方案。在Java中,设计模式有助于提高代码的可维护性、可读性和可扩展性。以下是一篇关于Java中设计模式的文章,以帮助您更好地理解这些模式。 一、设计模式简介 设计模式是经过验证的解决方案,用于…...

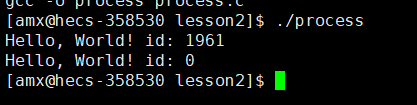
Hadoop(2):常见的MapReduce[在Ubuntu中运行!]
1 以词频统计为例子介绍 mapreduce怎么写出来的 弄清楚MapReduce的各个过程: 将文件输入后,返回的<k1,v1>代表的含义是:k1表示偏移量,即v1的第一个字母在文件中的索引(从0开始数的);v1表…...
Unity | 快速修复Animation missing错误
目录 一、背景 二、效果 三、解决办法 一、背景 最近在做2D 骨骼动画相关的Demo,我自己使用Unity引擎进行骨骼绑定并创建了anim后,一切正常,anim也能播放。但是昨天我修改Obj及子物体的名称(由中文改为英文,如&…...

ssm基于web的志愿者管理系统的设计与实现+vue论文
摘 要 使用旧方法对志愿者管理系统的信息进行系统化管理已经不再让人们信赖了,把现在的网络信息技术运用在志愿者管理系统的管理上面可以解决许多信息管理上面的难题,比如处理数据时间很长,数据存在错误不能及时纠正等问题。这次开发的志愿者…...
)
C++运算符重载(插入and提取)
介绍 本文主要介绍 插入(>>) and 提取(<<)的运算符重载 1.插入(>>) 提取(<<)只能是友元函数 2.插入关键词istream 例子:istream& operator>>(istream& in, sumber&Left) 3.提取关键词ostream 例子:ostream&a…...
C#高级 08Json操作
1.概念 Json是存储和交换文本信息的语法。类似于XML。Json比XML更小、更快、更易解析。Json与XML一样是一种数据格式。Json是一种轻量级的数据交换格式。它基于ECMAScript的一个子集。Json采取完全独立于语言的文本格式, 但是也使用了类似于C语言的习惯。这些特性使…...

封装uniapp签字板
新开发的业务涉及到签字功能,由于是动态的表单,无法确定它会出现在哪里,不得已封装模块。 其中涉及到一个难点就是this的指向性问题, 第二个是微信小程序写法, 我这个写法里用了u-view的写法,可以自己修改组…...

Mybatis行为配置之Ⅳ—日志
专栏精选 引入Mybatis Mybatis的快速入门 Mybatis的增删改查扩展功能说明 mapper映射的参数和结果 Mybatis复杂类型的结果映射 Mybatis基于注解的结果映射 Mybatis枚举类型处理和类型处理器 再谈动态SQL Mybatis配置入门 Mybatis行为配置之Ⅰ—缓存 Mybatis行为配置…...

Poppins字体:免费开源的现代几何无衬线字体终极指南
Poppins字体:免费开源的现代几何无衬线字体终极指南 【免费下载链接】Poppins Poppins, a Devanagari Latin family for Google Fonts. 项目地址: https://gitcode.com/gh_mirrors/po/Poppins 你是否正在寻找一款既美观又实用的字体来提升设计项目的视觉品质…...

Platinum-MD完整指南:跨平台NetMD音乐传输解决方案深度解析
Platinum-MD完整指南:跨平台NetMD音乐传输解决方案深度解析 【免费下载链接】platinum-md Minidisc NetMD Conversion and Upload 项目地址: https://gitcode.com/gh_mirrors/pl/platinum-md Platinum-MD是一款专为NetMD MiniDisc设备设计的现代化音乐管理工…...

芯片原型开发实战指南:从虚拟原型到FPGA的决策与调试
1. 原型决策前的核心考量:一份来自一线的深度清单在硬件和系统设计领域,原型开发是连接构想与现实的桥梁,但这座桥怎么搭、用什么材料、何时能通车,每一步都充满了抉择。很多团队在项目启动时,满腔热情地喊着“先做个原…...
)
老笔记本焕发第二春:微星GT60升级GTX1060保姆级避坑指南(含硬件ID修改)
微星GT60笔记本升级GTX1060全流程实战:从硬件改造到驱动破解 当手头的微星GT60笔记本逐渐跟不上现代游戏需求时,许多玩家会考虑升级显卡来延续它的使用寿命。MXM接口的GTX1060显卡因其性价比和性能表现成为热门选择,但整个升级过程充满技术陷…...
)
Azure VM SSH被锁死?别慌,用Serial Console这招救活你的服务器(亲测有效)
Azure VM SSH被锁死?Serial Console终极救援指南 当你在Azure VM上误操作sshd_config导致SSH被完全锁死时,那种绝望感就像被困在数字孤岛。常规的RDP、Bastion甚至重建VM都无济于事——直到发现Serial Console这个隐藏的救命通道。作为经历过同样噩梦的运…...

1k Star的p-retry,让异步操作失败自动重试
文章目录1k Star的p-retry,让异步操作失败自动重试核心功能适用场景注意事项1k Star的p-retry,让异步操作失败自动重试 sindresorhus开源的p-retry项目,目前在GitHub上获得1009个Star。这个库的核心功能是为异步操作添加重试机制,…...

我跟踪了100位测试工程师的5年成长轨迹,发现成功者都踩准了这三个节点
五年,对于软件测试工程师而言,是一道清晰的分水岭。有人依然困在重复的手工用例里,薪资徘徊在行业均线以下;有人却完成了从执行者到架构者、从成本中心到价值中心的跃迁,成为团队里不可替代的角色。过去五年࿰…...

Postman实战:自动化管理API访问令牌的两种高效策略
1. 为什么需要自动化管理API访问令牌 在如今的API开发中,身份验证和授权已经成为必不可少的安全机制。大多数现代API都采用基于令牌(Token)的认证方式,其中Bearer Token是最常见的标准之一。想象一下,每次调用API都需要手动复制粘贴一长串Tok…...

Arduino程序背后的秘密:从setup/loop到main函数,带你读懂官方核心库源码
Arduino程序背后的秘密:从setup/loop到main函数,带你读懂官方核心库源码 当你第一次打开Arduino IDE,写下setup()和loop()函数时,有没有想过这些代码最终是如何在硬件上运行的?为什么我们不需要写main函数?…...

HoRain云--Lua元表:解锁高级编程技巧
🎬 HoRain云小助手:个人主页 🔥 个人专栏: 《Linux 系列教程》《c语言教程》 ⛺️生活的理想,就是为了理想的生活! ⛳️ 推荐 前些天发现了一个超棒的服务器购买网站,性价比超高,大内存超划算!…...