【ROS2】MOMO的鱼香ROS2(五)ROS2入门篇——ROS2接口与自定义
ROS2接口与自定义
- 引言
- 1 ROS2自带接口
- 1.1 ROS2通用标准消息包
- 1.2 ROS2传感器消息包
- 1.3 ROS2几何相关消息包
- 2 ROS2接口介绍
- 2.1 常用CLI命令
- 2.2 原始数据类型与包装类型
- 3 自定义接口示例
- 3.1 接口定义
- 3.2 自定义接口RCLPY
引言
笔者跟着鱼香ROS的ROS2学习之旅
学习参考:
【ROS2机器人入门到实战】
笔者的学习目录
- MOMO的鱼香ROS2(一)ROS2入门篇——从Ubuntu操作系统开启
- MOMO的鱼香ROS2(二)ROS2入门篇——ROS2初体验
- MOMO的鱼香ROS2(三)ROS2入门篇——ROS2第一个节点
- MOMO的鱼香ROS2(四)ROS2入门篇——ROS2节点通信之话题与服务
1 ROS2自带接口
接口其实是一种规范
1.1 ROS2通用标准消息包
ros2 interface package std_msgs
std_msgs/msg/String
std_msgs/msg/ByteMultiArray
std_msgs/msg/UInt16
std_msgs/msg/UInt64
std_msgs/msg/UInt8
std_msgs/msg/Int64MultiArray
std_msgs/msg/UInt32MultiArray
std_msgs/msg/UInt16MultiArray
std_msgs/msg/Float32MultiArray
std_msgs/msg/MultiArrayDimension
std_msgs/msg/Float64MultiArray
std_msgs/msg/Int8
std_msgs/msg/Byte
std_msgs/msg/Bool
std_msgs/msg/Int32
std_msgs/msg/Int16
std_msgs/msg/Float64
std_msgs/msg/Header
std_msgs/msg/Char
std_msgs/msg/Int64
std_msgs/msg/MultiArrayLayout
std_msgs/msg/Int16MultiArray
std_msgs/msg/Float32
std_msgs/msg/UInt64MultiArray
std_msgs/msg/UInt8MultiArray
std_msgs/msg/Int8MultiArray
std_msgs/msg/Int32MultiArray
std_msgs/msg/UInt32
std_msgs/msg/ColorRGBA
std_msgs/msg/Empty
以下是一些 std_msgs 中的常见消息类型:
Header: 包含 ROS 消息的标准头部信息,如时间戳和坐标系。
uint32 seq
time stamp
string frame_id
String: 代表字符串。
string data
Bool: 代表布尔值。
bool data
Int8, Int16, Int32, Int64: 代表有符号整数,分别为 8 位、16 位、32 位和 64 位。
int8 data
int16 data
int32 data
int64 data
UInt8, UInt16, UInt32, UInt64: 代表无符号整数,分别为 8 位、16 位、32 位和 64 位。
uint8 data
uint16 data
uint32 data
uint64 data
Float32, Float64: 代表单精度和双精度浮点数。
float32 data
float64 data
这些消息类型可以广泛应用于 ROS 中的不同节点,用于传递基本的数据信息。例如,一个节点可以发布一个包含测量值的 Float32 消息,而另一个节点可以订阅这个消息以获取测量值。
1.2 ROS2传感器消息包
ros2 interface package sensor_msgs
sensor_msgs/msg/PointCloud
sensor_msgs/msg/CompressedImage
sensor_msgs/msg/Image
sensor_msgs/msg/PointField
sensor_msgs/msg/LaserEcho
sensor_msgs/msg/BatteryState
sensor_msgs/msg/MultiDOFJointState
sensor_msgs/msg/NavSatFix
sensor_msgs/msg/Joy
sensor_msgs/msg/MultiEchoLaserScan
sensor_msgs/msg/LaserScan
sensor_msgs/msg/JoyFeedbackArray
sensor_msgs/msg/MagneticField
sensor_msgs/msg/ChannelFloat32
sensor_msgs/msg/RegionOfInterest
sensor_msgs/msg/NavSatStatus
sensor_msgs/msg/Range
sensor_msgs/msg/Illuminance
sensor_msgs/msg/RelativeHumidity
sensor_msgs/msg/Temperature
sensor_msgs/msg/FluidPressure
sensor_msgs/msg/JointState
sensor_msgs/srv/SetCameraInfo
sensor_msgs/msg/Imu
sensor_msgs/msg/CameraInfo
sensor_msgs/msg/JoyFeedback
sensor_msgs/msg/TimeReference
sensor_msgs/msg/PointCloud2
以下是 sensor_msgs 中的一些常见消息类型:
Image: 用于传递图像数据,包括图像的像素数据、编码格式、时间戳等。
Header header
uint32 height
uint32 width
string encoding
uint8 is_bigendian
uint32 step
uint8[] data
CameraInfo: 包含相机的信息,如相机矩阵、畸变参数等。
Header header
uint32 height
uint32 width
string distortion_model
float64[] D
float64[] K
float64[] R
float64[] P
uint32[] binning_x
uint32[] binning_y
sensor_msgs/RegionOfInterest roi
PointCloud2: 用于传递点云数据,包括点的坐标、颜色等信息。
Header header
bool is_dense
string[] fields
uint8 INT8 = 1
uint8 UINT8 = 2
uint8 INT16 = 3
uint8 UINT16 = 4
uint8 INT32 = 5
uint8 UINT32 = 6
uint8 FLOAT32 = 7
uint8 FLOAT64 = 8
uint8 point_step
uint8[] data
uint32 row_step
uint32 width
uint32 height
sensor_msgs/PointField[] fields
bool is_bigendian
uint32 point_step
uint32 row_step
uint32 data_length
uint8[] data
LaserScan: 用于传递激光扫描数据。
Header header
float32 angle_min
float32 angle_max
float32 angle_increment
float32 time_increment
float32 scan_time
float32 range_min
float32 range_max
float32[] ranges
float32[] intensities
IMU:惯性测量单元的方向、角速度和线性加速度
Header header
geometry_msgs/Quaternion orientation
float64[9] orientation_covariance
geometry_msgs/Vector3 angular_velocity
float64[9] angular_velocity_covariance
geometry_msgs/Vector3 linear_acceleration
float64[9] linear_acceleration_covariance
header: 用于包含时间戳等信息的标准 ROS 消息头。
orientation: 包含四元数表示的方向。
orientation_covariance: 一个长度为 9 的数组,表示方向协方差矩阵。
angular_velocity: 包含角速度信息的三维向量。
angular_velocity_covariance: 一个长度为 9 的数组,表示角速度协方差矩阵。
linear_acceleration: 包含线性加速度信息的三维向量。
linear_acceleration_covariance: 一个长度为 9 的数组,表示线性加速度协方差矩阵。
这些消息类型可以用于在 ROS 系统中传递从各种传感器获得的数据。节点可以发布这些消息,而其他节点则可以订阅它们以获取传感器数据。
1.3 ROS2几何相关消息包
ros2 interface package geometry_msgs
geometry_msgs/msg/Quaternion
geometry_msgs/msg/WrenchStamped
geometry_msgs/msg/Point32
geometry_msgs/msg/Accel
geometry_msgs/msg/Pose
geometry_msgs/msg/Vector3
geometry_msgs/msg/PoseArray
geometry_msgs/msg/PoseWithCovarianceStamped
geometry_msgs/msg/Polygon
geometry_msgs/msg/AccelWithCovarianceStamped
geometry_msgs/msg/AccelStamped
geometry_msgs/msg/PoseWithCovariance
geometry_msgs/msg/TransformStamped
geometry_msgs/msg/PointStamped
geometry_msgs/msg/PolygonStamped
geometry_msgs/msg/Vector3Stamped
geometry_msgs/msg/Inertia
geometry_msgs/msg/Wrench
geometry_msgs/msg/AccelWithCovariance
geometry_msgs/msg/Pose2D
geometry_msgs/msg/InertiaStamped
geometry_msgs/msg/PoseStamped
geometry_msgs/msg/QuaternionStamped
geometry_msgs/msg/Transform
geometry_msgs/msg/Twist
geometry_msgs/msg/TwistStamped
geometry_msgs/msg/TwistWithCovarianceStamped
geometry_msgs/msg/TwistWithCovariance
geometry_msgs/msg/Point
以下是一些常见的 geometry_msgs 中的消息类型:
Point: 代表三维空间中的点。
float64 x
float64 y
float64 z
Quaternion: 代表四元数,通常用于表示旋转。
float64 x
float64 y
float64 z
float64 w
Pose: 代表包含位置和方向的位姿。
Point position
Quaternion orientation
Transform: 代表变换矩阵。
Vector3 translation
Quaternion rotation
这些消息类型可以用于 ROS 中的各种应用,例如机器人运动、感知、导航等。通过使用这些消息,ROS 中的不同节点可以相互通信,共享几何信息,从而实现协同工作。
2 ROS2接口介绍
2.1 常用CLI命令
查看接口列表
ros2 interface list
查看某一个接口详细的内容
ros2 interface show std_msgs/msg/String
2.2 原始数据类型与包装类型
基本数据类型,每一个都可以在后面加上[]将其变成数组形式(从一个变成多个)
bool
byte
char
float32, float64
int8, uint8
int16, uint16
int32, uint32
int64, uint64
string
对数据类型进行剥洋葱
ros2 interface show sensor_msgs/msg/Image
终端显示如下:
# This message contains an uncompressed image
# (0, 0) is at top-left corner of imagestd_msgs/Header header # Header timestamp should be acquisition time of image
uint32 height # image height, that is, number of rows
uint32 width # image width, that is, number of columns
string encoding # Encoding of pixels -- channel meaning, ordering, size
uint8 is_bigendian # is this data bigendian?
uint32 step # Full row length in bytes
uint8[] data # actual matrix data, size is (step * rows)
对非基类的数据数据类型std_msgs/Header header进行剥洋葱
ros2 interface show std_msgs/msg/Header
终端显示如下:
# Two-integer timestamp that is expressed as seconds and nanoseconds.
builtin_interfaces/Time stamp
# Transform frame with which this data is associated.
string frame_id
对非基类的数据数据类型builtin_interfaces/Time进行剥洋葱
ros2 interface show builtin_interfaces/msg/Time
终端显示如下:
int32 sec
uint32 nanosec
最后只剩下基类了
3 自定义接口示例
说明:这部分笔者主要是将鱼香ROS2的示例成功跑通,具体流程如下:
示例链接:
【ROS2机器人入门到实战】ROS2接口介绍
【ROS2机器人入门到实战】自定义接口RCLPY实战
3.1 接口定义
1.创建接口功能包
ros2 pkg create alian_ros2_interfaces --build-type ament_cmake --dependencies rosidl_default_generators geometry_msgs
注意功能包类型必须为:ament_cmake
依赖rosidl_default_generators:用于生成ROS中的消息、服务和行为的代码。ROS中的消息和服务是通过IDL(接口定义语言)描述的,而rosidl_default_generators
则负责将这些IDL文件转换为各种编程语言的实际代码。
具体来说,rosidl_default_generators 支持将ROS接口定义语言(ROS
IDL)文件转换为C、C++等语言的源代码。这包括生成用于发布/订阅消息、提供/调用服务以及执行行为所需的代码。
2.编写接口脚本文件
接着创建文件夹(msg、srv)和文件(RobotPose.msg、RobotStatus.msg、MoveRobot.srv),如下图。
.
├── CMakeLists.txt
├── msg
│ ├── RobotPose.msg
│ └── RobotStatus.msg
├── package.xml
└── srv└── MoveRobot.srv
2 directories, 5 files
RobotPose.msg
uint32 STATUS_MOVEING = 1
uint32 STATUS_STOP = 2
uint32 status
geometry_msgs/Pose pose
RobotStatus.msg
uint32 STATUS_MOVEING = 1
uint32 STATUS_STOP = 1
uint32 status
float32 pose
MoveRobot.srv
# 前进后退的距离
float32 distance
---
# 当前的位置
float32 pose
3.设置配置文件
CMakeLists.txt
find_package(rosidl_default_generators REQUIRED)
find_package(geometry_msgs REQUIRED)
# 添加下面的内容
rosidl_generate_interfaces(${PROJECT_NAME}"msg/RobotPose.msg""msg/RobotStatus.msg""srv/MoveRobot.srv"DEPENDENCIES geometry_msgs
)
package.xml
<buildtool_depend>ament_cmake</buildtool_depend><depend>rosidl_default_generators</depend><depend>geometry_msgs</depend><member_of_group>rosidl_interface_packages</member_of_group> #添加这一行<test_depend>ament_lint_auto</test_depend><test_depend>ament_lint_common</test_depend>
4.编译接口功能包
colcon build --packages-select example_ros2_interfaces
3.2 自定义接口RCLPY
1.创建功能包和节点
cd colcon_ws/ # 自定义的工作空间
ros2 pkg create example_interfaces_rclpy --build-type ament_python --dependencies rclpy example_ros2_interfaces --destination-directory src --node-name example_interfaces_robot_02
touch src/example_interfaces_rclpy/example_interfaces_rclpy/example_interfaces_control_02.py
2. 编写节点脚本
example_interfaces_robot_02.py
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
from example_ros2_interfaces.msg import RobotStatus
import math
from time import sleep
from example_ros2_interfaces.srv import MoveRobotclass Robot():def __init__(self) -> None:self.current_pose_ = 0.0self.target_pose_ = 0.0self.status_ = RobotStatus.STATUS_STOPdef get_status(self):return self.status_def get_current_pose(self):return self.current_pose_def move_distance(self,distance):self.status_ = RobotStatus.STATUS_MOVEING # 更新状态为移动、self.target_pose_ += distance # 更新目标位置while math.fabs(self.target_pose_ - self.current_pose_) > 0.01:step = distance / math.fabs(distance) * math.fabs(self.target_pose_ - self.current_pose_) * 0.1 # 计算一步移动距离self.current_pose_ += step # 移动一步print(f"移动了:{step}当前位置:{self.current_pose_}")sleep(0.5) #休息0.5sself.status_ = RobotStatus.STATUS_STOP # 更新状态为停止return self.current_pose_ class ExampleInterfacesRobot02(Node):def __init__(self,name):super().__init__(name)self.get_logger().info("节点已启动:%s!" % name)self.robot = Robot()self.move_robot_server_ = self.create_service(MoveRobot,"move_robot", self.handle_move_robot) self.robot_status_publisher_ = self.create_publisher(RobotStatus,"robot_status", 10) self.publisher_timer_ = self.create_timer(0.5, self.publisher_timer_callback)def publisher_timer_callback(self):"""定时器回调发布数据函数"""msg = RobotStatus() #构造消息msg.status = self.robot.get_status()msg.pose = self.robot.get_current_pose()self.robot_status_publisher_.publish(msg) # 发布消息self.get_logger().info(f'发布了当前的状态:{msg.status} 位置:{msg.pose}')def handle_move_robot(self,request, response):self.robot.move_distance(request.distance)response.pose = self.robot.get_current_pose()return responsedef main(args=None):rclpy.init(args=args) # 初始化rclpynode = ExampleInterfacesRobot02("example_interfaces_robot_02") # 新建一个节点rclpy.spin(node) # 保持节点运行,检测是否收到退出指令(Ctrl+C)rclpy.shutdown() # 关闭rclpy
example_interfaces_control_02.py
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
from example_ros2_interfaces.msg import RobotStatus
from example_ros2_interfaces.srv import MoveRobotclass ExampleInterfacesControl02(Node):def __init__(self,name):super().__init__(name)self.get_logger().info("节点已启动:%s!" % name)self.client_ = self.create_client(MoveRobot,"move_robot") self.robot_status_subscribe_ = self.create_subscription(RobotStatus,"robot_status",self.robot_status_callback,10)def robot_status_callback(self,msg):self.get_logger().info(f"收到状态数据位置:{msg.pose} 状态:{msg.status}")def move_result_callback_(self, result_future):response = result_future.result()self.get_logger().info(f"收到返回结果:{response.pose}")def move_robot(self, distance):while rclpy.ok() and self.client_.wait_for_service(1)==False:self.get_logger().info(f"等待服务端上线....")request = MoveRobot.Request()request.distance = distanceself.get_logger().info(f"请求服务让机器人移动{distance}")self.client_.call_async(request).add_done_callback(self.move_result_callback_)def main(args=None):rclpy.init(args=args) # 初始化rclpynode = ExampleInterfacesControl02("example_interfaces_control_02") # 新建一个节点node.move_robot(5.0) #移动5米rclpy.spin(node) # 保持节点运行,检测是否收到退出指令(Ctrl+C)rclpy.shutdown() # 关闭rclpy
3.修改配置文件setup.py
entry_points={'console_scripts': ['example_interfaces_control_02 = example_interfaces_rclpy.example_interfaces_control_02:main','example_interfaces_robot_02 = example_interfaces_rclpy.example_interfaces_robot_02:main'],},
4.编译功能包+运行测试
# 新终端
colcon build --packages-up-to example_interfaces_rclpy
source install/setup.bash
ros2 run example_interfaces_rclpy example_interfaces_robot_02
# 新终端
source install/setup.bash
ros2 run example_interfaces_rclpy example_interfaces_control_02
上图则说明自定义接口测试成功!!!
相关文章:
【ROS2】MOMO的鱼香ROS2(五)ROS2入门篇——ROS2接口与自定义
ROS2接口与自定义 引言1 ROS2自带接口1.1 ROS2通用标准消息包1.2 ROS2传感器消息包1.3 ROS2几何相关消息包 2 ROS2接口介绍2.1 常用CLI命令2.2 原始数据类型与包装类型 3 自定义接口示例3.1 接口定义3.2 自定义接口RCLPY 引言 笔者跟着鱼香ROS的ROS2学习之旅 学习参考…...
python c语言 代码动态检查,python c语言语法分析
大家好,小编来为大家解答以下问题,python c语言 代码动态检查,python c语言语法分析,今天让我们一起来看看吧! Source code download: 本文相关源码 初学编程,应该学习哪一门编程语言,有不少人感…...
C++ DAY6 作业
1.用模板类写顺序表 #include <iostream>using namespace std;#define MAXSIZE 10 template <typename T> class Arr {T *data NULL;int len 0; public://构造函数Arr():data(new T){}Arr(T a,int len):data(new T(a)),len(len){}//析构函数~Arr(){delete data;}…...

华为服务器安装银河麒麟V10操作系统(IBMC安装)
iBMC是华为面向服务器全生命周期的服务器嵌入式管理系统。提供硬件状态监控、部署、节能、安全等系列管理工具,标准化接口构建服务器管理更加完善的生态系统。 服务器BMC IP:192.168.2.100 一、准备工作 1、确保本机和服务器BMC管理口在同一网络 2、银…...
macos下php 5.6 7.0 7.4 8.0 8.3 8.4全版本PHP开发环境安装方法
在macos中如果使用brew 官方默认的core tap 只可以安装官方最新的稳定版PHP, 如果想要安装 php 5.6 或者 php 8.4版本的PHP就需要使用第三方的tap , 这里分享一个比较全面的brew tap shivammathur/php 这个tap里面包含了从php5.6到最新版php8.4的所有可用最新版本PHP, 而且是同…...

Chatgpt为什么像打字机逐字输出?磨洋工,防止数据库被盗
在他后台的数据库里肯定是完整的结果,每次只给你一个单词一个单词的输送,一方面是为了耍酷,好像真的是一个人在那给你说话,另一方面也是防止第三方的抄袭者最快速度盗取采集偷走数据库。防止他们的服务器崩溃,可以多收几个月会员费。 都说搞…...

ubuntu 卸载桌面
要卸载Ubuntu上的桌面环境,您可以按照以下步骤进行操作: 登录到您的Ubuntu系统,并打开终端。 确认您当前正在使用的桌面环境。可以运行以下命令来查看已安装的桌面环境: s /usr/share/xsessions/ 根据您当前使用的桌面环境&…...

Linux文件fd剖析
学习之前,首先要认识什么是文件? 空文件也是要在内存中占据空间的,因为它还有属性数据。文件 属性 内容文件操作 对内容 对属性 或者对内容和属性的操作标定一个文件的时候,必须使用:路径文件名,文件具…...

VMWARE ESXi存储多路径策略修改
一、存储多路径介绍 VMware 路径选择插件 (PSP) 负责选择 I/O 请求的物理路径。插件是 VMware NMP 的子模块。NMP 根据设备类型为每个逻辑设备分配默认 PSP。每个PSP 启用并执行相应的路径选择策略。支持的路径选项有以下3种: VMW_PSP_MRU - 最近使用 它将选择在系…...

结构体详解
结构体: 一系列具有相同类型或不同类型的数据构成的数据集合,也叫结构 结构体可以用来封装一些属性来组成新的类型。 结构体的大小: 结构体的大小不是结构体元素单纯相加。内存对齐(若计算机使用32位字长的cpu,对32位的…...

前端开发个人简历范本(2024最新版-附模板)
前端开发工程师个人简历范本> 年龄 25岁 性别 男 毕业院校 XX大学 张三 学历 邮箱 leeywai-tools.cn 本科 专业 计算机科学与技术 个人梗概 拥有扎实的前端开发技能和丰富的实践经验 善于与团队合作,适应能力强,能够快速融入团队并贡献自…...

# 编程语言简史
编程语言简史 文章目录 编程语言简史1. python简史1. python发展历程 2. python适用领域1. 优点:2. 缺点:3. 应用领域: 2. java简史1. java发展历程2. java适用领域 3. C简史1. C发展历程2. C使用领域 4. C简史1. C发展历程2. C适用领域 5. C…...
SpringMVC学习与开发(三)
注:此为笔者学习狂神说SpringMVC的笔记,其中包含个人的笔记和理解,仅做学习笔记之用,更多详细资讯请出门左拐B站:狂神说!!! 10、ssm整合 问了一下ChatGPT SSM 是一个基于 Java 的开发框架整合,由 Spring、…...
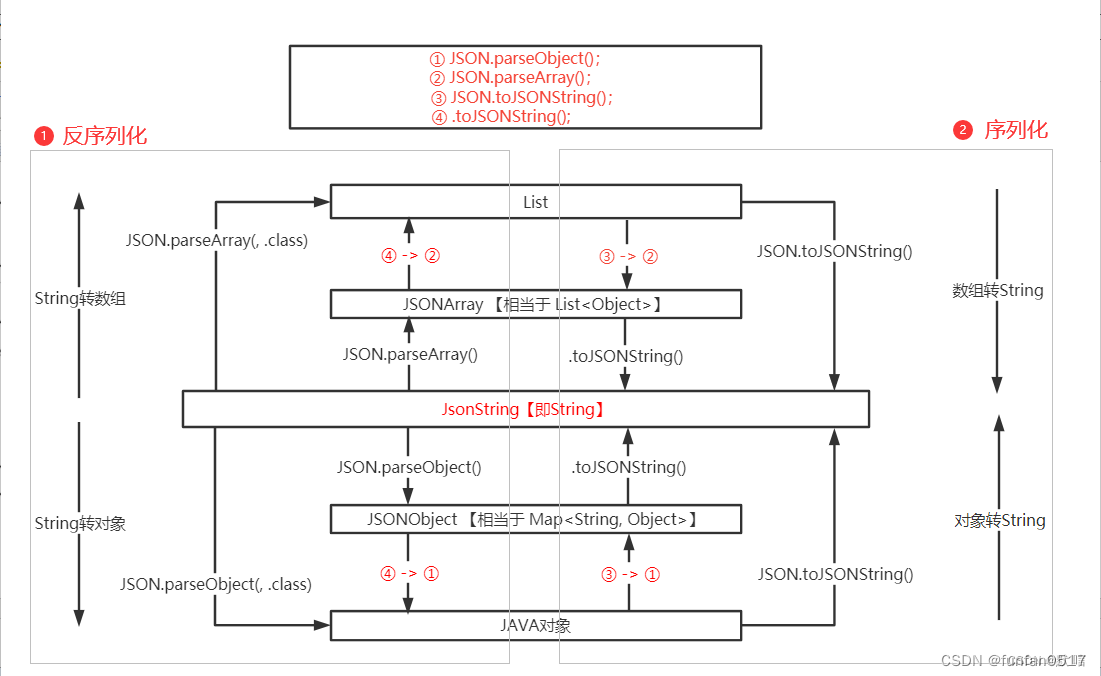
JAVA对象、List、Map和JSON之间的相互转换
JAVA对象、List、Map和JSON之间的相互转换 1.Java中对象和json互转2.Java中list和json互转3.Java中map和json互转 1.Java中对象和json互转 Object obj new Object(); String objJson JSONObject.toJSONString(obj);//java对象转json Object newObj JSONObject.parseObject(…...
图像分割-漫水填充法 floodFill
版权声明:本文为博主原创文章,转载请在显著位置标明本文出处以及作者网名,未经作者允许不得用于商业目的。 本文的C#版本请访问:图像分割-漫水填充法 floodFill (C#)-CSDN博客 FloodFill方法是一种图像处理算法&#…...
Python open函数详解:打开指定文件与 readline和readlines函数:按行读取文件
Python open函数详解:打开指定文件 掌握了各种操作目录字符串或目录的函数之后,接下来可以准备读写文件了。在进行文件读写之前,首先要打开文件。 Python 提供了一个内置的 open() 函数,该函数用于打开指定文件。 open() 函数的…...

Vue 生命周期有哪些?作用是什么?
什么是vue的生命周期 Vue 实例从开始创建、初始化数据、编译模板、挂载Dom和渲染、更新和渲染、卸载等一系列过程,这是 Vue 的生命周期 vue的生命周期的八个钩子函数 beforeCreat() 创建前 在new一个vue实例后,只有一些默认的生命周期钩子和默认事件&a…...

《Vue3 前端构建工具》 Vue-cli 与 Vite 创建项目的插件和配置对比
前言 2024 年 啦!Vue2 也于 2023.12.31 寿终正寝 ! 然而我的 Vue3 升级一再拖延(惭愧不已)~ 赶起来吧~ 今天用 vue-cli 和 vite 分别创建了 Vue3 项目,具体实现步骤见如下两篇。 《基于 Vue Cli4.x Vue3 TS styl…...

springboot(ssm中山社区医疗综合服务平台 医疗管理系统 Java系统
springboot(ssm中山社区医疗综合服务平台 医疗管理系统 Java系统 开发语言:Java 框架:ssm/springboot vue JDK版本:JDK1.8(或11) 服务器:tomcat 数据库:mysql 5.7(或8.0&#x…...
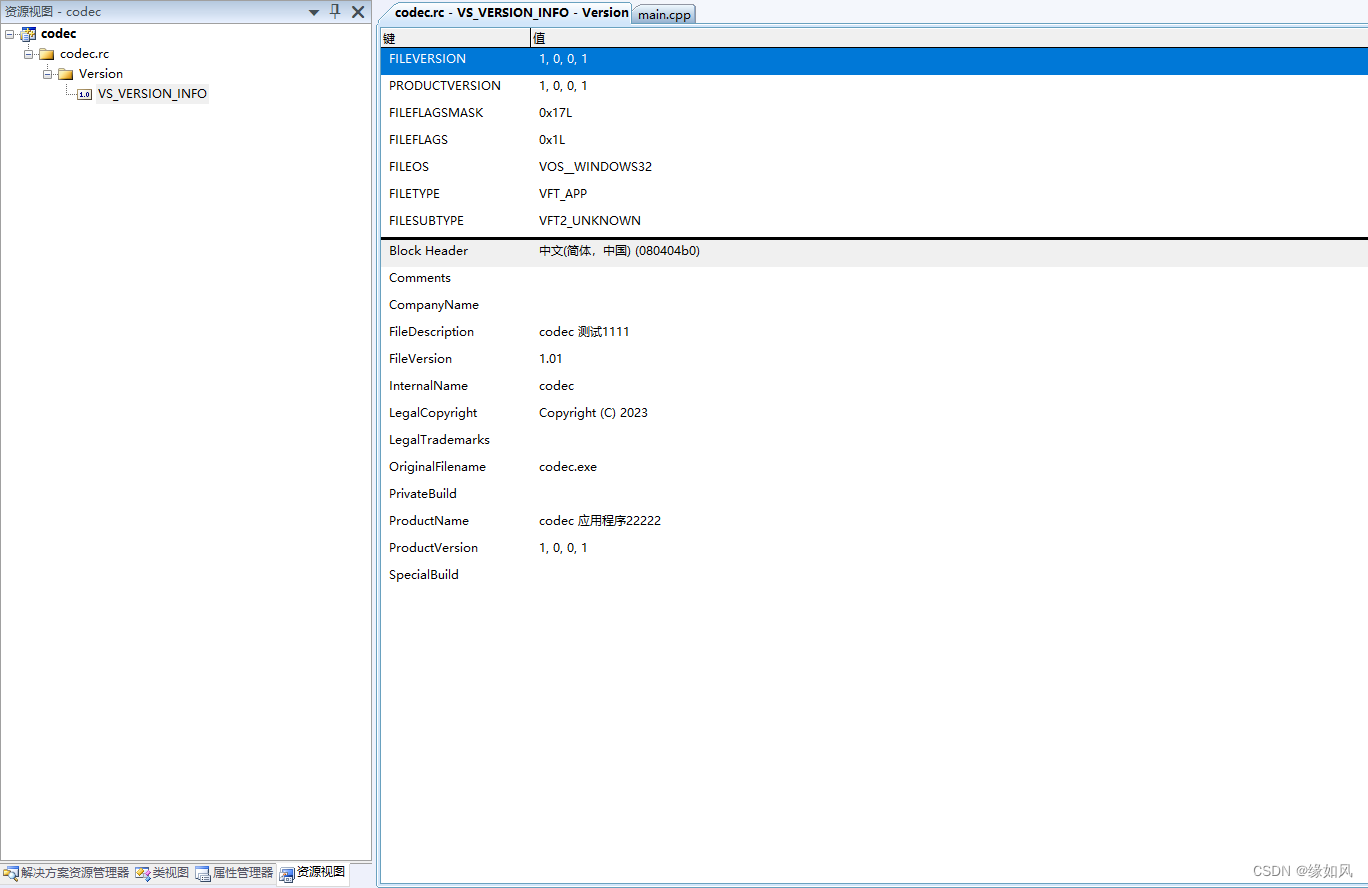
Qt编写的exe程序上添加程序信息
1、qtcreator编写 在pro文件中添加如下信息 # 版本信息 VERSION 4.0.2.666# 图标 RC_ICONS Images/MyApp.ico# 公司名称 QMAKE_TARGET_COMPANY "Digia"# 产品名称 QMAKE_TARGET_PRODUCT "Qt Creator"# 文件说明 QMAKE_TARGET_DESCRIPTION "Qt …...

低成本传感器动态校准:SenDaL框架原理与应用
1. 低成本传感器校准的行业痛点与SenDaL解决方案在智能家居和工业物联网领域,我们经常面临一个尴尬的境地:高精度传感器价格昂贵难以大规模部署,而低成本传感器的数据质量又令人担忧。以PM2.5监测为例,专业级β射线传感器的价格可…...

基于Nuxt 4与Shadcn/ui的现代全栈仪表板开发实战
1. 项目概述:一个现代全栈仪表板的技术栈选择 最近在做一个内部管理后台,需要快速搭建一个既美观又功能齐全的仪表板。我的核心需求很明确:开发要快、代码质量要高、用户体验要好,并且要能轻松应对多语言场景。在评估了市面上各种…...

基于OpenAI API与社交平台集成的智能聊天机器人构建指南
1. 项目概述:一个整合社交与AI的自动化工具箱最近在GitHub上看到一个挺有意思的项目,叫“Whatsapp_Instagram_Messanger_ChatGPT_OpenAI”。光看这个标题,你大概就能猜到它的野心不小——它试图把WhatsApp、Instagram、Messenger这几个主流社…...

利用 JiuwenClaw AgentTeam 打造自动化研发团队
利用 JiuwenClaw AgentTeam 打造自动化研发团队 本文介绍如何通过 JiuwenClaw AgentTeam 构建自动化研发团队,实现字幕软件开发、AtomGit Issue/PR 智能处理与飞书文档同步。 目录 JiuwenClaw 平台概述 系统架构预置智能体类型 什么是 AgentTeams飞书群中添加机器人…...

iCircuit:iPad上的电子电路仿真神器,从原理到实践全解析
1. 项目概述与核心价值 最近和一位老朋友Alvin聊天,他是一位资深的硬件工程师,我们曾一起合作过一些项目。他兴奋地给我发来一封邮件,强烈推荐了一款他正在使用的iPad应用——iCircuit。这让我立刻提起了兴趣,因为在移动设备上进行…...

Yarbo 机器人割草机调整策略:远程后门访问功能将设为可选安装
Yarbo 调整远程后门访问功能,设为可选安装Yarbo 原有的远程后门访问功能可能使不法分子通过互联网对机器人进行重新编程。如今,该公司计划彻底移除这一功能,联合创始人肯尼斯科尔曼承诺,客户将能够决定是否一开始就安装该功能&…...

NExT-GPT:从多模态对齐到任意模态生成的架构与实战
1. 项目概述:从“多模态”到“任意模态”的进化 如果你在过去一年里关注过AI领域,一定对“多模态大模型”这个词不陌生。从GPT-4V到Gemini,主流模型都在努力让AI能同时理解文本和图像。但不知道你有没有想过一个问题:为什么我们和…...

AI 驱动单元测试生成:智能优先级与自动化验证实践
1. 项目概述如果你和我一样,长期在维护一个中大型的 TypeScript 项目,那么“补单元测试”这件事,大概率是你技术债清单上那个永远在滚动、却很少被真正划掉的任务。手动写测试枯燥耗时,尤其是面对那些遗留的、逻辑复杂的业务函数时…...
AITranslate:本地化AI翻译工作流框架,构建可编程翻译管道
1. 项目概述与核心价值最近在折腾一个挺有意思的项目,叫AITranslate。这名字一看就知道,它想用AI来干翻译的活儿。但说实话,现在市面上翻译工具多如牛毛,从老牌的谷歌翻译、DeepL,到各种大厂出的AI翻译插件,…...

DocX入门指南:如何在不安装Word的情况下快速创建第一个Word文档
DocX入门指南:如何在不安装Word的情况下快速创建第一个Word文档 【免费下载链接】DocX Fast and easy to use .NET library that creates or modifies Microsoft Word files without installing Word. 项目地址: https://gitcode.com/gh_mirrors/doc/DocX Do…...