双向链表+循环链表
循环链表+双向链表
循环链表
循环链表是头尾相接的链表(即表中最后一个结点的指针域指向头结点,整个链表形成一个环)(circular linked list)

**优点:**从表中任一结点出发均可访问全部结点
循环链表与单链表的主要差别当链表遍历时,判别当前指针p是否指向表尾结点的终止条件不同。在单链表中,判别条件为p!=NULL或p->next=NULL,而循环单链表的判别条件为p!=L或p->next!=L




#include<stdio.h>
#include<stdlib.h>typedef struct Lnode {int data;struct Lnode* next;
}Lnode,*LinkList;/*初始化循环单链表*/
Lnode* InitList(LinkList L)
{L = (Lnode*)malloc(sizeof(Lnode));if (L == NULL){//提示分配失败}L->next = L;
}//判断循环单链表是否为空 (终止条件为p或p->next是否等于头指针)
int Isempty(LinkList L)
{if (L->next == L){return 1;}else {return -1;}
}//判断结点p是否为循环单链表的表尾结点
int isTail(LinkList L, Lnode* p)
{if (p->next == L){return 1;}else {return -1;}
}
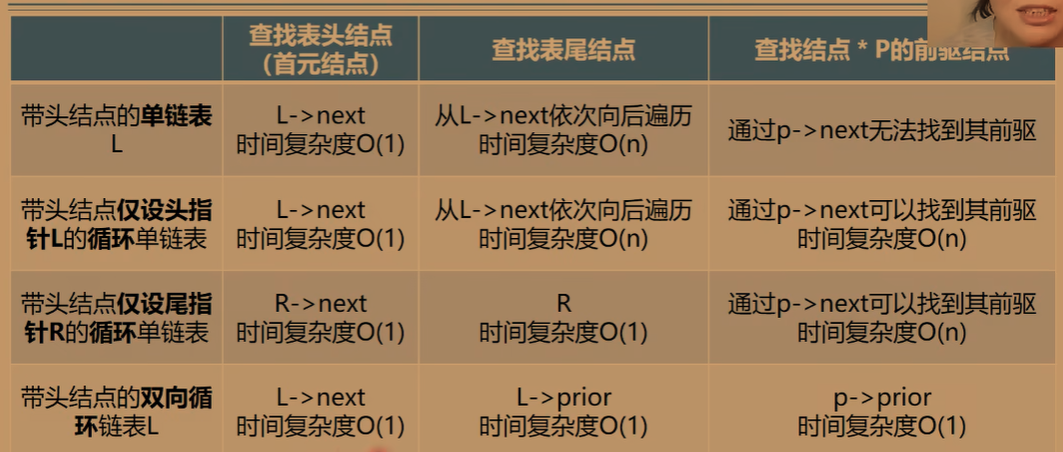
单链表和循环单链表的比较:
**单链表:**从一个结点出发只能找到该结点后续的各个结点;对链表的操作大多都在头部或者尾部;设立头指针,从头结点找到尾部的时间复杂度=O(n),即对表尾进行操作需要O(n)的时间复杂度;
**循环单链表:**从一个结点出发,可以找到其他任何一个结点;设立尾指针,从尾部找到头部的时间复杂度为O(1),即对表头和表尾进行操作都只需要O(1)的时间复杂度;
双向链表

为了克服单链表的这一缺点,老科学家们设计了双向链表(double linked list)是在单链表的每个结点中再设计一个指向其前驱结点的指针域。所以在双向链表中的结点有两个指针域,一个指向直接后继,另一个指向直接前驱。这样链表中有两个不同方向的链。


与单循环链表类似双向链表也可以有循环表(首尾相接形成"环"[2个])
让头结点的前驱指针指向链表的最后一个结点
最后一个结点的后继指针指向头结点

双向链表结构有对称性(设指针p指向某一个结点)
p->prior->next=p=p->next->prior(前进一步后退一步相当于原地踏步)
在双向链表中有些操作(ListLength,GetElemment等因为只涉及一个方向的指针他们的算法与线性表的相同)但在插入和删除需要修改两个方向上的指针两者的算法复杂度均为O(n)
双向链表的插入


单链表只需修改两个指针,而双向链表修改四个指针
算法复杂度O(n)

总结
链式存储结构的优点:
-
结点空间可以动态申请和释放;
-
数据元素的逻辑次序靠结点的指针来指示,插入和删除不需要移动元素。
链式存储结构的缺点:
-
存储密度小,每个结点的指针域需额外占用存储空间。当每个结点的数据域所占的字节数不多时,指针域所占的存储空间的比重显得很大。
-
存储密度是指结点数据本身占用的空间**/结点占用的空间总量**

链式存储结构是非随机存取结构。对任一结点的操作都要从头指针依指针链查找到该结点,这增加了算法的复杂度。(对某个结点操作一般要先找到该结点)

代码总结
双向链表
#include<stdio.h>
#include<stdlib.h>typedef struct Lnode {int data; //数据域struct Lnode* prior, * next; //前驱和后继指针
}DLnode,*DLinkList;DLnode* InitDLinkList(DLinkList L)
{L = (DLnode*)malloc(sizeof(DLnode));if (L == NULL){return -1; //分配失败}else{L->prior = NULL; //头指针的前驱指针永远指向NULLL->next = NULL; }return L;
}void InsertNextDLnode(DLnode* p, DLnode* s) { //将结点 *s 插入到结点 *p之后if (p == NULL || s == NULL) //非法参数return;s->next = p->next;if (p->next != NULL) //p不是最后一个结点=p有后继结点 p->next->prior = s;s->prior = p;p->next = s;return;
}
/*
按位序插入操作:
思路:从头结点开始,找到某个位序的前驱结点,对该前驱结点执行后插操作;
前插操作:
思路:找到给定结点的前驱结点,再对该前驱结点执行后插操作;*//*删除*/
/*删除p结点的后继结点*/
void DeleteDLnode_next(DLnode* p)
{if (p == NULL) {return;}DLnode* q = p->next; //找到p的后继结点if (q == NULL) {return;}p->next = q->next;if (q->next != NULL) //q不是最后一个结点{q->next->prior = p;}free(q);
}/*销毁一个双向链表*/
void DestotyDLinkList(DLinkList L)
{//循环释放各个数据结点while (L->next != NULL){DeleteDLnode_next(L); //删除头结点的后继节点free(L); //释放头结点L = NULL;}
}/*双链表的遍历操作——前向遍历*/
while (p != NULL)
{//对接点p做相应处理,并打印p = p->prior;
}/*双链表的遍历操作——后向遍历*/
while (p != NULL) {//对结点p做相应处理,eg打印p = p->next;
}双向循环链表
#include<stdio.h>
#include<stdlib.h>typedef struct Lnode {int data; //数据域struct Lnode* prior, * next; //前驱和后继指针
}DLnode, * DLinkList;/*初始化空的循环双向链表*/
void InitDLinkList(DLinkList L)
{L=(DLnode*)malloc(sizeof(DLnode));if (L == NULL){//提示空间不足,分配失败return;}L->prior = L; //头结点的前驱&后继指针都指向头结点L->next = L;
}//判断循环双向链表是否为空
int IsEmpty(DLinkList L)
{if (L->next == L){return 1;}else return -1;
}//判断p结点是否为循环双向链表的表尾结点
int IsTail(DLinkList L, DLnode* p) {if (p->next == L){return 1;}else return -1;
}//双向循环链表的插入
void InsertNextDLnode(DLnode* p, DLnode* s)
{s->next = p->next;p->next->prior = s;s->prior = p;p->next = s;
}//双向链表的删除操作
void DeleteDLnode(DLnode* p)
{if (p == NULL) {return;}DLnode* q = p->next; //找到p的后继结点if (q == NULL) {return;}p->next = q->next;if (q->next != NULL) //q不是最后一个结点{q->next->prior = p;}free(q);
}
相关文章:
双向链表+循环链表
循环链表双向链表 循环链表 循环链表是头尾相接的链表(即表中最后一个结点的指针域指向头结点,整个链表形成一个环)(circular linked list) **优点:**从表中任一结点出发均可访问全部结点 循环链表与单链表的主要差别当链表遍历时,判别当前…...

Java程序的逻辑控制
一、顺序结构 顺序结构比较简单,如果我们按照代码书写的顺序一行一行执行,将会是这样的: System.out.println("aaa"); System.out.println("bbb"); System.out.println("ccc"); // 运行结果 aaa bbb ccc 如…...

BUCTOJ - 2023上半年ACM蓝桥杯每周训练题-1-A~K题C++Python双语版
文章目录BUCTOJ - 2023上半年ACM&蓝桥杯每周训练题-1-A~K题CPython双语版前言问题 A: 1.2 神奇兔子数列题目描述输入输出解题思路AC代码CPython问题 B: 1.3 马克思手稿中的数学题题目描述输入输出解题思路AC代码CPython问题 C: 1.4 爱因斯坦的阶梯题目描述输入输出解题思路…...
存储的本质-学习笔记
1 经典案例 1.1 数据的流动 一条用户注册数据流动到后端服务器,持久化保存到数据库中。 1.2 数据的持久化 校验数据的合法性修改内存写入存储介质2 存储&数据库简介 2.1 存储系统特点 性能敏感、容易受硬件影响、存储系统代码既“简单”又“复杂”。 2.2 数…...

新一代骨传导机皇重磅发布:南卡Neo骨传导运动耳机,性能全面提升
近日,中国最强骨传导品牌NANK南卡发布了最新一代骨传导耳机——南卡Neo骨传导耳机!该款耳机与运动专业性更强的南卡runner Pro4略微不同,其主要定位于轻运动风格,所以这款耳机的音质和佩戴舒适度达到了令人咂舌的地步!…...

Hbase Schema设计与数据模型操作
一、Hbase Schema设计 1,Schema 创建 使用 Apache HBase Shell 或使用 Java API 中的 Admin 来创建或更新 HBase 模式。 Configuration config HBaseConfiguration.create(); Admin admin new Admin(conf); TableName table TableName.valueOf("myTable&…...

微电影广告有哪些传播优势?
微电影广告是在基于微电影的模式下发展而来的,是伴随着当下快节奏、碎片化的生活方式而诞生的新兴广告表现形式。微电影广告凭借其具备的独特传播优势以及时代特征成为广大企业主塑造企业品牌形象的主要方式。那么,微电影广告究竟有哪些传播优势…...

html基础(列表(ul、ol、dl)、表格table、表单(input、button、label)、div和span、空格nbsp)
1无序列表<ul>和有序列表<ol>1.1无序列表<ul><!-- 无序列表 --><ul><li>吃饭</li><li>睡觉</li><li>打豆豆</li></ul>1.2有序列表<ol><!-- 有序列表 --><ol><li>吃饭</li…...

uniapp常用标签
view ~~ 视图容器类似于传统html中的div,用于包裹各种元素内容<view><text>hh</text> </view>scroll-view ~~可滚动视图区域scroll-x 允许横向滚动scroll-y 允许纵向滚动scroll-top 设置竖向滚动条位置,可以一键回到顶部refresh…...

《数字中国建设整体布局规划》发布,推进IPv6部署和应用是重点
近日,中共中央、国务院印发了《数字中国建设整体布局规划》(以下简称《规划》),并发出通知,要求各地区各部门结合实际认真贯彻落实。 《规划》指出,建设数字中国是数字时代推进中国式现代化的重要引擎&…...
【Java】 异步调用实践
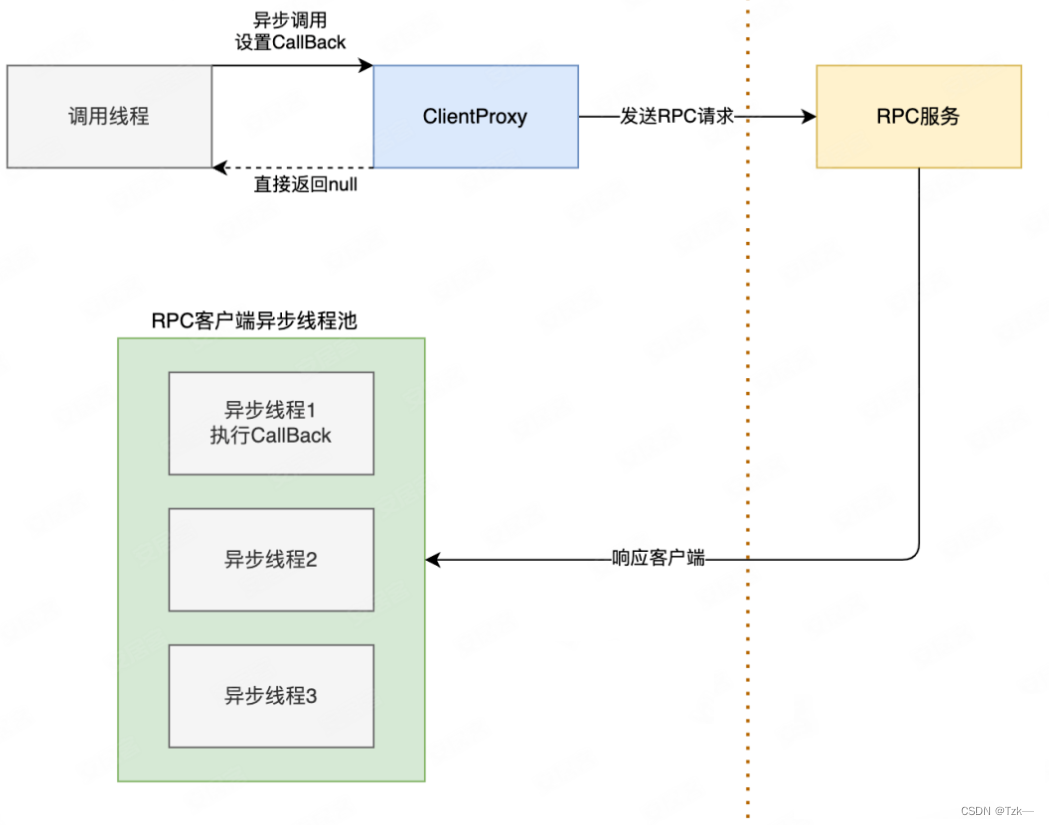
本文要点: 为什么需要异步调用CompletableFuture 基本使用RPC 异步调用HTTP 异步调用编排 CompletableFuture 提高吞吐量BIO 模型 当用户进程调用了recvfrom 这个系统调用,kernel 就开始了 IO 的第一个阶段:准备数据。对于 network io 来说…...

园区智慧能源管理系统
实现对园区的用能情况实时、全方位监测,重点设备进行数据自动采集并智能统计、分析,根据需要绘制各种趋势曲线、能源流向图和分析报表。将物联网、大数据与全过程能源管理相融合,提供全生命周期的数字化用能服务,实现用能的精细化…...

基于卷积神经网络CNN的分类研究,基于卷积神经网络的手写体识别
目录 背影 卷积神经网络CNN的原理 卷积神经网络CNN的定义 卷积神经网络CNN的神经元 卷积神经网络CNN的激活函数 卷积神经网络CNN的传递函数 卷积神经网络CNN手写体识别 基本结构 主要参数 MATALB代码 结果图 展望 背影 现在生活,各种人工智能都要求对图像拥有识别…...

mybatis的增删改查运用
目录 一、总览图 二、运用 一、总览图 代码总览图 数据库总览图 二、运用 数据库的一张表对应一个封装类,一个mapper接口,一个mapper.xml文件, 一个实现类。表中的增删改查都在里面编写 但是配置xml文件整个数据库只要一个就好了 1.…...

centos8安装docker运行java文件
本文由个人总结,如需转载使用请标明原著及原文地址 这里是基于我前一篇搭的centos8服务器做的,如果yum baseos源或appstream源有问题可以去看看前一篇 https://blog.csdn.net/qq_36911145/article/details/129263830 1.安装docker 1.1配置docker yum…...
Docker容器化部署.net core API
1.为API集成Docker环境。(VS自带,傻瓜式操作) 1.1 点击项目,右键,添加,选择Docker支持 1.2 找到项目根目录中的Dockerfile文件,这是VS刚刚帮我们自动生成的。进入和做如图标红地方修改。 把文…...

springcloud 服务调用feign、熔断hystrix、网关gateway
回归cloud的学习,对于springcloud的架构与原理以及性能的分析我们都在之前的文章里写过:springcloud架构的认识我们之前测试过eureka服务注册功能,它能很好的保存服务之间的通讯关系,是维系微服务通讯网之间的电话本,同…...

《C++ Primer》 第十二章 动态内存
《C Primer》 第十二章 动态内存 动态内存与智能指针 shared_ptr允许多个指针指向同一个对象;unique_ptr则“独占”所指向的对象,weak_ptr指向shared_ptr所管理的对象。这三种类型都定义在memory头文件中。 shared_ptr类:默认初始化的智能…...

多个关键字用or、and、包含、不包含动态拼接为正则表达式和SQL查询条件
目录前言校验思路1、存储方式2、实现图一实现图二实现结果最后前言 不知道大家有没有做过这种需求:在某字符串中,根据多个关键字去判断这串字符串是否满足条件。如下图: 亦或是 如果说要根据图二的关键字去数据库中查询符合条件的数据&a…...

初始Linux操作系统
个人简介:云计算网络运维专业人员,了解运维知识,掌握TCP/IP协议,每天分享网络运维知识与技能。座右铭:海不辞水,故能成其大;山不辞石,故能成其高。个人主页:小李会科技的…...

ImageGlass终极指南:5分钟掌握这款轻量级图片查看器的完整使用技巧
ImageGlass终极指南:5分钟掌握这款轻量级图片查看器的完整使用技巧 【免费下载链接】ImageGlass 🏞 A lightweight, versatile image viewer 项目地址: https://gitcode.com/gh_mirrors/im/ImageGlass ImageGlass是一款专为Windows系统设计的轻量…...

STM32F103RCT6驱动ADS1115:从IIC时序到电压换算的保姆级避坑指南
STM32F103RCT6驱动ADS1115:从IIC时序到电压换算的保姆级避坑指南 在嵌入式开发中,高精度ADC采集往往是项目成败的关键。当STM32F103RCT6遇上16位精度的ADS1115,理论上应该获得令人满意的模拟信号采集效果,但实际调试过程中&#x…...

从井下挖煤到改变高考:他用选择题终结“人情分“
1983年之前,中国的高考试卷上还没有选择题。那年春天,北京师范大学心理学教授郑日昌带着团队做了一项调查。他们从全国随机抽取了5套高考试卷,复印后分发给不同省市的评卷教师打分。结果出来后,所有人都傻眼了:同一份理…...
)
【仅限首批200家认证企业】SITS 2026 Embedding性能基线报告(含Top5厂商真实benchmark对比)
更多请点击: https://intelliparadigm.com 第一章:AI原生Embedding优化:SITS 2026语义搜索性能提升技巧 在 SITS 2026(Semantic Indexing & Text Search)基准测试中,AI 原生 Embedding 模型的推理延迟…...

从盒模型到像素级掌控:QMenu样式设置的底层逻辑与实战
1. 为什么简单的width/height设置对QMenu无效? 很多Qt开发者第一次尝试用QSS设置QMenu尺寸时都会遇到这个困惑:明明在CSS中写width:110px; height:170px;,运行时却完全看不到效果。这其实是因为QMenu的尺寸计算机制与传统QWidget有本质区别。…...

通过 curl 命令直接测试 Taotoken 聊天接口的快速验证方法
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过 curl 命令直接测试 Taotoken 聊天接口的快速验证方法 在接入大模型服务时,有时我们希望在无特定编程语言 SDK 的环…...

终极指南:3步掌握《塞尔达传说:旷野之息》存档编辑器,打造完美游戏体验
终极指南:3步掌握《塞尔达传说:旷野之息》存档编辑器,打造完美游戏体验 【免费下载链接】BOTW-Save-Editor-GUI A Work in Progress Save Editor for BOTW 项目地址: https://gitcode.com/gh_mirrors/bo/BOTW-Save-Editor-GUI 你是否曾…...
)
Win10/Win11下易语言调用大漠插件后台绑定游戏窗口的保姆级教程(含管理员权限避坑)
Win10/Win11下易语言调用大漠插件后台绑定游戏窗口的实战指南 最近在帮朋友调试一个游戏自动化工具时,遇到了一个棘手的问题:在Win11系统上,使用易语言调用大漠插件进行后台窗口绑定总是失败。经过三天三夜的调试和测试,终于摸清了…...

HsMod炉石传说插件终极指南:55项功能完全解锁
HsMod炉石传说插件终极指南:55项功能完全解锁 【免费下载链接】HsMod Hearthstone Modification Based on BepInEx 项目地址: https://gitcode.com/GitHub_Trending/hs/HsMod HsMod是基于BepInEx框架开发的炉石传说多功能增强插件,为玩家提供游戏…...

Python-TGPT:统一接口调用多AI模型,快速构建智能应用
1. 项目概述:一个让Python与AI对话的轻量级桥梁 如果你正在寻找一个能让你在Python脚本里快速、简单地调用主流大语言模型(LLM)API的工具,而不是被各种官方SDK复杂的初始化、错误处理和流式输出搞得头大,那么 Simatw…...