ros2创建一个工程
第一步:创建src目录
$ mkdir ros2-demo
$ cd ros2-demo/
$ mkdir src
$ cd src/第二步:创建功能包
cd src$
ros2 pkg create --build-type ament_cmake ros2_demo --dependencies rclcpp std_msgsros2 pkg create --build-type ament_python learning_pkg_python # Pythonros2命令中:
pkg:表示功能包相关的功能;
create:表示创建功能包;
build-type:表示新创建的功能包是C++还是Python的,如果使用C++或者C,那这里就跟ament_cmake,如果使用Python,就跟ament_python
package_name:新建功能包的名字。比如在终端中分别创建C++和Python版本的功能包:
第三步:确定功能包
c++/c功能包
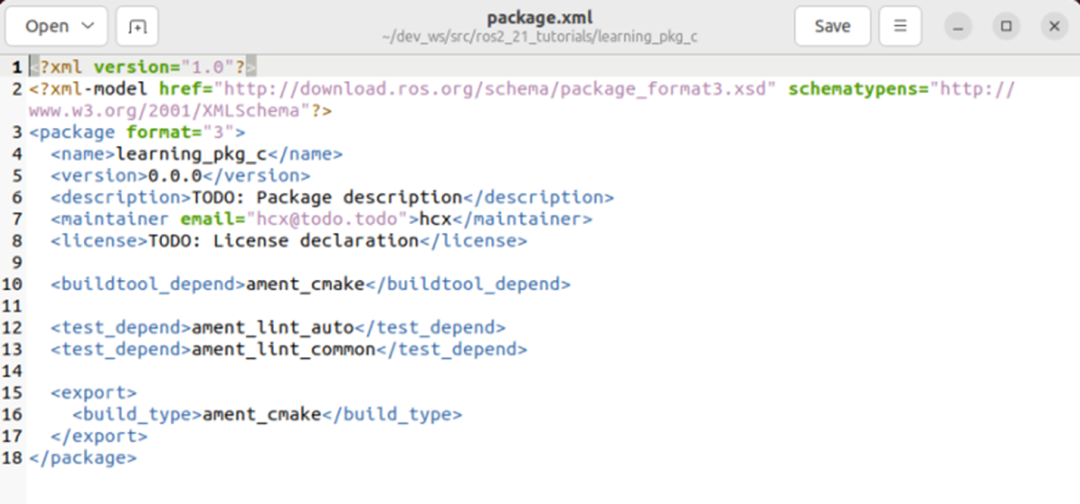
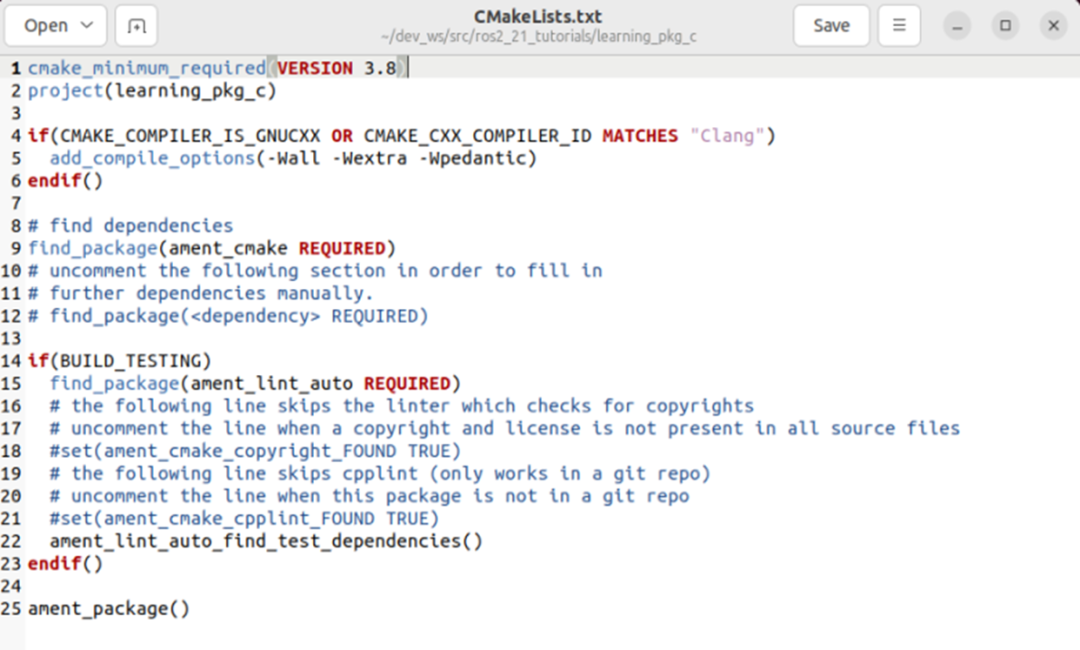
首先看下C++类型的功能包,其中必然存在两个文件:package.xml和CMakerLists.txt。

package.xml文件的主要内容如下,包含功能包的版权描述,和各种依赖的声明。
CMakeLists.txt文件是编译规则,C++代码需要编译才能运行,所以必须要在该文件中设置如何编译,使用CMake语法。
2.python功能包
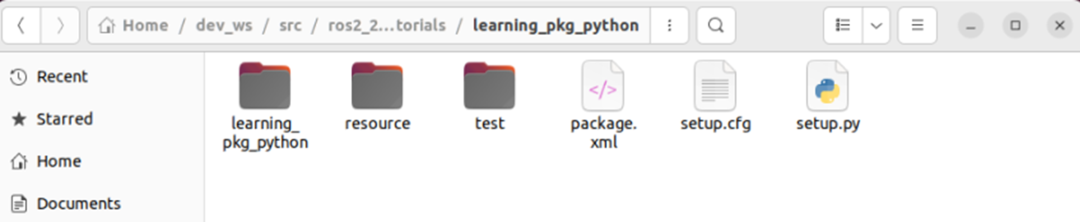
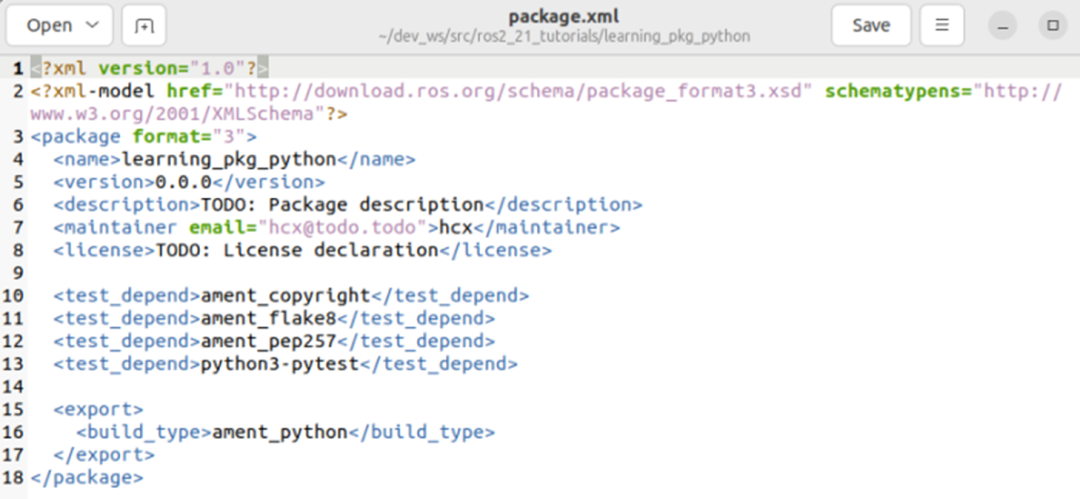
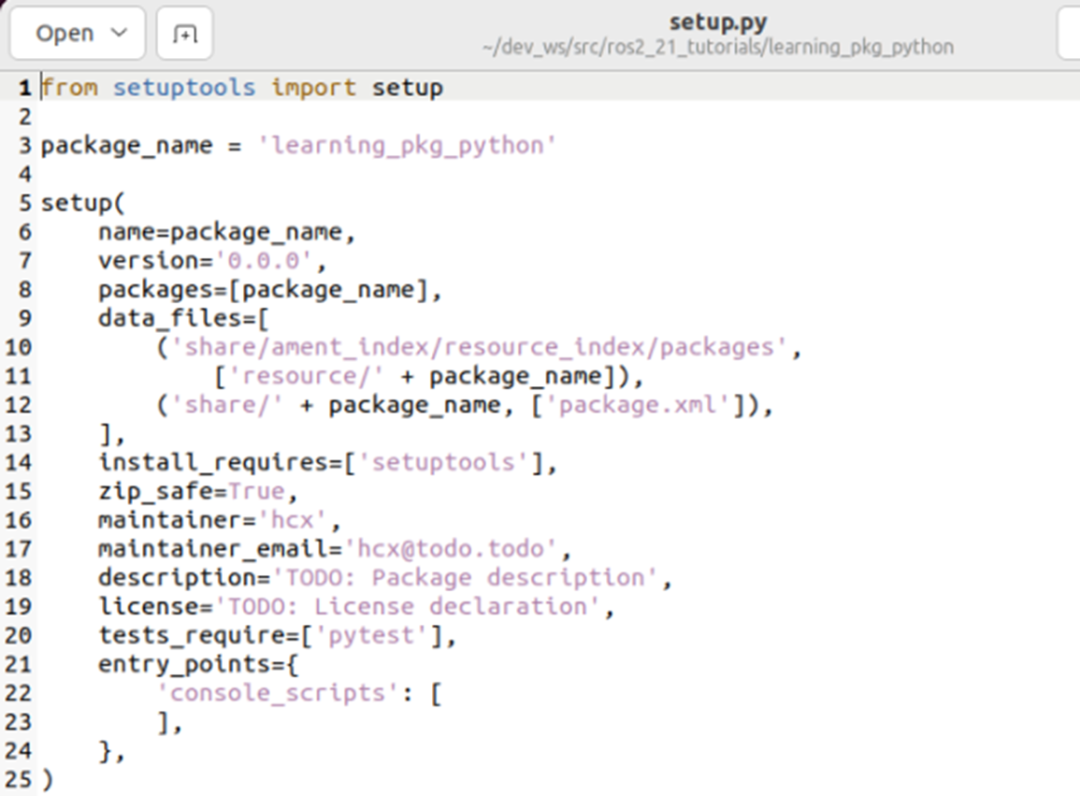
C++功能包需要将源码编译成可执行文件,但是Python语言是解析型的,不需要编译,所以会有一些不同,但也会有这两个文件:package.xml和setup.py。
package.xml文件的主要内容和C++版本功能包一样,包含功能包的版权描述,和各种依赖的声明。
setup.py文件里边也包含一些版权信息,除此之外,还有“entry_points”配置的程序入口。
第四步:创建节点文件
cd ~/ros2-demo/src/ros2_demo
sudo gedit sub_node.cppsub_node.cpp代码具体如下:
#include <chrono>
#include "rclcpp/rclcpp.hpp"
using namespace std::chrono_literals;
/* This example creates a subclass of Node and uses a fancy C++11 lambda* function to shorten the timer syntax, at the expense of making the* code somewhat more difficult to understand at first glance if you are* unaccustomed to C++11 lambda expressions. */
class MinimalTimer : public rclcpp::Node
{
public:MinimalTimer(): Node("minimal_timer"){auto timer_callback = [this]() -> void { RCLCPP_INFO(this->get_logger(), "Hello, world!") };timer_ = create_wall_timer(500ms, timer_callback);}
private:rclcpp::TimerBase::SharedPtr timer_;
};
int main(int argc, char * argv[])
{rclcpp::init(argc, argv);rclcpp::spin(std::make_shared<MinimalTimer>());rclcpp::shutdown();return 0;
}第五步:修改CMakeLists.txt和package.xml
修改CMakeLists.txt;
cd ~/ros2-demo/src/ros2_demo
sudo gedit CMakeLists.txt在 find_package(ament_cmake REQUIRED)下面添加
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)添加可执行文件的名字为ros2_demo
add_executable(ros2_demo src/sub_node.cpp)
ament_target_dependencies(ros2_demo rclcpp std_msgs)添加 install(TARGETS…) 把可执行文件安装到install去
install(TARGETSros2_demoDESTINATION lib/${PROJECT_NAME})第六步:编译和运行
编译节点
cd ~/ros2-demo
colcon build --packages-select ros2_demo
source install/setup.bash运行节点
ros2 run ros2_demo sub_node相关文章:
ros2创建一个工程
第一步:创建src目录 $ mkdir ros2-demo $ cd ros2-demo/ $ mkdir src $ cd src/第二步:创建功能包cd src$ ros2 pkg create --build-type ament_cmake ros2_demo --dependencies rclcpp std_msgsros2 pkg create --build-type ament_python learning_pkg…...

【力扣】stack容器的探索之有效的括号
作者:狮子也疯狂 专栏:《算法详解》 愿你生如夏花之绚烂,幸运永远与你相伴,疯狂常在。 目录一. 🦁 Stack容器的来历1.1 操作栈的方法二. 🦁 Stack的使用2.1 题目2.2 分析2.3 详细算法实现2.4 力扣AC截图三…...

【Elsevier出版社】中科院2区,SCIEEI 双检,已有发表案例,3个月左右录用
1区智能传感器类SCIE&EI 【期刊简介】IF:5.0-6.0,JCR1区,中科院2区,SCI&EI 双检,正刊 【参考周期】3个月左右录用 【截稿日期】2023.5.30 【征稿领域】有关人工智能与传感器的相关研究均可 包括但不限于&#…...

基于明道云平台重建医院管理流程
一、龙华区医疗信息化建设情况 首先,给大家介绍一下龙华区医疗信息化建设的情况,龙华区位于深圳市的中部,目前下属3家公立医院,2家公共卫生机构。2017年,龙华区提出了建设智慧龙华总体框架方案,龙华区卫生…...
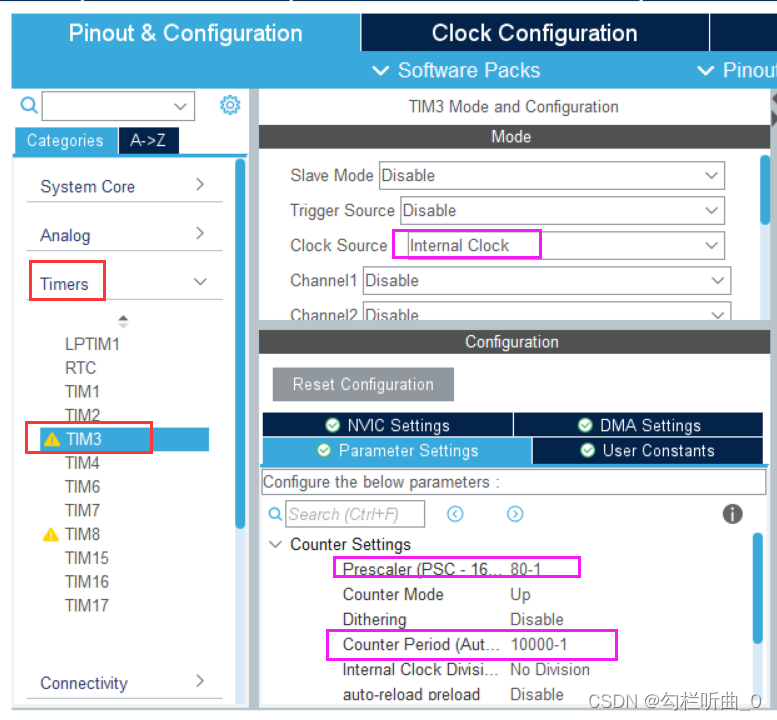
【蓝桥杯嵌入式】STM32定时器的配置,解析预分频系数和重装载值与时钟频率的关系
🎊【蓝桥杯嵌入式】专题正在持续更新中,原理图解析✨,各模块分析✨以及历年真题讲解✨都在这儿哦,欢迎大家前往订阅本专题,获取更多详细信息哦🎏🎏🎏 🪔本系列专栏 - 蓝…...
ChatGPT API 低价上线,开发者可以人手一个了?
千呼万唤,ChatGPT API来了! 不仅首发,价格居然还有惊喜,0.002美元/每1000 token,并将价格降低90%,直接打了1折。OpenAI官方还表示,gpt-3.5-turbo目前的版本代号是gpt-3.5-turbo-0301࿰…...

品牌营销策略 | 科学经营合作伙伴关系的5个要素
在管理众多的合作伙伴项目时,企业会遇到很多的问题,比如,数据信息分散凌乱、手动操作繁琐重复和处理环节粗放等。这将耗费公司大量的人力物力,严重影响大数据的综合分析和利用。因此,企业要科学管理好企业的合作伙伴关…...

【剑指offer-C++】JZ20:表示数值的字符串
【剑指offer-C】JZ20:表示数值的字符串题目描述解题思路题目描述 描述:请实现一个函数用来判断字符串str是否表示数值(包括科学计数法的数字,小数和整数)。 科学计数法的数字(按顺序)可以分成以下几个部分…...

【NLP相关】深度学习领域不同编程IDE对比
❤️觉得内容不错的话,欢迎点赞收藏加关注😊😊😊,后续会继续输入更多优质内容❤️👉有问题欢迎大家加关注私戳或者评论(包括但不限于NLP算法相关,linux学习相关,读研读博…...

定制ubuntu的docker镜像
ssh登录jdkmavenvimpingcurlFROM ubuntu:22.04RUN apt-get updateRUN apt-get install -y \vim \inetutils-ping \openssh-server \curl \openjdk-8-jdk \mavenRUN mkdir /var/run/sshdRUN echo root:root |chpasswdRUN sed -ri s/^#?PermitRootLogin\s.*/PermitRootLogin yes…...
我的 System Verilog 学习记录(8)
引言 本文简单介绍 SystemVerilog 的接口。 前文链接: 我的 System Verilog 学习记录(1) 我的 System Verilog 学习记录(2) 我的 System Verilog 学习记录(3) 我的 System Verilog 学习记…...
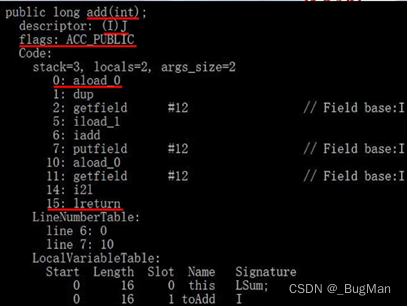
详解JAVA字节码
目录 1.概述 2.字节码文件构成 2.1.魔数 2.2.版本号 2.3.常量池 2.4.访问标志 2.5.索引 2.6.字段表 2.7.方法表 3.字节码指令 3.1.概述 3.2.指令分类 3.2.1.加载存储指令 3.2.2.运算指令 3.2.3.其他指令 3.3.完整指令工作流程 4.字节码保护 1.概述 以往的编程…...
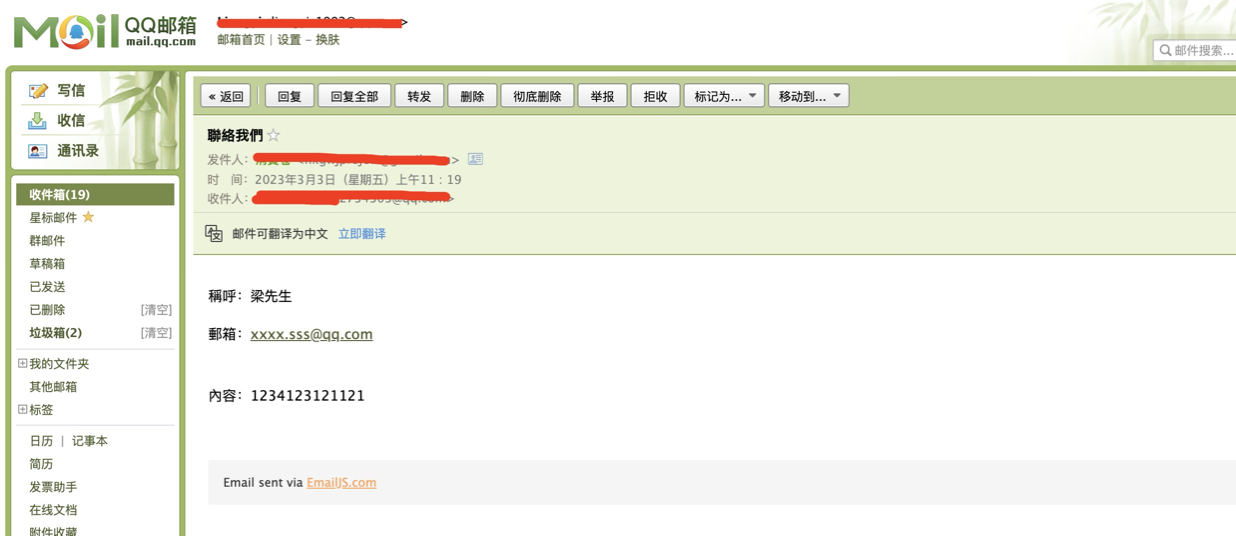
前端利用emailjs发送邮件
最近有一个需求,前端发送一个form表单到一个邮箱,找了一圈发现emailjs还不错就使用他了。首先emailjs官网注册一个账号注册完之后创建一个邮件服务(我这里使用的是谷歌邮箱)链接谷歌邮箱账户 然后创建服务接下来就要创建一个邮件的…...

16 Nacos服务端服务注册源码分析
Nacos服务端服务注册源码分析 服务端调用接口 我们已经知道客户端在注册服务的时候实际上是调用的NamingService.registerInstance这个方法来完成实例的注册,而且在最后我们也告诉了大家实际上从本质上讲服务注册就是调用的对应接口nacos/v1/ns/instanceÿ…...

Spring Boot2中如何优雅地个性化定制Jackson
概述 本文的编写初衷,是想了解一下Spring Boot2中,具体是怎么序列化和反序列化JSR 310日期时间体系的,Spring MVC应用场景有如下两个: 使用RequestBody来获取JSON参数并封装成实体对象;使用ResponseBody来把返回给前…...

2023年全国最新食品安全管理员精选真题及答案11
百分百题库提供食品安全管理员考试试题、食品安全员考试预测题、食品安全管理员考试真题、食品安全员证考试题库等,提供在线做题刷题,在线模拟考试,助你考试轻松过关。 101.婴幼儿配方乳粉的产品配方应当经()部门注册。…...
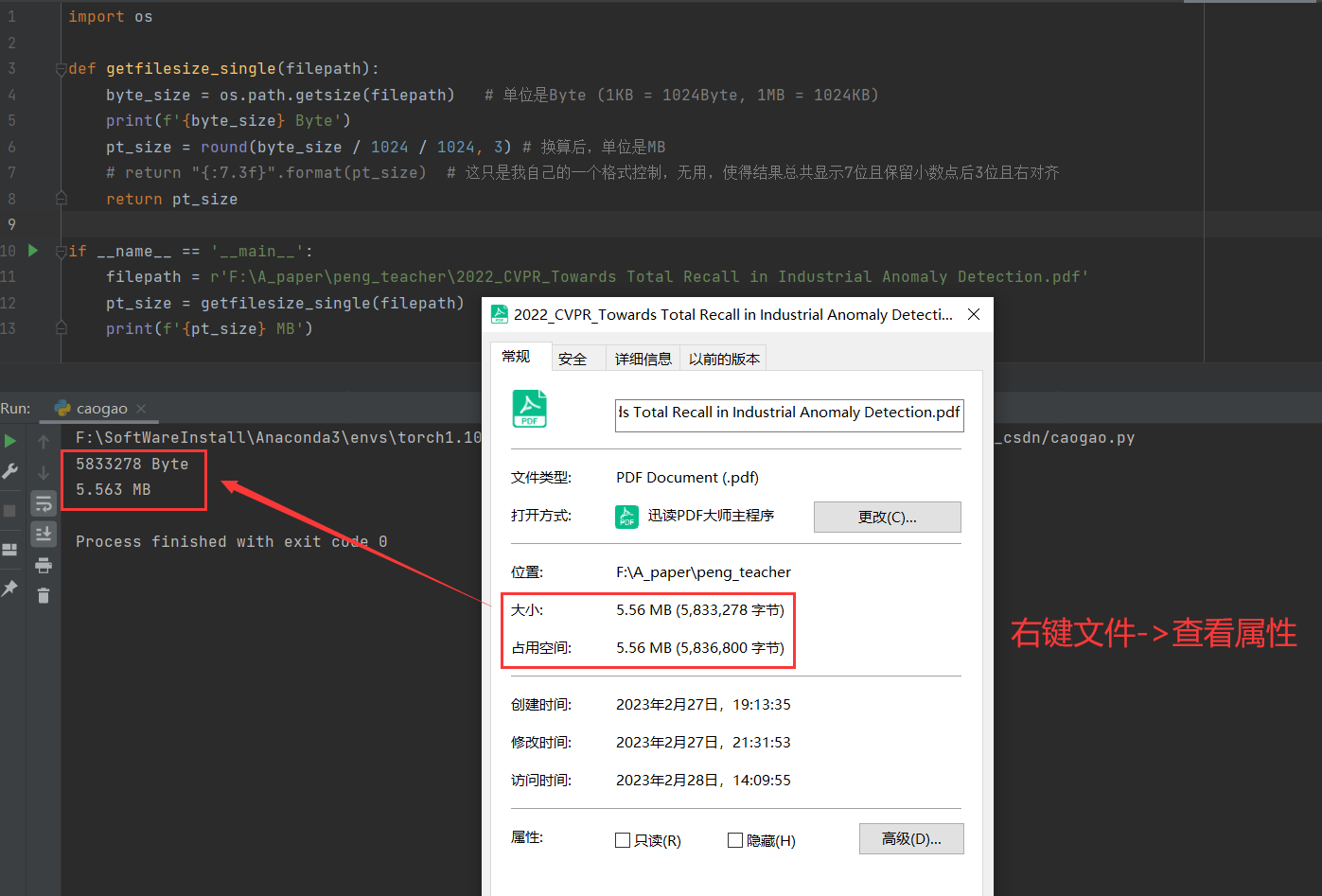
【脚本】用于得到某个文件/文件夹所有文件的存储大小(MB单位)
知识点 来自在线转换换算网页:在线文件大小(bit,bytes,KB,MB,GB,TB)转换换算 电脑中存储常用的单位: 1Byte(Byte 字节) 8Bit 1KB (Kilobyte 千字节) 1024Byte 1MB (Megabyte,兆字节,简称“兆”) 1024KB 1GB (Gigabyte&am…...
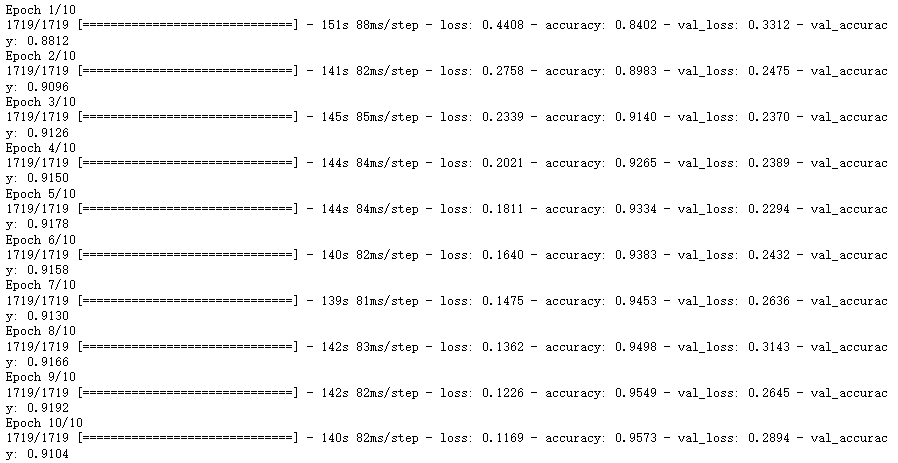
19- CNN进行Fashion-MNIST分类 (tensorflow系列) (项目十九)
项目要点 Fashion-MNIST总共有十个类别的图像。代码运行位置 CPU: cputf.config.set_visible_devices(tf.config.list_physical_devices("CPU"))fashion_mnist keras.datasets.fashion_mnist # fashion_mnist 数据导入训练数据和测试数据拆分: x_valid, x_train…...
【正点原子FPGA连载】第二十二章IP封装与接口定义实验 摘自【正点原子】DFZU2EG_4EV MPSoC之嵌入式Vitis开发指南
1)实验平台:正点原子MPSoC开发板 2)平台购买地址:https://detail.tmall.com/item.htm?id692450874670 3)全套实验源码手册视频下载地址: http://www.openedv.com/thread-340252-1-1.html 第二十二章IP封装…...

【ElasticSearch8.X】学习笔记(二)
【ElasticSearch8.X】学习笔记四、基础操作4.1、索引操作4.1.1、创建索引4.1.2、查询指定索引4.1.3、查询所有索引4.1.4、 删除索引4.2、文档操作4.2.1、创建文档4.2.2、查询文档4.2.3、修改文档4.2.4、删除文档4.2.5、查询所有文档4.3、数据搜索4.3.1、匹配查询文档4.3.2、匹配…...

【高频电子线路】从抽头到变压器:解锁谐振功率放大器的阻抗变换实战
1. 高频电路中的阻抗匹配为什么重要 我第一次调试射频功放时,烧掉了三个末级晶体管才明白一个道理:高频电路里,阻抗不匹配就像让卡车走自行车道。那个周末实验室里飘着的焦糊味,至今让我对阻抗变换保持敬畏。 在高频环境下&#x…...

5分钟搞定Windows激活:KMS_VL_ALL_AIO一键激活全指南
5分钟搞定Windows激活:KMS_VL_ALL_AIO一键激活全指南 【免费下载链接】KMS_VL_ALL_AIO Smart Activation Script 项目地址: https://gitcode.com/gh_mirrors/km/KMS_VL_ALL_AIO 你是否刚重装完系统,面对"Windows未激活"的提示感到头疼&…...

nslookup-mcp:基于MCP协议的DNS查询工具部署与实战指南
1. 项目概述:一个为安全与开发场景设计的DNS查询工具如果你经常需要排查网络问题、分析域名配置,或者像我一样,在渗透测试或安全研究时,需要快速、批量地查询DNS记录,那么命令行里的nslookup或dig工具可能已经让你感到…...

Applite:Mac软件管理的图形化革命,告别命令行操作
Applite:Mac软件管理的图形化革命,告别命令行操作 【免费下载链接】Applite User-friendly GUI macOS application for Homebrew Casks 项目地址: https://gitcode.com/gh_mirrors/ap/Applite 还在为Mac软件安装更新而烦恼吗?Applite作…...

从IR压降到远程采样:大电流PCB供电设计的实战经验与陷阱规避
1. 项目背景与问题浮现几年前,我参与了一个项目,主电源是一个标准的开放式机架电源,需要为一个位于机箱内相对较远的模块提供5V、约20A的直流电。最初的供电路径设计是依靠PCB走线,我们使用了1盎司铜厚的板材。问题很快就出现了&a…...

【JWT】JWS与JWE实战解析:从结构差异到安全选型指南
1. JWT、JWS与JWE的核心概念解析 第一次接触JWT相关技术时,我也曾被各种缩写搞得晕头转向。直到在真实项目中踩过几次坑,才真正理解它们之间的关系。简单来说,JWT就像是一个快递包裹,而JWS和JWE则是两种不同的包装方式——前者像…...

2026测绘、遥感、地信三大专业就业现状对比
01测绘测绘目前的情况是易就业,劳动密集但薪酬不高,且比较辛苦。招聘网站上测绘的岗位一搜一大把:测绘实习岗位也非常多:但是大部分测绘岗位没有递进式积累。很多岗位会呈现一个类似下面公式的发展路线图:”助理--XX师…...

使用Node.js在虚拟机后端服务中集成Taotoken多模型调用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用Node.js在虚拟机后端服务中集成Taotoken多模型调用 在虚拟机环境中部署Node.js后端服务时,直接对接多个大模型厂商…...

3步快速上手:用dupeGuru轻松清理重复文件,释放宝贵磁盘空间
3步快速上手:用dupeGuru轻松清理重复文件,释放宝贵磁盘空间 【免费下载链接】dupeguru Find duplicate files 项目地址: https://gitcode.com/gh_mirrors/du/dupeguru 你是否经常为电脑中堆积如山的重复文件而烦恼?照片、文档、音乐文…...
)
双系统‘分手’指南:在UEFI模式下彻底卸载Ubuntu并回收磁盘空间(附EasyUEFI使用详解)
双系统卸载全攻略:安全移除Ubuntu并回收磁盘空间的终极指南 你是否曾经为了体验Linux而在Windows电脑上安装了Ubuntu双系统,现在却想回归单一操作系统?面对复杂的UEFI引导和磁盘分区,很多人担心操作不当会导致系统崩溃或数据丢失。…...