机器人相关知识
机器人学(Robotics)
一些基础概念
位姿
位姿=位置+姿态
位姿的表示
刚体
刚性物体是一组粒子的集合,其中任意两个粒子之间的距离保持固定,不受物体运动或施加在物体上的力的影响。
“完全不可变形”的物体就是刚体。
刚体位置
刚性连杆
在理想状态下,忽略掉实际情况中的结构形变,我们可以将操作臂视为一系列刚体通过关节连接形成的一个运动链,我们将这些刚体称为连杆。
自由度
机器人机构能够独立运动的关节数目,称为机器人机构的运动自由度,简称自由度。
机动度

柔性
即,机器人可编程。
操作点
操作者在机械臂上选择的一个点,通过这个点来秒速机械臂的运动。
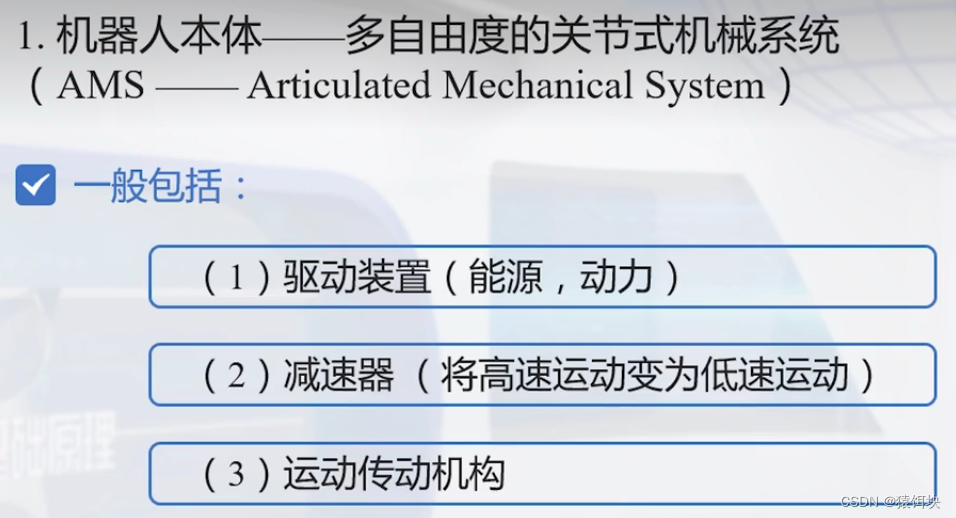
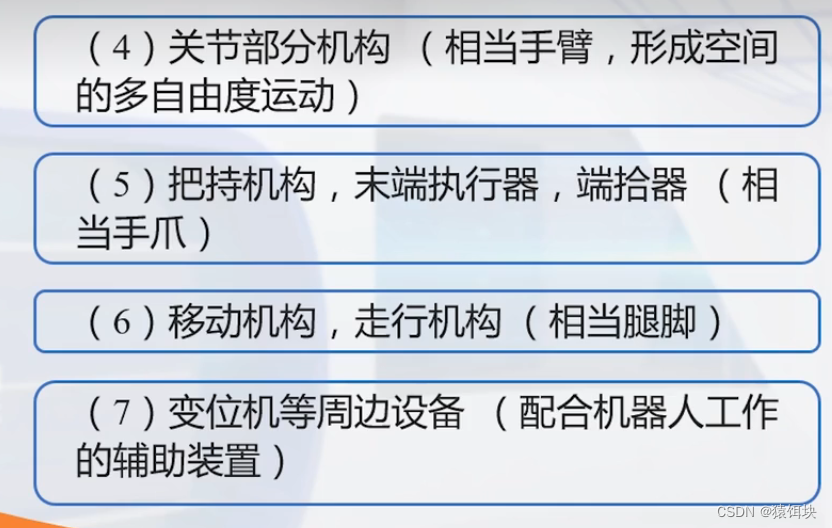
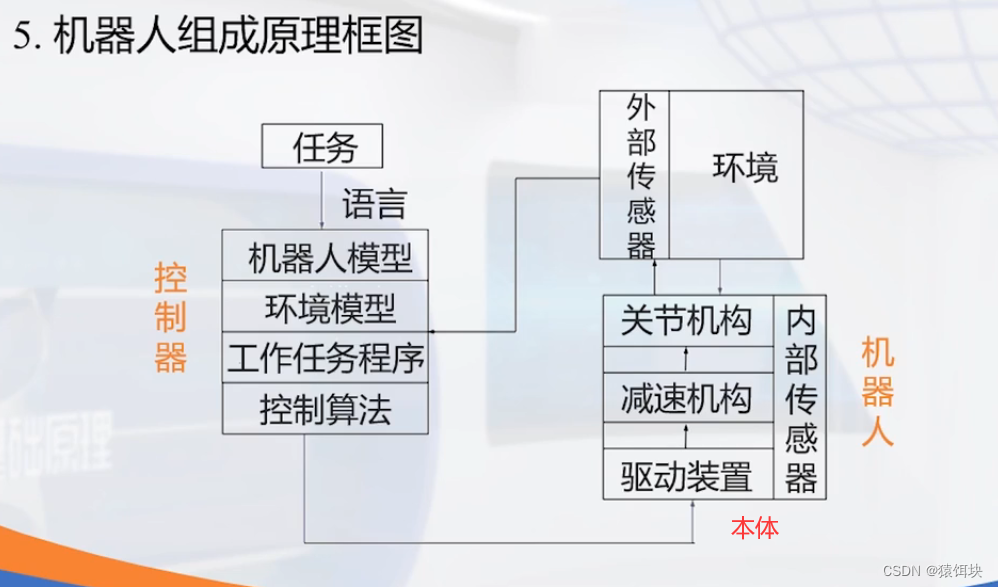
机器人的基本组成
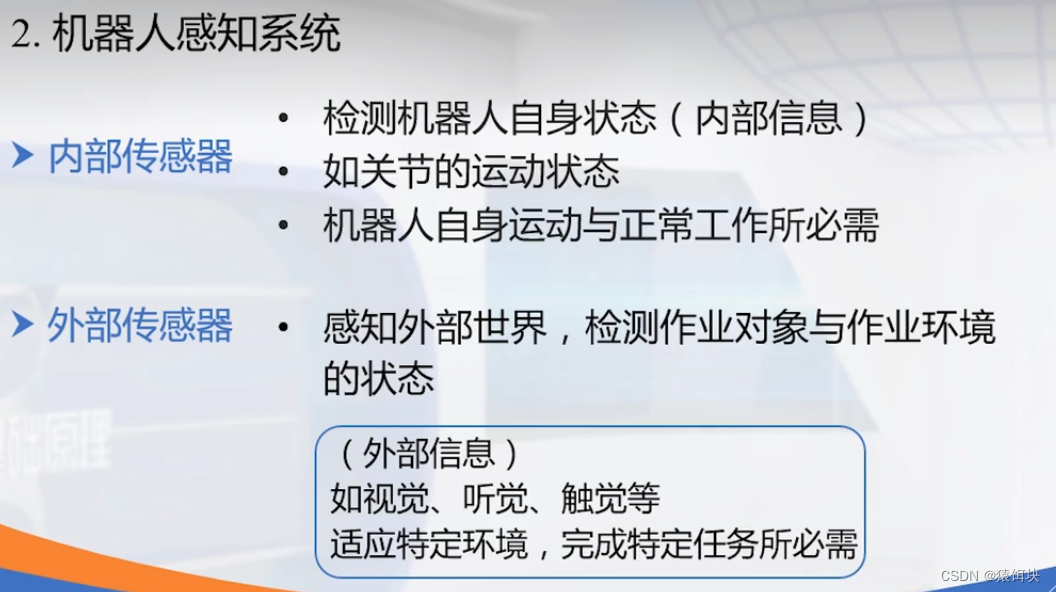
机器人感知系统
机器人的控制系统

机器人决策系统

机器人组成原理抠图
机器人的一些基本概念: 位置,姿态,姿态可以用欧拉角、四元数或旋转矩阵描述,位姿矩阵(4x4的齐次矩阵),轴(joint),连杆(link),自由度(degree of freedom), 末端, 法兰,运动学正解是由各轴角度求末端位姿,运动学逆解是由末端位姿求各轴角度,动力学正解,动力学逆解,位置、速度、加速度、力矩,机器人路径规划是规划的位置点,轨迹规划是位置点+速度点+加速度点
机械臂正运动学
机械臂逆运动学
相关文章:
机器人相关知识
机器人学(Robotics) 一些基础概念 位姿 位姿位置姿态 位姿的表示 刚体 刚性物体是一组粒子的集合,其中任意两个粒子之间的距离保持固定,不受物体运动或施加在物体上的力的影响。 “完全不可变形”的物体就是刚体。 刚体位置 刚性连杆 …...
)
八股文打卡day22——操作系统(5)
面试题:什么是死锁?如何避免死锁? 我的回答: 死锁是两个或者多个进程都占有各自的资源,然后都互相请求资源,导致互相都陷入了阻塞状态。 如何避免死锁呢? 首先,造成死锁有四个必要…...

SQL Server 权限管理
CSDN 成就一亿技术人! 2024年 第一篇 难度指数:* * CSDN 成就一亿技术人! 目录 1. 权限管理 什么是权限管理? SQL server的安全机制 服务器级角色 数据库级角色 对象级角色 2. 创建用户 赋予权限 最重要的一步骤 1. 权限…...

ReentrantLock底层原理学习一
J.U.C 简介 Java.util.concurrent 是在并发编程中比较常用的工具类,里面包含很多用来在并发场景中使用的组件。比如线程池、阻塞队列、计时器、同步器、并发集合等等。并发包的作者是大名鼎鼎的 Doug Lea。我们在接下来的课程中,回去剖析一些经典的比较…...
数字孪生在增强现实(AR)中的应用
数字孪生在增强现实(Augmented Reality,AR)中的应用可以提供更丰富、交互性更强的现实世界增强体验。以下是数字孪生在AR中的一些应用,希望对大家有所帮助。北京木奇移动技术有限公司,专业的软件外包开发公司ÿ…...
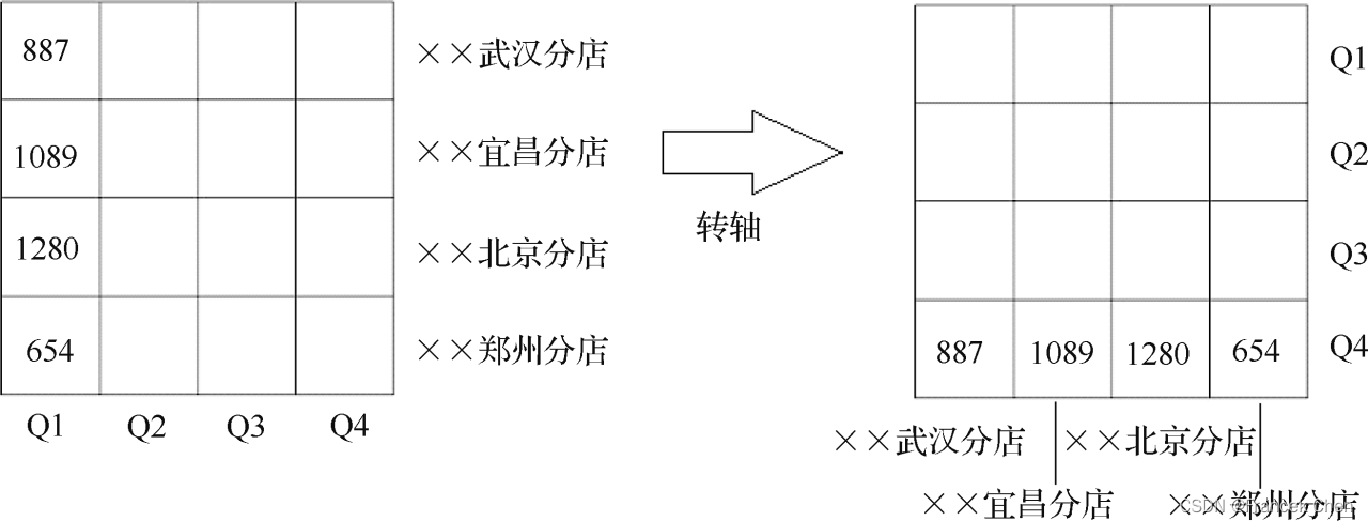
【数据仓库与联机分析处理】多维数据模型
目录 一、数据立方体 二、数据模型 (一)星形模型 (二)雪花模式 (三)事实星座模式 三、多维数据模型中的OLAP操作 (一)下钻 (二)上卷 (三…...

【网络面试(3)】浏览器委托协议栈完成消息的收发
前面的博客中,提到过很多次,浏览器作为应用程序,本身是不具备向网络中发送网络请求的能力,要委托操作系统的内核协议栈来完成。协议栈再调用网卡驱动,通过网卡将请求消息发送出去,本篇博客就来探讨一下这个…...

Kotlin: Jetpack — ViewModel简单应用
ViewModel 概览 Android Jetpack 的一部分。 ViewModel 类是一种业务逻辑或屏幕级状态容器。它用于将状态公开给界面,以及封装相关的业务逻辑。 它的主要优点是,它可以缓存状态,并可在配置更改后持久保留相应状态。这意味着在 activity 之…...
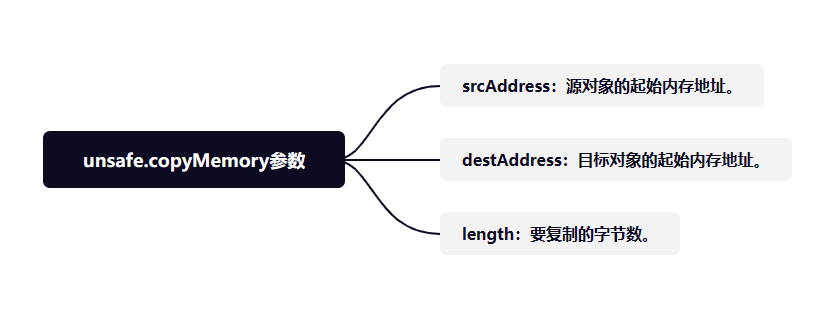
【Java技术专题】「攻破技术盲区」攻破Java技术盲点之unsafe类的使用指南(打破Java的安全管控— sun.misc.unsafe)
Java后门机制 — sun.misc.unsafe 打破Java的安全管控关于Unsafe的编程建议实例化Unsafe后门对象使用sun.misc.Unsafe创建实例单例模式处理实现浅克隆(直接获取内存的方式)直接使用copyMemory原理分析 密码安全使用Unsafe类—示例代码 运行时动态创建类超…...
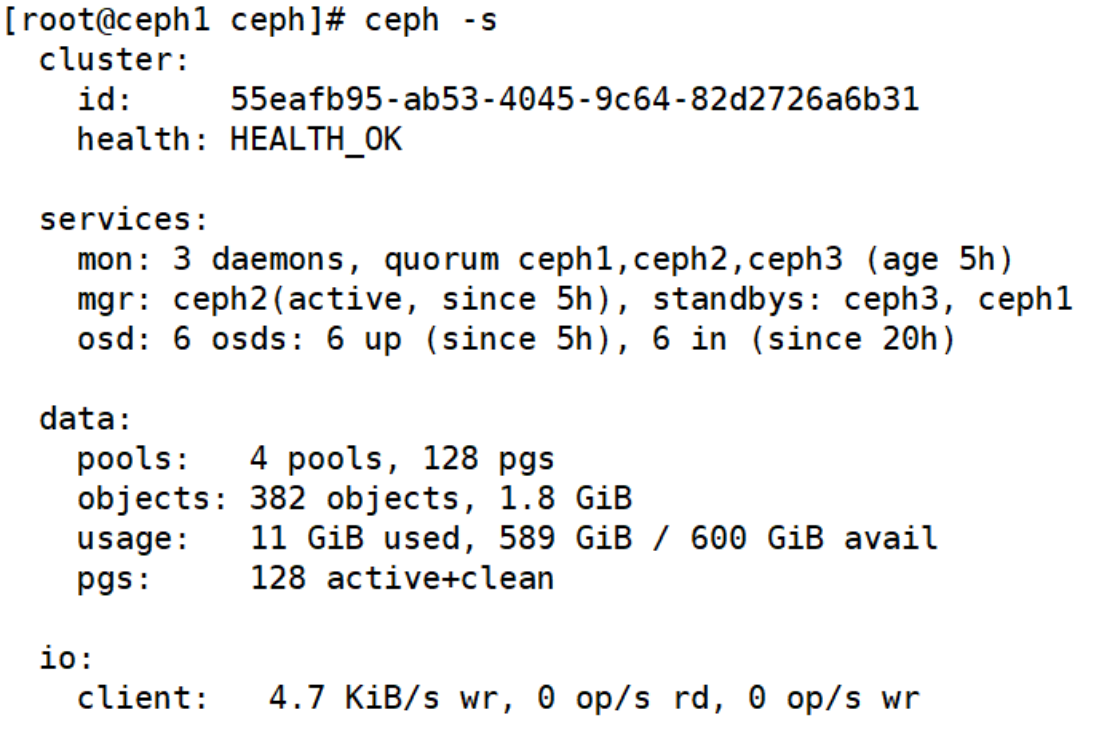
私有云平台搭建openstack和ceph结合搭建手册
OpenStack与云计算 什么是云? 如何正确理解云,可以从以下几个方面。 云的构成。 用户:对用户而言是透明无感知的,不用关心底层构成,只需要知道利用云完成自己任务即可。 云提供商:对云资产管理和运维。 云…...
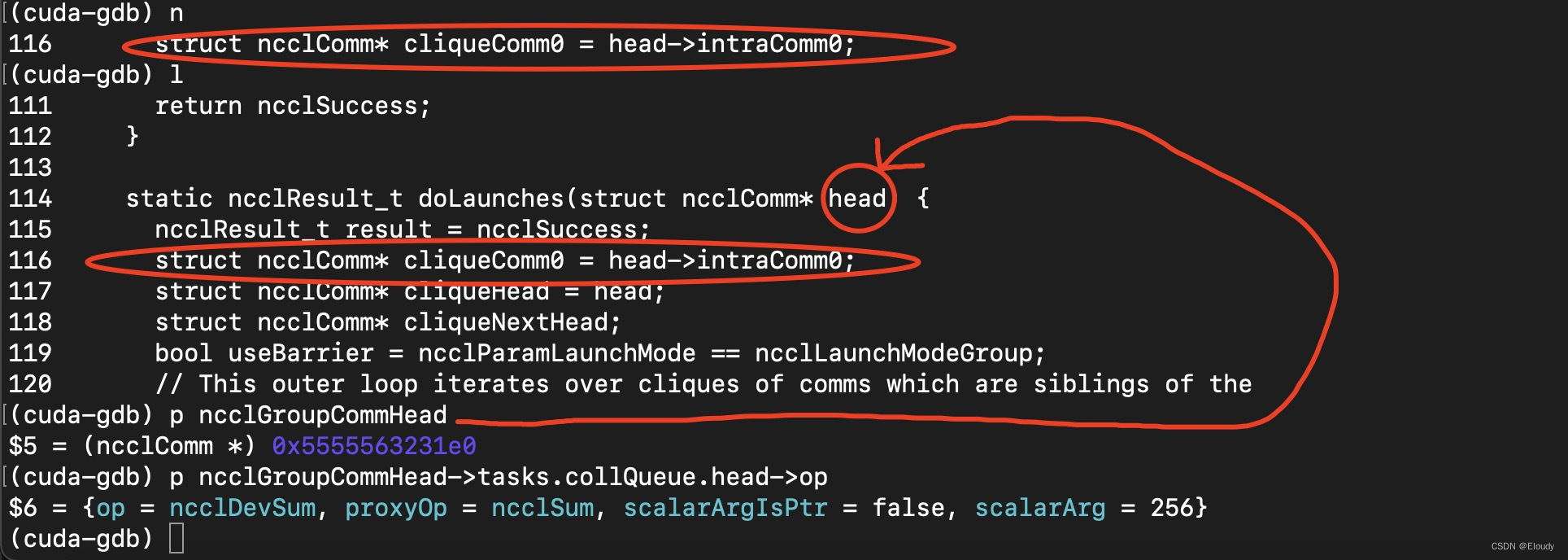
debug mccl 02 —— 环境搭建及初步调试
1, 搭建nccl 调试环境 下载 nccl 源代码 git clone --recursive https://github.com/NVIDIA/nccl.git 只debug host代码,故将设备代码的编译标志改成 -O3 (base) hipperhipper-G21:~/let_debug_nccl/nccl$ git diff diff --git a/makefiles/common.mk b/makefiles/…...

ros python 接收GPS RTK 串口消息再转发 ros 主题消息
代码是一个ROS(Robot Operating System)节点,用于从GPS设备读取RTK(实时动态)数据并通过ROS主题发布。 步骤: 导入必要的模块: rospy 是ROS的Python库,用于ROS的节点、发布者和订阅者。serial 用于串行通信。NavSatFix 和 NavSatStatus 是从GPS接收的NMEA 0183标准消息…...

2024年网络安全竞赛-页面信息发现任务解析
页面信息发现任务说明: 服务器场景:win20230305(关闭链接)在渗透机中对服务器信息收集,将获取到的服务器网站端口作为Flag值提交;访问服务器网站页面,找到主页面中的Flag值信息,将Flag值提交;访问服务器网站页面,找到主页面中的脚本信息,并将Flag值提交;访问服务器…...

ARM DMA使用整理
Direct Memory Access, 直接存储访问。同SPI,IIC,USART等一样,属于MCU的一个外设,用于在不需要MCU介入的情况下进行数据传输。可以将数据从外设传输到flash,也可以将数据从flash传输到外设,或者flash内部数据移动。 它…...
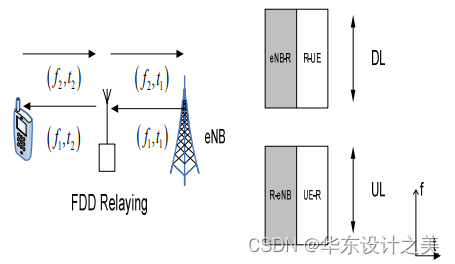
移动通信原理与关键技术学习(第四代蜂窝移动通信系统)
前言:LTE 标准于2008 年底完成了第一个版本3GPP Release 8的制定工作。另一方面,ITU 于2007 年召开了世界无线电会议WRC07,开始了B3G 频谱的分配,并于2008 年完成了IMT-2000(即3G)系统的演进——IMT-Advanc…...

光明源@智慧厕所技术:优化生活,提升卫生舒适度
在当今数字科技飞速发展的时代,我们的日常生活正在经历一场革命,而这场革命的其中一个前沿领域就是智慧厕所技术。这项技术不仅仅是对传统卫生间的一次升级,更是对我们生活品质的全方位提升。从智能感应到数据分析,从环保设计到舒…...

【Bootstrap学习 day13】
Bootstrap5 下拉菜单 下拉菜单通常用于导航标题内,在用户鼠标悬停或单击触发元素时显示相关链接列表。 基础的下拉列表 <div class"dropdown"><button type"button" class"btn btn-primary dropdown-toggle" data-bs-toggl…...

Shell:常用命令之dirname与basename
一、介绍 1、dirname命令用于去除文件名中的非目录部分,删除最后一个“\”后面的路径,显示父目录。 语法:dirname [选项] 参数 2、basename命令用于打印目录或者文件的基本名称,显示最后的目录名或文件名。 语法:basen…...
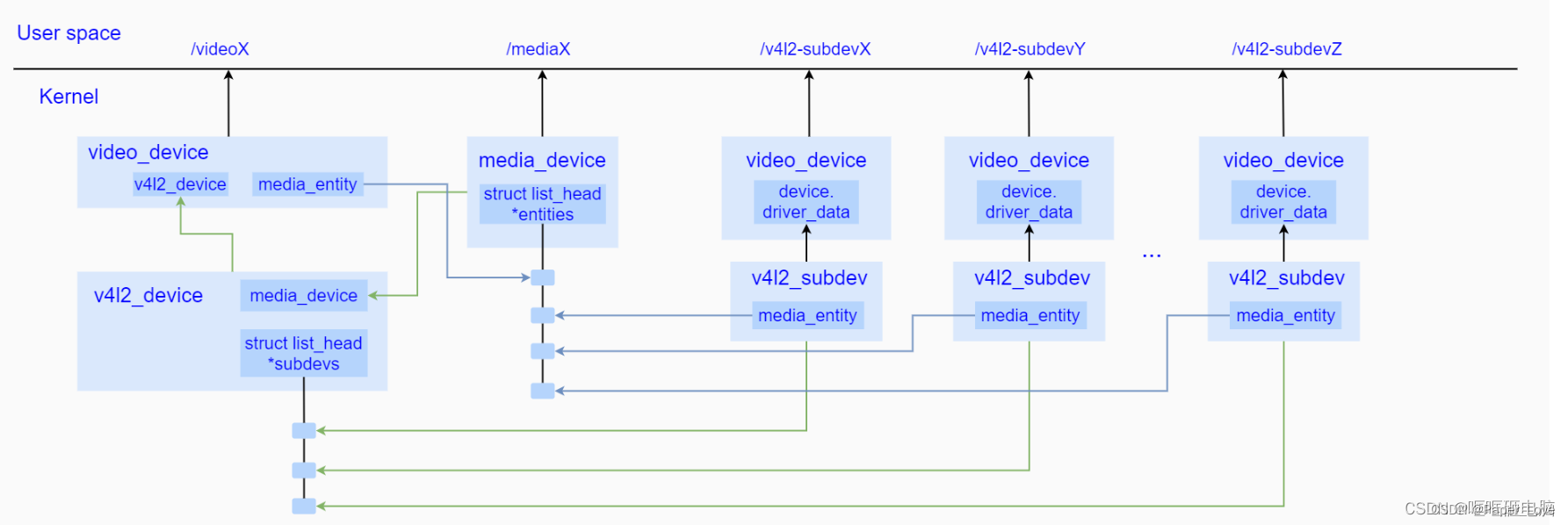
Linux-v4l2框架
框架图 从上图不难看出,v4l2_device作为顶层管理者,一方面通过嵌入到一个video_device中,暴露video设备节点给用户空间进行控制;另一方面,video_device内部会创建一个media_entity作为在media controller中的抽象体&a…...

VPC网络架构下的网络上数据采集
介绍 想象这样一个场景,一开始在公司里,所有的部门的物理机、POD都在一个经典网络内,它们可以通过 IP 访问彼此,没有任何限制。因此有很多系统基于此设计了很多点对点 IP 直连的访问,比如中心控制服务器 S 会主动访问物…...

嵌入式系统调试实战:工具、技巧与内存管理
1. 嵌入式调试的核心价值与挑战从事嵌入式开发十多年来,我深刻体会到调试环节往往决定着项目的成败。与桌面软件开发不同,嵌入式系统一旦部署后很难进行现场维护,这就要求我们必须在上线前解决所有潜在问题。根据行业统计,嵌入式工…...

Milvus单机版部署避坑实录:为什么你的etcd和minio启动后,Milvus还是连不上?
Milvus单机版部署避坑指南:从容器状态到服务就绪的深度解析 当你按照官方文档执行完docker-compose up -d,满心期待地打开Attu界面准备大展身手时,"Connection refused"的红色警告却当头泼下一盆冷水——这可能是许多开发者与Milvu…...

从零到专业:League Director 让你的英雄联盟回放变成电影级大片
从零到专业:League Director 让你的英雄联盟回放变成电影级大片 【免费下载链接】leaguedirector League Director is a tool for staging and recording videos from League of Legends replays 项目地址: https://gitcode.com/gh_mirrors/le/leaguedirector …...

新手福音:用快马平台生成wsl安装ubuntu图文教程,轻松入门linux开发
最近在学Linux开发,发现Windows Subsystem for Linux(WSL)真是个神器,特别是搭配Ubuntu使用,既保留了Windows的便利性,又能体验原汁原味的Linux环境。不过刚开始安装配置时踩了不少坑,后来用Ins…...

告别水印烦恼!3步轻松去水印,新手秒上手。
找到心仪的图片有水印、做设计好不容易找到的素材有水印、下载好看的壁纸有水印,遇到的好图全被水印扫兴?PS去水印,操作复杂,学习成本高,浪费时间;用专业去水印工具,收费昂贵,还有广…...

杨立昆新模型杀疯了,1500万参数单GPU就能碾压大厂?
就在前几天,AI教父、图灵奖得主杨立昆刚发了个新模型,名叫LeWorldModel,论文一发出,整个圈子瞬间炸锅。说出来你们可能都不信——这货只有1500万参数,单块GPU几个小时就能训完,随便一个研究者都拉起来跑一遍…...

坚定信心,顺势而为 ——中国企业出海与人工智能时代语言服务行业的新机遇
坚定信心,顺势而为——中国企业出海与人工智能时代语言服务行业的新机遇前言人工智能技术的逐步成熟以及智能体的普遍应用是最近两三年的热点和趋势,很多人说,2026年是智能体爆发的元年。春节期间,豆包、千问、元宝等50亿元的红包…...

目录中不显示标题中间的软换行符Shift+Enter
文档中的标题过长时,通常使用ShiftEnter软换行符来给标题在合适的位置换行,以实现美观的排版效果。然而,插入软换行符会造成自动产生的目录中标题文本中间出现空格,如图所示:那么,如何让目录中不显示这个软…...

PingFangSC字体专业配置与高效应用实践指南
PingFangSC字体专业配置与高效应用实践指南 【免费下载链接】PingFangSC PingFangSC字体包文件、苹果平方字体文件,包含ttf和woff2格式 项目地址: https://gitcode.com/gh_mirrors/pi/PingFangSC 在数字设计领域,字体选择直接影响用户体验与信息传…...

无损视频剪辑效率全攻略:5分钟掌握革新性剪辑技术
无损视频剪辑效率全攻略:5分钟掌握革新性剪辑技术 【免费下载链接】lossless-cut The swiss army knife of lossless video/audio editing 项目地址: https://gitcode.com/gh_mirrors/lo/lossless-cut 你是否曾因视频剪辑软件的漫长渲染过程而错失发布良机&a…...