HPM6750开发笔记《DMA接收和发送数据UART例程深度解析》
目录
概述:
端口设置:
代码分析:
运行现象:
概述:
DMA(Direct Memory Access)是一种计算机系统中的数据传输技术,它允许数据在不经过中央处理器(CPU)的直接控制下在内存和外设之间传输。UART(Universal Asynchronous Receiver/Transmitter)是一种串行通信协议,用于在设备之间传输数据。
在DMA接收和发送数据的情况下,DMA可以用于管理UART通信中的数据传输。具体来说:
-
DMA接收数据:
- 当UART接收到数据时,通常会触发中断来通知CPU。
- 使用DMA时,DMA控制器可以直接从UART接收缓冲区中读取数据,并将其存储到内存中,而无需CPU的干预。
- 这允许在数据到达时实现高效的数据传输,减轻了CPU的负担。
-
DMA发送数据:
- 当需要通过UART发送数据时,通常需要将数据写入UART的发送缓冲区,并等待发送完成。
- 使用DMA时,DMA控制器可以直接从内存中获取要发送的数据,并将其传输到UART发送缓冲区,而无需CPU的干预。
- 这提高了数据传输的效率,因为CPU可以继续执行其他任务而无需等待数据发送完成。
总的来说,DMA在UART通信中的应用可以提高数据传输的效率,减少对CPU的依赖,使系统能够更有效地处理数据。
端口设置:
波特率115200 1位停止位 无奇偶校验
代码分析:
包含了一些头文件,包含了与底层硬件和外设驱动相关的定义和函数声明
义了一些与UART相关的宏,如UART的基地址、时钟名、DMA请求等
声明了两个全局变量 uart_tx_dma_done 和 uart_rx_dma_done,用于表示UART的发送和接收DMA是否完成
#include "board.h"
#include "hpm_clock_drv.h"
#include "hpm_uart_drv.h"
#ifdef CONFIG_HAS_HPMSDK_DMAV2
#include "hpm_dmav2_drv.h"
#else
#include "hpm_dma_drv.h"
#endif
#include "hpm_dmamux_drv.h"
#include "hpm_l1c_drv.h"
#include "hpm_common.h"#define TEST_UART BOARD_APP_UART_BASE
#define TEST_UART_CLK_NAME BOARD_APP_UART_CLK_NAME
#define TEST_UART_TX_DMA_REQ BOARD_APP_UART_TX_DMA_REQ
#define TEST_UART_RX_DMA_REQ BOARD_APP_UART_RX_DMA_REQ#define TEST_UART_DMA_CONTROLLER BOARD_APP_HDMA
#define TEST_UART_DMAMUX_CONTROLLER BOARD_APP_DMAMUX
#define TEST_UART_TX_DMA_CHN (0U)
#define TEST_UART_RX_DMA_CHN (1U)
#define TEST_UART_TX_DMAMUX_CHN DMA_SOC_CHN_TO_DMAMUX_CHN(TEST_UART_DMA_CONTROLLER, TEST_UART_TX_DMA_CHN)
#define TEST_UART_RX_DMAMUX_CHN DMA_SOC_CHN_TO_DMAMUX_CHN(TEST_UART_DMA_CONTROLLER, TEST_UART_RX_DMA_CHN)
#define TEST_UART_DMA_IRQ BOARD_APP_HDMA_IRQ#define TEST_BUFFER_SIZE (16U)
ATTR_PLACE_AT_NONCACHEABLE uint8_t uart_buff[TEST_BUFFER_SIZE];volatile bool uart_tx_dma_done;
volatile bool uart_rx_dma_done;hpm_stat_t uart_tx_trigger_dma(DMA_Type *dma_ptr,uint8_t ch_num,UART_Type *uart_ptr,uint32_t src,uint32_t size)
{dma_handshake_config_t config;dma_default_handshake_config(dma_ptr, &config);config.ch_index = ch_num;config.dst = (uint32_t)&uart_ptr->THR;config.dst_fixed = true;config.src = src;config.src_fixed = false;config.data_width = DMA_TRANSFER_WIDTH_BYTE;config.size_in_byte = size;return dma_setup_handshake(dma_ptr, &config, true);
}-
参数说明:
dma_ptr: DMA控制器的指针,指向用于配置和控制DMA的硬件寄存器。ch_num: DMA通道号,表示要配置的DMA通道。uart_ptr: UART控制器的指针,指向用于配置和控制UART的硬件寄存器。src: 数据源的地址,这是UART发送数据的来源。size: 要传输的数据大小,以字节为单位。
-
函数逻辑:
- 创建一个
dma_handshake_config_t类型的结构体变量config,用于配置DMA的握手参数。 - 调用
dma_default_handshake_config函数初始化config结构体,设置了一些默认的DMA握手参数。 - 设置
config结构体的各个成员:ch_index: DMA通道号。dst: 目的地地址,这里是UART的传输保持寄存器(THR - Transmitter Holding Register)的地址。dst_fixed: 目的地地址是否固定,这里设置为true,表示目的地地址不变。src: 数据源地址,即要发送的数据的地址。src_fixed: 数据源地址是否固定,这里设置为false,表示数据源地址可能变化。data_width: 数据传输宽度,这里设置为字节宽度。size_in_byte: 要传输的数据大小。
- 创建一个
-
返回值:
- 调用
dma_setup_handshake函数,根据配置好的参数设置DMA握手,并返回相应的状态。
- 调用
-
注意事项:
- 该函数通过设置DMA的握手参数,将UART的发送数据配置到DMA通道中,并返回相应的状态,用于后续判断是否配置成功。
这个函数的作用是通过DMA实现UART的发送数据,配置了DMA握手参数,确保数据正确地传输到UART传输保持寄存器中。
hpm_stat_t uart_rx_trigger_dma(DMA_Type *dma_ptr,uint8_t ch_num,UART_Type *uart_ptr,uint32_t dst,uint32_t size)
{dma_handshake_config_t config;dma_default_handshake_config(dma_ptr, &config);config.ch_index = ch_num;config.dst = dst;config.dst_fixed = false;config.src = (uint32_t)&uart_ptr->RBR;config.src_fixed = true;config.data_width = DMA_TRANSFER_WIDTH_BYTE;config.size_in_byte = size;return dma_setup_handshake(dma_ptr, &config, true);
}-
参数说明:
dma_ptr: DMA控制器的指针,指向用于配置和控制DMA的硬件寄存器。ch_num: DMA通道号,表示要配置的DMA通道。uart_ptr: UART控制器的指针,指向用于配置和控制UART的硬件寄存器。dst: 数据目的地的地址,这是用于存储UART接收数据的缓冲区的地址。size: 要传输的数据大小,以字节为单位。
-
函数逻辑:
- 创建一个
dma_handshake_config_t类型的结构体变量config,用于配置DMA的握手参数。 - 调用
dma_default_handshake_config函数初始化config结构体,设置了一些默认的DMA握手参数。 - 设置
config结构体的各个成员:ch_index: DMA通道号。dst: 目的地地址,即UART接收数据的缓冲区地址。dst_fixed: 目的地地址是否固定,这里设置为false,表示目的地地址可能变化。src: 数据源地址,这里是UART的接收保持寄存器(RBR - Receiver Buffer Register)的地址。src_fixed: 数据源地址是否固定,这里设置为true,表示数据源地址不变。data_width: 数据传输宽度,这里设置为字节宽度。size_in_byte: 要传输的数据大小。
- 创建一个
-
返回值:
- 调用
dma_setup_handshake函数,根据配置好的参数设置DMA握手,并返回相应的状态。
- 调用
-
注意事项:
- 该函数通过设置DMA的握手参数,将UART的接收数据配置到DMA通道中,并返回相应的状态,用于后续判断是否配置成功。
这个函数的作用是通过DMA实现UART的接收数据,配置了DMA握手参数,确保UART接收到的数据传输到指定的缓冲区中。
void dma_isr(void)
{volatile hpm_stat_t stat_rx_chn, stat_tx_chn;stat_rx_chn = dma_check_transfer_status(TEST_UART_DMA_CONTROLLER, TEST_UART_RX_DMA_CHN);if (stat_rx_chn & DMA_CHANNEL_STATUS_TC) {uart_rx_dma_done = true;}stat_tx_chn = dma_check_transfer_status(TEST_UART_DMA_CONTROLLER, TEST_UART_TX_DMA_CHN);if (stat_tx_chn & DMA_CHANNEL_STATUS_TC) {uart_tx_dma_done = true;}
}
SDK_DECLARE_EXT_ISR_M(TEST_UART_DMA_IRQ, dma_isr)-
函数逻辑:
- 定义两个局部变量
stat_rx_chn和stat_tx_chn,用于保存DMA通道的传输状态。 - 调用
dma_check_transfer_status函数检查UART接收和发送的DMA通道的传输状态。 - 如果接收通道的传输状态中包含
DMA_CHANNEL_STATUS_TC(传输完成),则将uart_rx_dma_done置为true,表示UART接收DMA完成。 - 如果发送通道的传输状态中包含
DMA_CHANNEL_STATUS_TC,则将uart_tx_dma_done置为true,表示UART发送DMA完成。
- 定义两个局部变量
-
注意事项:
volatile修饰stat_rx_chn和stat_tx_chn,表示这两个变量可能在中断服务例程之外被修改,确保编译器不会对它们进行优化。- 中断处理函数通过检查DMA通道的传输状态来确定DMA是否完成,从而设置相应的标志位。
-
宏
SDK_DECLARE_EXT_ISR_M:- 该宏用于声明外部中断服务例程。在这里,使用该宏声明了中断服务例程
dma_isr并关联到TEST_UART_DMA_IRQ所指定的中断。
- 该宏用于声明外部中断服务例程。在这里,使用该宏声明了中断服务例程
这个中断服务例程的作用是在DMA传输完成时被调用,检查相应的DMA通道状态,并设置标志位以通知主程序相应的DMA传输已完成。
int main(void)
{hpm_stat_t stat;uart_config_t config = {0};board_init();printf("UART DMA \n");printf("UART will send back received characters, echo every %d bytes\n", TEST_BUFFER_SIZE);/* if TEST_UART is same as BOARD_CONSOLE_BASE, it has been initialized in board_init(); */board_init_uart(TEST_UART);uart_default_config(TEST_UART, &config);config.fifo_enable = true;config.dma_enable = true;config.src_freq_in_hz = clock_get_frequency(TEST_UART_CLK_NAME);config.tx_fifo_level = uart_tx_fifo_trg_not_full;config.rx_fifo_level = uart_rx_fifo_trg_not_empty;stat = uart_init(TEST_UART, &config);if (stat != status_success) {printf("failed to initialize uart\n");while (1) {}}intc_m_enable_irq_with_priority(TEST_UART_DMA_IRQ, 1);dmamux_config(TEST_UART_DMAMUX_CONTROLLER, TEST_UART_RX_DMAMUX_CHN, TEST_UART_RX_DMA_REQ, true);dmamux_config(TEST_UART_DMAMUX_CONTROLLER, TEST_UART_TX_DMAMUX_CHN, TEST_UART_TX_DMA_REQ, true);while (1) {/* config rx dma transfer */stat = uart_rx_trigger_dma(TEST_UART_DMA_CONTROLLER,TEST_UART_RX_DMA_CHN,TEST_UART,core_local_mem_to_sys_address(BOARD_RUNNING_CORE, (uint32_t)uart_buff),TEST_BUFFER_SIZE);if (stat != status_success) {printf("uart rx trigger dma failed\n");break;}while (!uart_rx_dma_done) {__asm("nop");}uart_rx_dma_done = false;/* config tx dma transfer */stat = uart_tx_trigger_dma(TEST_UART_DMA_CONTROLLER,TEST_UART_TX_DMA_CHN,TEST_UART,core_local_mem_to_sys_address(BOARD_RUNNING_CORE, (uint32_t)uart_buff),TEST_BUFFER_SIZE);if (stat != status_success) {printf("uart tx trigger dma failed\n");break;}while (!uart_tx_dma_done) {__asm("nop");}uart_tx_dma_done = false;}while (1) {__asm("nop");}return 0;
}
- 代码逻辑:
- 调用
board_init初始化板子。 - 输出一些提示信息,包括 "UART DMA" 和 UART 将返回接收到的字符,每次回显的字节数。
- 如果
TEST_UART与BOARD_CONSOLE_BASE相同,说明UART已在board_init中初始化。 - 调用
board_init_uart初始化UART。 - 初始化UART配置,包括使能FIFO、DMA,设置传输频率等。
- 调用
uart_init初始化UART,检查初始化是否成功。 - 启用DMA中断,并配置UART的DMA传输请求。
- 进入主循环,循环中:
- 配置UART接收的DMA传输。
- 等待UART接收DMA完成。
- 配置UART发送的DMA传输。
- 等待UART发送DMA完成。
- 如果在DMA配置过程中发生错误,输出相应的错误信息,并跳出主循环。
- 主循环最后有一个空操作,用于保持程序运行。
- 调用
该主函数的主要任务是配置并执行UART的DMA传输,实现了UART接收到的数据的回显。
以下是上述代码的主要运行流程:
-
初始化:
- 初始化嵌入式系统板。
- 打印一些信息,包括 "UART DMA" 和一条关于将接收到的字符发送回去的消息。
- 初始化 UART 模块,包括配置 UART 的基本参数和启用 DMA。
-
设置中断和DMA多路复用:
- 启用 UART DMA 中断并设置中断优先级。
- 配置 DMA 多路复用,将 RX 和 TX DMA 通道与 UART 的相应请求关联。
-
主循环:
- 进入一个无限循环,该循环执行以下操作:
- 配置 RX DMA 传输:设置 UART 接收的 DMA 传输,将接收到的数据存储在
uart_buff缓冲区中。 - 等待 RX DMA 传输完成:通过轮询等待
uart_rx_dma_done标志。 - 在数据前添加 "send" 前缀:将 "send" 字符串复制到
uart_buff的开头。 - 配置 TX DMA 传输:设置 UART 发送的 DMA 传输,发送整个
uart_buff缓冲区的数据。 - 等待 TX DMA 传输完成:通过轮询等待
uart_tx_dma_done标志。
- 配置 RX DMA 传输:设置 UART 接收的 DMA 传输,将接收到的数据存储在
- 进入一个无限循环,该循环执行以下操作:
-
结束:
- 由于主循环是一个无限循环,因此在实际应用中可能需要添加适当的终止条件。
- 在实际应用中,可能还需要在主循环中添加对接收到的数据的处理逻辑。
总体而言,该代码通过 DMA 实现了 UART 数据的异步传输。接收到的数据被存储在 uart_buff 缓冲区中,并在发送之前添加了 "send" 前缀。此过程一直在一个无限循环中进行,确保持续接收和发送数据。
运行现象:
当工程正确运行后,通过串口手动输入字符串,如 ‘1234567887654321’,则串口终端会收到如下信息:
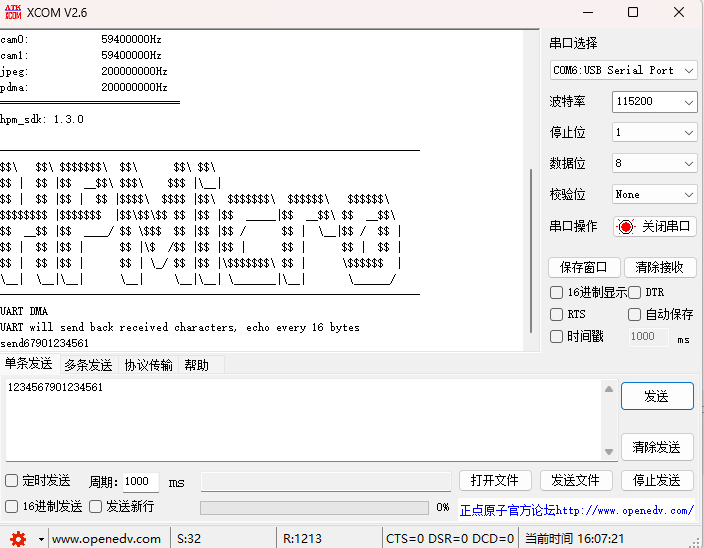
UART DMA example UART will send back received characters, echo every 16 bytes 1234567887654321
相关文章:
HPM6750开发笔记《DMA接收和发送数据UART例程深度解析》
目录 概述: 端口设置: 代码分析: 运行现象: 概述: DMA(Direct Memory Access)是一种计算机系统中的数据传输技术,它允许数据在不经过中央处理器(CPU)的直…...

SQL IN 操作符
IN 操作符 IN 操作符允许您在 WHERE 子句中规定多个值。 SQL IN 语法 SELECT column1, column2, ... FROM table_name WHERE column IN (value1, value2, ...); 参数说明: column1, column2, ...:要选择的字段名称,可以为多个字段。如果…...
如何使用Plex在Windows系统搭建个人媒体站点公网可访问
文章目录 1.前言2. Plex网站搭建2.1 Plex下载和安装2.2 Plex网页测试2.3 cpolar的安装和注册 3. 本地网页发布3.1 Cpolar云端设置3.2 Cpolar本地设置 4. 公网访问测试5. 结语 1.前言 用手机或者平板电脑看视频,已经算是生活中稀松平常的场景了,特别是各…...

web前端——clear可以清除浮动产生的影响
clear可以解决高度塌陷的问题,产生的副作用要小 未使用clear之前 <!DOCTYPE html> <head><meta charset"UTF-8"><title>高度塌陷相关学习</title><style>div{font-size:50px;}.box1{width:200px;height:200px;backg…...

centos用yum安装mysql详细教程
1 查询安装mysql的yum源,命令如下 ls /etc/yum.repos.d/ -l 界面如下图所示,未显示mysql的安装源 2 安装mysql相关的yum源,例如: 例如:rpm -ivh mysql57-community-release-el7.rpm 要注意 mysql的版本和系统的版本匹配 mysql57-communi…...

冲刺2024年AMC8竞赛的专题突破:匹克定律和不规则形状面积的求法
先温馨提示:2024年AMC8比赛报名今天是最后一天,如果还想参加比赛的孩子今天务必完成报名,错过今天再等一年。需要AMC8自由报名通道可以问我。 到昨天为止,六分成长已经把过去20多年的AMC8竞赛真题都给大家过了一遍,今天为大家做一…...

阿里云迁移AWS视频点播技术攻坚
文章目录 🐷 背景🦥 简述🐥 Aws服务🦜 AWS CloudFormation🐞 问题🐉 落地方案🦉 Aws vs Aliyun🍄 避坑指南 🐷 背景 由于AWS整体成本略低于阿里云,公司决定将…...

Scrum敏捷认证CSM官方认证班Certified ScrumMaster - CSM认证班
课程简介 Scrum是目前运用最为广泛的敏捷开发方法,是一个轻量级的项目管理和产品研发管理框架,旨在最短时间内交付最大价值。根据2021年全球敏捷状态报告,Scrum及Scrum衍生方法的应用占比达到81%。 在企业的敏捷转型历程中,Scru…...

深度解析qt核心机制:信号槽的多线程行为与对象的线程依附性
对象的线程依附性 每一个学过C以及系统编程的程序员,对于变量会与特定线程有关联都会感到不可思议;在qt中所说的对象的线程依附性,只是针对继承自QObject的对象而言的;对象的线程依附性,并不是代表真的某个底层线程才…...
关于时间格式yyyy-M-d或yyyy-MM-d到yyyy-MM-dd的转换
工作时遇到前端传的时间格式是"2023-12-3 17:41:52",和"2023-1-1 17:41:52"但是我想要的是"2023-12-03 17:41:52"和"2023-01-01 17:41:52"。下面给大家分享几个解决方法 方法一: 找前端!让他改&…...

【Windows】之微软输入法配置小鹤双拼
前言 Windows 自带的输入法微软输入法本身就是个最简洁、最方便的输入法,不需要去安装多余的第三方输入法软件。同时,微软中文拼音输入法支持双拼输入法,但微软自带的双拼输入法不包含小鹤双拼方案的。所以,在这里将会讲解如何配置…...

【AI】使用Jan.ai在本地部署大模型开启AI对话(含通过huggingface下载大模型,实现大模型自由)
文章目录 前言一、Jan.ai是什么?二、下载大模型1. 找到大模型文件地址2. 下载大模型3. 修改model.json文件 三、使用Jan调用大模型进行对话总结 前言 2023年是AIGC元年。以后,每个人多少都会接触到GPT带来的变化。别人都在用,我们也不能落下…...

C++摸版(初阶)----函数模版与类模版
本专栏内容为:C学习专栏,分为初阶和进阶两部分。 通过本专栏的深入学习,你可以了解并掌握C。 💓博主csdn个人主页:小小unicorn ⏩专栏分类:C 🚚代码仓库:小小unicorn的代码仓库&…...
Embedded-Project项目介绍
Embedded-Project项目介绍 Server后端项目后端启动连接数据库启动时可能遇到的问题架构介绍 web前端项目前端启动启动时可能遇到的问题架构介绍 前后端分离开发流程 项目地址: https://github.com/Catxiaobai/Embedded-Project Server后端项目 系统后端项目&#…...

golang 的那些花样
从 A Tour of Go 可以看到一些 Go 比较特殊的点 文章目录 变量声明时,类型放在后面Array 的引用 Slicereceiver 和 argumentbuilt-int特殊接口Error 变量声明时,类型放在后面 var i, j int 1, 2declaration-syntax Array 的引用 Slice slices-intro …...
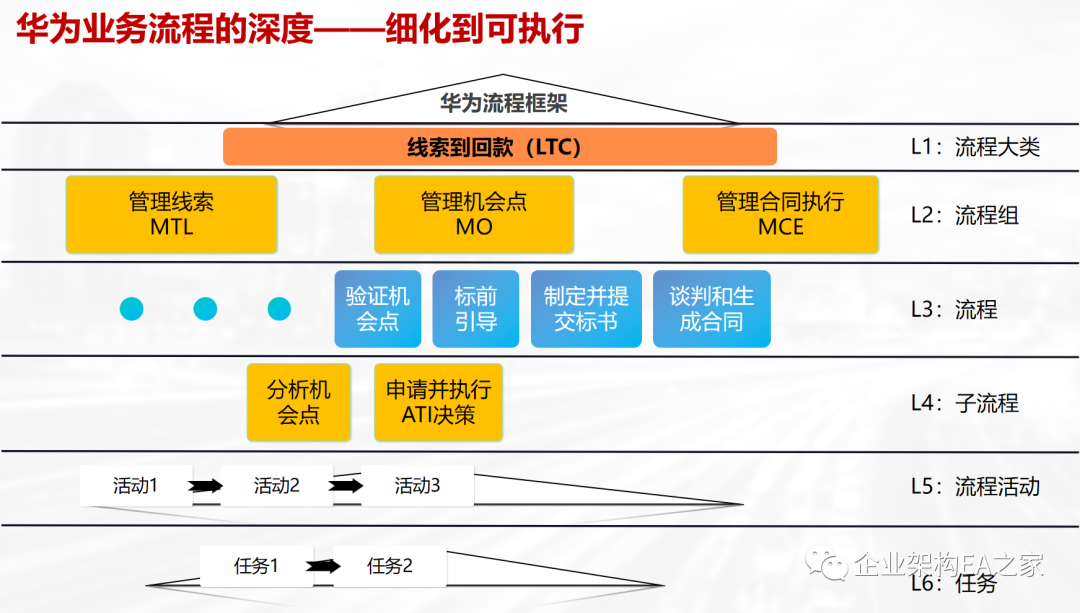
如何设计企业级业务流程?学习华为的流程六级分类经验
业务流程管理(BPM)是一种系统化的方法,用于分析、设计、执行、监控和优化组织的业务流程,以实现预期的目标和价值。业务流程管理中,流程的分级方法有多种,常见的有以下几种: APQC的流程分级方法…...

视频智能分析支持摄像头异常位移检测,监测摄像机异常位移变化,保障监控状态
我们经常在生产场景中会遇到摄像头经过风吹日晒,或者异常的触碰,导致了角度或者位置的变化,这种情况下,如果不及时做出调整,会导致原本的监控条件被破坏,发生事件需要追溯的时候,查不到对应位置…...
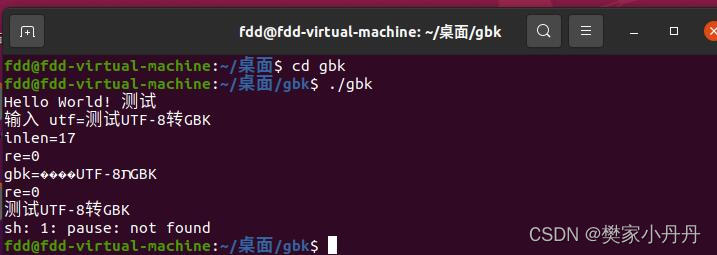
C++ UTF-8与GBK字符的转换 —基于Linux 虚拟机 (iconv_open iconv)
1、UTF-8 和 GBK 的区别 GBK:通常简称 GB (“国标”汉语拼音首字母),GBK 包含全部中文字符。 UTF-8 :是一种国际化的编码方式,包含了世界上大部分的语种文字(简体中文字、繁体中文字、英文、…...

云原生十二问
一、什么是云原生? 云原生是在云计算环境中构建、部署和管理现代应用程序的软件方法。现代企业希望构建高度可扩展、灵活且具有弹性的应用程序,可以快速更新以满足客户需求。为此,他们使用现代工具和技术,这些工具和技术本质上支…...

K8Spod组件
一个pod能包含几个容器 一个pause容器(基础容器/父容器/根容器) 一个或者多个应用容器(业务容器) 通常一个Pod最好只包含一个应用容器,一个应用容器最好也只运行一个业务进程。 同一个Pod里的容器都是运行在同一个node节点上的,并且共享 net、…...

AI原生代码库OpenCode:从代码生成到项目级协同的开发新范式
1. 项目概述:一个面向开发者的AI原生代码库最近在GitHub上看到一个挺有意思的项目,叫opencode-ai/opencode。光看名字,你可能会觉得这又是一个“AI写代码”的工具,或者是一个AI模型的代码仓库。但如果你点进去仔细研究一下&#x…...

轻量级协作平台设计:集成Git与敏捷开发的项目管理实践
1. 项目概述与核心价值最近在团队协作和项目管理工具选型上,又和几个技术负责人聊了一圈。大家普遍的感受是,市面上的工具要么太重,像Jira、Confluence,配置复杂,学习成本高,小团队用起来像“杀鸡用牛刀”&…...

5分钟快速上手:Windows虚拟显示器终极指南,轻松实现多屏扩展
5分钟快速上手:Windows虚拟显示器终极指南,轻松实现多屏扩展 【免费下载链接】parsec-vdd ✨ Perfect virtual display for game streaming 项目地址: https://gitcode.com/gh_mirrors/pa/parsec-vdd 还在为单显示器工作效率低下而烦恼吗…...

Sophia优化器:二阶曲率感知如何加速大模型训练与调参
1. 项目概述:当优化器遇上“二阶”智慧最近在复现一些前沿的论文实验时,我又一次被优化器的选择给卡住了。AdamW虽然稳,但在某些超大规模模型或特定任务上,总觉得收敛速度不够快,调参又是个玄学。就在我对着损失曲线发…...
)
紧急更新!Midjourney 6.6新引入的--chaos=97抽象阈值与表现主义情绪映射关系表(行业首份实测白皮书)
更多请点击: https://intelliparadigm.com 第一章:Midjourney抽象表现主义的范式跃迁 当AI图像生成从具象摹写迈入语义解构与形式重构阶段,Midjourney v6 的提示工程已不再满足于“梵高风格的星空”,而是主动参与抽象表现主义的本…...

陕西省ICPC省赛总结
个人反思 我个人感觉还是练的少,学的不够系统。具体反应到题上,表现在看到题没有思路,并且也不知道这道题用到什么算法思想,导致拿的书和本子几乎用不上。其次是思考不够深入,我的队友都能进行深入的思考,但…...

ElevenLabs希伯来文语音合成:从API调用失败到99.2%自然度达标的7步生产级优化流程
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs希伯来文语音合成:从API调用失败到99.2%自然度达标的7步生产级优化流程 ElevenLabs 官方虽未明确标注希伯来语(he-IL)为“fully supported”,但…...

解锁专业阅读体验:Chrome本地Markdown文件智能渲染解决方案
解锁专业阅读体验:Chrome本地Markdown文件智能渲染解决方案 【免费下载链接】markdownReader markdownReader is a extention for chrome, used for reading markdown file. 项目地址: https://gitcode.com/gh_mirrors/ma/markdownReader 你是否曾经在Chrome…...

解放你的文档下载焦虑:一键保存30+平台内容的神器
解放你的文档下载焦虑:一键保存30平台内容的神器 【免费下载链接】kill-doc 看到经常有小伙伴们需要下载一些免费文档,但是相关网站浏览体验不好各种广告,各种登录验证,需要很多步骤才能下载文档,该脚本就是为了解决您…...

Unity 2019.4.7f1实战:从零复刻Flappy Bird,搞定PC/Web/Android三端发布
Unity 2019.4.7f1实战:从零复刻Flappy Bird,搞定PC/Web/Android三端发布 当你第一次打开Unity时,面对那个空荡荡的3D场景,可能会有些不知所措。但别担心,今天我们就用这个看似简单的Flappy Bird游戏,带你走…...