实验笔记之——基于COLMAP的Instant-NGP与3D Gaussian Splatting的对比
之前博客进行了COLMAP在服务器下的测试
实验笔记之——Linux实现COLMAP-CSDN博客文章浏览阅读794次,点赞24次,收藏6次。学习笔记之——NeRF SLAM(基于神经辐射场的SLAM)-CSDN博客NeRF 所做的任务是 Novel View Synthesis(新视角合成),即在若干已知视角下对场景进行一系列的观测(相机内外参、图像、Pose 等),合成任意新视角下的图像。传统方法中,通常这一任务采用三维重建再渲染的方式实现,NeRF 希望不进行显式的三维重建过程,仅根据内外参直接得到新视角渲染的图像。之前博客跑instant-NGP的时候,除了用官方的数据集,用自己的数据则是通过手机采集,同时获得pose与image。https://blog.csdn.net/gwplovekimi/article/details/135389922?spm=1001.2014.3001.5501而下面两个博客则分别实现了NGP与3DGS
实验笔记之——基于Linux服务器复现Instant-NGP及常用的tmux指令-CSDN博客文章浏览阅读255次,点赞7次,收藏6次。学习笔记之——NeRF SLAM(基于神经辐射场的SLAM)-CSDN博客NeRF 所做的任务是 Novel View Synthesis(新视角合成),即在若干已知视角下对场景进行一系列的观测(相机内外参、图像、Pose 等),合成任意新视角下的图像。传统方法中,通常这一任务采用三维重建再渲染的方式实现,NeRF 希望不进行显式的三维重建过程,仅根据内外参直接得到新视角渲染的图像。配置好后,通过./instant-ngp或者scripts/run.py就可以运行了。这个编译好像比较耗费时间~https://blog.csdn.net/gwplovekimi/article/details/135365847?spm=1001.2014.3001.5501实验笔记之——Gaussian Splatting-CSDN博客文章浏览阅读691次,点赞23次,收藏8次。之前博客对NeRF-SLAM进行了调研学习笔记之——NeRF SLAM(基于神经辐射场的SLAM)-CSDN博客NeRF 所做的任务是 Novel View Synthesis(新视角合成),即在若干已知视角下对场景进行一系列的观测(相机内外参、图像、Pose 等),合成任意新视角下的图像。传统方法中,通常这一任务采用三维重建再渲染的方式实现,NeRF 希望不进行显式的三维重建过程,仅根据内外参直接得到新视角渲染的图像。
https://blog.csdn.net/gwplovekimi/article/details/135349210?spm=1001.2014.3001.5501这两篇博客中,测试public的数据集效果都不错,但是用iphone的record3D录制的要么不能用要么效果很差,为此统一采用COLMAP来计算pose,再次进行测试以及对比两个方法
目录
基于COLMAP的3DGS
基于COLMAP的NGP
3DGS训练好的模型加载进行可视化
基于COLMAP的3DGS
GitHub - graphdeco-inria/gaussian-splatting: Original reference implementation of "3D Gaussian Splatting for Real-Time Radiance Field Rendering"
首先分别运行下面的命令来启动3DGS并可视化其在线训练的过程
conda activate 3DGScd gaussian-splatting/python train.py -s /home/gwp/dataset/30fps下面在MobaXterm下运行conda activate 3DGScd gaussian-splatting/./SIBR_viewers/install/bin/SIBR_remoteGaussian_app训练5分钟左右的结果
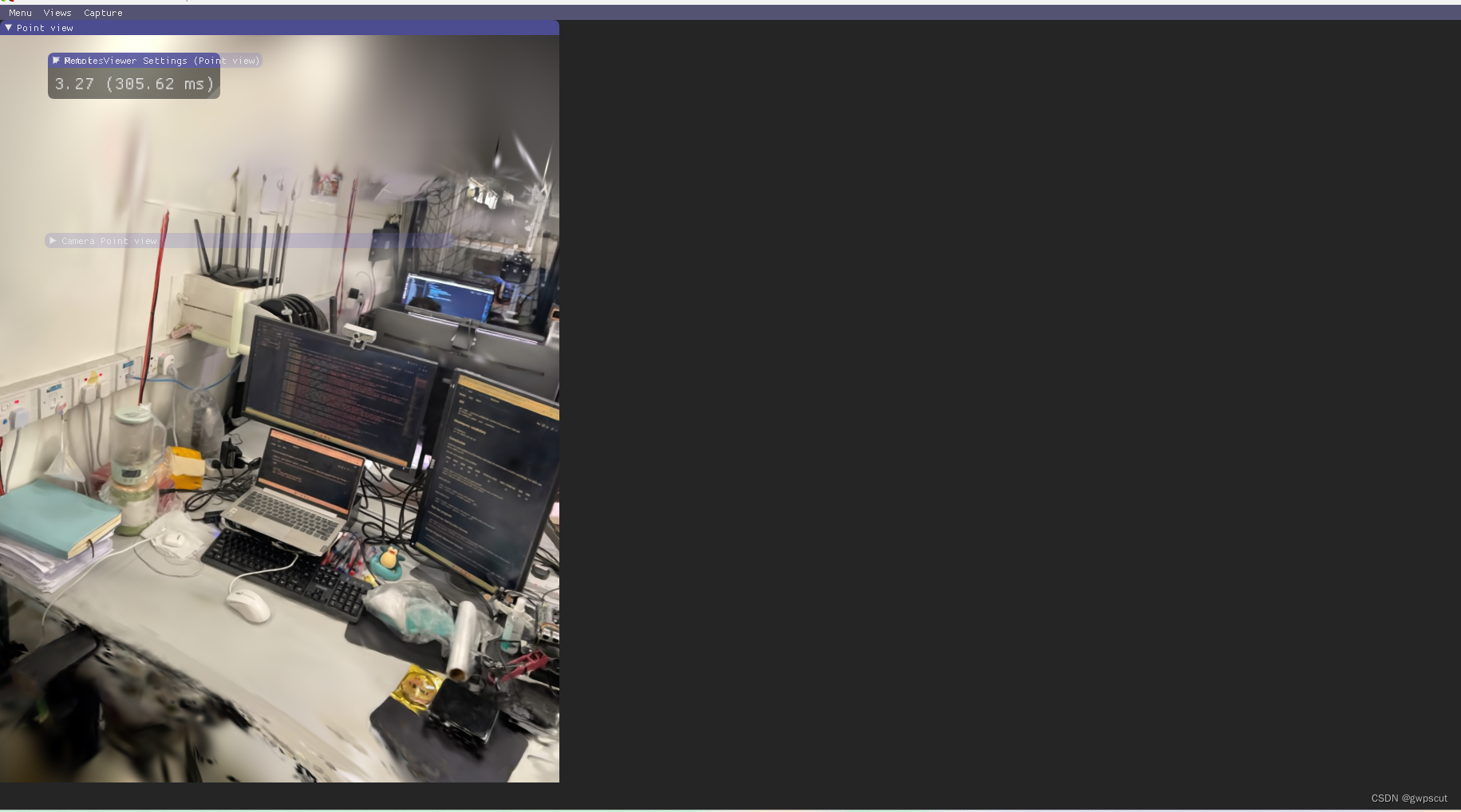
训练过程的各种视角请见下视频
基于COLMAP测试3D Gaussian Splatting(训练过程可视化)
基于COLMAP的NGP
GitHub - NVlabs/instant-ngp: Instant neural graphics primitives: lightning fast NeRF and more
https://github.com/NVlabs/instant-ngp/blob/master/docs/nerf_dataset_tips.md
由于NGP支持的数据格式跟3DGS稍有不同,为此需要进行处理
对于参数“aabb_scale ”,如说明文档所言:
“The aabb_scale parameter is the most important instant-ngp specific parameter. It specifies the extent of the scene, defaulting to 1; that is, the scene is scaled such that the camera positions are at an average distance of 1 unit from the origin. For small synthetic scenes such as the original NeRF dataset, the default aabb_scale of 1 is ideal and leads to fastest training. The NeRF model makes the assumption that the training images can entirely be explained by a scene contained within this bounding box. However, for natural scenes where there is a background that extends beyond this bounding box, the NeRF model will struggle and may hallucinate "floaters" at the boundaries of the box. By setting aabb_scale to a larger power of 2 (up to a maximum of 128), the NeRF model will extend rays to a much larger bounding box. Note that this can impact training speed slightly. If in doubt, for natural scenes, start with an aabb_scale of 128, and subsequently reduce it if possible. The value can be directly edited in the transforms.json output file, without re-running the scripts/colmap2nerf.py script.”
aabb_scale 参数是最重要的 instant-ngp 特定参数。指定场景的范围,默认为1;也就是说,场景被缩放,使得摄像机位置距原点的平均距离为 1 个单位。对于小型合成场景(例如原始 NeRF 数据集),默认的 aabb_scale 1 是理想的,并且可以实现最快的训练。 NeRF 模型假设训练图像可以完全由该边界框内包含的场景来解释。然而,对于背景超出此边界框的自然场景,NeRF 模型将陷入困境,并可能在框的边界处产生“漂浮物”的幻觉。通过将 aabb_scale 设置为更大的 2 次方(最大可达 128),NeRF 模型会将光线扩展到更大的边界框。请注意,这可能会稍微影响训练速度。如果有疑问,对于自然场景,请从 128 的 aabb_scale 开始,然后在可能的情况下减小它。该值可以直接在transforms.json输出文件中编辑,无需重新运行scripts/colmap2nerf.py脚本。
那么此处就先设置为128吧~
data-folder$ python ~/instant-ngp/scripts/colmap2nerf.py --colmap_matcher exhaustive --run_colmap --aabb_scale 128注意图片的文件名字需要是images(当然也可以通过输入参数修改了)

过程感觉跟3DGS中的差不多~也是一样的耗时hhh(记得要开tmux),只是数据格式支持不一样~

不知道为啥生成的transform.json只有2个camera~
改为下面的命令测试则可以了!(添加了--colmap_camera_model SIMPLE_PINHOLE)
data-folder$ python ~/instant-ngp/scripts/colmap2nerf.py --colmap_matcher exhaustive --run_colmap --aabb_scale 32 --colmap_camera_model SIMPLE_PINHOLE
同时用colmap gui也试试

NGP的运行代码如下:
conda activate nerf-ngpcd instant-ngp/./instant-ngp /home/gwp/dataset/30fps_for_ngp/结果如下图所示

虽然渲染久一些效果会有点提升
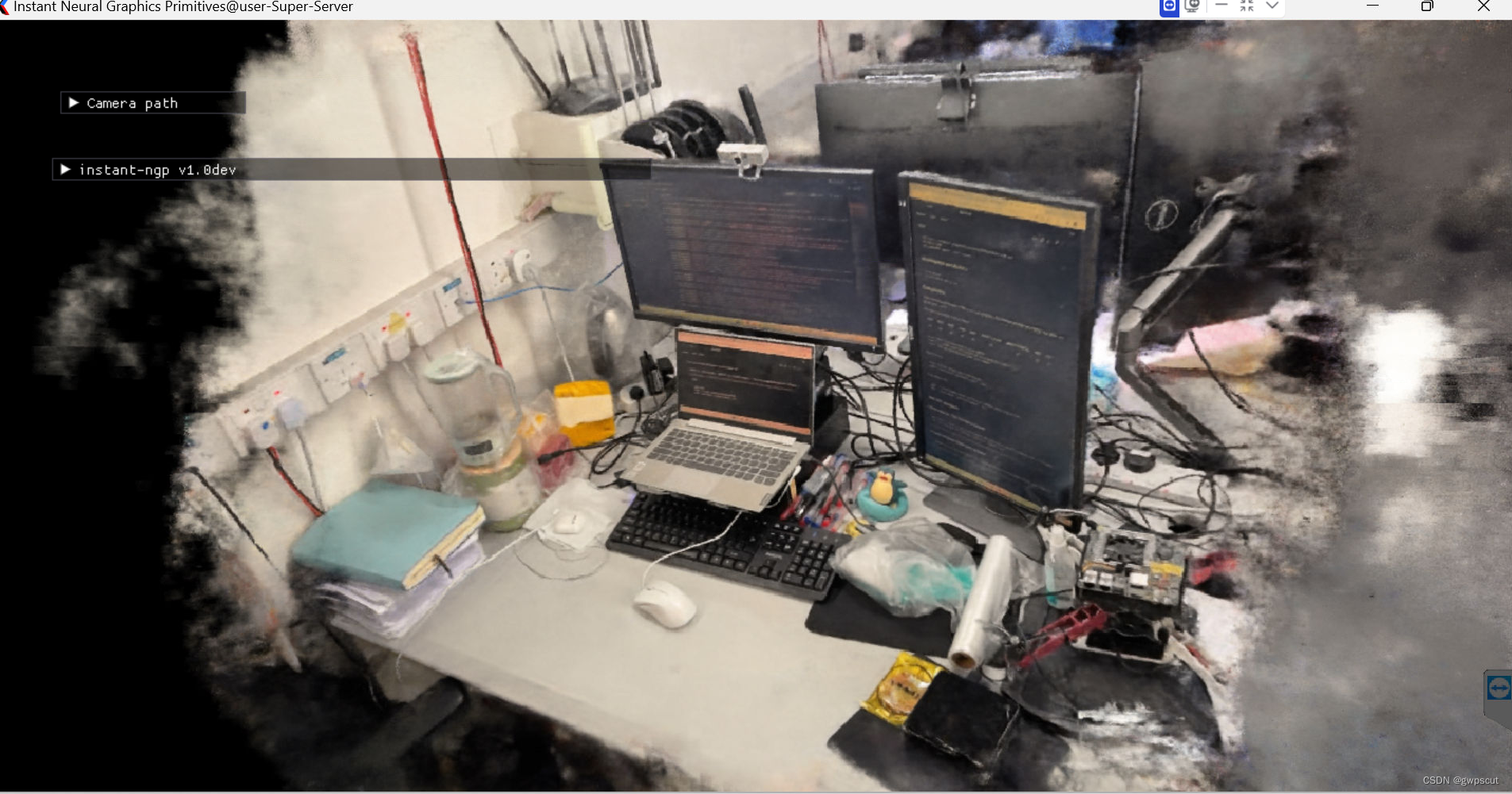
但是这个效果应该是不如3DGS的~(这可能也跟上面提到的aabb_scale有关)
把值从32改为1的效果如下:
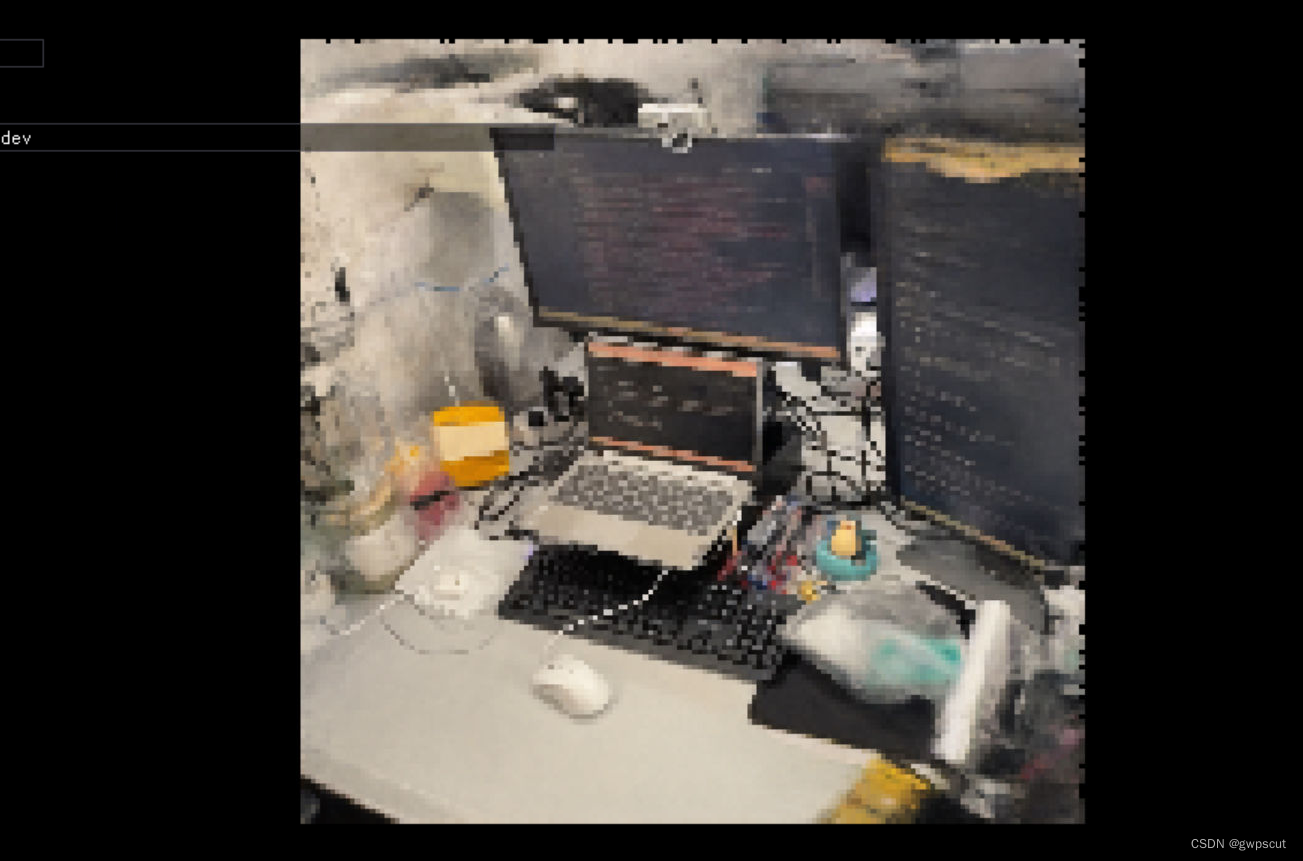
好像更差~那改为128呢?

好像有点提升,但是比起3DGS还是差一些~
渲染的过程可视化如下
基于COLMAP测试Instant-NGP(训练过程可视化)
3DGS训练好的模型加载进行可视化
上面的测试中都是边训练边看效果,此处看看直接训练好开奖的结果吧哈~
如下图所示,大概半个小时左右,训练好了一个3DGS,看着PSNR还挺高的,打算加载看看效果~

平时边训练边看结果的代码如下:
conda activate 3DGScd gaussian-splatting/./SIBR_viewers/install/bin/SIBR_remoteGaussian_app但如果当前没有训练会看到加载的空空如也~
细看gaussian-splatting/的文件组成会发现,它会把训练的结果保存在output中
这个就是当前训练好的模型了。如果要指向某个训练好的模型,应该是
./<SIBR install dir>/bin/SIBR_gaussianViewer_app -m <path to trained model>./SIBR_viewers/install/bin/SIBR_gaussianViewer_app -m "/home/gwp/gaussian-splatting/output/1f6d93f1-5/"效果如下视频所示
基于COLMAP测试3D Gaussian Splatting(训练好的模型)
相关文章:
实验笔记之——基于COLMAP的Instant-NGP与3D Gaussian Splatting的对比
之前博客进行了COLMAP在服务器下的测试 实验笔记之——Linux实现COLMAP-CSDN博客文章浏览阅读794次,点赞24次,收藏6次。学习笔记之——NeRF SLAM(基于神经辐射场的SLAM)-CSDN博客NeRF 所做的任务是 Novel View Synthesis…...
实战环境搭建-linux下安装悟空CRM
下载地址如下: 链接:https://pan.baidu.com/s/1OI9EA8Nc8ymWlERS9i0vjg?pwd=ws5c 提取码:ws5c 上传crm的程序包,如下图: 输入 unzip 72crm-java-master.zip 进行解压 create database crm9; use crm9; source /opt/72crm-java-master/docs/crm9.sql 修改/home/wukongcr…...

Redis 7.0性能大揭秘:如何优化缓存命中率?
Redis 7.0,这货不仅仅是一个简单的缓存工具,它更是一款高性能的数据结构服务器。现在,大家都知道缓存命中率对性能影响特别大,但怎么优化它呢? 本文,已收录于,我的技术网站 ddkk.com࿰…...

【深度学习每日小知识】Data Augmentation 数据增强
数据增强是通过对原始数据进行各种转换和修改来人工生成附加数据的过程,旨在增加机器学习模型中训练数据的大小和多样性。这对于计算机视觉领域尤为重要,因为图像经常被用作输入数据。 计算机视觉中的数据增强 数据增强的主要目标是解决过拟合问题&…...
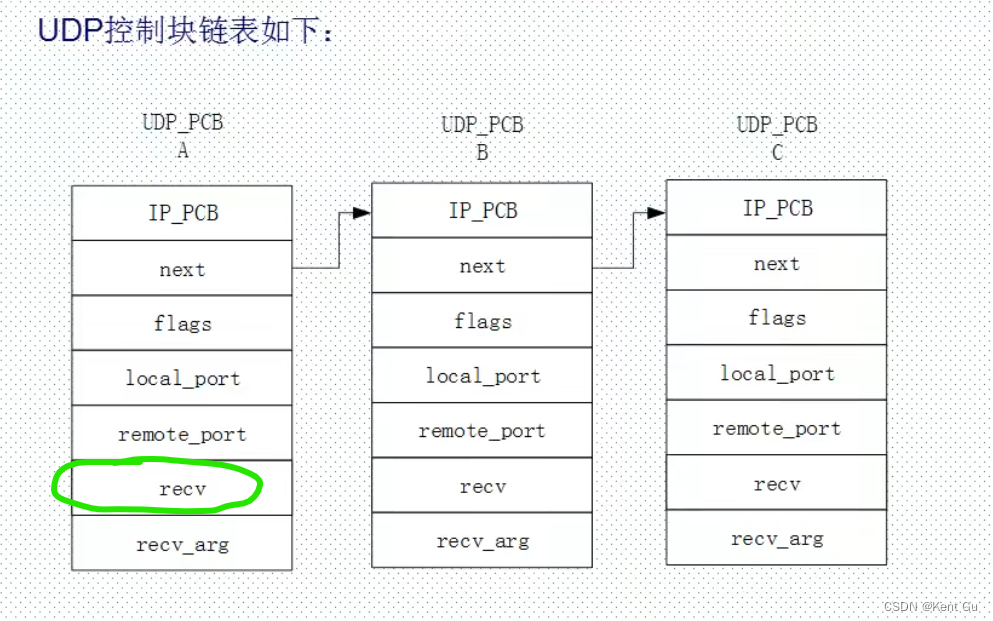
网络调试 UDP1,开发板用动态地址-入门6
https://www.bilibili.com/video/BV1zx411d7eC?p11&vd_source109fb20ee1f39e5212cd7a443a0286c5 1, 开发板连接路由器 1.1,烧录无OS UDP例程 1.2,Mini USB连接电脑 1.3,开发板LAN接口连接路由器 2. Ping开发板与电脑之间通信* 2.1 根据…...
【Gin实战教程】快速入门
Gin是一个轻量级的Web框架,使用Go语言开发。它具有高性能、易用性和灵活性的特点,是构建可扩展的Web应用程序的理想选择。 首先,Gin是一个高性能的框架。它基于Go语言的原生HTTP包进行开发,利用了Go语言的并发特性和协程模型&…...
WPF真入门教程26--项目案例--欧姆龙PLC通讯工具
1、案例介绍 前面已经完成了25篇的文章介绍,概括起来就是从0开始,一步步熟悉了wpf的概念,UI布局控件,资源样式文件的使用,MVVM模式介绍,命令Command等内容,这节来完成一个实际的项目开发&#…...
C++ OpenGL 3D Game Tutorial 2: Making OpenGL 3D Engine学习笔记
视频地址https://www.youtube.com/watch?vPH5kH8h82L8&listPLv8DnRaQOs5-MR-zbP1QUdq5FL0FWqVzg&index3 一、main类 接上一篇内容,main.cpp的内容增加了一些代码,显得严谨一些: #include<OGL3D/Game/OGame.h> #include<i…...

Redis小计(4)
目录 1.Set和Get操作 2.mset和mget 3.mset,mget,set后加参数的优点 4.incr,incrby,incrbyfloat 1.Set和Get操作 flushall:清除所有k-v键值对。(删库跑路小技巧) set k v[ex | px]:设置超时…...
)
【React】常用Hook函数的梳理和总结(第二篇)
1. 前言 本篇梳理和总结React中常用的Hook函数。 欢迎大家来到Hook的世界,真的贼好用~ 2. 常用Hook函数 Hook说明示例useState(initialState) 功能:为函数组件添加状态变量,输入可是基本数据类型或引用数据类型,也可以是不带参数…...
【JaveWeb教程】(15) SpringBootWeb之 响应 详细代码示例讲解
目录 SpringBootWeb请求响应2. 响应2.1 ResponseBody2.2 统一响应结果2.3 案例2.3.1 需求说明2.3.2 准备工作2.3.3 实现步骤2.3.4 代码实现2.3.5 测试2.3.6 问题分析 SpringBootWeb请求响应 2. 响应 前面我们学习过HTTL协议的交互方式:请求响应模式(有…...

「 PyMuPDF专栏 」PyMuPDF为PDF文件添加注释
文章目录 一、PyMuPDF的安装与基本使用1. 安装PyMuPDF库的方法2. 导入PyMuPDF库二、新建PDF文档1. 创建一个空白的PDF文档三、添加注释1. 导入库并打开PDF文件2. 选择要添加注释的页面3. 创建并添加注释3.1. 文本注释3.1.1. 完整代码3.1.2. 注释效果图3.2. 高亮注释3.2.1. 完整…...

5 - 视图|存储过程
视图|存储过程 视图视图基本使用使用视图视图进阶 存储过程创建存储过程存储过程进阶存储过程参数循环结构 视图 视图是虚拟存在的表 表头下的数据在真表里 表头下的数据存储在创建视图时 在select命令访问的真表里 优点: 安全数据独立简单 用户无需关…...

系统学习Python——警告信息的控制模块warnings:警告过滤器-[基础知识]
分类目录:《系统学习Python》总目录 警告过滤器控制着警告是否被忽略、显示或转为错误(触发异常)。 从概念上讲,警告过滤器维护着一个经过排序的过滤器类别列表;任何具体的警告都会依次与列表中的每种过滤器进行匹配&…...

vue中高德地图使用
1、安装 npm i amap/amap-jsapi-loader --save2、封装地图组件 <template><div id"map" ref"mapcontainer"></div> </template><script> import AMapLoader from "amap/amap-jsapi-loader"; export default {befo…...

算法训练营Day33
#Java #贪心 开源学习资料 Feeling and experiences: 单调递增的数字:力扣题目链接 当且仅当每个相邻位数上的数字 x 和 y 满足 x < y 时,我们称这个整数是单调递增的。 给定一个整数 n ,返回 小于或等于 n 的最大数字&am…...

.net6解除文件上传限制。Multipart body length limit 16384 exceeded
在C#中上传文件时如果不修改默认文件的上传大小会提示Multipart body length limit 16384 exceeded这个错误提示表明你的请求中的Multipart body长度超过了16384字节的限制。这通常意味着你正在尝试发送一个太大的请求体,可能是因为包含了太多数据或者太大的文件。要…...

电子电器架构网络演化 —— 车载以太网TSN
电子电器架构网络演化 —— 车载以太网TSN 我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。 老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师: 屏蔽力是信息过载时代一个人的特殊竞争力,任何消…...

智能门锁触控工作原理中应用的电容式触摸芯片
智能门锁的识别技术中,密码几乎成为标配功能。相比机械按键的触控方式,电容式触控方式可以在加上一层玻璃甚至金属一体成型之后与用户进行交互,由于进行了物理性隔离,使得外壳更具完整性,物理上安全性更佳。电容式触控…...
)
Spark 中 BroadCast 导致的内存溢出(SparkFatalException)
背景 本文基于 Spark 3.1.1 open-jdk-1.8.0.352目前在排查 Spark 任务的时候,遇到了一个很奇怪的问题,在此记录一下。 现象描述 一个 Spark Application, Driver端的内存为 5GB,一直以来都是能正常调度运行,突然有一天,报…...

VisualCppRedist AIO:一站式高效解决Windows运行库依赖问题
VisualCppRedist AIO:一站式高效解决Windows运行库依赖问题 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist VisualCppRedist AIO是一个专门为Windows…...

别再只会暴力破解!CTF密码学题中的那些‘送分’套路与高效工具盘点
CTF密码学解题:从特征识别到精准打击的高效方法论 在CTF竞赛中,密码学题目往往被参赛者视为"送分题",但现实情况却是许多队伍在这些看似简单的题目上浪费大量时间。真正高效的解题者与普通选手的区别,往往在于对题目特…...

深入Nachos文件系统:我是如何修复‘文件无法追加写入’这个经典Bug的
深入Nachos文件系统:我是如何修复‘文件无法追加写入’这个经典Bug的 1. 问题定位与背景分析 第一次在Nachos文件系统中尝试追加写入文件时,我遇到了一个令人困惑的现象:无论怎么操作,文件内容都无法正确扩展。这个看似简单的功能…...

别再用Excel手算了!用Python脚本快速搞定Zemax连续变焦镜头初始结构计算
别再用Excel手算了!用Python脚本快速搞定Zemax连续变焦镜头初始结构计算 光学设计工程师们,你们是否还在为连续变焦镜头的初始结构计算而头疼?每次手动调整变倍组和补偿组的位置,反复在Excel中敲打公式,结果却总是差强…...

从零搭建私有化大语言模型服务器:Ollama、Docker与Open WebUI全栈指南
1. 项目概述:构建你自己的私有化大语言模型服务器如果你和我一样,对把个人数据交给云端AI服务商这件事始终心存疑虑,同时又渴望拥有一个功能完整、响应迅速、且完全掌控在自己手中的AI助手,那么搭建一个本地私有化的大语言模型&am…...

终极鼠标革命:如何用Mac Mouse Fix让你的普通鼠标超越苹果触控板体验
终极鼠标革命:如何用Mac Mouse Fix让你的普通鼠标超越苹果触控板体验 【免费下载链接】mac-mouse-fix Mac Mouse Fix - Make Your $10 Mouse Better Than an Apple Trackpad! 项目地址: https://gitcode.com/GitHub_Trending/ma/mac-mouse-fix 还在为macOS上…...

3个步骤解决经典游戏无法联网:IPXWrapper终极兼容方案
3个步骤解决经典游戏无法联网:IPXWrapper终极兼容方案 【免费下载链接】ipxwrapper 项目地址: https://gitcode.com/gh_mirrors/ip/ipxwrapper 你是否曾在Windows 10或11系统上试图重温《红色警戒2》、《帝国时代》或《星际争霸》的局域网对战,却…...

终极分屏神器Nucleus Co-Op:一台电脑实现4人同时开黑完整指南
终极分屏神器Nucleus Co-Op:一台电脑实现4人同时开黑完整指南 【免费下载链接】nucleuscoop Starts multiple instances of a game for split-screen multiplayer gaming! 项目地址: https://gitcode.com/gh_mirrors/nu/nucleuscoop 你是否曾因朋友聚会时电脑…...

开发者技能日志工具:用CLI与SQLite构建个人技术成长追踪系统
1. 项目概述:一个技能日志记录器的诞生 最近在整理自己的技术栈和项目经验时,我遇到了一个很多开发者都有的痛点:学了那么多东西,做了那么多项目,但真要写简历或者回顾成长路径时,记忆总是模糊的。今天学了…...

TTS推理优化:低精度计算与硬件协同设计实践
1. 项目概述:TTS推理的经济学重构在语音技术领域,文本转语音(TTS)系统正从实验室走向生产环境,成为智能助手、无障碍工具和实时通信系统的核心组件。与大型语言模型(LLM)不同,TTS需要…...