ROS2学习笔记一:安装及测试
目录
前言
1 ROS2安装与卸载
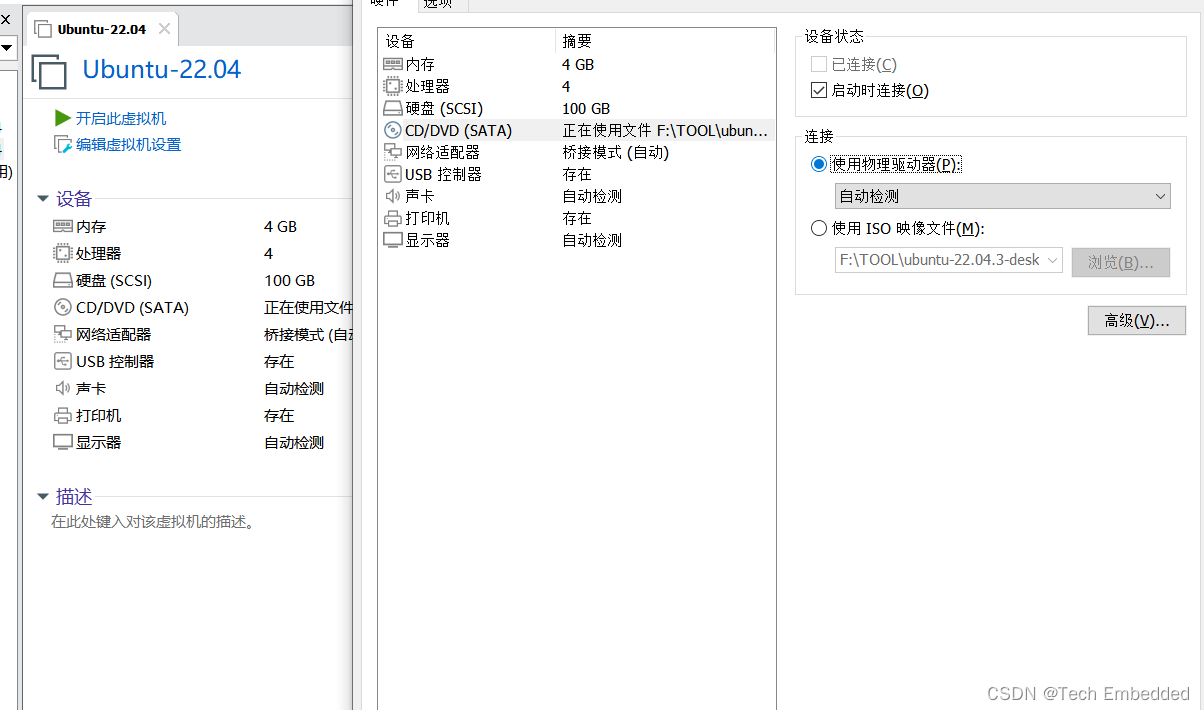
1.1 安装虚拟机
1.2 ROS2 humble安装
2 ROS2测试
2.1 topic测试
2.2 小海龟测试
2.3 RQT可视化
2.4 占用空间
前言
ROS2的前身是ROS,ROS即机器人操作系统(Robot Operating System),ROS为了“提高机器人软件复用率”的目标,时至今日,ROS已经广泛用于各种机器人的开发,无论是机械臂、移动机器人、水下机器人,还是人形机器人、复合机器人,统统都可以看到ROS的身影,ROS已经成为机器人领域的普遍标准。但是由于ROS自身的缺陷,如果在工业场景应用(例如无人驾驶)还需要做优化和定制,
ROS无法真正进入产业界,也自然无法产品化。为了解决这一问题,社区提出了ROS 2。使得ROS具备产品化的特性,包括实时性、适应于全平台、适用于性能低的硬件(MCU+RTOS)、分布式、数据加密和现代编程语言的支持。
1 ROS2安装与卸载
1.1 安装虚拟机
- 安装VMvare
- 安装Ubuntu22.04LTS
ubuntu下载地址:Ubuntu PC operating system | Ubuntu
1.2 ROS2 humble安装
设置语言环境
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8添加源
sudo apt update && sudo apt install curl gnupg lsb-release
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null安装ros2 humble版本
sudo apt update && sudo apt upgrade
sudo apt install ros-humble-desktop设置ros2环境变量
source /opt/ros/humble/setup.bash
echo " source /opt/ros/humble/setup.bash" >> ~/.bashrc ros2安装目录:安装目录在/opt/ros/humble下。
2 ROS2测试
2.1 topic测试
启动第一个终端,通过以下命令启动一个数据的发布者节点:
ros2 run demo_nodes_cpp talker
启动第二个终端,通过以下命令启动一个数据的订阅者节点:
ros2 run demo_nodes_py listener如果“Hello World”字符串在两个终端中正常传输,说明通信系统没有问题。
2.2 小海龟测试
启动第一个终端,通过以下命令启动一个数据的发布者节点:
ros2 run turtlesim turtlesim_node启动第二个终端,通过以下命令启动一个数据的订阅者节点:
ros2 run turtlesim turtle_teleop_key第一句指令将启动一个蓝色背景的海龟仿真器,第二句指令将启动一个键盘控制节点,在该终端中点击键盘上的“上下左右”按键控制小海龟运动。

2.3 RQT可视化
保持前面两个游戏在运行状态,打开终端,输入rqt。
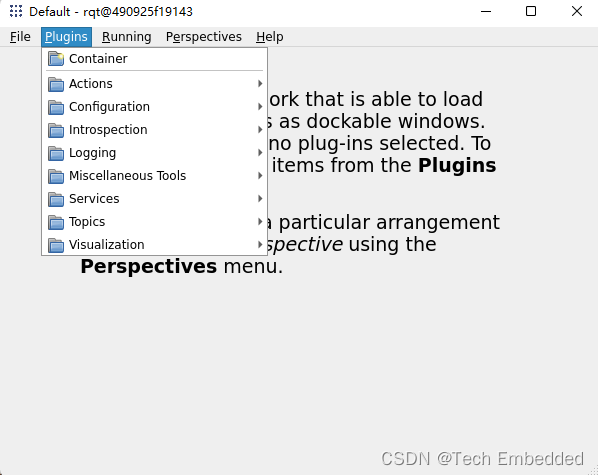
选择插件,这里我们可以选择现有的几个RQT插件来试一试,可以看到和话题、参数、服务、动作四大通信组件相关的工具都有,还有一些可视化、日志和系统计算图等相关的。
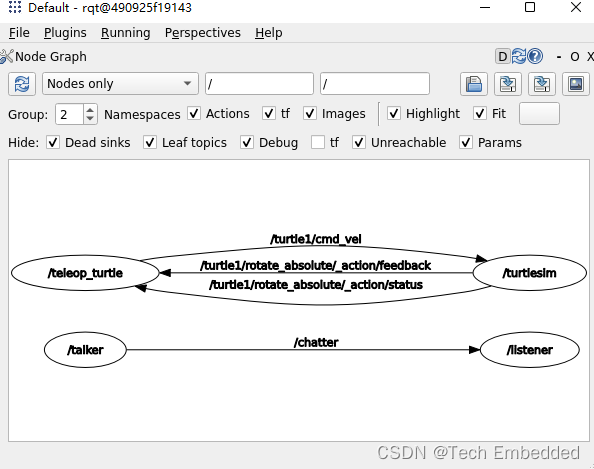
选择Introspection / Node Graph,打开后就可以看到上面几个节点之间的数据关系了,是不是很方便的工具。
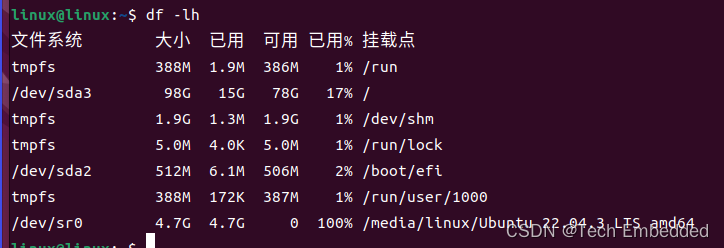
2.4 占用空间
ubuntu安装前大小,默认最小化安装

ubuntu安装后大小
2.5 ROS2卸载
sudo apt remove ros-humble-*
sudo apt autoremove相关文章:
ROS2学习笔记一:安装及测试
目录 前言 1 ROS2安装与卸载 1.1 安装虚拟机 1.2 ROS2 humble安装 2 ROS2测试 2.1 topic测试 2.2 小海龟测试 2.3 RQT可视化 2.4 占用空间 前言 ROS2的前身是ROS,ROS即机器人操作系统(Robot Operating System),ROS为了“提高机器人…...

Xcode14.3.1真机调试iOS17的方法
Hello,大家好我是咕噜铁蛋!Xcode 是苹果官方开发工具,它提供了完整的开发环境和工具集,支持开发 iOS、macOS、watchOS 和 tvOS 应用程序。对于 iOS 开发者来说,Xcode 是必备的工具之一。而随着 iOS 系统的不断更新和升…...
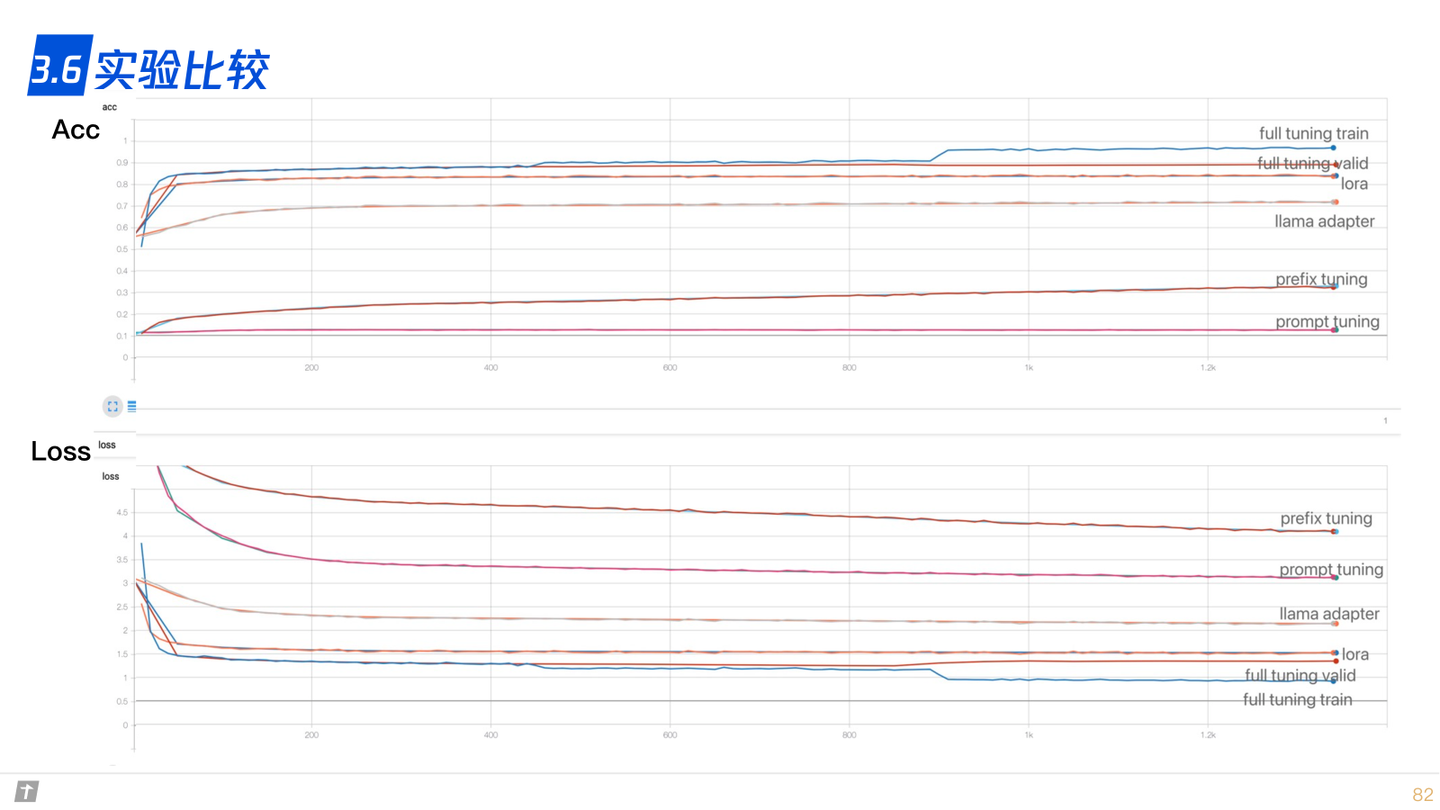
主流大语言模型从预训练到微调的技术原理
引言 本文设计的内容主要包含以下几个方面: 比较 LLaMA、ChatGLM、Falcon 等大语言模型的细节:tokenizer、位置编码、Layer Normalization、激活函数等。大语言模型的分布式训练技术:数据并行、张量模型并行、流水线并行、3D 并行、零冗余优…...

Linux中vim查看文件某内容
一、编辑文件命令 [rootyinheqilin ~]# vim test.txt 1,在编辑的文件中连续按2次键盘的【g】键,光标会移动到文档开头第一行 2,输入一个大写 G,光标会跳转到文件的最后一行第一列(末行) 二、查看文件内容命令 gre…...
)
阿里云提示服务器ip暴露该怎么办?-速盾网络(sudun)
当阿里云提示服务器IP暴露的时候,这意味着您的服务器可能面临安全风险,因为黑客可以通过知道服务器的IP地址来尝试入侵您的系统。在这种情况下,您应该立即采取措施来保护您的服务器和数据。以下是一些建议: 更改服务器IP地址&…...
IP地址的网络安全防护和预防
网络安全对于保护个人和组织的信息资产至关重要,而IP地址是网络通信的基础。在这篇文章中,IP数据云将探讨IP地址的网络安全防护和预防措施,以确保网络的安全性和可靠性。 IP地址是互联网上每个设备在网络中的唯一标识符。有IPv4和IPv6两种类…...

数据挖掘在制造业中的预测与优化应用
随着大数据时代的到来,数据挖掘技术在各行各业的应用日益广泛,尤其在制造业中,其对于提升生产效率、降低运营成本、优化供应链管理等方面发挥着不可替代的作用。本文将探讨数据挖掘在制造业中的预测与优化应用,通过深入剖析实际案…...
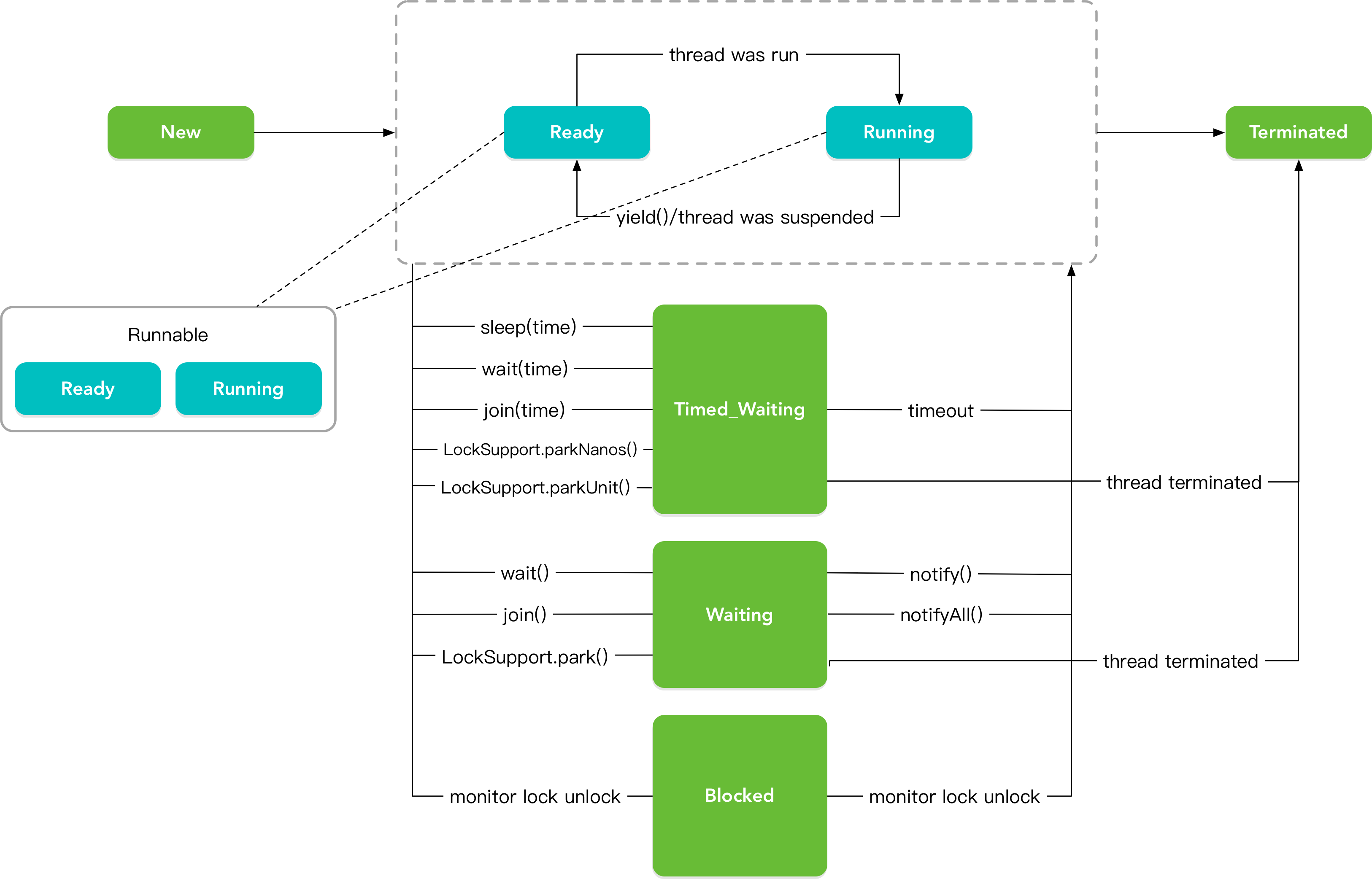
Java面试之并发篇(一)
1、前言 本篇主要总结JAVA面试中关于并发相关的高频面试题。本篇的面试题基于网络整理,和自己编辑。在不断的完善补充哦。 2、简述程序、进程、线程、的基本概念? 2.1、程序 程序,是含有指令和数据的文件,被存储在磁盘或其他的…...

分布式全局id
分布式全局id snowflake 算法是 twitter 开源的分布式 id 生成算法,采用 Scala 语言实现,是把一个 64 位的 long 型的 id,1 个 bit 是不用的,用其中的 41 bits 作为毫秒数,用 10 bits 作为工作机器 id,12 …...
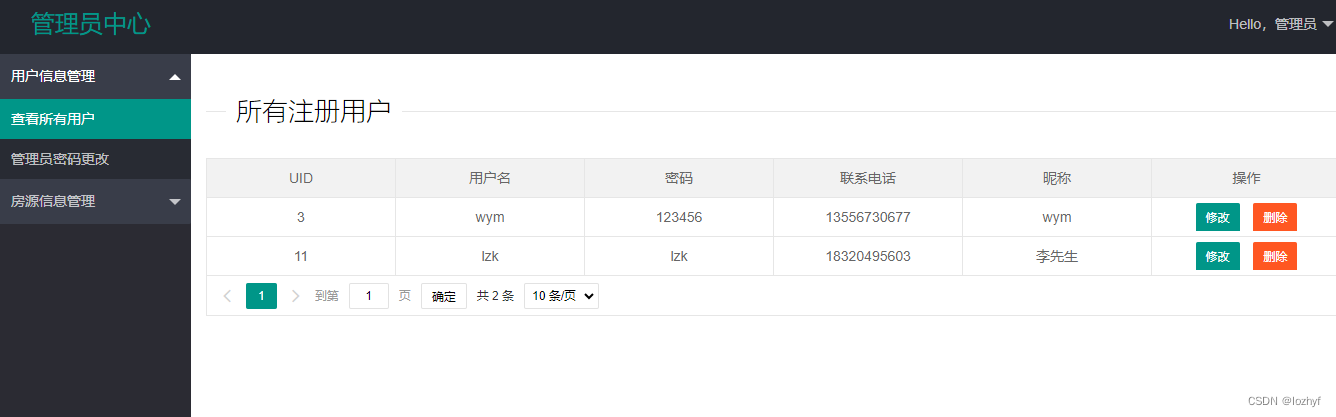
springboot 房屋租赁系统
spring boot mysql mybatis 前台后端...

TypeScript接口、对象
目录 1、TypeScript 接口 1.1、实例 1.2、联合类型和接口 1.3、接口和数组 1.4、接口和继承 1.5、单继承实例 1.6、多继承实例 2、TypeScript 对象 2.2、对象实例 2.3、TypeScript类型模板 2.4、鸭子类型(Duck typing) 1、TypeScript 接口 接口…...
Flask 菜品管理
common/libs/Helper.py getDictFilterField() 方法 用于在web/templates/food/index.html中展示菜品分类 如何能够通过food里面的cat_id获取分类信息呢?只能通过for循环,这样会很麻烦,所以定义了这个方法。 这个方法可以的查询返回结果…...
亚马逊实时 AI 编程助手 CodeWhisperer使用体验
文章目录 1:什么是CodeWhisperer ?2:试用3:上手体验 1:什么是CodeWhisperer ? 最近ChatGPT展现出强大AI能力给我们带来了深刻的影响,AI现在不是一个概念,基于AI的产品一定在各行各业…...

[机缘参悟-123] :实修 - 东西方各种思想流派实修的要旨与比较?
目录 前言: 一、东方各种思想流派实修的要旨? 1.1 儒、释、道、法的主要思想 1.2 儒、释、道、法各种追求的目标 1.3 儒、释、道、法各自修行的法门或修行的途径 二、西方灵修的各种派别的要旨? 2.0 西方灵修的各种派别 2.1 玛雅星系…...

基于51单片机的数字时钟系统设计
标题:基于51单片机的数字时钟系统设计与实现 摘要: 本文详细介绍了基于STC89C51单片机设计一款具有精确计时功能的数字时钟系统的全过程。该系统利用了单片机内部的定时器/计数器资源,结合液晶显示屏和按键输入模块,实现了时间显…...

《每天十分钟》-红宝书第4版-基本引用类型
引用值(或者对象)是某个特定引用类型的实例。在 ECMAScript 中,引用类型是把数据和功能组织到一起的结构,经常被人错误地称作“类”。虽然从技术上JavaScript 是一门面向对象语言,但ECMAScript 缺少传统的面向对象编程…...
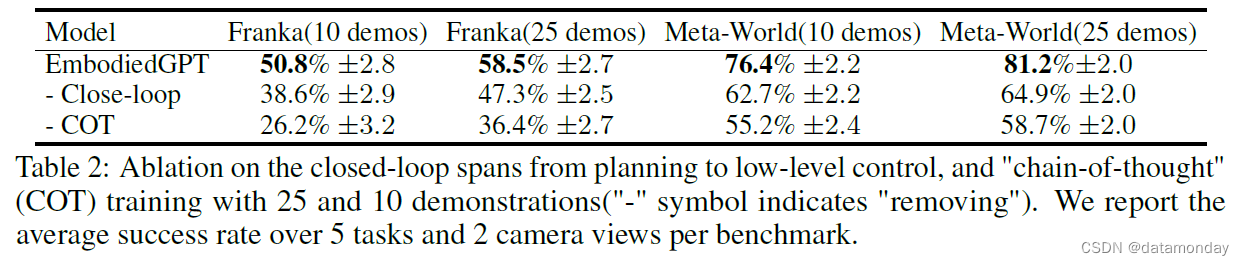
【EAI 005】EmbodiedGPT:通过具身思维链进行视觉语言预训练的具身智能大模型
论文描述:EmbodiedGPT: Vision-Language Pre-Training via Embodied Chain of Thought 论文作者:Yao Mu, Qinglong Zhang, Mengkang Hu, Wenhai Wang, Mingyu Ding, Jun Jin, Bin Wang, Jifeng Dai, Yu Qiao, Ping Luo 作者单位:The Universi…...

一文读懂「Chain of Thought,CoT」思维链
前言: 思维链,在人工智能领域,是一个非常非常新的概念。强大的逻辑推理是大语言模型“智能涌现”出的核心能力之一,好像AI有了人的意识一样。而推理能力的关键在于——思维链(Chain of Thought,CoT)。 相关概念: 语言智能可以被理解为“使用基于自然语言的概念对经验事…...
杨中科 ASP.NET Core 中的依赖注入的使用
ASP.NET CORE中服务注入的地方 1、在ASP.NET Core项目中一般不需要自己创建ServiceCollection、IServiceProvider。在Program.cs的builder.Build()之前向builderServices中注入 2、在Controller中可以通过构造方法注入服 务。 3、演示 新建一个calculator类 注入 新建TestC…...

Spring Boot 和 Spring 有什么区别
Spring Boot 和 Spring 是两个不同的概念,它们服务于不同的目的,但它们之间有着紧密的联系。下面是它们之间的主要区别: 目的和定位: Spring:Spring 是一个开源的 Java 平台,它最初由 Rod Johnson 创建&am…...
;应用:数据补全、插值))
【Matlab】MATLAB教程:数据插值interp1(案例:interp1(x,y,xi,‘linear‘);应用:数据补全、插值)
MATLAB教程:数据插值interp1(案例:interp1(x,y,xi,linear);应用:数据补全、插值) 在科研实验、工程监测、信号采集等各类数据获取场景中,受限于设备精度、测试条件、环境干扰等因素,采集到的原始数据往往存在**数据点稀疏、采样间隔不均、局部数据缺失**等问题,直接使…...

手把手教你用LVGL特殊符号打造炫酷UI界面
手把手教你用LVGL特殊符号打造炫酷UI界面 在嵌入式设备开发中,UI设计往往面临资源受限的挑战。LVGL(Light and Versatile Graphics Library)作为一款轻量级开源图形库,通过其丰富的特殊符号系统,让开发者能够在有限资…...

2026 工程指南:为什么 AWS Bedrock + Claude 4.6 正在成为多 Agent 协作的底层首选?
进入 2026 年第一季度,大模型领域的竞争已经从“单纯的参数规模”转向了“端到端的工程效率”。随着 GPT-5.4 陷入推理成本高企的泥潭,Anthropic 联手亚马逊发布的 Claude 4.6 托管方案,正在通过 Amazon Bedrock 平台迅速收割企业级市场。作为…...

MoveIt Config 配置文件完整一致性检查
检查范围(全部核对完毕)ros2_control xacro(硬件接口 / 关节)initial_positions.yaml(初始位置)srdf(运动组 / 关节)joint_limits.yaml(关节限制)kinematics.…...

MATPOWER电力系统仿真实践手册:从安装到应用的全面指南
MATPOWER电力系统仿真实践手册:从安装到应用的全面指南 【免费下载链接】matpower MATPOWER – steady state power flow simulation and optimization for MATLAB and Octave 项目地址: https://gitcode.com/gh_mirrors/ma/matpower MATPOWER是一款专为MATL…...

【收藏干货】IndexRAG:离线生成桥接事实,实现单次检索的多跳推理
plaintext IndexRAG: Bridging Facts for Cross-Document Reasoning at Index Timehttps://arxiv.org/pdf/2603.16415 ### 一、多跳QA的困境多跳问答(Multi-hop QA)要求模型跨越多篇文档进行推理,比如回答"电影Aylwin的导演出生在哪里&q…...

别再死记硬背了!用Python脚本+Modbus Poll工具,5分钟搞懂Modbus功能码怎么用
用PythonModbus Poll实战:5分钟解锁功能码核心逻辑 第一次接触Modbus协议时,那些晦涩的功能码总让我头疼——01H、03H、05H这些十六进制代码就像天书,文档里的理论描述看完就忘。直到我发现用Python脚本配合Modbus Poll工具进行实操测试&…...
)
哲学家吃饭问题没搞懂?用Python模拟信号量帮你彻底理解进程同步(附可运行代码)
用Python动态模拟哲学家进餐问题:从死锁到解决方案的完整实践指南 在操作系统的学习中,哲学家进餐问题堪称进程同步与死锁的"经典案例"。这个看似简单的场景却蕴含着并发编程中最棘手的挑战——如何协调多个进程对有限资源的访问。本文将带你…...

如何快速找到领域内的核心论文?3 条最有效路径
在做科研文献检索时,很多研究者都会遇到同一个问题: 文献很多,但不知道哪些最重要。例如,当你在数据库中输入一个研究关键词时,检索结果可能会出现几百篇甚至上千篇论文。面对如此庞大的文献数量,很多人会产…...

【C++】三大图像加载库实战对比:libpng、FreeImage与stb_image的选型指南
1. 为什么需要图像加载库? 在C项目中处理图像文件时,直接操作二进制数据就像用螺丝刀吃牛排——理论上可行,但实际体验极其糟糕。图像加载库就是帮我们解决这个问题的餐具套装。以最常见的PNG文件为例,它可能包含调色板、压缩数据…...