Apollo计算几何算法(一)
Planning模块,路径和速度曲线抽象成折线(Polyline),障碍物抽象成多边形(Polygon)。在碰撞检测、投影计算距离、平滑曲线等方面应用广泛。
1 几何算法
1.1 线段
moudles/common/math/line_segment2d.h
namespace apollo {
namespace common {
namespace math {
// 平面线段
class LineSegment2d {public:LineSegment2d();LineSegment2d(const Vec2d &start, const Vec2d &end);// 获取线段的起点const Vec2d &start() const { return start_; }// 获取线段的终点const Vec2d &end() const { return end_; }// 获取从起点到终点的方向const Vec2d &unit_direction() const { return unit_direction_; }// 获取线段的中心Vec2d center() const { return (start_ + end_) / 2.0; }// 旋转线段的终点Vec2d rotate(const double angle);// 返回线段的航向double heading() const { return heading_; }// cos(heading_)double cos_heading() const { return unit_direction_.x(); }// sin(heading_)double sin_heading() const { return unit_direction_.y(); }// 获取线段的长度double length() const;// 获取线段长度的平方double length_sqr() const;/*** @brief Compute the shortest distance from a point on the line segment* to a point in 2-D.* @param point The point to compute the distance to.* @return The shortest distance from points on the line segment to point.*/// 计算线段上的点到2-D中的点的最短距离。double DistanceTo(const Vec2d &point) const;/*** @brief 计算线段上一点到二维中一点的最短距离,得到线段上最近的点* @param point The point to compute the distance to.* @param nearest_pt The nearest point on the line segment* to the input point.* @return 线段上的点到输入点的最短距离*/double DistanceTo(const Vec2d &point, Vec2d *const nearest_pt) const;// 计算线段上的一点到2-D中的一点的最短距离的平方double DistanceSquareTo(const Vec2d &point) const;// 计算二维中线段上一点到一点的最短距离的平方,得到线段上最近的点。double DistanceSquareTo(const Vec2d &point, Vec2d *const nearest_pt) const;/*** @brief 检查一个点是否在线段内* @param point 检查它是否在线段内的点* @return 输入点是否在线段内*/bool IsPointIn(const Vec2d &point) const;// 检查该线段是否与二维中的另一条线段相交bool HasIntersect(const LineSegment2d &other_segment) const;// 计算与二维中另一条线段的交点(如果有的话)bool GetIntersect(const LineSegment2d &other_segment,Vec2d *const point) const;// 计算矢量在线段上的投影double ProjectOntoUnit(const Vec2d &point) const;// 计算向量与线段的叉积double ProductOntoUnit(const Vec2d &point) const;// 计算从线段展开的直线上的二维点的垂直脚部double GetPerpendicularFoot(const Vec2d &point,Vec2d *const foot_point) const;// 获取包含基本信息的调试字符串std::string DebugString() const;private:Vec2d start_;Vec2d end_;Vec2d unit_direction_;double heading_ = 0.0;double length_ = 0.0;
};} // namespace math
} // namespace common
} // namespace apollomoudles/common/math/line_segment2d.cc
计算点到直线的距离
double LineSegment2d::DistanceTo(const Vec2d &point) const {// 如果线段的长度小于等于一个阈值kMathEpsilon,那么点一定在线段上,直接返回点与线段起点的距离if (length_ <= kMathEpsilon) {return point.DistanceTo(start_);}const double x0 = point.x() - start_.x();const double y0 = point.y() - start_.y();// proj,表示点在方向向量上的投影const double proj = x0 * unit_direction_.x() + y0 * unit_direction_.y();// 如果投影小于等于0,说明点在直线段的同侧,直接返回点到线段起点的距离if (proj <= 0.0) {return hypot(x0, y0);}// 如果投影大于等于线段长度,说明点在直线段的延长线上,直接返回点到线段终点的距离if (proj >= length_) {return point.DistanceTo(end_);}return std::abs(x0 * unit_direction_.y() - y0 * unit_direction_.x());
}
给定一个点,计算到线段的最短距离,同时返回最近的点(过给定点的垂线与原线段的交点,或者线段的端点)
double LineSegment2d::DistanceTo(const Vec2d &point,Vec2d *const nearest_pt) const {// 检查nearest_pt是否为空CHECK_NOTNULL(nearest_pt);// 如果线段的长度小于等于一个阈值kMathEpsilon,那么点一定在线段上,直接返回点与线段起点的距离if (length_ <= kMathEpsilon) {*nearest_pt = start_;return point.DistanceTo(start_);}// 计算点与线段起点的坐标差x0和y0const double x0 = point.x() - start_.x();const double y0 = point.y() - start_.y();// 计算proj,表示点在方向向量上的投影const double proj = x0 * unit_direction_.x() + y0 * unit_direction_.y();// 如果投影小于等于0,说明点在直线段的同侧,直接返回点到线段起点的距离。如果投影大于等于线段长度,说明点在直线段的延长线上,直接返回点到线段终点的距离if (proj < 0.0) {*nearest_pt = start_;return hypot(x0, y0);}if (proj > length_) {*nearest_pt = end_;return point.DistanceTo(end_);}*nearest_pt = start_ + unit_direction_ * proj;// 计算点到线段的垂线与x轴正半轴的夹角,即x0 * unit_direction_.y() - y0 * unit_direction_.x(),取绝对值作为最终结果return std::abs(x0 * unit_direction_.y() - y0 * unit_direction_.x());
}
rotate:逆时针旋转angle度(注意是弧度)
Vec2d LineSegment2d::rotate(const double angle) {Vec2d diff_vec = end_ - start_;diff_vec.SelfRotate(angle);return start_ + diff_vec;
}
GetPerpendicularFoot:某个点到该线段垂点的距离
double LineSegment2d::GetPerpendicularFoot(const Vec2d &point,Vec2d *const foot_point) const {CHECK_NOTNULL(foot_point);if (length_ <= kMathEpsilon) {*foot_point = start_;return point.DistanceTo(start_);}const double x0 = point.x() - start_.x();const double y0 = point.y() - start_.y();const double proj = x0 * unit_direction_.x() + y0 * unit_direction_.y();*foot_point = start_ + unit_direction_ * proj;return std::abs(x0 * unit_direction_.y() - y0 * unit_direction_.x());
}
1.2 包围盒
二维平面上,Box特指矩形包围盒。Planning模块经常将自车和障碍物抽象成一个矩形框,简化计算
bounding box
Box2d:普通矩形包围盒
文件路径:modules/common/math/box2d.h
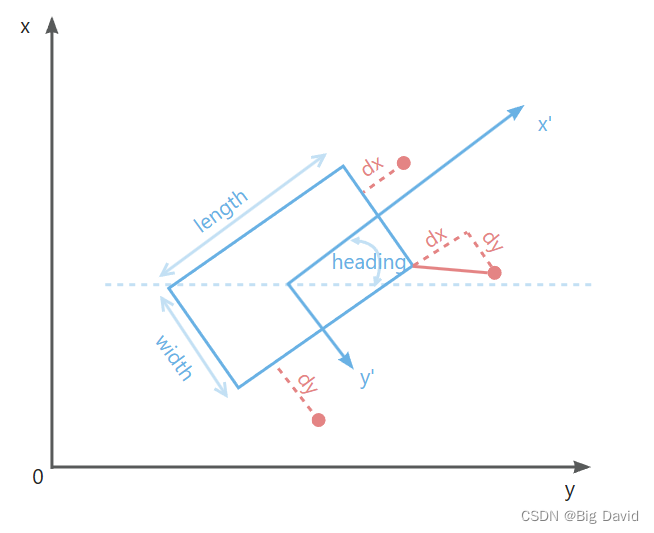
IsPointIn函数检查给定点是否位于由其中心、方向、长度和宽度定义的二维框内
(1)首先计算点相对于长方体中心的x和y分量
(2)然后,它计算点与长方体沿x和y轴的距离,同时考虑长方体的航向。使用航向的余弦和正弦来计算距离。
(3)最后,如果两个距离都小于或等于长方体长度和宽度的一半,加上一个小的ε值(kMathEpsilon),则函数返回true。添加此ε值是为了说明潜在的舍入误差。如果任一距离大于长方体的一半长度或宽度,则函数返回false。
总体思路就是:
(1)以Box的Center为原点,heading方向为X’建立车身坐标系
(2)计算点在车身坐标系下的坐标
假设点的坐标 ( x p , y p ) (x_p,y_p) (xp,yp),Box中心坐标 ( x c , y c ) (x_c,y_c) (xc,yc),Box的heading角度 θ \theta θ,在局部坐标系下的坐标
[ d x d y ] = [ c o s θ s i n θ − s i n θ c o s θ ] [ x p − x 0 y p − y 0 ] \begin{bmatrix} dx\\ dy \end{bmatrix}=\begin{bmatrix} cos\theta & sin\theta\\ -sin\theta &cos\theta \end{bmatrix}\begin{bmatrix} x_p-x_0 \\ y_p-y_0 \end{bmatrix} [dxdy]=[cosθ−sinθsinθcosθ][xp−x0yp−y0]
旋转矩阵是 [ c o s θ − s i n θ s i n θ c o s θ ] \begin{bmatrix} cos\theta & -sin\theta\\ sin\theta &cos\theta \end{bmatrix} [cosθsinθ−sinθcosθ]
(3)判断新坐标的x和y绝对值是否小于半个Box宽度和长度
bool Box2d::IsPointIn(const Vec2d &point) const {const double x0 = point.x() - center_.x();const double y0 = point.y() - center_.y();const double dx = std::abs(x0 * cos_heading_ + y0 * sin_heading_);const double dy = std::abs(-x0 * sin_heading_ + y0 * cos_heading_);return dx <= half_length_ + kMathEpsilon && dy <= half_width_ + kMathEpsilon;
}
判断一个点是否在Boundary上,思路和上面的一样
bool Box2d::IsPointOnBoundary(const Vec2d &point) const {const double x0 = point.x() - center_.x();const double y0 = point.y() - center_.y();const double dx = std::abs(x0 * cos_heading_ + y0 * sin_heading_);const double dy = std::abs(x0 * sin_heading_ - y0 * cos_heading_);return (std::abs(dx - half_length_) <= kMathEpsilon &&dy <= half_width_ + kMathEpsilon) ||(std::abs(dy - half_width_) <= kMathEpsilon &&dx <= half_length_ + kMathEpsilon);
}
double DistanceTo(const Vec2d& point):计算Box到一个点的距离
(1)计算点在局部坐标系下的值
(2)如果 x p ′ x^{'}_p xp′绝对值小于半个车长,则直接用dy作为距离
(3)如果 y p ′ y^{'}_p yp′绝对值小于半个车宽,则直接用dx作为距离
其他情况,返回 d x 2 + d y 2 \sqrt{dx^2+dy^2} dx2+dy2,到角点的距离作为最终的距离
double Box2d::DistanceTo(const Vec2d &point) const {const double x0 = point.x() - center_.x();const double y0 = point.y() - center_.y();const double dx =std::abs(x0 * cos_heading_ + y0 * sin_heading_) - half_length_;const double dy =std::abs(x0 * sin_heading_ - y0 * cos_heading_) - half_width_;if (dx <= 0.0) {return std::max(0.0, dy);}if (dy <= 0.0) {return dx;}return hypot(dx, dy);
}
1.3 多边形
不规则障碍物使用包围盒表示精度低,用多边形Polygon2d来抽象表示。
modules/common/math/polygon2d.h
多边形可以用多个点来表示,也可以用多个边来表示
std::vector<Vec2d> points_;
std::vector<LineSegment2d> line_segments_;
此函数用于从给定的一组点构建多边形
num_points_:多边形中的点数。
points_:Vec2d对象的矢量,表示多边形的点。
area_:多边形的面积。
line_segments_:LineSegment2d对象的矢量,表示连接多边形各点的线段。
is_convex_:一个布尔标志,指示多边形是否是凸的。
min_x_:多边形aabox的最小x值。
max_x_:多边形aabox的最大x值。
min_y_:多边形aabox的最小y值。
max_y_:多边形的aabox的最大y值。
void Polygon2d::BuildFromPoints() {num_points_ = static_cast<int>(points_.size());// 检查点的数量是否至少为3CHECK_GE(num_points_, 3);// 保证点顺时针area_ = 0.0;for (int i = 1; i < num_points_; ++i) {// 使用连接每对点的向量的叉积来计算多边形的面积area_ += CrossProd(points_[0], points_[i - 1], points_[i]);}// 如果面积为负值,则反转点的顺序,以确保它们按顺时针(ccw)顺序排列if (area_ < 0) {area_ = -area_;std::reverse(points_.begin(), points_.end());}area_ /= 2.0;CHECK_GT(area_, kMathEpsilon);// 构建线段line_segments_.reserve(num_points_);// 通过迭代点并将每个点按ccw顺序连接到下一个点来构建线段向量for (int i = 0; i < num_points_; ++i) {line_segments_.emplace_back(points_[i], points_[Next(i)]);}// 检查凸性质is_convex_ = true;for (int i = 0; i < num_points_; ++i) {// 通过计算连接前一点、当前点和下一点的向量的叉积来检查多边形是否是凸,如果叉积小于或等于-kMathEpsilon,则多边形不是凸的if (CrossProd(points_[Prev(i)], points_[i], points_[Next(i)]) <=-kMathEpsilon) {is_convex_ = false;break;}}// 计算aabox.// 最后,它通过找到点的最小值和最大值x和y来计算多边形的轴对齐边界框(aabox)min_x_ = points_[0].x();max_x_ = points_[0].x();min_y_ = points_[0].y();max_y_ = points_[0].y();for (const auto &point : points_) {min_x_ = std::min(min_x_, point.x());max_x_ = std::max(max_x_, point.x());min_y_ = std::min(min_y_, point.y());max_y_ = std::max(max_y_, point.y());}
}
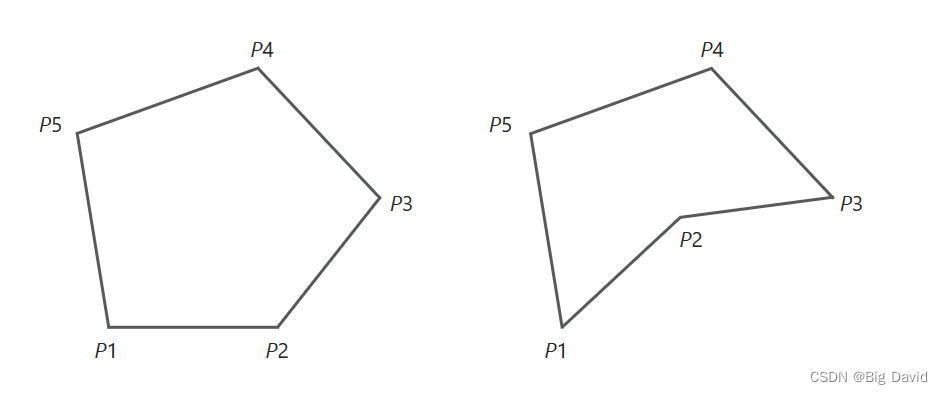
叉积(CrossProd)物理含义是向量组成的平行四边形的面积除以二就是三角形的面积,将所有三角形面积累加可以得到area_,如果area_为负数,说明角点按顺时针(CW)排列,需要进行reverse,从而保证所有的点是逆时针排列的CCW
如果连续的三个点 P i − 1 , P i , P i + 1 P_{i-1},P_i,P_{i+1} Pi−1,Pi,Pi+1有
说明多边形非凸,比如右侧就是
相关文章:
Apollo计算几何算法(一)
Planning模块,路径和速度曲线抽象成折线(Polyline),障碍物抽象成多边形(Polygon)。在碰撞检测、投影计算距离、平滑曲线等方面应用广泛。 1 几何算法 1.1 线段 moudles/common/math/line_segment2d.h n…...

计算机网络、浏览器相关高频面试题
为什么使用CDN 会更快? 没有使用CDN的情况下,用户从浏览器输入地址,依次经过浏览器缓存、操作系统缓存(如本地host文件)、域名解析服务器、根域名解析服务器、顶级域名服务器直到找到对应的ip地址返回给用户ÿ…...

遥感单通道图像保存为彩色图像
系列文章目录 第一章PIL单通道图像处理 文章目录 系列文章目录前言一、代码实现二、问题记录在这里插入图片描述 总结 前言 将单通道图像以彩色图像的形式进行保存主要使用了PIL库 一、代码实现 palette_data [***]:可以进行自定义设置 代码如下: fr…...
如何将字符串转换为整数
将字符串转换为整数是常见的编程需求。以下是几种常见编程语言的示例: Python str_num "123" num int(str_num) print(num) # 输出: 123 JavaScript let str_num "123"; let num parseInt(str_num); console.log(num); // 输…...

如何在Linux上安装使用达芬奇DaVinci-Resolve视频剪辑|附带格式转换脚本
如何在openSUSE-Linux上安装DaVinci-Resolve 您是否还在等待Adobe套件在Linux上的到来?您是否曾多次尝试通过Wine使用Premiere?您是否还在想苹果为什么不以Linux本机版本发布Final Cut Pro? 如果您对所有这些问题中的一个或全部回答是&…...
FlinkAPI开发之数据合流
案例用到的测试数据请参考文章: Flink自定义Source模拟数据流 原文链接:https://blog.csdn.net/m0_52606060/article/details/135436048 概述 在实际应用中,我们经常会遇到来源不同的多条流,需要将它们的数据进行联合处理。所以…...
11 个 Python全栈开发工具集
前言 以下是专注于全栈开发不同方面的 Python 库;有些专注于 Web 应用程序开发,有些专注于后端,而另一些则两者兼而有之。 1. Taipy Taipy 是一个开源的 Python 库,用于构建生产就绪的应用程序前端和后端。 它旨在加快应用程序开发…...
【GDAL】Windows下VS+GDAL开发环境搭建
Step.0 环境说明(vs版本,CMake版本) 本地的IDE环境是vs2022,安装的CMake版本是3.25.1。 Step.1 下载GDAL和依赖的组件 编译gdal之前需要安装gdal依赖的组件,gdal所依赖的组件可以在官网文档找到,可以根据…...
基于sumo实现交通灯控制算法的模板
基于sumo实现交通灯控制算法的模板 目录 在windows安装run hello world networkroutesviewsettings & configurationsimulation 交通灯控制系统 介绍文件生成器类(FileGenerator)道路网络(Network)辅助函数生成道路网络&am…...

设计模式之单例模式的懒饿汉
懒汉式 说白了就是你不叫我我不动,你叫我我才动。 类初始化模式,也叫延迟占位模式。在单例类的内部由一个私有静态内部类来持有这个单例类的实例。因为在 JVM 中,对类的加载和类初始化,由虚拟机保证线程安全。 public class Singl…...

多平台多账号一站式短视频管理矩阵营销系统下载
矩阵营销系统多平台多账号一站式管理,一键发布作品。智能标题,关键词优化,排名查询,混剪生成原创视频,账号分组,意向客户自动采集,智能回复,多账号评论聚合回复,免切换&a…...

go work
vscode gopls插件工具依赖go work,否则会报错 https://github.com/golang/tools/blob/master/gopls/doc/workspace.md Go 1.18 新特性多模块工作区教程-让多模块开发变得简单 - Go语言中文网 - Golang中文社区...
基于JavaWeb+BS架构+SpringBoot+Vue智能菜谱推荐系统的设计和实现
基于JavaWebBS架构SpringBootVue智能菜谱推荐系统的设计和实现 文末获取源码Lun文目录前言主要技术系统设计功能截图订阅经典源码专栏Java项目精品实战案例《500套》 源码获取 文末获取源码 Lun文目录 目 录 目 录 III 第一章 概述 1 1.1 研究背景 1 1.2研究目的及意义 1 1.3…...
SpringSecurity集成JWT实现后端认证授权保姆级教程-授权配置篇
🍁 作者:知识浅谈,CSDN签约讲师,CSDN博客专家,华为云云享专家,阿里云专家博主 📌 擅长领域:全栈工程师、爬虫、ACM算法 💒 公众号:知识浅谈 🔥网站…...

关系型非关系型数据库区别,以MongoDB为例在express中连接MongoDB示例
目录 关系型数据库 关系型数据库常见的类型有: 关系型数据库的优点包括: 非关系型数据库 非关系型数据库常见的类型有: 非关系型数据库的特点包括: 关系型数据库和非关系型数据库区别 MongoDB是什么 MongoDB优势ÿ…...
Java版商城:Spring Cloud+SpringBoot b2b2c实现多商家入驻直播带货及 免 费 小程序商城搭建的完整指南
随着互联网的快速发展,越来越多的企业开始注重数字化转型,以提升自身的竞争力和运营效率。在这个背景下,鸿鹄云商SAAS云产品应运而生,为企业提供了一种简单、高效、安全的数字化解决方案。 鸿鹄云商SAAS云产品是一种基于云计算的软…...
【Spring Boot】SpringBoot maven 项目创建图文教程
创建一个Spring Boot项目并使用Maven进行构建是一项相对简单的任务。以下是使用IntelliJ IDEA创建Spring Boot Maven项目的详细教程: 步骤 1:安装 IntelliJ IDEA 确保你已经安装了最新版本的 IntelliJ IDEA。你可以从官方网站下载并安装。 步骤 2&am…...
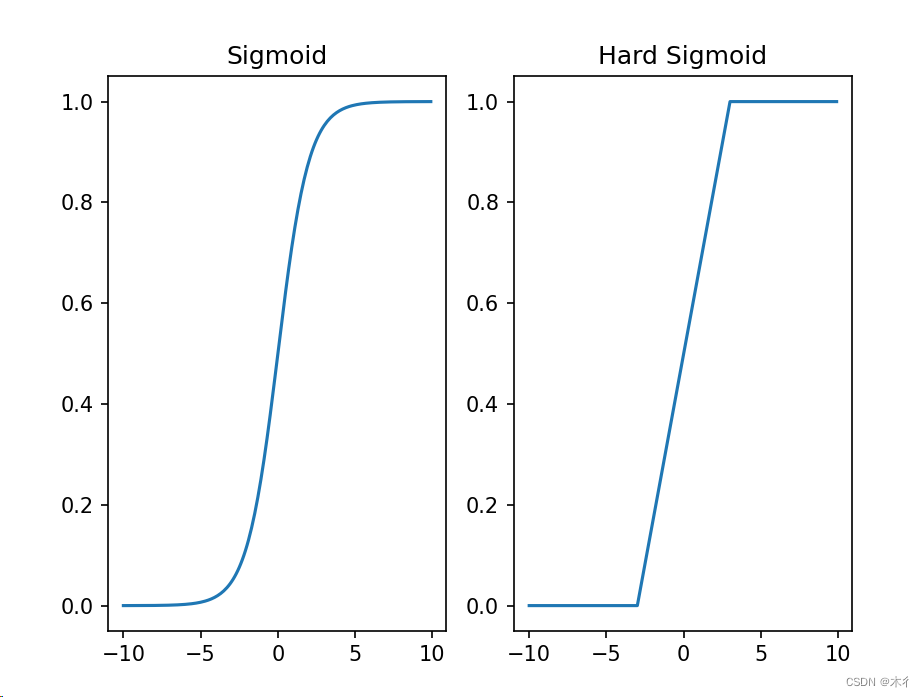
【Python】Sigmoid和Hard Sigmoid激活函数对比总结及示例
Sigmoid和Hard Sigmoid是两种常用的激活函数,它们在神经网络中起到非线性变换的作用。以下是它们之间的对比和优缺点总结: Sigmoid激活函数: 优点: 输出范围是0到1之间,可以用于二分类问题。函数形状相对平滑&#…...

ajax+axios——统一设置请求头参数——添加请求头入参——基础积累
最近在写后台管理系统(我怎么一直都只写管理系统啊啊啊啊啊啊啊),遇到一个需求,就是要在原有系统的基础上,添加一个仓库的切换,并且需要把选中仓库对应的id以请求头参数的形式传递到每一个接口当中。。。 …...
Redis高可用(主从复制、哨兵模式和Cluster集群)
目录 前瞻 主从复制 哨兵 集群 主从复制 主从复制的作用 主从复制流程 搭建Redis主从复制 实验准备 实验流程 修改 Redis 配置文件(Master节点操作) 修改 Redis 配置文件(Slave节点操作) 验证主从效果 哨兵模式 哨兵…...

避坑指南:Vivado增量综合的‘甜蜜区’与‘雷区’——从日志文件看何时该用、何时该弃
Vivado增量综合实战决策手册:如何精准识别高效区间与风险边界 在FPGA开发领域,时间就是竞争力。当项目进入迭代优化阶段,每次按下综合按钮后的等待时间,都可能成为团队效率的隐形杀手。Vivado的增量综合功能就像一把双刃剑——用对…...
完全指南:从概念原理、核心操作到底层实现)
深层分析C++ 二叉搜索树(BST)完全指南:从概念原理、核心操作到底层实现
在计算机科学的世界里,数据结构就像是建筑的基石,而二叉搜索树(Binary Search Tree,简称 BST)则是其中一块极为重要的基石。它不仅在算法设计、数据库管理等领域有着广泛的应用,而且对于理解其他更复杂的数…...

GELab-Zero:面向 Android 的开源移动端 GUI Agent,让 AI 像人一样用手机
GELab-Zero:面向 Android 的开源移动端 GUI Agent,让 AI 像人一样用手机 一、项目介绍:什么是 GELab-Zero?二、移动端 GUI Agent 的技术难点三、项目亮点:GELab-Zero 值得学习的地方1. 模型和基础设施一起开源2. 本地运…...
软件?|应用现状以及发展趋势)
什么制造业电子数据交换(EDI)软件?|应用现状以及发展趋势
一、什么是电子数据交换(EDI)软件电子数据交换(EDI),是制造企业之间按照行业标准,自动完成业务数据传输的数字化工具。EDI软件能够将订单、预测、发货、发票、物料主数据等信息,在企业ERP、MES、…...

3步高效解决Krita AI Diffusion插件IP-Adapter缺失问题
3步高效解决Krita AI Diffusion插件IP-Adapter缺失问题 【免费下载链接】krita-ai-diffusion Streamlined interface for generating images with AI in Krita. Inpaint and outpaint with optional text prompt, no tweaking required. 项目地址: https://gitcode.com/gh_mi…...

高通QCC3084-QCC518X蓝牙耳机项目
高通QCC3084-QCC518X蓝牙耳机项目...

基于ESP8266与TFT屏的桌面智能天气站DIY全攻略
1. 项目概述:打造一个桌面级的智能天气信息中心 几年前,当我第一次把玩ESP8266这块小芯片时,就被它“麻雀虽小,五脏俱全”的特性震撼了——一个比硬币大不了多少的模块,竟然内置了完整的Wi-Fi协议栈和可编程的微控制器…...

算法工程师简历封神指南:项目细节 + 论文 / 竞赛成果缺一不可
引言:算法岗简历的“死亡三连”,你中了吗? “熟悉CNN、Transformer、大模型微调,掌握PyTorch、TensorFlow”——当面试官第88次看到这句“算法词典式”技能描述时,已经开始默默划走简历。2026年算法岗卷到什么程度?智联招聘数据显示,硕士学历算法岗平均竞争比达300:1,…...

四大路径!CS保研生冲刺南京大学如何精准定位?
1. 南京大学计算机保研全景地图 对于计算机专业的保研生来说,南京大学就像一座蕴藏着丰富矿藏的山脉,不同院系代表着不同的矿脉。作为国内顶尖高校,南大计算机相关学科分布在四个主要院系:计算机科学与技术系(传统强系…...

【免费下载】 华为光猫超级用户名密码获取工具
华为光猫超级用户名密码获取工具 【下载地址】华为光猫超级用户名密码获取工具 华为光猫超级用户名密码获取工具是一款专为华为光猫设计的辅助工具,主要用于获取光猫的VLAN ID。该工具通过将一系列命令编写成批处理文件,实现自动化执行,无需用…...