Java并发Condition 详解
1.引言
在Java并发编程中,线程间的协作是一个核心话题。为了实现线程间的协作,Java提供了多种机制,其中等待/通知机制是最常见的一种。在早期版本中,我们通过Object类提供的wait、notify和notifyAll方法来实现这种机制。然而,这些方法在使用上存在一些局限性,比如无法支持多个等待条件、唤醒操作不够灵活等。为了克服这些问题,Java在java.util.concurrent.locks包中引入了Condition接口。
Condition接口提供了一组更为灵活和强大的等待/通知方法,它可以与ReentrantLock等锁配合使用,实现更为复杂的线程同步场景。本文将详细介绍Condition的使用方法、与Object监视器方法的比较、高级特性以及最佳实践,帮助读者更好地理解和应用这一并发编程利器。
2.Condition的基本使用
在使用Condition之前,我们需要先获取一个Condition对象。通常,Condition对象是通过锁对象获取的。在Java中,ReentrantLock类提供了newCondition方法来创建Condition对象。
ReentrantLock lock = new ReentrantLock();
Condition condition = lock.newCondition();
获取到Condition对象后,我们就可以使用它提供的等待和通知方法了。Condition接口中定义了以下几个主要方法:
await(): 使当前线程等待,直到被其他线程唤醒或中断。signal(): 唤醒在此Condition对象上等待的一个线程。signalAll(): 唤醒在此Condition对象上等待的所有线程。
这些方法的使用方式与Object类的wait、notify和notifyAll方法类似,但提供了更多的灵活性和控制力。
下面,我们通过一个经典的生产者-消费者问题来演示Condition的基本用法。在这个问题中,生产者和消费者共享一个有限容量的缓冲区,生产者负责生产数据并放入缓冲区,消费者负责从缓冲区取出数据并消费。
class BoundedBuffer {final Lock lock = new ReentrantLock();final Condition notFull = lock.newCondition();final Condition notEmpty = lock.newCondition();final Object[] items;int putptr, takeptr, count;public BoundedBuffer(int capacity) {this.items = new Object[capacity];}// 生产者方法:放入数据public void put(Object item) throws InterruptedException {lock.lock();try {while (count == items.length) {// 缓冲区满,等待消费者消费notFull.await();}items[putptr] = item;if (++putptr == items.length) putptr = 0;++count;// 唤醒等待取数据的消费者notEmpty.signal();} finally {lock.unlock();}}// 消费者方法:取出数据public Object take() throws InterruptedException {lock.lock();try {while (count == 0) {// 缓冲区空,等待生产者生产notEmpty.await();}Object item = items[takeptr];if (++takeptr == items.length) takeptr = 0;--count;// 唤醒等待放数据的生产者notFull.signal();return item;} finally {lock.unlock();}}
}
在上面的代码中,我们使用了两个Condition对象:notFull和notEmpty,分别表示缓冲区非满和非空的条件。生产者线程在缓冲区满时调用notFull.await()方法等待,消费者线程在缓冲区空时调用notEmpty.await()方法等待。当条件满足时,相应的线程会被唤醒,并继续执行。
通过这种方式,我们可以实现生产者和消费者之间的高效协作,避免了忙等和无效唤醒等问题。
3.Condition与Object的监视器方法的比较
在Java中,Object类提供了wait、notify和notifyAll这三个监视器方法用于线程间的等待和通知。然而,随着并发编程的复杂性增加,这些方法在某些场景下显得捉襟见肘。相比之下,Condition接口提供了更为丰富和灵活的功能。
- 多条件支持:一个关键的区别在于
Condition支持多个等待条件。这意味着,对于一个锁,我们可以创建多个Condition对象,每个对象代表一个不同的等待条件。这在处理复杂的多条件同步问题时非常有用。而Object的监视器方法则只能支持一个等待条件,即所有线程都在同一个对象上等待和被通知。 - 灵活性:
Condition提供了可中断等待(awaitInterruptibly)和定时等待(awaitUntil)的功能,这使得在等待过程中可以更好地处理中断和超时情况。而Object的wait方法则不具备这些特性,一旦线程开始等待,它只能被其他线程显式唤醒或遇到中断异常时才能退出等待状态。 - 与锁的结合:
Condition是与Lock接口紧密结合的,它必须配合Lock使用。这种结合使得Condition在等待和通知时可以更精细地控制锁的释放和获取。而Object的监视器方法则是与每个对象自带的内部锁(即synchronized关键字所使用的锁)结合使用的,这种锁的粒度较大,控制起来相对粗糙。
4.Condition的高级特性
除了基本的使用方法和与Object监视器方法的比较外,Condition还提供了一些高级特性,使得它在处理复杂并发问题时更加得心应手。
- 公平与非公平模式:
Condition的公平与非公平模式取决于与它配合的Lock的实现。ReentrantLock类提供了公平和非公平两种模式。在公平模式下,等待时间最长的线程将获得优先执行权;而在非公平模式下,则没有这种保证。这使得Condition可以根据需要选择不同的同步策略。 - 可中断等待与定时等待:如前所述,
Condition提供了awaitInterruptibly和awaitUntil方法,支持可中断等待和定时等待。这使得在等待过程中可以更好地处理中断和超时情况,提高了程序的响应性和健壮性。
5.常见问题
- 虚假唤醒:
Condition的await方法可能会在没有收到通知的情况下返回,这种情况被称为“虚假唤醒”。为了避免这种情况对程序的影响,我们通常在await方法的调用处使用循环来检查条件是否真正满足。 - 死锁与活锁的预防:在使用
Condition时,需要注意避免死锁和活锁的发生。死锁是指两个或多个线程无限期地等待彼此释放资源;而活锁则是指线程们不断改变状态以尝试解决问题,但最终无法取得进展。为了避免这些问题,我们可以遵循一些最佳实践,如按顺序获取锁、使用tryLock方法尝试获取锁等。 - 性能调优建议:在使用
Condition时,还需要注意性能调优。例如,尽量减少锁的持有时间、避免在持有锁的情况下执行耗时操作等。这些措施可以提高程序的并发性能和响应性。
6.总结
Condition接口在Java并发编程中的重要性和优势。它提供了更为灵活和强大的等待/通知机制,支持多条件同步、可中断等待和定时等待等高级特性。在使用Condition时,我们需要注意一些常见问题,以确保程序的正确性和性能。
相关文章:

Java并发Condition 详解
1.引言 在Java并发编程中,线程间的协作是一个核心话题。为了实现线程间的协作,Java提供了多种机制,其中等待/通知机制是最常见的一种。在早期版本中,我们通过Object类提供的wait、notify和notifyAll方法来实现这种机制。然而&…...

如何使用CentOS系统中的Apache服务器提供静态HTTP服务
在CentOS系统中,Apache服务器是一个常用的Web服务器软件,它可以高效地提供静态HTTP服务。以下是在CentOS中使用Apache提供静态HTTP服务的步骤: 1. 安装Apache服务器 首先,您需要确保已安装Apache服务器。可以使用以下命令安装Ap…...
Python入门0基础学习笔记
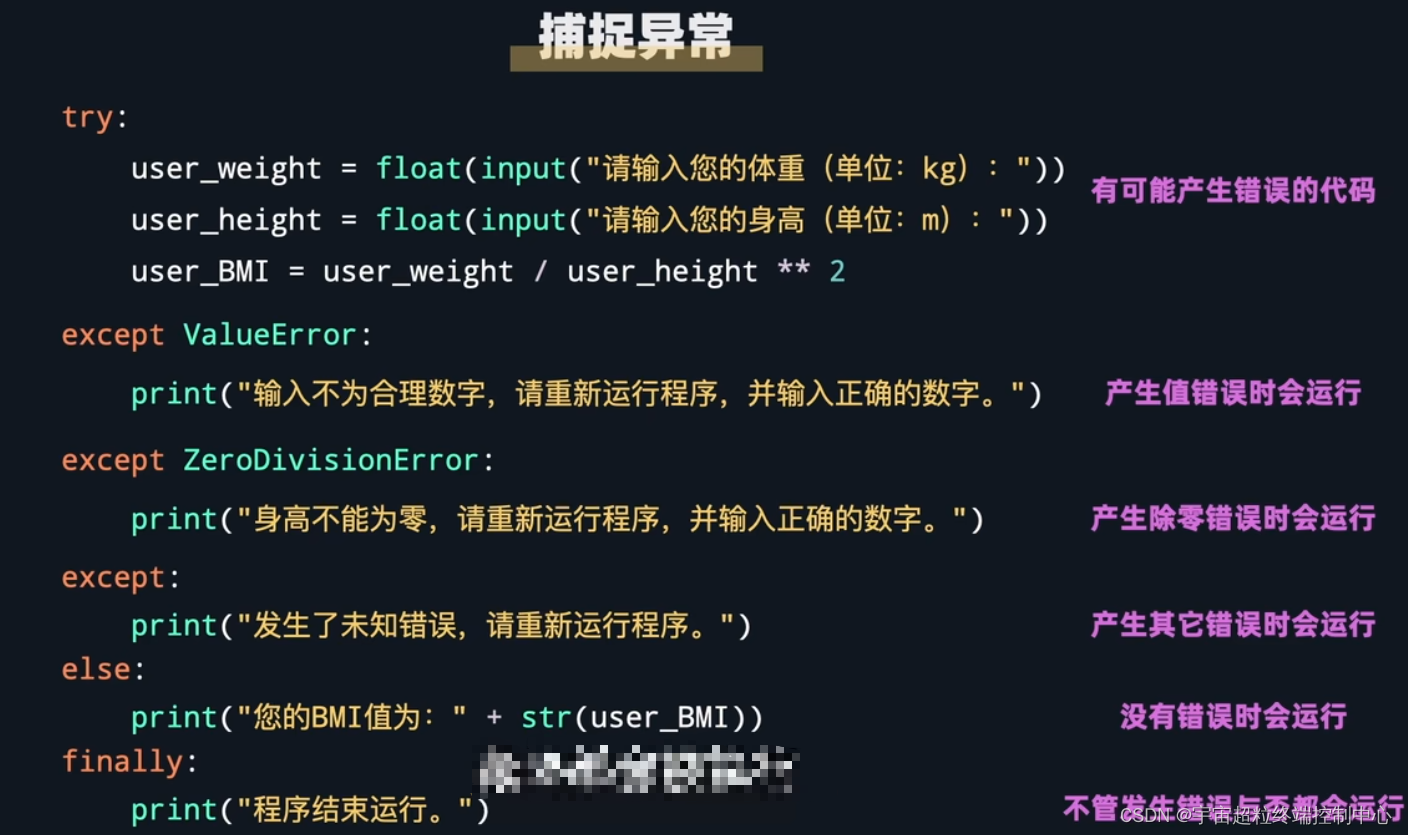
1.编程之前 在编写代码之前,还有两件事需要做: 安装 Python 解释器:计算机是没法直接读懂 Python 代码的,需要一个解释器作为中间的翻译,把代码转换成字节码之后再执行。 Python 是翻译一行执行一行。一般说的安装 …...
python绘制热力图-数据处理-VOC数据类别标签分布及数量统计(附代码)
前言 当你需要统计训练数据中每个类别标签有多少,并且想知道坐标中心分布在图像的位置信息时,你可以利用一下脚本进行计算! 步骤 要绘制热力图来分析VOC数据的分布统计,可以按照以下步骤进行: 数据处理࿱…...

【回顾2023,展望2024】砥砺前行
2023年总结 转眼间,迎来了新的一年2024年,回顾2023,对于我来说是一个充满平凡但又充实又幸运的一年。这一年经历了很多的事情,包括博客创作、技术学习、出书、买房等,基本上每件事情都是一个前所未有的挑战和机遇、使…...

Stable Diffusion初体验
体验了下 Stable Diffusion 2.0 的图片生成,效果还是挺惊艳的,没有细调prompt输入,直接输入了下面的内容: generate a Elimination Game image of burnning tree, Cyberpunk style 然后点击生成,经过了10多秒的等待就输…...

缓存解析:从架构设计到Redis应用及最佳实践
典型架构设计中缓存的存储位置 在现代软件架构中,缓存是优化数据检索、提高应用性能的关键组件。缓存的存储位置多种多样,每个位置针对特定的优化目标和需求。理解这些层级对于设计高效的系统至关重要。 浏览器缓存:这是最接近用户端的缓存层…...
【C#】使用 LINQ 中的 Skip() 和 Take()进行分页,为什么要分页,分页作用是什么
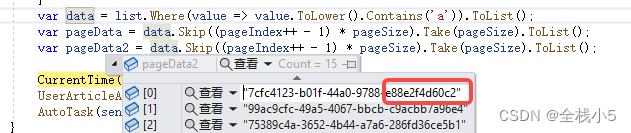
欢迎来到《小5讲堂》 大家好,我是全栈小5。 这是是《C#》序列文章,每篇文章将以博主理解的角度展开讲解, 特别是针对知识点的概念进行叙说,大部分文章将会对这些概念进行实际例子验证,以此达到加深对知识点的理解和掌握…...

2024云服务器哪家好?阿里云、腾讯云、华为云
作为多年站长使市面上大多数的云厂商的云服务器都使用过,很多特价云服务器都是新用户专享的,本文有老用户特价云服务器,阿腾云atengyun.com有多个网站、小程序等,国内头部云厂商阿里云、腾讯云、华为云、UCloud、京东云都有用过&a…...

docker compose安装gitlab
环境 查看GitLab镜像 docker search gitlab 拉取GitLab镜像 docker pull gitlab/gitlab-ce 准备gitlab-docker.yml文件 version: 3.1 services:gitlab:image: gitlab/gitlab-ce:latestcontainer_name: gitlabrestart: alwaysenvironment:GITLAB_OMNIBUS_CONFIG: |external_url…...

Nginx——基础配置
和大多数软件一样,Nginx也有自己的配置文件,但它又有很多与众不同的地方,本帖就来揭开Nginx基础配置的面纱。 1、Nginx指令和指令块 了解指令和指令块有助于大家了解配置的上下文,下面是一个配置模板示例: 在这个配…...
)
计算机基础(存储单位)
1. 计算机中的存储单位有哪些 1.1 常见的计算机存储单位 计算机存储单位一般用bit、B、KB、MB、GB、TB、PB、EB、ZB、YB、BB、NB、DB……来表示,如下所示: bit位、比特byte(B)字节、字Kill Byte(KB)千字…...
Leetcode 494 目标和
题意理解: 给你一个非负整数数组 nums 和一个整数 target 。 向数组中的每个整数前添加 或 - ,然后串联起所有整数,可以构造一个 表达式 : 例如,nums [2, 1] ,可以在 2 之前添加 ,在 1 之前添…...
)
Windows常用命令(文件相关、进程相关、网络相关、用户相关、特殊符号)
Windows常用命令 Windows常用命令 Windows常用命令0x01 基础操作0x02 文件操作0x03 进程操作0x04 网络相关0x05 用户相关0x06 特殊符号 0x01 基础操作 清屏:cls 关机:shutdown -s(关机)-r(重启) -f(强制)…...

摘:国六排放法规下的重型车车载终端的革新
系列文章目录 文章目录 系列文章目录一、国六排放法规下的重型车车载终端的革新二、使用步骤1.引入库2.读入数据 一、国六排放法规下的重型车车载终端的革新 添加链接描述 ascii码 二、使用步骤 1.引入库 代码如下(示例): import numpy a…...

java读取json文件并解析并修改
要在Java中读取和解析JSON文件,可以使用Java提供的JSON库,例如Jackson、Gson或JSON.simple。以下是使用Jackson库的示例代码: 首先,你需要添加Jackson库的依赖到你的项目中。如果你正在使用Maven,可以在pom.xml文件中…...

2024年前端面试中JavaScript的30个高频面试题之基础知识
中级 高级知识 充分准备你的下一个JavaScript面试,增强信心! 无论你是老手还是刚进入技术行业,这份2024年必备资源都将帮助你复习核心概念,从基本语言特性到高级主题。 在本文中,我汇总了30个最关键的JavaScript面试题以及详细的答案和代码示例。 深入探索这宝贵的收藏,以确…...

鸿蒙设备-开发板基础学习(BearPi-HM Micro)
theme: minimalism 每当学习一门新的编程语言或者上手一款新的开发板,在学习鸿蒙设备开发过程中,带大家写的第一个程序,通过这个程序,我们可以对鸿蒙设备开发的整个流程有一个初步的体验。BearPi-HM Micro开发板为例:…...

Oracle导入导出dump
创建目录: create directory *** as /bak; #***名称可以随便命名 需要手工创建/bak,并且此目录oracle用户有读取,目录地址空间要够用。 查看所有目录 select * from DBA_DIRECTORIES;---查询导入导出的目录 导入 impdp ****/**** direc…...

判断vector、string是否存在某个元素
1、string字符串中是否存在某个字符(char) string中find()返回值是字母在母串中的位置(下标索引),如果没有找到,那么会返回一个特别的标记npos。(返回值可以看成是一个int型的数) …...

Axelspace 太空公司牵头联合体入选日本太空战略基金项目 “提升下一代地球观测卫星能力技术”
—— 通过卫星星座与航空器开展特定排放源二氧化碳排放与吸收监测,打造气候解决方案,开拓全新市场机遇 Axelspace 太空公司、明星电气株式会社、全日空控股株式会社及 JIJ 株式会社联合宣布,各方共同申报的技术研发项目成功入选日本宇宙航空…...

Agent能实现7×24小时无人值守运营吗?——深度拆解AI Agent端到端自动化落地路径
随着大模型技术的演进,AI Agent(人工智能体)已不再局限于简单的对话交互,而是进化为能够自主规划、调用工具并执行复杂任务的数字员工。针对“Agent能实现724小时无人值守运营吗?”这一核心疑问,答案是肯定…...

GLM-OCR部署避坑:CPU模式也能用,无显卡用户详细指南
GLM-OCR部署避坑:CPU模式也能用,无显卡用户详细指南 你是不是也遇到过这种情况:看到别人用AI模型轻松识别文档、提取表格,自己也想试试,结果一查部署要求——“需要NVIDIA显卡,显存8GB以上”。手头只有一台…...

新手零压力入门,快马ai带你三步搞定nodejs环境配置
最近在帮几个朋友入门Node.js时,发现很多新手卡在了环境配置这一步。作为一个过来人,我完全理解那种面对命令行手足无措的感觉。好在现在有了InsCode(快马)平台,可以快速生成一个专为Node.js新手设计的入门项目模板,把抽象的配置过…...

2026年3月上海污水处理设备生产厂家推荐:十大口碑产品评测对比知名
步入2026年3月,随着环保政策持续收紧与工业智能化升级的双重驱动,企业对污水处理设备的需求已从单纯的“达标排放”转向“高效、智能、全生命周期成本最优”。根据中国环保产业协会发布的《2026年度水处理装备市场趋势报告》,超过68%的采购决…...

别再只跑例程了!深入解析ESP32S3的Camera模块:从DVP时序到图像缓冲区的底层逻辑
深入解析ESP32S3的Camera模块:从DVP时序到图像缓冲区的底层逻辑 当你在ESP32S3上成功运行了第一个Camera例程,看到LCD屏幕上显示出模糊的测试图像时,那种成就感可能很快就会被新的疑问取代:为什么图像有时会卡顿?为什么…...

大厂AI团队配置揭秘:揭秘“预训练→后训练→推理部署→多模态扩展“的技术链路拆分逻辑!
大模型AI技术链路包含预训练、后训练、推理部署、多模态扩展四个不可逆环节,对技术能力和GPU资源需求各异。大厂将AI部门拆分为独立团队,以适配链路原理、提升研发效率。预训练团队负责构建通用基座模型,后训练团队进行能力校准,推…...

Overleaf-Workshop:在VSCode中实现Open Overleaf项目的无缝协作与高效管理
Overleaf-Workshop:在VSCode中实现Open Overleaf项目的无缝协作与高效管理 【免费下载链接】Overleaf-Workshop Open Overleaf/ShareLaTex projects in vscode, with full collaboration support. 项目地址: https://gitcode.com/gh_mirrors/ov/Overleaf-Workshop…...

安装lsaac lab
在 Ubuntu 22.04 环境下,使用 Conda 管理 Isaac Lab 是最稳妥的方案,因为它可以完美隔离 Isaac Sim 所需的特定 Python 版本环境。以下是基于 Conda 的保姆级安装步骤:第一步:创建 Conda 环境Isaac Sim 4.x 需要 Python 3.10&…...

MogFace人脸检测工具实操案例:从监控截图提取人脸ROI用于后续关键点分析
MogFace人脸检测工具实操案例:从监控截图提取人脸ROI用于后续关键点分析 1. 引言:从监控画面到精准分析 想象一下,你手头有一堆从监控摄像头截取的图片,里面可能有多个人脸,有的正对着镜头,有的侧着脸&am…...